一种集装箱空箱声学智能检测方法及系统
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及集装箱检测技术领域,尤其是一种集装箱空箱声学智能检测方法。
背景技术
随着我国对外贸易的飞速发展,进出关时对集装箱监管的任务越来越繁重,在工业自动化和智能科技的新技术革命浪潮下,高性能智能化集装箱监管技术的需求就越来越强烈。
当前集装箱空箱检测技术按智能化程度主要分为三大类:一类是传统的全人工验视和决策的方式;第二类是自动化摄像机或X射线的视觉验视和人工决策的半智能化方式,如专利(授权公告号CN 216927109U)通过位于升降机上的拍摄件对集装箱进行拍摄来判断是否为空箱。专利(授权公告号CN216013666U)与专利(授权公告号CN217112754U)分别提供了通过激光雷达和三维激光扫描仪探测对集装箱的头端和/或者尾端进行空箱检测的方法;专利(授权公告号CN113409239B)提出了一种基于辐射成像的集装箱空箱检测方法。对于以上两类技术来说,检测效率低,且存在人为不稳定因素导致的准确率不高等严重问题,其中射线型检测方式还存在设备成本过高、检测所用的物理介质对人员和环境存在辐射危害等问题;第三类就是采用声学等物理手段和机器学习决策的全智能化方式,如专利(授权公告号CN 107621653B)利用利用敲击或/和换能器同时进行作为箱体激励源,通过加速度传感器采集信号,通过分析箱内混响、共振频率、相干性或以上任意组合得出集装箱空或非空情况。专利(授权公告号CN 207751939U)提供了一种集装箱检测仪,通过机械臂将空箱检测装置移动至箱体底梁位置进行激励,并采集的箱体声波频率,可以准确判断集装箱是否为空箱、夹层的情况。专利(授权公告号CN110231402B)提供了一种集装箱检测方法及装置,对集装箱上的指定位置采用气介激励信号进行激励,采集集装箱上复合振动响应信号,并提取出特征送神经网络等深度学习模型智能识别集装箱的状态。对于以上声学智能检测技术与产品来说,所采用的检测特征(如共振频率、响应衰减速率等)在实际应用中存在以下缺陷:1、检测特征在空箱和非空箱状态时差异性较小,灵敏度差且不稳定;2、容易受环境噪声、箱体壁板局部模态、箱体材质差异等不可控因素的影响。以上缺陷导致现有声学智能检测技术的实际检测准确率没有保证,使用效果不佳。
发明内容
针对上述现有技术中存在的不足,本发明的目的在于提供一种具备智能化程度与检测准确率高,能较好满足实际使用需求的集装箱空箱声学智能检测方法及系统。
为了实现上述目的,本发明采用如下技术方案:
一种集装箱空箱声学智能检测方法,包括以下步骤:
S1:利用视觉检测方法获取入场箱体的大小与位置信息,并通过自动布放装置将声激励与声接收装置准确布置在相应的指定位置处;
S2:通过声激励装置对箱体进行声激励,同时通过声接收装置中的传声器同步采集箱体声响应信号;
S3:利用传递函数法对响应信号进行降噪处理,获得各测点的真实频谱估计;
S4:通过声学分簇算法计算箱体声学分簇信号,并提取箱体的声学簇特征;
S5:将提取的声学簇特征与步骤S1识别箱体的参考声学簇特征进行比对,实现箱体状态的智能检测判断。
优选地,所述步骤S1中声激励设备的个数为1个,其指定工作位置位于箱体的一个角点。
优选地,所述步骤S1中声接收设备中传声器的个数为多个,其中一个指定工作位置为与声激励设备位置相同的箱体角点,其余指定工作位置分别位于至少2个箱体表面的各个角点。
优选地,所述步骤S3中各测点的真实频谱估计
其中,
优选地,所述步骤S4中箱体声学分簇算法,计算方法如下:
对位于每个布置了测点的箱体表面四个角点信号向量
其中T=(t
优选地,所述步骤S4中箱体的声学簇特征,提取方法如下:
对第j个布置了测点的箱体表面的声学分簇信号
优选的,上述集装箱空箱声学智能检测方法,步骤S5中箱体状态的智能检测判断,方法如下:
将被检箱体的声学簇特征[S
按照本发明的另一个方面,还提供了一种集装箱空箱声学智能检测系统,该系统包括视觉检测模块、声激励与接收模块、包含自动布放装置的支架平台、数据采集与预处理模块和包含相关算法的计算机操控系统组成;
所述视觉检测模块,用于检测箱体的大小与位置信息;
所述声激励与接收模块,用于在指定位置处对箱体进行声激励,并在指定位置处接收箱体的声响应信号;
所述包含自动布放装置的支架平台,用于安装视觉检测模块、声激励与接收模块等设备,并根据要求自动布放与回收声激励与接收模块;
所述数据采集与预处理模块,用于采集箱体声响应等信号,并完成滤波等预处理功能;
所述计算机操控系统,用于执行全部视觉检测、自动布放与回收控制、数据采集与分析处理、数据读写与结果输出等程序与算法。
由于采用了上述方案,本发明提供的集装箱空箱声学智能检测方法与系统,利用传递函数法对箱体响应信号进行降噪处理,并通过箱体声学分簇算法提取被检箱体的声学簇特征,具有检测特征灵敏、稳定性与抗干扰能力俱佳的优点,提高了检测结果的准确性和稳定性;利用视觉检测方法获取箱体的大小与位置信息,自动布放与回收声激励与声接收装置,通过提取箱体声学簇特征并与参考声学簇特征进行对比,实现箱体状态的自动检测判断,智能化程度高,有利于实际检测的推广应用。
附图说明
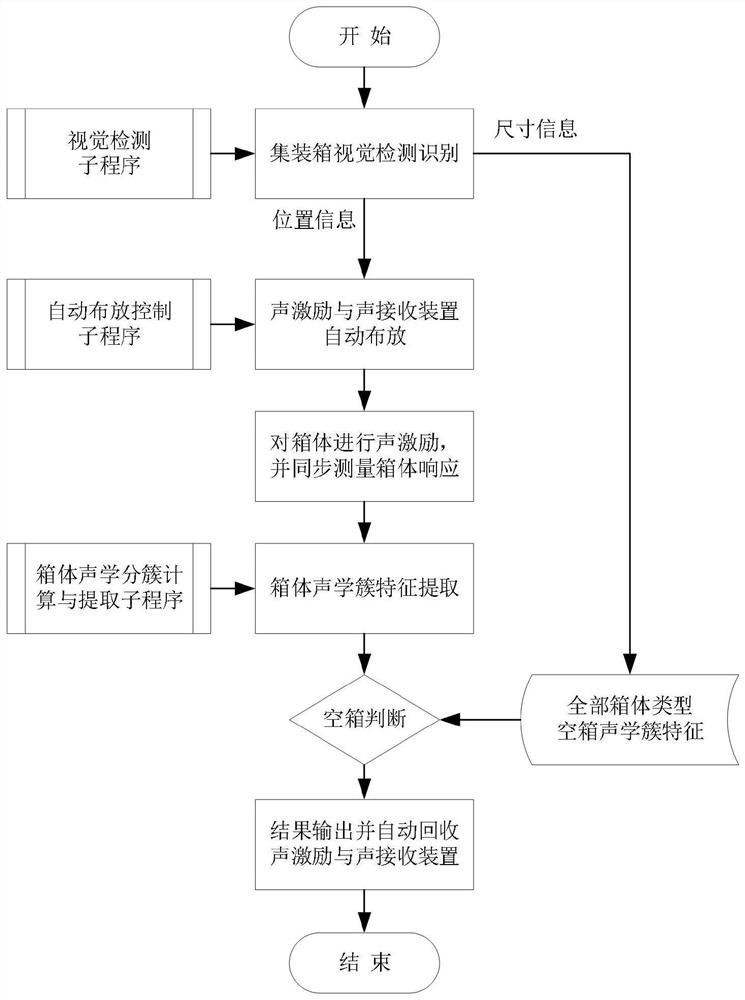
图1是本发明实施例的集装箱空箱声学智能检测方法流程示意图。
图2是本发明实施例的声激励设备与传声器的指定工作位置示意图。
图3是本发明实施例的箱体两个测量表面的声学分簇信号计算结果。
图4是本发明实施例的集装箱空箱声学智能检测系统结构示意图
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。可以是机械连接,也可以是电连接。可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
如图1至图4所示,其中图1是本发明实施例提供的一种集装箱空箱声学智能检测方法流程示意图,包括以下步骤:
S1:利用视觉检测方法获取入场箱体的大小与位置信息,并通过自动布放装置将声激励与声接收装置准确布置在相应的指定位置处。
在本实施例中,如图2所示,声激励设备的个数为1个,其指定工作位置位于箱体的一个角点;声接收设备中传声器的个数为7个,其中1个为参考传声器,其指定工作位置为与声激励设备位置相同的箱体角点,其余6个为指定工作位置分别位于2个箱体表面的各个角点。
S2:通过声激励装置对箱体进行声激励,同时通过声接收装置中的传声器同步采集箱体声响应信号。
在本实施中所用的声激励装置为高声强的电声换能器,在指定的工作位置处产生声压级大于120dB的脉冲声信号对箱体进行激励。位于2个箱体表面各个角点的传声器通过参考传声器的信号幅值预触发的方式同步采集箱体声响应信号。
S3:利用传递函数法对响应信号进行降噪处理,获得各测点的真实频谱估计。
实际检测工作环境中存在各种环境噪,会严重降低箱体响应信号的信噪比,从而影响最终的箱体状态检测准确度。
在本实施例中,采用传递函数法对响应信号进行降噪处理,各测点的真实频谱估计
其中,
S4:通过声学分簇算法计算箱体声学分簇信号,并提取箱体的声学簇特征。
空箱检测中的一般检测特征(如共振频率、响应衰减速率等)在实际应用中存在灵敏度差且不稳定,易受环境噪声、箱体壁板局部模态、箱体材质差异等干扰影响的缺陷。
为了解决以上问题,在本实施例中,先采用声学分簇算法计算箱体声学分簇信号,计算方法如下:
对位于每个布置了测点的箱体表面四个角点信号向量
其中T=(t
图3分别给出了箱体两个测量表面的声学分簇信号计算结果。
然后,采用以下方法提取箱体声学簇特征:
对第j个布置了测点的箱体表面的声学分簇信号
由以上方法得到2个布置了测点箱体表面在频率点k的声学簇特征S
S5:将提取的声学簇特征与步骤S1识别箱体的参考声学簇特征进行比对,实现箱体状态的智能检测判断。
在本实施例中,箱体状态的智能检测判断方法如下:
将被检箱体的声学簇特征[s
若箱体状态与经S1步骤识别的箱体空箱状态相同时,则有cos(a,b)=1,由此可判断为空箱状态,否则为非空箱状态。
例如,图3中箱体在17.5Hz的组合声学簇特征a为[1 0 0 0 0 1 0 0],若经S1步骤识别的箱体参考声学簇特征b为[1 0 0 0 0 1 0 0],则计算有cos(a,b)=1,可判断为空箱状态。
本实施例还提供了一种集装箱空箱声学智能检测系统,主要由视觉检测模块、声激励与接收模块、包含自动布放装置的支架平台、数据采集与预处理模块和包含相关算法的计算机操控系统组成,其结构示意如图4所示。
其中,视觉检测模块,用于检测箱体的大小与位置信息;声激励与接收模块,用于在指定位置处对箱体进行声激励,并在指定位置处接收箱体的声响应信号;包含自动布放装置的支架平台,用于安装视觉检测模块、声激励与接收模块等设备,并根据要求自动布放与回收声激励与接收模块;数据采集与预处理模块,用于采集箱体声响应等信号,并完成滤波等预处理功能;计算机操控系统,用于执行全部视觉检测算法、自动布放与回收控制指令、数据采集与分析处理算法、数据读写与结果输出等程序与算法。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种集装箱图像采集系统及集装箱装载状态检测方法
- 一种集装箱旋锁检测系统及检测方法
- 一种电池集装箱智能供电系统的供电方法
- 一种用于智能叉车臂故障的检测系统、检测方法及其处理方法
- 一种集装箱号的智能检测识别系统及方法
- 一种用于集装箱分布轮廓和位置智能化检测系统及方法