口咽拭子采集机构及采集方法
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及医疗检测技术领域,尤其涉及一种口咽拭子采集机构及采集方法。
背景技术
新冠病毒核酸检测结果是新型冠状病毒肺炎诊断和疗效评价的重要参考,核酸检测筛查标本多来源于深咳痰液或者咽拭子,咽拭子分为鼻咽拭子和口咽拭子。
现有的口咽拭子采集大多都是人工采集,需要安排不同的医护人员进行扫码验证信息、测温、检测等工作。在具体检测过程中,由医护人员通过棉签蘸取患者口咽中咽后壁及扁桃体处的唾液,再将棉签折断存放于试管内,再将试管收集存放。由于待检测人群数量巨大,因此采样工作负荷高、体力消耗大,极易造成医护人员的极大疲劳。
因此,有必要提供一套自动化的口咽拭子采集机构及采集方法,来代替人工采集,将医务人员从繁杂的采样工作中解放出来。
发明内容
本发明的目的在于提供一种能够实现试管条码扫描、口咽拭子裁剪、采集样品收集保存全流程自动化的口咽拭子采集机构。
本发明的另一目的在于提供一种能够实现试管条码扫描、口咽拭子裁剪、采集样品收集保存全流程自动化的口咽拭子采集方法。
为实现上述目的,本发明的技术方案为:提供一种口咽拭子采集机构,其包括存放单元、扫码单元、夹持单元、裁剪单元、三轴转运开盖单元以及控制器;其中,存放单元包括第一存放区及第二存放区,所述第一存放区用于存放空试管,所述第二存放区用于存放装有口咽拭子的待测试管;扫码单元其包括设于所述存放单元的一侧的扫描仪,所述扫描仪用于扫描试管上的二维码;夹持单元设于所述存放单元的一侧并包括定位夹爪,所述定位夹爪用于夹持固定试管并可打开;裁剪单元其包括设于所述夹持单元上方的气动剪刀,所述气动剪刀用于裁剪口咽拭子;三轴转运开盖单元包括三轴驱动模组及连接于所述三轴驱动模组的夹持开盖夹爪,所述三轴驱动模组驱动所述夹持开盖夹爪沿X轴、Y轴或Z轴移动以将空试管由所述第一存放区转运至所述夹持单元以及将待测试管由所述夹持单元转运至所述第二存放区;控制器,其分别与所述三轴转运开盖单元、所述扫码单元、所述夹持单元、所述裁剪单元电连接。
较佳地,所述夹持单元还包括底座及固定于所述底座的第一驱动器,所述第一驱动器连接并驱动所述定位夹爪打开或闭合,所述底座上对应于所述定位夹爪的位置设有与试管相对应的定位槽。
较佳地,所述裁剪单元还包括连接于所述气动剪刀的第二驱动器,所述第二驱动器驱动所述气动剪刀于所述定位夹爪上方的第一位置以及远离所述定位夹爪的第二位置之间移动。
较佳地,所述三轴驱动模组包括X轴驱动模组、Y轴驱动模组以及Z轴驱动模组,所述夹持开盖夹爪安装于所述Z轴驱动模组,且所述X轴驱动模组、所述Y轴驱动模组、所述Z轴驱动模组分别与所述控制器电连接。
较佳地,所述夹持开盖夹爪包括旋转驱动器及与之连接的夹爪,所述旋转驱动器驱动所述夹爪旋转以对试管上的二维码进行扫描。
较佳地,所述第一存放区具有多个第一试管架,所述第二存放区具有多个第二试管架,所述第一试管架、所述第二试管架上均设有多个用于容纳试管的容置孔。
较佳地,所述口咽拭子采集机构还包括消毒单元,其设于所述三轴驱动模组的移动路径上并位于所述夹持单元、所述存放单元之间,其包括箱体、设于所述箱体上的喷头、设于所述箱体内的定位座,所述三轴驱动模组将待测试管转运至所述定位座后,通过所述喷头喷洒消毒液以对待测试管进行消毒。
对应地,本发明还提供一种使用如上所述的口咽拭子采集机构的口咽拭子采集方法,其包括如下步骤:
(1)获取预设的单只试管的口咽拭子数量;
(2)控制所述三轴转运开盖单元运行,将所述第一存放区的空试管转运至所述扫码单元;
(3)控制所述三轴转运开盖单元运行以带动其上的所述空试管旋转,以使所述扫描仪对所述空试管上的二维码进行扫描;
(4)控制所述三轴转运开盖单元运行以将所述空试管转运至所述夹持单元,由所述定位夹爪将所述空试管夹持固定;
(5)控制所述气动剪刀对所述定位夹爪上方的采集后的口咽拭子进行裁剪,以使裁剪后的所述口咽拭子掉入所述空试管内;
(6)判断单只试管的口咽拭子数量是否裁剪完成,若是,则进行步骤(7),若否,则返回步骤(5);
(7)控制所述三轴转运开盖单元运行,将装有预设数量的口咽拭子数量的待测试管从所述夹持单元转运至所述第二存放区,并返回所述步骤(1)。
较佳地,在本发明的口咽拭子采集方法中,所述步骤(4)具体包括如下步骤:
(41)控制所述夹持单元的第一驱动器运行以驱动所述定位夹爪打开;
(42)控制所述三轴转运开盖单元运行以将其夹持开盖夹爪上的所述空试管防放置于所述夹持单元的底座上的定位槽内;
(43)控制所述第一驱动器运行以驱动所述定位夹爪闭合以夹持固定所述空试管;
(44)控制所述三轴转运开盖单元的夹持开盖夹爪松开所述空试管并移离。
较佳地,在本发明的口咽拭子采集方法中,所述步骤(6)具体包括如下步骤:
(61)控制所述三轴转运开盖单元运行以将所述待测试管从所述夹持单元转运至消毒单元,通过所述消毒单元对所述待测试管进行消毒;
(62)再次控制所述三轴转运开盖单元运行以将消毒后的所述待测试管转运至所述第二存放区。
与现有技术相比,由于本发明的口咽拭子采集机构,通过存放单元、扫码单元、夹持单元、裁剪单元、三轴转运开盖单元的配合,实现口咽拭子采集过中试管条码扫描、口咽拭子裁剪、采集样品收集保存的全自动化过程,代替现有技术中人工采集的方式,将医务人员从繁杂的采样工作中解放出来,解决人工采集劳动强度大的问题。
对应地,利用本发明之口咽拭子采集机构的口咽拭子采集方法,也具有相同的技术效果。
附图说明
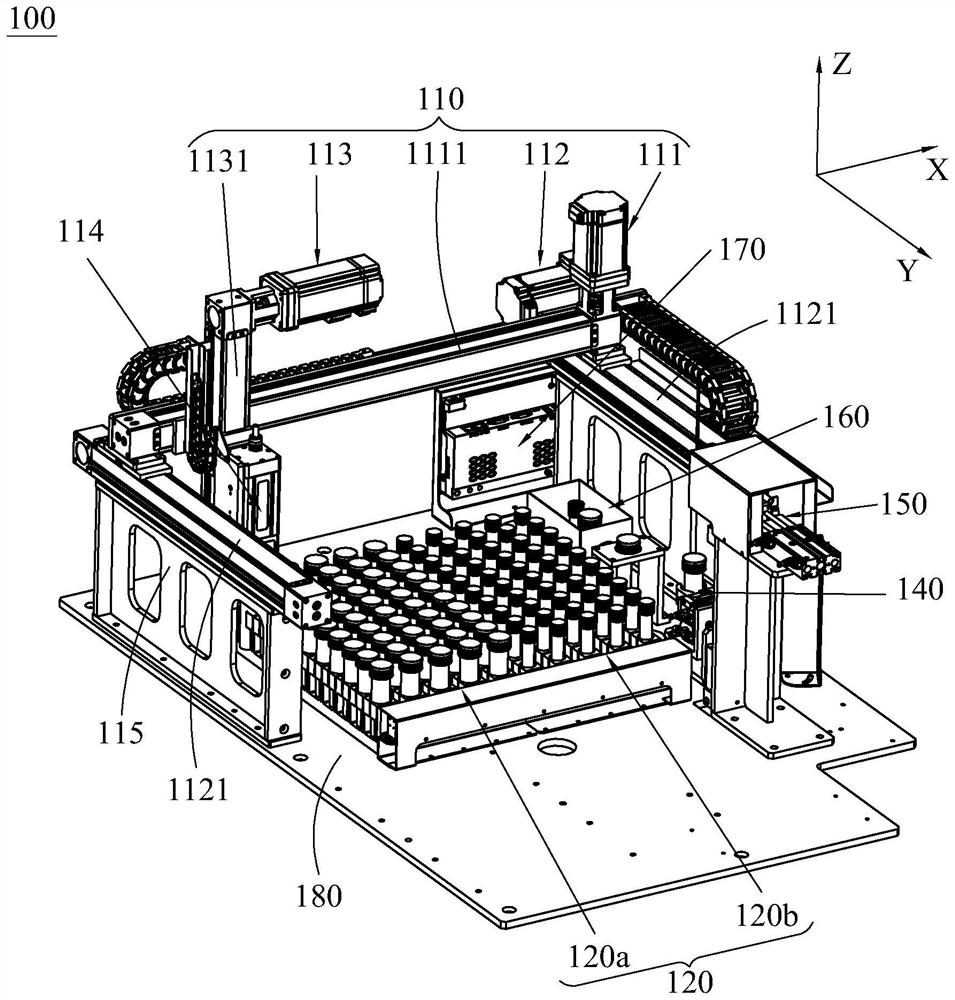
图1是本发明之口咽拭子采集机构的结构示意图。
图2是图1另一角度的结构示意图。
图3是图1中三轴转运开盖单元的结构示意图。
图4是图1中扫码单元、夹持单元、裁剪单元的结构示意图。
图5是图1中扫码单元、夹持单元、裁剪单元的放大示意图。
图6是1中夹持单元另一角度的结构示意图。
图7是图1中裁剪单元另一角度的结构示意图。
图8是本发明之口咽拭子采集方法的流程图。
具体实施方式
现在参考附图描述本发明的实施例,附图中类似的元件标号代表类似的元件。需说明的是,本发明所涉及到的方位描述,例如上、下、左、右、前、后等指示的方位或位置关系均为基于附图所示的方位或位置关系,仅是为了便于描述本申请的技术方案或/和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。所描述到的第一、第二等只是用于区分技术特征,不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
首先结合图1-图7所示,本发明所提供的口咽拭子采集机构100,其包括三轴转运开盖单元110、存放单元120、扫码单元130、夹持单元140、裁剪单元150以及控制器170。其中,存放单元120包括第一存放区120a及第二存放区120b,第一存放区120a用于存放空试管,第二存放区120b用于存放装有采集后的口咽拭子的待测试管。扫码单元130其包括设于存放单元120的一侧的扫描仪131,扫描仪131用于扫描试管上的二维码。夹持单元140设于存放单元120的一侧并包括定位夹爪141,定位夹爪141用于夹持固定试管并可打开。裁剪单元150包括设于夹持单元140上方的气动剪刀151,气动剪刀151用于裁剪采集后的口咽拭子,以使裁剪后的口咽拭子可掉入由定位夹爪141夹持固定的空试管内。三轴转运开盖单元110包括三轴驱动模组及连接于该三轴驱动模组的夹持开盖夹爪114,三轴驱动模组驱动夹持开盖夹爪114沿X轴、Y轴、Z轴移动,以将空试管由第一存放区120a转运至夹持单元140以及将待测试管由夹持单元140转运至第二存放区120b。控制器170分别与所述三轴转运开盖单元110、扫码单元130、夹持单元140、裁剪单元150电连接,用于控制前述各部件工作。
本发明中,所述三轴驱动模组可以是三轴机械手,但并不以此为限,其还可以采用其他驱动机构。
下面继续参看图1-2所示,在本发明的一种实施方式中,口咽拭子采集机构100还包括一安装底板180,前述三轴转运开盖单元110、存放单元120、扫码单元130、夹持单元140、裁剪单元150均安装于所述安装底板180上,且三轴转运开盖单元110围绕存放单元120设置。另外,夹持单元140设于存放单元120和三轴转运开盖单元110的一个Y轴导轨1121(详见后述)之间,并且夹持单元140设于远离三轴转运开盖单元110的X轴导轨1111(详见后述)的一端,参看图1-2所示。扫码单元130、裁剪单元150分别围绕夹持单元140设置,更具体地,两者均设于夹持单元140的外侧,且两者均设于夹持单元140的上方,以便能够对夹持单元140上方的空试管进行扫描,并能对夹持单元140夹持固定的空试管上方的口咽拭子进行裁剪。本发明的这种结构设置,不仅使得口咽拭子采集机构100的结构紧凑,占用空间小,还使得扫码、试管固定以及口咽拭子的裁剪集中完成,使三轴转运开盖单元110的移动距离减少,有利于简化控制以及提高采集效率。
下面结合图1-图2、图4所示,在本发明中,第一存放区120a可存放多个第一试管架121,第二存放区120b可存放多个第二试管架122,两者的数量不作具体限定,且第一试管架121、第二试管架122的结构相同,只是为了便于后续描述而采用第一、第二对两者进行区分。更具体地,第一试管架121、第二试管架122均呈长方体形状,两者上均设有多个用于容纳试管的容置孔,并且第一试管架121、第二试管架122上所设置的容置孔的数量相同,容置孔有利于试管的固定存放。
需说明的是,图1-2中仅是示意性的表示出第一存放区120a和第二存放区120b,两者的位置可互换,也可以是其他设置方式,并不以图1-2中的为限。
参看图1-2所示,在本发明的一种具体实施方式中,第一试管架121、第二试管架122均沿Y轴方向延伸摆放,三轴转运开盖单元110带动夹持开盖夹爪114沿Y轴方向逐一移动以抓取空试管以及放置待测试管,详见后述。
下面结合图1-2、图4-6所示,本发明的一种实施方式中,所述夹持单元140还包括底座143及安装于该底座143的第一驱动器142,第一驱动器142与定位夹爪141相连接,并且该第一驱动器142还与控制器170电连接,该第一驱动器142用于驱动定位夹爪141打开或闭合。更优选地,底座143上对应于定位夹爪141的位置还设有与空试管200相对应的定位槽1431,当空试管200放置于底座143上时,通过定位槽1431对空试管200进行定位,实现空试管200的精准放置,然后由第一驱动器142驱动定位夹爪141闭合以实现空试管200的固定,使空试管200保持竖直,有利于口咽拭子的装入,详见后述。
下面结合图1-2、图4-5所示,在本发明的一种实施方式中,所述扫码单元130设于夹持单元140的X轴方向的外侧,且扫码单元130设于三轴转运开盖单元110的一个Y轴导轨1121的端部和裁剪单元150之间。该扫码单元130还包括第一支架132,第一支架132固定于安装底板180,扫描仪131安装于第一支架132并高于定位夹爪141的位置,并且扫描仪131正对于夹持单元140的方向设置,该扫描仪131电连接于控制器170,通过控制器170控制扫描仪131工作。当空试管200被转运至定位夹爪141的上方后,通过扫描仪131对试管200上的二维码进行扫描。
下面结合图1-2、图4-5、图7所示,本发明的一种实施方式中,所述裁剪单元150设于夹持单元140的远离三轴转运开盖单元110的一侧。该裁剪单元150还包括第二支架153以及第二驱动器152,第二驱动器152安装于第二支架153的顶部并连接于气动剪刀151,使气动剪刀151位于定位夹爪141的上方,同时该第二驱动器152还与控制器170电连接。该第二驱动器152用于驱动气动剪刀151沿Y轴方向水平移动,以使气动剪刀151于定位夹爪141上方的第一位置以及远离定位夹爪141的第二位置之间移动。当气动剪刀151移动到第二位置时,对定位夹爪141上方的位置进行避让,以使三轴转运开盖单元110的夹持开盖夹爪114可以移动至定位夹爪141的上方,并将空试管200放置于夹持单元140。而当六关节机器人把采集后的口咽拭子300移送至空试管200的上方后,第二驱动器152驱动气动剪刀151移动至第一位置,此时气动剪刀151动作可将采集后的口咽拭子300剪断,从而使剪断后的口咽拭子300能够掉入空试管200内。
更优选地,所述裁剪单元150还包括一壳体154,该壳体154安装于第二支架153的顶部并罩设于气动剪刀151之外,并且气动剪刀151可在壳体154内移动,通过壳体154对对气动剪刀151进行保护。
在本发明中,所述第一驱动器142、第二驱动器152均优选为气缸,但并不以此为限,两者当然还可以选用其他驱动机构。
下面参看图1-图3所示,在本发明中,所述三轴驱动模组包括X轴驱动模组111、Y轴驱动模组112以及Z轴驱动模组113,夹持开盖夹爪114安装于Z轴驱动模组113,且X轴驱动模组111、Y轴驱动模组112、Z轴驱动模组113分别与控制器170电连接。通过控制器170控制X轴驱动模组111、Y轴驱动模组112、Z轴驱动模组113的运行,带动夹持开盖夹爪114分别沿X轴、Y轴、Z轴移动,从而实现空试管以及待测试管的转运。
更具体地,Z轴驱动模组113具有一Z轴导轨1131,夹持开盖夹爪114可移动地安装于Z轴导轨1131,当Z轴驱动模组113运行时驱动夹持开盖夹爪114沿Z轴导轨1131上下移动。对应地,所述X轴驱动模组111具有一X轴导轨1111,Z轴驱动模组113可移动地连接于X轴导轨1111,X轴驱动模组111运行时可驱动Z轴驱动模组113以及夹持开盖夹爪114同步沿X轴移动。本发明中,Y轴驱动模组112具有两个Y轴导轨1121,两个Y轴导轨1121分别通过支架115安装于存放单元120的两侧且相平行设置,X轴驱动模组111的两端可移动地安装于两Y轴导轨1121上,当Y轴驱动模组112运行时,驱动X轴驱动模组111沿两Y轴导轨1121移动,从而带动Z轴驱动模组113以及夹持开盖夹爪114同步沿Y轴移动。
参看图3所示,所述夹持开盖夹爪114包括旋转驱动器1141及与之连接的夹爪1142,旋转驱动器1141用于驱动夹爪1142旋转,通过夹爪1142的旋转带动其上夹持的试管200同步旋转,从而实现对其上的二维码的扫描。
继续参看图1-图3所示,在本发明的一种实施方式中,控制器170分别控制X轴驱动模组111、Y轴驱动模组112、Z轴驱动模组113按照预设的路径和距离移动,即可将空试管200由第一存放区120a转送至夹持单元140以及将待测试管200由夹持单元140转运至第二存放区120b。更具体的是,在抓取空试管200以及放置待测试管200时,根据第一试管架121、第二试管架122上相邻两个容置孔之间的距离来预设单位距离,控制Y轴驱动模组112运行以驱动夹持开盖夹爪114沿Y轴方向每移动一个单位距离,即可使夹持开盖夹爪114逐一抓取空试管200或者逐一放置待测试管200。
相对应地,在X轴方向上,当一个第一试管架121上的空试管200移送完毕或者一个第二试管架122上放满待测试管200之后,控制器170控制X轴驱动模组111运行,以带动夹持开盖夹爪114在X轴方向距离缩短一个单位距离,以对下一个第一试管架121上的空试管200进行移送或者将待测试管放置于下一个第二试管架122上。举例来说,当第一个第一试管架121上的所有空试管200都移送完毕后,控制器170控制X轴驱动模组111沿X轴负向移动时,比初始位置缩短一个单位距离,此时可对第二个第一试管架121上的空试管200进行移送。采用前述方式实现夹持开盖夹爪114的三轴移动,可以使控制方法更简单,进而提高采集效率。
在本发明中,三轴驱动模组的X轴驱动模组111、Y轴驱动模组112、Z轴驱动模组113可以采用直线电机、无杆气缸等,还可以采用电机、丝杆、丝杆螺母的组合结构,或者采用电机、皮带的组合结构等等。但并不以前述结构为限,只要能够带动夹持开盖夹爪114沿直线移动即可。
下面参看图1-图7所示,在本发明的一种优选实施方式中,所述口咽拭子采集机构100还进一步包括消毒单元160,消毒单元160设于三轴转运开盖单元110的移动路径上,在三轴转运开盖单元110移送待测试管200的过程中,可以将待测试管200放置于消毒单元160进行消毒,然后再将消毒后的待测试管200移送至第二存放区120b存放。更具体地,消毒单元160设于夹持单元140的后侧并与之正对,也即,裁剪单元150、夹持单元140、消毒单元160沿Y轴依次设置,三者沿一条直线设在,以减少移动位移,便于控制。
参看图4-图5所示,消毒单元160包括箱体161、设于箱体161内的定位座162、设于箱体161上的喷头163,其中,喷头163与消毒液连接,定位座162上设有与试管相对应的定位槽。当三轴转运开盖单元110将待测试管200从夹持单元140转运至箱体161上方,并将待测试管200放置于定位槽内之后,控制器170控制喷头163喷洒消毒液以对待测试管200进行消毒。消毒完成之后,控制器170再次控制三轴转运开盖单元110运行,以将消毒后的待测试管200转运至第二存放区120b的第二试管架122上存放。
下面再次结合图1-图7所示,对本发明之口咽拭子采集机构100的工作原理及工作过程进行说明。
如图1-2所示,在正式开始采样之前,在存放单元120的第一存放区120a放置多个第一试管架121,每个第一试管架121均沿Y轴延伸,且每个第一试管架121上均放满空试管200。相对应地,在第二存放区120b放置多个第二试管架122,每个第二试管架122也都沿Y轴延伸,且每个第二试管架122均空置。
另外,根据不同的试管型号或者检测需求,单支试管所需要容纳的口咽拭子数量不同,例如,单支试管可以容纳十只口咽拭子,即十混一的检测方式,也可以容纳二十只口咽拭子,即二十混一的检测方式,当然还可以容纳其他数量的口咽拭子,根据具体的检测需要灵活选择。在每次采样开始之前,通过人工设置的方式,对本次采样的检测方式进行设置,也即,设置单只试管所需容纳的口咽拭子的数量。当完成该次采样之后,下一次采样之前可重新设置单只试管所需容纳的口咽拭子数量。
当口咽拭子采集机构100开始工作时,控制器170先控制三轴转运开盖单元110运行以复位,即,使Z轴驱动模组113处于坐标系的原点位置,使夹持开盖夹爪114位于第一个第一试管架121的第一个定位槽的上方。当然,也可以在每次采样完成之后,控制器170就控制三轴转运开盖单元110运行复位,以便于下一次采样时可直接运行。
采样时,控制器170控制三轴转运开盖单元110运行以将空试管200转运至扫码单元130。具体地,控制Z轴驱动模组113运行使其带动夹持开盖夹爪114沿Z轴负向向下移动预设距离,使夹持开盖夹爪114夹持一空试管200,然后控制器170再控制Z轴驱动模组113带动夹持开盖夹爪114沿Z轴正向向上移动预设距离,实现第一个空试管200的抓取。接着,控制器170控制X轴驱动模组111运行,以其驱动Z轴驱动模组113沿X轴正向移动到端部,此过程中,带动Z轴驱动模组113上安装的夹持开盖夹爪114同步移动。然后,控制器170再控制Y轴驱动模组112运行,以驱动X轴驱动模组111沿Y轴正向移动至端部,此过程中,X轴驱动模组111带动安装于其上的Z轴驱动模组113、夹持开盖夹爪114同步移动,由此将空试管200移送至对应于扫描仪131的位置。
然后进行扫码。具体地,控制器170控制夹持开盖夹爪114的旋转驱动器1141运行,旋转驱动器1141带动夹爪1142旋转,从而带动由夹爪1142夹持的空试管200的转动,从而使扫描仪131能够对空试管200上的二维码进行扫描。
扫码完成后,控制器170再控制Z轴驱动模组113运行以驱动夹持开盖夹爪114沿Z轴负向向下移动预设距离,将空试管200放置于夹持单元140的底座143上的定位槽1431内。接着,控制器再控制第一驱动器142运行,使第一驱动器142驱动定位夹爪141闭合,从而将空试管200夹持固定。然后,控制夹持开盖夹爪114松开空试管200,再由Y轴驱动模组112运行并驱动X轴驱动模组111回退一定距离,从而使Z轴驱动模组113、夹持开盖夹爪114回退一定距离,避开空试管200的上方位置。
当口咽拭子300采集完成后,由六关节机器人把采集后的口咽拭子300移送到定位夹爪141的上方,并且,口咽拭子300与空试管200中心对齐,如图4-5所示。然后,控制器170控制裁剪单元150的第二驱动器152运行,使第二驱动器152驱动气动剪刀151移动到第一位置,再控制气动剪刀151对采集后的口咽拭子300进行裁剪,使口咽拭子300掉入空试管200内存放。控制气动剪刀151重复动作直至完成预设数量的口咽拭子300的裁剪,即,完成单只试管200的采集数量,得到待测试管200。然后,第二驱动器152驱动气动剪刀151退回至第二位置,以避让定位夹爪141的上方位置。
接着进行待测试管200的转运。即,控制器170控制Y轴驱动模组112再次运行,以驱动X轴驱动模组111以及安装于其上的Z轴驱动模组113、夹持开盖夹爪114同步沿Y轴正向移动一定距离,使夹持开盖夹爪114再次移动到待测试管200上方,然后控制夹持开盖夹爪114夹持待测试管200。接着,控制第一驱动器142运行,使第一驱动器142驱动定位夹爪141打开。然后,控制器再次控制Z轴驱动模组113运行,以驱动夹持开盖夹爪114沿Z轴正向向上移动预设距离,抓取夹持单元140上的待测试管200。再控制Y轴驱动模组112运行,以驱动X轴驱动模组111沿Y轴负向移动至端部,使得Z轴驱动模组113、夹持开盖夹爪114同步移动到Y轴的端部。然后,再控制X轴驱动模组111运行,以驱动Z轴驱动模组113沿X轴负向移动至第二存放区120b的对应位置,以将待测试管200放置于第二试管支架122上。
在上述三轴转运开盖单元110移送待测试管200的过程中,还可以进一步对待测试管200进行消毒。具体地,在Y轴驱动模组111运行,以驱动X轴驱动模组111沿Y轴负向移动过程中,当到达消毒单元160所在位置时,控制器170控制Y轴驱动模组111停止,然后控制Z轴驱动模组113运行以驱动夹持开盖夹爪114下移,将其上的待测试管200放置于消毒单元160的定位座162上,再控制夹持开盖夹爪114松开待测试管200。接着,控制器170控制喷头163喷洒消毒液以对待测试管200进行消毒。消毒完成之后,控制器170再次控制夹持开盖夹爪114夹持待测试管200,然后控制Z轴驱动模组113运行以驱动夹持开盖夹爪114上移,将消毒后的待测试管200移出箱体161,然后按照上述方法将待测试管200转运至第二存放区120b的第二试管架122上存放。
重复上述步骤,当第一个第一试管架121上的空试管200都转运完毕后,控制器170控制X轴驱动模组111再次运行以驱动Z轴驱动模组113沿X轴负向返回时,相对于初始距离缩短一个单位距离,也就是驱动Z轴驱动模组113返回至距离坐标原点一个单位距离的位置,使夹持开盖夹爪114对应于第二个第一试管架121,以能够抓取该第二个第一试管架121上的空试管200。以此类推,重复上述步骤直至完成一批次的空试管200移送。
相对应地,当一个第二试管架122上放满待测试管200之后,需要移动至下一个第二试管架122上存放,控制器170控制X轴驱动模组111驱动Z轴驱动模组113沿X轴负向移动的方式与抓取空试管的方式相同,也即,X轴驱动模组111驱动Z轴驱动模组113沿X轴负向移动的距离,相对于初始距离缩短一个单位距离,使夹持开盖夹爪114对应于第二个第二试管架122。重复上述步骤直至完成一批次的口咽拭子300采集。
下面参看图8所示,本发明还提供一种使用如上所述的口咽拭子采集机构100的口咽拭子采集方法,其包括如下步骤:
S01、获取预设的单只试管的口咽拭子数量;
具体地,根据不同的试管型号或者检测需求,单支试管所需要容纳的口咽拭子数量不同,例如,单支试管可以容纳十只口咽拭子,即十混一的检测方式,也可以容纳二十只口咽拭子,即二十混一的检测方式,当然还可以容纳其他数量的口咽拭子,根据具体的检测需要灵活选择。在每次采样开始之前,通过人工设置的方式,对本次采样的检测方式进行设置,也即,设置单只试管所需容纳的口咽拭子的数量。当完成该次采样之后,下一次采样之前可重新设置单只试管所需容纳的口咽拭子数量。人工设置完成之后,控制器170获取该次采样中单只试管所需容纳的口咽拭子数量。
S02、控制三轴转运开盖单元运行,将第一存放区的空试管转运至扫码单元;
参看图1-2所示,当口咽拭子采集机构100开始工作时,控制器170先控制三轴转运开盖单元110运行以复位,即,使Z轴驱动模组113处于坐标系的原点位置,使夹持开盖夹爪114位于第一个第一试管架121的第一个定位槽的上方。当然,也可以在每次采样完成之后,控制器170就控制三轴转运开盖单元110运行复位,以便于下一次采样时可直接运行。
具体参看图1-5所示,控制器170先控制Z轴驱动模组113运行使其带动夹持开盖夹爪114沿Z轴负向向下移动预设距离,使夹持开盖夹爪114夹持一空试管200,然后控制器170再控制Z轴驱动模组113带动夹持开盖夹爪114沿Z轴正向向上移动预设距离,实现第一个空试管200的抓取。接着,控制器170控制X轴驱动模组111运行,以其驱动Z轴驱动模组113沿X轴正向移动到端部,此过程中,带动Z轴驱动模组113上安装的夹持开盖夹爪114同步移动。然后,控制器170再控制Y轴驱动模组112运行,以驱动X轴驱动模组111沿Y轴正向移动至端部,此过程中,X轴驱动模组111带动安装于其上的Z轴驱动模组113、夹持开盖夹爪114同步移动,由此将空试管200移送至对应于扫描仪131的位置。
S03、控制三轴转运开盖单元运行以带动其上的空试管旋转,以使扫描仪对空试管上的二维码进行扫描;
参看图4-5所示,控制器170控制夹持开盖夹爪114的旋转驱动器1141运行,旋转驱动器1141带动夹爪1142旋转,从而带动由夹爪1142夹持的空试管200的转动,从而使扫描仪131能够对空试管200上的二维码进行扫描。
S04、控制三轴转运开盖单元运行以将空试管转运至夹持单元,由定位夹爪将空试管夹持固定;
参看图4-6所示,控制器170再次控制Z轴驱动模组113运行以驱动夹持开盖夹爪114沿Z轴负向向下移动预设距离,将空试管200放置于夹持单元140的底座143上的定位槽1431内。接着,控制器再控制第一驱动器142运行,使第一驱动器142驱动定位夹爪141闭合,从而将空试管200夹持固定。然后,控制夹持开盖夹爪114松开空试管200,再由Y轴驱动模组112运行并驱动X轴驱动模组111回退一定距离,从而使Z轴驱动模组113、夹持开盖夹爪114回退一定距离,避开空试管200的上方位置。
S05、控制气动剪刀对定位夹爪上方的采集后的口咽拭子进行裁剪,以使裁剪后的口咽拭子掉入空试管内;
结合图4-5、图7所示,当口咽拭子300采集完成后,由六关节机器人把采集后的口咽拭子300移送到定位夹爪141的上方,并且,口咽拭子300与空试管200中心对齐,如图4-5所示。然后,控制器170控制气动剪刀151对采集后的口咽拭子300进行裁剪,使口咽拭子300掉入空试管200内存放。
S06、判断单只试管的口咽拭子数量是否裁剪完成,若是,则进行步骤S07,若否,则返回步骤S05;
控制气动剪刀151重复裁剪并计算裁剪的数量,直至完成预设数量的口咽拭子300的裁剪,即,完成单只试管200的口咽拭子300采集,从而得到待测试管200。
S07、控制三轴转运开盖单元再次运行,将装有预设数量的口咽拭子数量的待测试管从夹持单元转运至第二存放区,并返回所述步骤S01。
再次结合图1-5所示,控制器170控制Y轴驱动模组112再次运行,以驱动X轴驱动模组111以及安装于其上的Z轴驱动模组113、夹持开盖夹爪114同步沿Y轴正向移动一定距离,使夹持开盖夹爪114再次移动到待测试管200上方,然后控制夹持开盖夹爪114夹持待测试管200。接着,控制第一驱动器142运行,使第一驱动器142驱动定位夹爪141打开。然后,控制器再次控制Z轴驱动模组113运行,以驱动夹持开盖夹爪114沿Z轴正向向上移动预设距离,抓取夹持单元140上的待测试管200。再控制Y轴驱动模组112运行,以驱动X轴驱动模组111沿Y轴负向移动至端部,使得Z轴驱动模组113、夹持开盖夹爪114同步移动到Y轴的端部。然后,再控制X轴驱动模组111运行,以驱动Z轴驱动模组113沿X轴负向移动至第二存放区120b的对应位置,以将待测试管200放置于第二试管支架122上。
在本发明之口咽拭子采集方法的一种实施方式中,所述步骤S04具体包括如下步骤:
S41、控制夹持单元的第一驱动器运行以驱动定位夹爪打开;
参看图6所示,控制器170先控制夹持单元140的第一驱动器142运行,由第一驱动器142驱动定位夹爪141打开。
S42、控制三轴转运开盖单元运行以将夹持开盖夹爪上的空试管防放置于夹持单元的底座上的定位槽内;
具体地,控制器170控制Z轴驱动模组113运行以驱动夹持开盖夹爪114沿Z轴负向向下移动预设距离,将空试管200放置于夹持单元140的底座143上的定位槽1431内,利用定位槽1431对空试管200进行定位。
S43、控制第一驱动器驱动定位夹爪闭合以夹持固定空试管。
然后由控制器170控制第一驱动器142再次运行,使第一驱动器142驱动定位夹爪141闭合,从而将空试管200夹持固定,如图6所示。
S44、控制夹持开盖夹爪松开空试管,并控制三轴转运开盖单元运行以驱动夹持开盖夹爪移离。
具体地,控制器170先控制夹持开盖夹爪114松开空试管200,再控制Y轴驱动模组112运行并驱动X轴驱动模组111回退一定距离,从而带动Z轴驱动模组113、夹持开盖夹爪114同步回退一定距离,夹持开盖夹爪114移离以避开空试管200的上方位置。
在本发明之口咽拭子采集方法的一种实施方式中,所述步骤S06具体包括如下步骤:
S61、控制三轴转运开盖单元运行以将待测试管从夹持单元转运至消毒单元,通过消毒单元对待测试管进行消毒;
具体参看1-4所示,控制器170控制Y轴驱动模组112再次运行,以驱动X轴驱动模组111以及安装于其上的Z轴驱动模组113、夹持开盖夹爪114同步沿Y轴正向移动一定距离,使夹持开盖夹爪114再次移动到待测试管200上方,然后控制夹持开盖夹爪114夹持待测试管200。接着,控制Z轴驱动模组113运行,以驱动夹持开盖夹爪114沿Z轴正向向上移动预设距离,从而抓取待测试管200。然后,再控制Y轴驱动模组111运行,以驱动X轴驱动模组111沿Y轴负向移动过程中,当到达消毒单元160所在位置时,控制器170控制Y轴驱动模组111停止,然后控制Z轴驱动模组113运行以驱动夹持开盖夹爪114下移,将其上的待测试管200放置于消毒单元160的定位座162上,再控制夹持开盖夹爪114松开待测试管200。接着,控制器170控制喷头163喷洒消毒液以对待测试管200进行消毒。
S62、再次控制三轴转运开盖单元运行以将消毒后的待测试管转运至第二存放区。
消毒完成之后,控制器170再次控制夹持开盖夹爪114夹持待测试管200,然后控制控制器170再次控制Z轴驱动模组113运行以驱动夹持开盖夹爪114上移,将消毒后的待测试管200移出箱体161。然后,再控制Y轴驱动模组112继续运行,以驱动X轴驱动模组111沿Y轴负向移动至端部,使得Z轴驱动模组113、夹持开盖夹爪114同步移动到Y轴的端部。最后,再控制X轴驱动模组111运行,以驱动Z轴驱动模组113沿X轴负向移动至第二存放区120b的对应位置,以将待测试管200放置于对应的第二试管支架122上。
综上所述,由于本发明的口咽拭子采集机构100,通过存放单元120、扫码单元130、夹持单元140、裁剪单元150、三轴转运开盖单元110的配合,实现口咽拭子300采集过中试管200的条码扫描、口咽拭子300裁剪、采集样品收集保存的全自动化过程,代替现有技术中人工采集的方式,将医务人员从繁杂的采样工作中解放出来,解决人工采集劳动强度大的问题。
对应地,利用本发明之口咽拭子采集机构100的口咽拭子采集方法,也具有相同的技术效果。
以上所揭露的仅为本发明的优选实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明申请专利范围所作的等同变化,仍属本发明所涵盖的范围。
- 一种自动咽拭子采集系统以及自动咽拭子采集方法
- 咽拭子采集机构及咽拭子采样设备