一种水下机器人布放装置
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及水下机器人领域,尤其涉及一种水下机器人布放装置。
背景技术
自主水下机器人开展水下检测任务,相比有缆遥控水下机器人具有活动范围大、机动性能好、智能化等特点,成为完成水下任务的重要工具。目前,水下机器人的研究已经成为了热点研究领域,水下机器人可以在水下执行检测和搜寻任务,同时还可以进行一些必要的应急处理。
在长距离输水隧洞检测任务中,受体积和质量的限制,自主式水下机器人携带的能源十分有限,对于在隧道中长时间工作的AUV,必须通过支持平台对AUV进行布放和回收,以补充能源、传递信息和维护保障。在复杂的水域中,受水面波浪及水流等因素的影响无法利用水面船或空中进行布放,因此在水下设置布放装置是目前AUV的一个重要研究方向。
发明内容
本发明的目的是为了提供一种水下机器人布放装置,使水下机器人在进入隧洞的过程中由水下布放装置将其带到工作地点定点进行布放,具备活动范围大机动性能好、快速性和安全性等优点。适用于各种水下长距离工作的场合。
为了实现上述目的,本发明提出一种水下机器人布放装置,包括机器人、主体框架、移动机构、控制舱和能源动力系统,其中:
所述机器人,用于完成水下工作;
所述主体框架,承载并夹持所述机器人,并用于提供安装位置及空间;所述主体框架上由头至尾依次设有头托架、顶压架和尾托架;所述头托架托抵在所述机器人头端的底侧;所述顶压架压抵在所述机器人的顶侧;所述尾托架架设在所述机器人尾端的两侧,所述机器人尾端的两侧设有卡置在所述尾托架上的艉部导向架;
所述移动机构,承载所述主体框架并移动至指定位置;所述移动机构置于所述主体框架的底端;
所述控制舱,用于控制整个布放装置的运动及功能;
所述能源动力系统,用于为整个布放装置的运作提供动力。
进一步地,在所述的水下机器人布放装置中,所述移动机构包括底盘横梁和履带式移动轮,所述底盘横梁水平架设在所述主体框架的底部,所述底盘横梁两端对称设有所述履带式移动轮;
所述履带式移动轮包括移动机架、主动轮、从动轮和橡胶履带,所述橡胶履带外侧设有防滑筋,所述橡胶履带内侧设有诱导齿,所述主动轮和从动轮均安装在所述移动机架上,所述主动轮与所述诱导齿啮合,所述从动轮用于支撑所述橡胶履带。
进一步地,在所述的水下机器人布放装置中,还包括液压系统,用于控制头托架和顶压架进行布放作业;
所述头托架和顶压架均包括液压作动器、传动机构和导向夹具,所述液压作动器的底端与所述主体框架活动连接,所述液压作动器的液压输出轴通过所述传动机构与所述导向夹具相接,所述液压系统与所述液压作动器驱动连接;
所述控制舱和液压系统均固定设置在所述主体框架内侧,所述控制舱与所述液压系统控制连接。
进一步地,在所述的水下机器人布放装置中,所述导向夹具,包括弧形轮板和对称设于所述弧形轮板内两侧的定向滑轮。
进一步地,在所述的水下机器人布放装置中,所述头托架的传动机构包括前倾支架、旋转连接件和传动连接件,所述前倾支架呈弯折结构,所述前倾支架的一端与所述导向夹具相接,另一端通过所述传动连接件与所述液压输出轴活动连接,所述前倾支架的弯折处通过所述旋转连接件与所述主体框架活动连接,所述液压作动器的底端与所述主体框架活动连接。
进一步地,在所述的水下机器人布放装置中,所述主体框架的底部设有底板,所述控制舱固定设置在主体框架上,所述液压系统固定设置在所述底板上,且所述头托架中的所述液压作动器的底端与所述底板活动连接。
进一步地,在所述的水下机器人布放装置中,所述顶压架的传动机构包括翻转支架、推拉架杆和翻转连接件,所述翻转支架呈倒钩结构,所述翻转支架钩状的一端与所述导向夹具相接,杆状的另一端通过所述翻转连接件与所述主体框架活动连接,所述液压作动器的底端与所述主体框架活动连接,所述液压输出轴分别连接两个所述推拉架杆,一所述推拉架杆旋转固定在所述主体框架上,另一所述推拉架杆旋转固定在所述翻转支架的中段处。
进一步地,在所述的水下机器人布放装置中,所述主体框架的外侧设有延伸撑杆,一所述推拉架杆和所述顶压架中的所述液压作动器的底端与所述底板活动连接。
进一步地,在所述的水下机器人布放装置中,所述尾托架包括U形滑轨和尾托支撑架,所述U形滑轨固定在多个平行的所述尾托支撑架上,且所述U形滑轨的开口方向与所述机器人的移动方向一致,所述艉部导向架夹卡设置在所述U形滑轨的内侧。
进一步地,在所述的水下机器人布放装置中,所述U形滑轨的弯折处设有U型连接件,用于将所述U形滑轨呈U形连接设置,所述U型连接件一侧设有空心板件,用于将所述U形滑轨呈U形加固构建。
与现有技术相比,本发明的有益效果主要体现在:
1、履带式的移动机构具备活动范围大、机动性能好、快速性和安全性的特点;
2、布放装置的整体结构,充分利用了主体框架的各空间位置,在减轻负重的同时,延长其工作时长,适用于各种水下长距离长时间的工作的场合;
3、压卡顶托的结构中所采用的滑轮与滑轨结合的方式,既能对鱼雷机器人起到一个固定与支撑的作用,又能起到一个导向作用。
附图说明
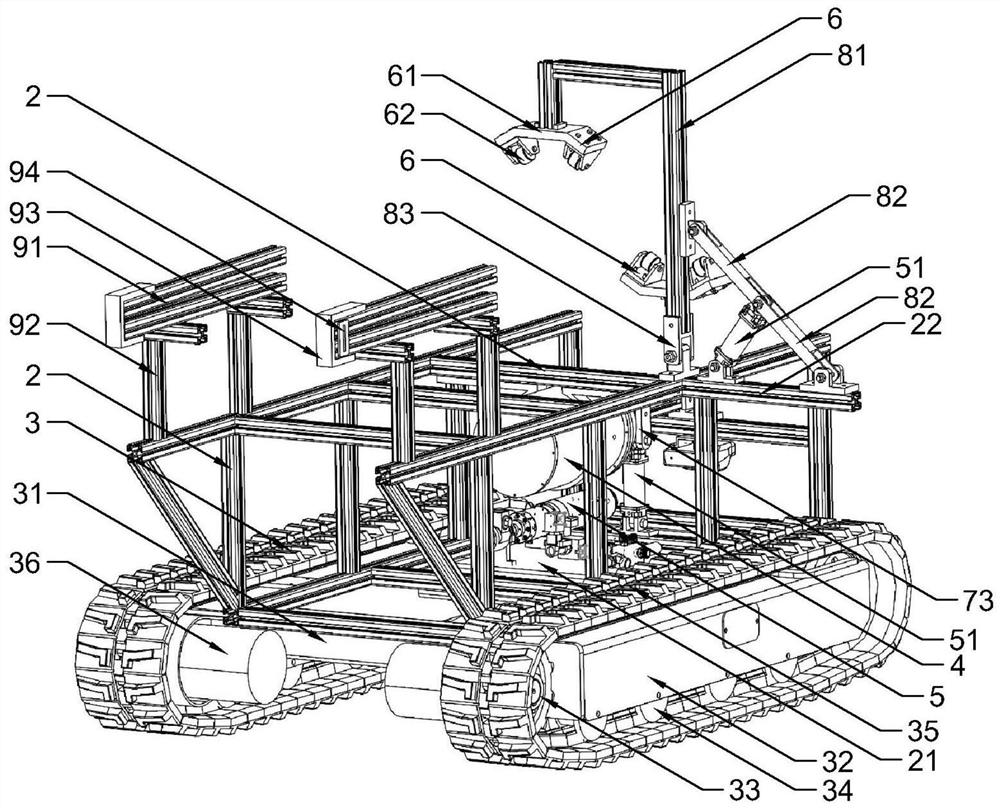
图1为本发明中水下机器人布放装置的结构示意图;
图2为本发明中水下机器人布放装置承载机器人时的结构示意图;
图3为本发明中水下机器人布放装置于机器人夹持时的结构示意图;
图4为本发明中水下机器人布放装置于机器人驶离时的结构示意图。
其中:机器人1、艉部导向架11、主体框架2、底板21、延伸撑杆22、移动机构3、底盘横梁31、移动机架32、主动轮33、从动轮34、橡胶履带35、驱动电机36、控制舱4、液压系统5、液压作动器51、液压输出轴52、导向夹具6、弧形轮板61、定向滑轮62、前倾支架71、旋转连接件72、传动连接件73、翻转支架81、推拉架杆82、翻转连接件83、U形滑轨91、尾托支撑架92、U型连接件93、空心板件94。
具体实施方式
下面将结合示意图对本发明的水下机器人布放装置进行更详细的描述,其中表示了本发明的优选实施例,应该理解本领域技术人员可以修改在此描述的本发明,而仍然实现本发明的有利效果。因此,下列描述应当被理解为对于本领域技术人员的广泛知道,而并不作为对本发明的限制。
在本发明的描述中,需要说明的是,对于方位词,如有术语“中心”,“横向”、“纵向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,不能理解为限制本发明的具体保护范围。
在本发明中,除另有明确规定和限定,如有术语“组装”、“相连”、“连接”术语应作广义去理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;也可以是机械连接;可以是直接相连,也可以是通过中间媒介相连,可以是两个元件内部相连通。对于本领域普通技术人员而言,可以根据具体情况理解上述的术语在本发明中的具体含义。
在下列段落中参照附图以举例方式更具体地描述本发明。根据下面说明,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
如图2至图4所示,本发明提出一种水下机器人布放装置,包括机器人1、主体框架2、移动机构3、控制舱4、能源动力系统和液压系统5,其中:
机器人1,用于完成水下工作,且机器人1为鱼雷形机器人;
主体框架2,承载并夹持机器人1,并用于为其他结构提供安装位置及空间;
移动机构3,承载主体框架2并移动至指定位置;
控制舱4,用于控制整个布放装置的运动及功能;
能源动力系统,用于为整个布放装置的运作提供动力;
液压系统5,用于控制头托架和顶压架进行布放作业。
具体地,如图1至图2所示,主体框架2上由头至尾依次设有头托架、顶压架和尾托架;头托架托抵在机器人1头端的底侧;顶压架压抵在机器人1的顶侧;尾托架架设在机器人1尾端的两侧,机器人1尾端的两侧设有卡置在尾托架上的艉部导向架11。
具体地,如图1至图2所示,移动机构3包括底盘横梁31和履带式移动轮,且移动机构3置于主体框架2的底端;多个底盘横梁31水平架设在主体框架2的底部,即底盘横梁31与主体框架2螺钉固定连接,底盘横梁31两端对称设有履带式移动轮。
其中,履带式移动轮包括移动机架32、主动轮33、从动轮34和橡胶履带35,橡胶履带35外侧设有防滑筋,以提高履带与地面的附着性,橡胶履带35内侧设有诱导齿,用于规正橡胶履带35,主动轮33和从动轮34均安装在移动机架32上,主动轮33与诱导齿啮合,从动轮34用于支撑橡胶履带35。
能源动力系统包括驱动电机,控制舱4与驱动电机36电连接,驱动电机控制主动轮32运转,配合的从动轮33带动履带34运作。
进一步地,如图1至图2所示,主体框架2的底部设有固定在底盘横梁31上的底板21,控制舱4固定设置在主体框架2上,液压系统5固定设置在底板21上,控制舱4与液压系统5控制连接。同时,由于头托架和顶压架均包括液压作动器51、传动机构和导向夹具6,液压系统5与液压作动器51驱动连接,通过控制液压输出轴52的伸缩,经过传动机构翻转控制导向夹具6的位置,以对机器人1进行夹持紧固或松托导向动作。
具体地,如图1至图2所示,头托架包括液压作动器51、传动机构和导向夹具6,且液压作动器51的底端与主体框架2底部的底板21活动连接,液压作动器51的液压输出轴52通过传动机构与导向夹具6相接。其中,头托架的传动机构包括前倾支架71、旋转连接件72和传动连接件73,前倾支架71呈L形弯折结构,旋转连接件72锁紧固定在主体框架2前端的横梁中心处。前倾支架71的一端固定在导向夹具6底侧,另一端通过传动连接件73与液压输出轴52活动连接,前倾支架71的弯折处通过旋转连接件72与主体框架2活动连接。
如图4所示,当头托架处的液压作动器51的液压输出轴52伸展输出时,推动前倾支架71绕旋转连接件72向前转动,使前倾支架71带动导向夹具6于竖直位置处向前倾移,以调整机器人1头端的位置,便于机器人1的脱出驶离。
如图3所示,当头托架处的液压作动器51的液压输出轴52收缩输入时,收拉前倾支架71绕旋转连接件72向后转动,使前倾支架71带动导向夹具6于前倾位置处向后撑立,以调整机器人1头端的位置,便于机器人1的夹持紧固。
具体地,如图1至图2所示,顶压架包括液压作动器51、传动机构和导向夹具6,且液压作动器51的底端与主体框架2外侧的延伸撑杆22活动连接,液压作动器51的液压输出轴52通过传动机构与导向夹具6相接。其中,顶压架的传动机构包括翻转支架81、推拉架杆82和翻转连接件83,主体框架2的外侧设有水平的延伸撑杆22,翻转连接件83锁紧固定在主体框架2侧端的纵梁中段处。翻转支架81呈倒钩结构,翻转支架81钩状的一端固定在导向夹具6的顶侧,杆状的另一端通过翻转连接件83与主体框架2活动连接,液压作动器51的底端与延伸撑杆22的内侧端活动连接,液压输出轴52分别连接两个推拉架杆82,一推拉架杆82与延伸撑杆22的外侧端活动连接,另一推拉架杆82与翻转支架81的中段处活动连接,且延伸撑杆22、液压作动器51、翻转支架81和推拉架杆82在同一平面上。
如图4所示,当顶压架处的液压作动器51的液压输出轴52伸展输出时,向延伸撑杆22外侧推动推拉架杆82,翻转支架81顺着推拉架杆82的拉扯绕翻转连接件83向外侧转动,使翻转支架81带动导向夹具6向外侧松移,导向夹具6远离机器人1顶侧,以松开对机器人1顶侧的压卡动作,便于机器人1的脱出驶离。
如图3所示,当顶压架处的液压作动器51的液压输出轴52收缩输入时,向延伸撑杆22内侧拉扯推拉架杆82,翻转支架81顺着推拉架杆82的推力绕翻转连接件83向内侧转动,使翻转支架81带动导向夹具6向内侧压移,导向夹具6压卡机器人1顶侧,以夹紧对机器人1顶侧的压卡动作,便于机器人1的夹持紧固。
进一步地,液压输出轴52的端部呈扁平圆环状,推拉架杆82呈H形,液压输出轴52的端部与推拉架杆82配合通过螺栓活动连接。
进一步地,导向夹具6,包括弧形轮板61和对称设于弧形轮板61内两侧的定向滑轮62,定向滑轮62通过螺丝固定在弧形轮板61倾斜伸出的短肋板上,使两个定向滑轮62相对向内侧倾斜,保证定向滑轮62的轮面与机器人1紧密接触,便于机器人1通过定向滑轮62进行滑移。
同时,如图1至图2所示,尾托架包括U形滑轨91和L形尾托支撑架92,U形滑轨91固定在多个平行的尾托支撑架92上,且U形滑轨91的开口方向与机器人1的移动方向一致,艉部导向架11夹卡设置在U形滑轨91的内侧,在支撑鱼雷形机器人1的同时,起到导向的作用。
具体地,如图1至图2所示,U形滑轨91的弯折处设有U型连接件93,用于将U形滑轨91呈U形连接设置,即U形滑轨91是由两个滑杆通过U型连接件93呈U形紧固连接而成。U型连接件93一侧设有空心板件94,用于将U形滑轨91呈U形加固构建。空心板件94通过其中间的空心位置,利用螺丝将两个滑杆紧固连接,加强U形滑轨91的牢固性。
其具体的工作原理如下:
如图3至图4所示,当履带式移动轮带动机器人1行驶到指定位置时,鱼雷形水下机器人1会渐渐驶离布放装置,尾部两侧的艉部导向架11会沿着主体框架2双侧的U形滑轨91滑动,与此同时,液压系统5控制两个液压作动器51同时工作,使其推出液压输出轴52,顶压架的传动机构在液压作动器51的推动下向外侧翻转松移,此时顶压架呈打开状态;头托架的传动机构在液压作动器51的推动下向前倾移。鱼雷形机器人1的主体则会沿着上下两个导向夹具6的定向滑轮62方向,逐渐向前滑动,直到驶离布放装置。
综上,在本实施例中,提出的水下机器人布放装置,具有以下优点:
1、履带式的移动机构具备活动范围大、机动性能好、快速性和安全性的特点;
2、布放装置的整体结构,充分利用了主体框架的各空间位置,在减轻负重的同时,延长其工作时长,适用于各种水下长距离长时间的工作的场合;
3、压卡顶托的结构中所采用的滑轮与滑轨结合的方式,既能对鱼雷机器人起到一个固定与支撑的作用,又能起到一个导向作用。
上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
- 一种自主水下机器人布放回收单点起吊止荡保护装置
- 一种深海软体机器人布放平台装置及方法
- 一种水下机器人回收装置
- 一种应用于水下机器人的滑索式可折叠布放装置及其布放方法
- 一种应用于水下机器人的滑索式可折叠布放装置及其布放方法