一种具有自动调平功能的高空作业平台
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及高空作业平台领域,特别涉及一种具有自动调平功能的高空作业平台。
背景技术
针对现有技术的不足,本发明提供了一种具有自动调平功能的高空作业平台,通过电瓶输电,单轴倾角传感器检测工作斗运行角度,倾斜角度超出设定值后输出信号控制继电器触发动作并推动电动推杆伸出或缩回动作,从而实现工作斗可自动调平的功能,使工作斗始终保持与水平面平行的状态下工作,可以有效解决背景技术中的问题。
为实现上述目的,本发明采取的技术方案为:一种具有自动调平功能的高空作业平台,包括调节支架、托架与工作平台,所述托架与工作平台上安装有电气控制箱,所述托架与工作平台之间进行连接,所述调节支架调节托架的位置从而调节工作平台的位置,所述托架内部电性安装用于供电的电瓶及其支架,所述调节支架设置有两组,且两组调节支架定位在工作臂的前端位置。
作为本申请一种优选的技术方案,所述电气控制箱包括电瓶开关、电源开关、单轴倾角传感器、推杆回缩控制继电器K2、推杆伸出控制继电器K3、电动推杆、主电源控制继电器K1、平台旋转开关、逆转控制继电器K4、顺转控制继电器、平台旋转电机、逆限位开关、顺限位开关、电池电量显示器与电瓶,所述电瓶连接电瓶开关、电池电量显示器、主电源控制继电器K1、推杆回缩控制继电器K2与电源开关的位置,所述推杆回缩控制继电器K2、推杆伸出控制继电器K3连接电动推杆的位置,且推杆回缩控制继电器K2连接单轴倾角传感器与推杆伸出控制继电器K3,所述平台旋转开关通过逆限位开关与顺限位开关分别连接逆转控制继电器K4与顺转控制继电器,所述逆转控制继电器K4与顺转控制继电器均连接平台旋转电机。
作为本申请一种优选的技术方案,所述调节支架与托架之间连接安装有固定支架与摆动支架,且固定支架安装在调节支架上,所述摆动支架安装在托架上,所述固定支架与摆动支架之间活动连接有电动推杆,所述电驱回转支撑与工作平台之间定位有旋转支架。
作为本申请一种优选的技术方案,所述工作平台的底部定位安装有高度距离检测传感器,所述高度距离检测传感器连接工作平台的位置定位安装有传感器支座。
作为本申请一种优选的技术方案,所述调节支架与工作臂的位置进行安装并通过工作臂带动进行活动,所述托架、电驱回转支撑对工作平台的位置进行调节,且由电瓶及其支架驱动。
作为本申请一种优选的技术方案,所述电气控制箱的内部通过电瓶进行电源驱动,所述推杆回缩控制继电器K2、推杆伸出控制继电器K3控制电动推杆的位置活动,所述单轴倾角传感器检测工作平台运行角度,所述主电源控制继电器K1对推杆回缩控制继电器K2与推杆伸出控制继电器K3进行整体控制,所述平台旋转开关对逆转控制继电器K4与顺转控制继电器进行整体控制,所述逆转控制继电器K4与顺转控制继电器控制平台旋转电机的位置。
作为本申请一种优选的技术方案,所述调节支架通过固定支架、电动推杆和摆动支架与托架的位置进行连接,所述电动推杆控制固定支架与摆动支架之间的活动位置,所述电驱回转支撑与旋转支架控制工作平台的位置。
作为本申请一种优选的技术方案,所述高度距离检测传感器通过传感器支座定位安装在工作平台的底部位置。
与现有技术相比,本发明提供了一种具有自动调平功能的高空作业平台,具备以下有益效果:该一种具有自动调平功能的高空作业平台,通过电瓶输电,单轴倾角传感器检测工作斗运行角度,倾斜角度超出设定值后输出信号控制继电器触发动作并推动电动推杆伸出或缩回动作,从而实现工作斗可自动调平的功能,使工作斗始终保持与水平面平行的状态下工作,采用安装在平台上的单轴倾角传感器,实现工作斗的角度运行检测,采用安装在平台上的控制继电器,通过触发继电器实现电动推杆伸出或缩回的动作,采用安装在平台上的电动推杆,控制工作斗的前进或后退动作,通过推动平台旋转开关动作,控制继电器推动工作斗顺时针或逆时针转动,结构紧凑,控制和操作简单,反应灵敏,无静液调平的延后性,易于推广,整个高空作业平台结构简单,操作方便,使用的效果相对于传统方式更好。
附图说明
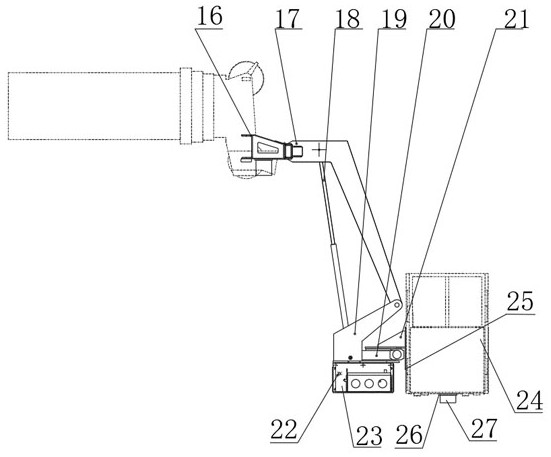
图1为本发明一种具有自动调平功能的高空作业平台的整体结构示意图。
图2为本发明一种具有自动调平功能的高空作业平台中俯视图的结构示意图。
图3为本发明一种具有自动调平功能的高空作业平台中电气控制箱的结构示意图。
图中:1、电瓶开关;2、电源开关;3、单轴倾角传感器;4、推杆回缩控制继电器K2;5、推杆伸出控制继电器K3;6、电动推杆;7、主电源控制继电器K1;8、平台旋转开关;9、逆转控制继电器K4;10、顺转控制继电器;11、平台旋转电机;12、逆限位开关;13、顺限位开关;14、电池电量显示器;15、电瓶;16、调节支架;17、固定支架;18、电动推杆;19、摆动支架;20、电驱回转支撑;21、旋转支架;22、托架;23、电瓶及其支架;24、工作平台;25、电气控制箱;26、传感器支座;27、高度距离检测传感器。
具体实施方式
下面将结合附图和具体实施方式对本发明的技术方案进行清楚、完整地描述。
如图1-3所示,一种具有自动调平功能的高空作业平台,包括调节支架16、托架22与工作平台24,托架22与工作平台24上安装有电气控制箱25,托架22与工作平台24之间进行连接,调节支架16调节托架22的位置从而调节工作平台24的位置,托架22内部电性安装用于供电的电瓶及其支架23,调节支架16设置有两组,且两组调节支架16定位在工作臂的前端位置,通过电瓶输电,单轴倾角传感器检测工作斗运行角度,倾斜角度超出设定值后输出信号控制继电器触发动作并推动电动推杆伸出或缩回动作,从而实现工作斗可自动调平的功能,使工作斗始终保持与水平面平行的状态下工作。
所述电气控制箱25包括电瓶开关1、电源开关2、单轴倾角传感器3、推杆回缩控制继电器K24、推杆伸出控制继电器K35、电动推杆6、主电源控制继电器K17、平台旋转开关8、逆转控制继电器K49、顺转控制继电器10、平台旋转电机11、逆限位开关12、顺限位开关13、电池电量显示器14与电瓶15,电瓶15连接电瓶开关1、电池电量显示器14、主电源控制继电器K17、推杆回缩控制继电器K24与电源开关2的位置,推杆回缩控制继电器K24、推杆伸出控制继电器K35连接电动推杆6的位置,且推杆回缩控制继电器K24连接单轴倾角传感器3与推杆伸出控制继电器K35,平台旋转开关8通过逆限位开关12与顺限位开关13分别连接逆转控制继电器K49与顺转控制继电器10,逆转控制继电器K49与顺转控制继电器10均连接平台旋转电机11。
所述调节支架16与托架22之间连接安装有固定支架17与摆动支架19,且固定支架17安装在调节支架16上,摆动支架19安装在托架22上,固定支架17与摆动支架19之间活动连接有电动推杆18,电驱回转支撑20与工作平台24之间定位有旋转支架21。
所述工作平台24的底部定位安装有高度距离检测传感器27,高度距离检测传感器27连接工作平台24的位置定位安装有传感器支座26。
所述调节支架16与工作臂的位置进行安装并通过工作臂带动进行活动,托架22、电驱回转支撑20对工作平台24的位置进行调节,且由电瓶及其支架23驱动。
所述电气控制箱25的内部通过电瓶15进行电源驱动,推杆回缩控制继电器K24、推杆伸出控制继电器K35控制电动推杆6的位置活动,单轴倾角传感器3检测工作平台24运行角度,主电源控制继电器K17对推杆回缩控制继电器K24与推杆伸出控制继电器K35进行整体控制,平台旋转开关8对逆转控制继电器K49与顺转控制继电器10进行整体控制,逆转控制继电器K49与顺转控制继电器10控制平台旋转电机11的位置。
所述调节支架16通过固定支架17、电动推杆18和摆动支架19与托架22的位置进行连接,电动推杆18控制固定支架17与摆动支架19之间的活动位置,电驱回转支撑20与旋转支架21控制工作平台24的位置。
所述高度距离检测传感器27通过传感器支座26定位安装在工作平台24的底部位置。
一种具有自动调平功能的高空作业平台控制系统,在工作平台上安装组合电瓶用于控制系统供电,底部调平支架上安装角度传感器模块用于检测平台运行角度,通过角度传感器模块发生倾斜后输出信号控制继电器触发动作,推动电动推杆执行伸出或缩回动作,从而实现工作斗平台自动调平的功能。
所述组合电瓶,通过电瓶连接线串接两个大容量的蓄电池,达成升压目的,并配上专用的电瓶桩头,用于自动调平控制系统供电。
所述角度传感器模块,角度传感器模块安装在调平支架上,初始状态下,其与工作斗平行,工作斗运行过程中角度传感器模块检测的角度随之发生变化,工作斗向前方倾斜的同时角度传感器模块检测到角度同步向前方倾斜,倾斜角度达到所设定的触发值时,角度传感器模块输出一个正方向信号,同理,工作斗向后方倾斜的同时角度传感器模块检测到角度同步向后方倾斜,待倾斜角度达到所设定的触发值时,角度传感器模块输出一个反方向信号。
所述角度传感器模块输出端与控制继电器输入端连接,用于控制电动推杆动作,角度传感器模块输出信号后触发继电器的线圈得电,其常开触点闭合,常闭触点断开,从而控制电动推杆动作。
所述控制继电器输出端与电动推杆连接,控制继电器输出端动作时,电动推杆内的伸缩杆执行伸出或缩回动作。
所述工作斗上的手动自动切换开关,使用三位置自锁拨动开关控制,向上拨动开关可与手动调平开关连接,此时,可手动控制工作斗向前或向后动作,向下拨动开关时触发调平自动控制继电器的线圈得电,其常开触点闭合,此时控制继电器输入端即线圈可通过角度传感器模块控制。
所述工作斗上的平台旋转开关,使用三位置自复位拨动开关控制,向上拨动开关动作时,工作斗逆转信号接通后触发逆转控制继电器线圈得电,其触点换向动作,逆转控制继电器输出端与平台旋转电机连接,实现工作斗逆向旋转,向下拨动开关动作时,工作斗顺转信号触发顺转控制继电器线圈得电,其触点换向动作,顺转控制继电器输出端与平台旋转电机连接,实现工作斗顺向旋转。
工作原理:本发明包括电瓶开关1、电源开关2、单轴倾角传感器3、推杆回缩控制继电器K24、推杆伸出控制继电器K35、电动推杆6、主电源控制继电器K17、平台旋转开关8、逆转控制继电器K49、顺转控制继电器10、平台旋转电机11、逆限位开关12、顺限位开关13、电池电量显示器14、电瓶15、调节支架16、固定支架17、电动推杆18、摆动支架19、电驱回转支撑20、旋转支架21、托架22、电瓶及其支架23、工作平台24、电气控制箱25、传感器支座26、高度距离检测传感器27,通过电瓶输电,单轴倾角传感器检测工作斗运行角度,倾斜角度超出设定值后输出信号控制继电器触发动作并推动电动推杆伸出或缩回动作,从而实现工作斗可自动调平的功能,使工作斗始终保持与水平面平行的状态下工作,打开电瓶开关1,电瓶15持续供电,电池电量显示器14实时显示电瓶电量状态,再打开电源开关2,工作斗运行过程中通过单轴倾角传感器3检测其倾斜角度状态,若工作斗向前端倾斜时,通过单轴倾角传感器3检测工作斗倾斜角度达到设定值时输出正角度信号,同时触发K2线圈得电,推杆回缩控制继电器4常开触点闭合,常闭触点断开,此时,电动推杆得电执行回缩动作并推动工作斗向后端移动,当单轴倾角传感器3检测工作斗倾斜角度小于设定值时输出正角度信号断开,同时K2线圈失电,推杆回缩控制继电器4的常开常闭触点复位,此时,电动推杆6停止回缩动作。若工作斗向后端倾斜时,通过单轴倾角传感器3检测工作斗倾斜角度达到设定值时输出负角度信号,同时触发K3线圈得电,推杆伸出控制继电器5的常开触点闭合,常闭触点断开,此时电动推杆6得电执行伸出动作并推动工作斗向前端移动,当单轴倾角传感器3检测到工作斗倾斜角度小于设定值时输出负角度信号断开,同时K3线圈失电,推杆伸出控制继电器5的常开常闭触点复位,此时,电动推杆6停止伸出动作,若工作斗运行中再次倾斜,按此工作原理继续触发继电器,实现工作斗运行中始终达到与水平面保持平衡的状态。
向上拨动平台旋转开关8,逆转控制继电器9的线圈得电,其常开触点闭合,常闭触点断开,此时平台旋转电机得电带动工作斗向逆时针方向旋转,工作斗旋转过程中触碰限位开关12,此时限位开关常闭触点断开,逆转继电器9的线圈失电,其常开常闭触点复位,平台旋转电机11失电后停止转动同时工作斗停止向逆时针方向转动,这时,工作斗只能向反方向即顺时针方向转动,向下拨动旋转开关8,顺转控制继电器10的线圈得电,其常开触点闭合,常闭触点断开,此时平台电机得电带动工作斗顺时针方向旋转,限位开关12常闭触点复位,工作斗旋转过程中触碰限位开关13,此时限位开关13常闭触点断开,顺转继电器10的线圈失电,其常开常闭触点复位,平台旋转电机11失电后停止转动同时工作斗停止向顺时针方向转动,这时,工作斗只能向反方向即逆时针方向转动,如此反复循环,实现工作斗正反两个方向运动。
将整套结构通过两个调节支架16固定在工作臂的前侧,固定支架17固定在两调节支架16之间,使用螺栓固定放置其晃动。固定支架17,电动推杆17,摆动支架19三者之间使用铰轴连接,电驱回转支撑20使用螺栓固定在摆动支架19上侧,旋转支架21固定在电驱动回转支撑20上侧,托架22固定在摆动支架19下侧,和摆动支架19同时摆动,电瓶及其支架23安装在托架22内,可简便的拆除进行充电和维护。高空作业平台24通过侧面法兰与旋转支架21连接固定。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
- 高空作业平台的调平控制系统、调平控制方法及高空作业平台
- 一种具有自动调平功能的冰箱
- 具有自动调平功能的高空作业平台
- 一种高空作业车工作平台自动调平液压系统