一种三维激光测量装置及方法
文献发布时间:2023-06-19 18:32:25
技术领域
本发明属于激光跟踪测量技术领域,具体涉及一种三维激光测量装置及方法。
背景技术
激光跟踪测量是在被测目标上安置一个反射器,将激光测量仪器发出的激光射到反射器上,然后激光又返回到激光测量仪器,返回激光为激光测量仪器所接收,用来测算目标的空间位置。目前大尺寸构件在拼装、生产过程中,由于有些目标被遮挡导致激光测量仪器无法捕捉反射器位置,从而无法进行激光跟踪测量。同时由于产品结构复杂、场地空间限制、固定工装和操作平台对产品特征的遮挡等因素,导致在生产过程中无法有效全面地对关键尺寸进行三维扫描测量,也就难以全面对关键尺寸进行生产指导与过程把控。
发明内容
本发明的目的在于提供一种能够测量被遮挡目标物的三维激光测量装置及方法。
基于上述目的,本发明采用如下技术方案:
一种三维激光测量装置,包括三维激光测量仪器,还包括激光接收机构;激光接收机构包括测量杆,还包括与测量杆的两端分别可拆卸连接的固定接收器和固定夹具;激光接收机构还包括与测量杆可拆卸连接的固定器和移动接收器。
进一步的,测量杆包括主测量标杆,还包括与主测量标杆可拆卸连接的标靶杆;主测量标杆与固定夹具连接的一端设置有万向球头旋转机构;标靶杆与固定接收器连接的一端设置有标靶通用转接座。
进一步的,固定器包括在测量杆上可拆卸连接的快速固定夹,还包括与快速固定夹连接的万向磁力座。
进一步的,固定接收器包括靶球和棱镜,移动接收器包括方位球。
进一步的,固定夹具上设置有快速锁紧机构。
上述三维激光测量装置的方法,包括以下步骤:
步骤1,组装激光接收机构;
步骤2,将激光接收机构与被测目标和遮挡物固连;
步骤3,使用三维激光测量仪器测量固定接收器和移动接收器的坐标,然后计算被测目标的坐标。
进一步的,在步骤3中,计算被测目标的坐标的方法为:根据固定接收器和移动接收器的坐标计算测量杆的方向,然后根据靶球和固定夹具之间的的距离计算固定夹具与被测目标的坐标。
进一步的,在步骤1中,组装机构接收机构的方法为:根据遮挡物和被测目标的距离选取标靶杆,将标靶杆与主测量标杆连接成一个测量杆;根据被测目标的形状选取固定夹具,将固定夹具连接到万向球头旋转机构上;然后将快速固定夹与移动接收器套设在测量杆上,使快速固定夹位于固定夹具和移动接收器之间。
进一步的,在步骤2中,将激光接收机构与被测目标和遮挡物固连的方法为:将固定夹具夹持在被测目标上,然后转动测量杆,移动快速固定夹并将万向磁力座吸附在遮挡物上,将快速固定夹与测量杆固连;然后调整移动接收器在测量杆上的位置,最后将固定接收器连接到标靶通用转接座上。
与现有技术相比,本发明具有如下有益效果:
1、本发明将方位球、靶球和固定夹具连接在测量杆上,通过三点一线的几何原理,靶球的空间坐标加上方位球的空间坐标,两点连线并延长即可确定固定夹具夹持的固定点坐标,又因产品的被测点与夹具夹持点的相对位置是确定的唯一值,所以间接地就可求算出产品被测目标的坐标,从而完成测量工作,无需直接测量被测目标,避免了遮挡物对测量的影响。
2、本发明将固定夹具与测量杆可拆卸连接,可设置多种固定夹具,根据不同形状的被测目标选用不同的固定夹具,使固定夹具与被测目标连接的更加稳定。
3、本发明将标靶杆与主测量标杆可拆卸连接,可设置不同长度的标靶杆,使用标靶杆与主测量标杆组成不同长度的测量杆,使测量杆的长度大于遮挡物和被测目标之间的距离,使靶球和方位球不被遮挡物遮挡,方便测量工作稳定进行。
4、本发明将方位球与测量杆活动连接,方便调整方位球的位置,进而方便对方位球与靶球的坐标进行测量。将快速固定夹与测量杆活动连接,方便调整快速固定夹与万向磁力座的位置,使万向磁力座能够就近吸附在遮挡物上的合适位置,从而方便将测量杆与被测目标固定连接。通过标靶通用转接座,可以固定多种靶球或棱镜装置,可适应市面上多种扫描测量仪器。
附图说明
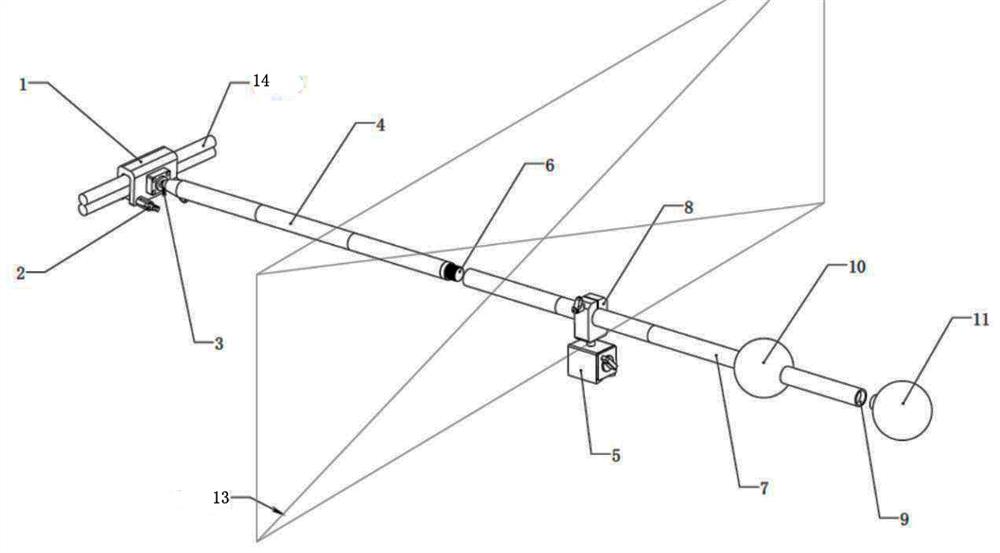
图1为本发明实施例1的示意图。
图中:固定夹具1、快速锁紧机构2、万向球头旋转机构3、主测量标杆4、万向磁力座5、延长接头6、标靶杆7、快速固定夹8、标靶通用转接座9、方位球10、靶球11、被测目标12、遮挡物13。
具体实施方式
实施例1
一种三维激光测量装置,包括三维激光测量仪器,还包括激光接收机构;激光接收机构包括测量杆,还包括与测量杆的两端分别可拆卸连接的固定接收器和固定夹具1;激光接收机构还包括与测量杆可拆卸连接的固定器和移动接收器。固定接收器和移动接收器均用于反射激光,使三维激光测量仪器测量出固定接收器和移动接收器的坐标。
固定夹具1可设置为各种形状,被测目标12可以是圆棒、方板等任意形状,通过更换各种固定夹具1,即可适应不同被测目标12,方便固定夹具1对被测目标12稳定夹持。固定夹具1上设置有快速锁紧机构2。固定夹具1包括一对目标夹板,一对目标夹板上开设有对称且同轴的通孔,快速锁紧机构2由可旋转的螺栓和在螺栓尾端螺接的蝶形防松螺帽等组成,螺栓设置在通孔中,目标夹板在螺栓头端和尾端之间;固定夹具1卡到位后,手动拧紧蝶形防松螺帽,使目标夹板与被测目标12紧固连接。
测量杆包括主测量标杆4,还包括与主测量标杆4可拆卸连接的标靶杆7,主测量标杆4与标靶杆7连接的一端设置有延长接头6,主测量标杆4通过延长接头6与标靶杆7连接;主测量标杆4远离标靶杆7的一端与固定夹具1为万向转动连接,主测量标杆4与固定夹具1连接的一端设置有万向球头旋转机构3;标靶杆7远离主测量标杆4的一端与固定接收器连接,标靶杆7与固定接收器连接的一端设置有标靶通用转接座9,固定接收器包括靶球11和棱镜,标靶通用转接座9用于和靶球11或棱镜连接。
固定器包括在测量杆的标靶杆7上可拆卸连接的快速固定夹8,本实施例中标靶杆7和主测量标杆4均为圆柱状结构,快速固定夹8包括一对杆夹板,两个杆夹板上均开设有与标靶杆7和主测量标杆4配合的弧形槽,两个弧形槽对称设置,弧形槽的半径和标靶杆7、主测量标杆4相等,两个杆夹板底端固连有底座,两个杆夹板顶端开设有对称且同轴的通孔,这两个通孔中设置有螺栓,螺栓尾端螺接有螺帽,杆夹板在螺栓的头端和尾端之间拧紧螺栓即可将杆夹板固定到测量杆上。固定器还包括与快速固定夹8连接的万向磁力座5,万向磁力座5可与快速固定夹8的底座固连或者转动连接。移动接收器包括方位球10。
实施例2
一种利用实施例1中三维激光测量装置的方法,包括以下步骤:
步骤1,组装激光接收机构;根据遮挡物13和被测目标12的距离选取标靶杆7,将标靶杆7与主测量标杆4连接成一个测量杆;根据被测目标12的形状选取固定夹具1,将固定夹具1连接到万向球头旋转机构3上;然后将快速固定夹8与方位球10套设在测量杆上,使快速固定夹8位于固定夹具1和方位球10之间。
步骤2,将激光接收机构与被测目标12和遮挡物13固连;将固定夹具1卡在被测目标12上,固定夹具1卡到位后,手动拧紧蝶形防松螺帽,使目标夹板与被测目标12紧固连接。然后转动测量杆,通过万向球头旋转机构3,调整测量杆到合适的角度,移动快速固定夹8与万向磁力座5,打开万向磁力座5的开关将万向磁力座5吸附在遮挡物13上,万向磁力座5吸附牢固后,再手动拧紧快速固定夹8上的螺栓,将快速固定夹8与测量杆固连;然后沿着测量杆长度方向调整方位球10在测量杆上的位置,避免与遮挡物13发生干涉,最后将靶球11连接到标靶通用转接座9上。
步骤3,使用三维激光测量仪器测量靶球11和方位球10的坐标,然后计算被测目标12的坐标:通过三点一线的几何原理,靶球11的空间坐标加上方位球10的空间坐标,两点连线并延长即可确定夹固定具夹持的固定点坐标。根据靶球11和方位球10的坐标计算测量杆的方向,然后根据靶球11和固定夹具1之间的的距离计算固定夹具1的坐标;又因被测目标12与固定夹具1夹持点的相对位置是确定的唯一值,所以间接地就可求算出被测目标12的坐标,从而完成测量工作。
- 一种半接触式弧面三维尺寸测量装置及其测量方法
- 一种激光器光束质量因子M2的测量方法及其测量装置
- 一种三维激光扫描系统进行产品翼面结构水平测量的方法
- 基于三维激光雷达辅助定位的转炉炉腔三维测量方法及测量装置
- 基于三维激光雷达辅助定位的转炉炉腔三维测量方法及测量装置