车辆制动装置及其控制方法
文献发布时间:2023-06-19 18:32:25
相关申请的交叉引用
本申请要求于2021年7月21日提交的韩国专利申请第10-2021-0095454号的优先权,其全部公开内容通过引用合并于此。
技术领域
本公开涉及一种汽车制动系统与控制该汽车制动系统的方法。更详细地,本公开涉及一种控制液压发生器的残余压力的汽车控制系统及其控制方法。
背景技术
该部分中的描述仅提供本公开的背景信息,并未构成相关技术。
在具有液压发生器的汽车制动系统中,即使车轮制动器不需要制动压力,在某些情况下,残余压力仍然保留在车轮制动器中。
例如,在电子稳定控制(Electric Stability Control,ESC)集成制动系统中,车轮制动器的制动压力是基于驱动液压发生器的发动机的转速确定的。当施加到制动踏板的踏板压力变化等导致的车轮制动所需的制动压力改变时,发动机驱动液压发生器,使得车轮制动器的制动压力与所需的制动压力相同。当发动机的转速高于临界转速时,流向车轮制动器的工作流体的每单位时间的体积可以大于液压发生器中腔室的随单位时间增加的体积。在这种情况下,工作流体可以从贮存器流入腔室。因此,在车轮制动器处可以产生残余压力。
为了去除在车轮制动器处产生的残余压力,当所需的制动压力小于施加到车轮制动器的压力时,相关技术的汽车制动系统通过将液压发生器的活塞返回到初始位置,控制返回的活塞以维持活塞的位移,并且开启与车轮制动器和贮存器连通的通道中的阀门来去除车轮制动器处的残余压力。
图1为示出了通过相关技术的控制车辆的制动器的系统和方法实施残余压力控制时所需的压力和通道压力的图。
参见图1,根据相关技术的制动系统,当通过活塞的位置和流体的流动而改变的车轮制动器的制动压力等于或小于所需压力时,难以使车轮制动器的制动压力与所需压力相同。此外,当活塞的直线速度超过预定速度时,可能存在活塞通过撞击主缸的一端而产生噪音并被损坏(如果很严重)的问题。
发明内容
根据至少一个实施例,本公开提供了一种控制车辆的制动器的方法,所述制动器包括:贮存工作流体的贮存器,与所述贮存器连接的主缸,被配置为从所述主缸提供液压的车轮制动器,与所述贮存器和所述车轮制动器连通的残余压力控制液压管路,安装在所述残余压力控制液压管路中的控制阀,接收对于所述车轮制动器所需的制动压力的输入单元,以及控制所述控制阀的开度的控制器;所述方法包括:通过控制器确定通过车轮制动器的液压确定的通道压力与所需的制动压力之间的压力差的步骤;当所述通道压力大于所需的制动压力时,通过控制器开启所述控制阀的步骤;以及基于所需的制动压力与所述通道压力之间的差值来控制所述控制阀的步骤。
根据至少一个实施例,本公开提供了一种用于控制车辆的制动器的系统,所述系统包括:贮存工作流体的贮存器;与所述贮存器连接的主缸;被配置为从所述主缸提供液压的车轮制动器;与所述贮存器和所述车轮制动器连通的残余压力控制液压管路;安装在所述残余压力控制液压管路中的控制阀;接收对于所述车轮制动器所需的制动压力的输入单元;以及控制所述控制阀的开度的控制器,其中,所述控制器确定通过所述车轮制动器的液压确定的通道压力与所需的制动压力之间的压力差,当所述通道压力大于所需的制动压力时,开启所述控制阀,并且在开启所述控制阀的步骤之后,基于所需的制动压力与所述通道压力之间的差值来控制所述控制阀。
附图说明
图1为示出了通过相关技术的控制车辆的制动器的系统和方法实施残余压力控制时所需的压力和通道压力随时间的变化的图。
图2为示出了根据本公开的实施例的用于控制车辆的制动器的系统的液压回路图上的布置的液压回路图。
图3为示出了根据本公开的实施例的用于控制车辆的制动器的系统的配置的框图。
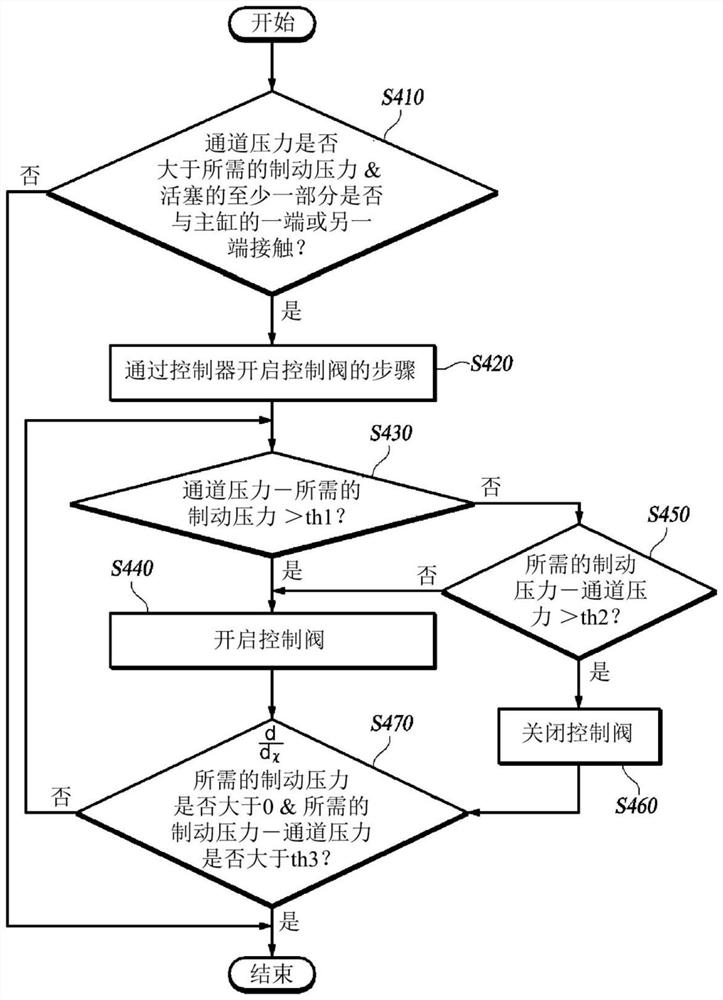
图4为示出了根据本公开的实施例的控制车辆的制动器的方法的流程图。
图5为示出了根据本公开的另一个实施例的控制车辆的制动器的方法的流程图。
图6为示出了通过根据本公开的实施例的控制车辆的制动器的系统和方法实施残余压力控制时所需的压力和通道压力随时间的变化的图。
具体实施方式
因此,根据本公开的实施例的控制车辆的制动器的方法已被提出以解决上述问题,并且能够通过由控制器开启/关闭安装在与制动器和贮存器相连的通道中的控制阀来保持车轮制动器的制动压力与所需压力相同,而无论所需压力与车轮制动器的制动压力的大小关系如何。
此外,根据本公开的实施例的控制车辆的制动器的方法能够降低活塞撞击主缸的一端产生的噪音,并且通过根据发动机的每分钟转数(revolutions per minute,RPM)调整活塞的控制位置来防止对活塞的损坏。
本公开的目的并不限于上述目的,并且本领域技术人员将从以下描述清楚地理解其它目的。
在下文中,将参照附图详细描述本公开的一些实施例。在以下的描述中,相同的附图标记优选地指示相同的元件,尽管该元件在不同的附图中示出。此外,在一些实施例的以下描述中,为了清楚和简洁的目的,当考虑到模糊本公开的主题时,将省略相关的已知组件与功能的详细描述。
此外,编号组件中的字母数字编码,如第一、第二、i)、ii)、(a)、(b)等,仅仅用于区分一个组件与另一个组件,而不是暗指或暗示组件的物质、顺序或序列。在整个说明书中,当部件“包括”或“包含”一个组件时,它们旨在还包括其它组件,不排除其它组件,除非有与之相反的具体描述。如“单元”、“模块”等术语是指用于处理至少一种功能或操作的一个或多个单元,其可以通过硬件、软件或其组合来实施。
参见图2,根据本公开的实施例的一种用于控制车辆的制动器的系统包括以下中一些或全部:贮存工作流体的贮存器210,与贮存器210连接的主缸220,被配置为从主缸220提供液压的车轮制动器230,连接至贮存器210和车轮制动器230的残余压力控制液压管路241,设置或安装在液压管路241中的控制阀251,接收对于车轮制动器230所需的制动压力的输入单元260,以及控制控制阀251的开度的控制器300。
贮存器210贮存工作流体并且与安装在车轮处的车轮制动器230的汽缸流体连通,因此贮存在贮存器210中的流体被传输至车轮制动器230或工作流体从车轮制动器230返回。贮存器210可以通过主缸220、多个阀门等间接地与车轮制动器230连接。通常,在没有施加电流时关闭的出口阀OV和在没有施加电流时开启的入口阀IV设置在每个车轮制动器230处。当车轮制动器230被加压时,工作流体从贮存器210通过入口阀IV传输至车轮制动器230,因此车轮制动器230的制动压力增加。当车轮制动器230被减压时,工作流体的液压从车轮制动器230通过出口阀OV传输至贮存器210,因此车轮制动器230的制动压力减小。
主缸220基于由制动踏板等输入的制动请求信号来产生用于将工作流体传输至车轮制动器230的液压。能够识别驾驶员操作踏板的意图和踏板的冲程量的踏板模拟器可以产生该制动请求信号。
根据本公开的实施例,发动机224安装在主缸220的纵向侧。发动机224的扭矩可以用于通过主轴226和固定至主轴226的固定螺母228在主缸220中直线移动活塞223,主轴226耦合至发动机224的轴并且随着发动机224一起旋转。活塞223在主缸220的通道229中产生液压,同时在主缸220中直线移动。
与至少一个车轮制动器230连接的排放口225和227形成于主缸220处。排放口225和227通过通道连接至车轮制动器230的汽缸。上述入口阀IV可以安装在连接排放口225和227与主缸220的通道中。形成于主缸220中并且由活塞223隔开的两个腔室229的体积通过活塞223的移动而改变。随着每个腔室229的体积改变,每个腔室229中的液压增加或减小。
根据本公开的实施例的主缸220的活塞223被配置为:当活塞230向前和向后移动时能够在车轮制动器230处产生液压。也就是说,活塞223被配置为:当朝向发动机224移动时和当远离发动机224移动时都将液压传输至车轮制动器230。例如,连接至车轮制动器230的两个排放口225和227可以形成在主缸220的两端处。在下文中,将发动机224处的排放口225、227称为第一排放口225,将另一个排放口225、227称为第二排放口227。
用于防止工作流体从主缸220回流到贮存器210的止回阀254可以安装在与主缸220和贮存器210连通的通道中。
车轮制动器230通过从主缸220提供液压来限制车轮盘的旋转。在本公开中,由工作流体的压力驱动的车轮制动器230可以是卡钳式制动器、鼓式制动器等。车轮制动器230通过出口阀OV连接至贮存器210并且通过入口阀IV连接至主缸220。与形成在主缸220处的两个排放口225和227连接的液压回路可以形成,使得从排放口225和227分开排放的工作流体分别制动两个车轮。
如图2所示的用于控制车辆的制动器的系统为同时控制左前轮FL和右前轮FR并且同时控制左后轮RL和右后轮RR的H分体式(H-split type),但本发明并不一定限于此,并且用于分配液压的结构可以在设计上自由改变。在下文中,将连接第一排放口225、左后轮和右后轮的通道称为第一液压管路243。在下文中,将连接第二排放口227、左前轮和右前轮的通道称为第二液压管路245。在根据本发明的实施例的用于控制车辆的制动器的系统中,在第一液压管路243与第二液压管路245之间安装分配液压的混合阀255。无论活塞223的移动方向如何,都可以通过混合阀255将相同的液压传输至安装在车轮上的多个车轮制动器230。
发动机224响应于制动请求信号而旋转,并且活塞223通过来自发动机224的扭矩在主缸220中产生液压。产生的液压通过液压回路传输至每个车轮制动器230。传输至每个车轮制动器230的制动压力可以通过安装在车轮制动器230处的入口阀IV和出口阀OV来改变。入口阀IV和出口阀OV为电磁阀,并且根据是否施加电流来确定阀门是否开启/关闭。
液压管路241是连接本公开的制动系统的组件的液压回路的一部分。液压回路可以分成若干液压管路241。多个阀门安装在液压回路中。
残余压力控制液压管路241与贮存器210和车轮制动器230连通或连接。术语“连通”包括工作流体流动通过另一组件(如阀门或辅助主缸220)的情况,只要工作流体可以在贮存器210与车轮制动器230之间传输。此外,车轮制动器230,其意思是该车轮制动器230的侧面,包括具有与车轮制动器230的压力相同或大致相同的所有通道。即使开启出口阀OV,也可以使用残余压力控制液压管路241减小剩下的残余压力。此外,可以使得通道比用于通过出口阀OV减小车轮制动器230的压力的通道短,因此可以增加残余压力控制响应速度。
根据本公开的实施例的残余压力控制液压管路241从第一液压管路243依次通过控制阀251、第二阀252和第一阀253而连接至贮存器210,但是本公开的用于控制车辆的制动器的系统不限于此。残余压力控制液压管路241可以以其它方式改变,只要它是连接至贮存器210和车轮制动器230的液压管路241。
控制阀251安装在残余压力控制液压管路241中。控制阀251是否开启/关闭可以基于或根据是否施加电流来确定,并且可以被配置为使得根据施加的电流的量来确定开度。当控制阀251开启时,在车轮制动器230处产生残余压力的工作流体可以通过车轮制动器230传输至贮存器210。与此相反,当控制阀251关闭时,车轮制动器230处的液压不通过残余压力控制液压管路241传输至贮存器210。
参见图2,根据本公开的实施例的用于控制车辆的制动器的系统关闭远离控制阀251设置的第二液压管路245与贮存器210之间的阀门256、257和258,同时通道压力由控制阀251控制。这是为了顺利地将液压传输至残余压力控制管路。
根据本公开的实施例的用于控制车辆的制动器的系统可以在控制车轮制动器230的残余压力的同时开启和关闭控制阀251。与相关技术中的在控制残余压力的同时仅开启控制阀251的用于控制车辆的制动器的系统相比,可以更精确地控制残余压力。
根据本公开的实施例的控制阀251可以在控制阀251的残余压力被控制的同时调节控制阀251的开度。因此,与现有技术中的在控制残余压力的同时仅开启控制阀251的用于控制车辆的制动器的系统相比,可以更精确地控制残余压力。
参见图2和3,输入单元260产生对于车轮制动器230所需的制动压力。输入单元260可以是能够识别驾驶员操作制动器的意图(即所需的制动压力)的踏板模拟器。所需的制动压力可以表示为电信号,但本公开不限于此,并且所需的制动压力可以是由增加驾驶员的踏板压力的增压器(booster)产生的液压。在另一个实施例中,所需的制动压力可以是由包括在自动驾驶车辆(autonomous vehicle)中的至少一个模块计算的值,并且该所需的制动压力的种类不限于本公开的实施例。输入单元将产生的所需的制动压力传输至控制器。
控制器300从输入单元260接收所需的制动压力。控制器300控制控制阀251的开度。该开度不仅包括阀门的开启/关闭比例,还包括是否开启或关闭阀门。控制器300,其意思是功能性地控制阀门的装置,并不限于与本公开的汽车制动系统的其它组件物理分离的部件。此外,控制器300可以是安装在电子稳定控制(ESC)模块中的电子控制单元。
控制器300确定通过车轮制动器230的液压确定的通道压力与所需的制动压力之间的压力差。当通道压力大于所需的制动压力时,控制器300开启控制阀251。通道压力为与车轮制动器230的液压大致相同的值或基于车轮制动器230的液压确定的值。根据本公开的另一个实施例的用于控制车辆的制动器的系统包括用于检测通道压力的车轮制动压力检测器270。在下文中,基于所需的制动压力与通道压力之间的差值控制该控制阀251。相关技术的用于控制车辆的制动器的系统在开始残余压力控制并初始开启控制阀251之后,在结束控制时关闭控制阀251,而不调节控制阀251的开度。然而,本公开的用于控制车辆的制动器的系统在控制车轮制动器230的残余压力的同时,能够连续追踪通过车轮制动器230的液压确定的通道压力与所需的制动压力之间的差值。因此,可以不断减小所需的压力与通道压力之间的差值。
具体地,当通道压力大于所需的制动压力时,根据本公开的实施例的控制器300增加控制阀251的开度。当通道压力小于所需的制动压力时,控制器300减小控制阀251的开度。因此,即使通道压力与所需的制动压力之间的大小关系改变,也可以不断减小通道压力与所需的制动压力之间的差值。
当通道压力减去所需的制动压力得到的压力大小符合第一预定条件(例如大于第一临界值)时,根据本公开的实施例的控制器300增加控制阀251的开度,并且当所需的制动压力减去通道压力得到的压力大小符合第二预定条件(例如大于第二临界值)时,该控制器300减小控制阀251的开度。第一临界值或第二临界值可以是考虑阀门的开启/关闭速度等通过实验获得的表值。然而,本公开不限于此,并且包括各种实施例,如通过控制器300通过函数实时计算的值。此外,第一临界值或第二临界值可以是相同的值。
本公开的一种控制车辆的制动器的方法可以通过上述用于控制车辆的制动器的系统来实现。
本公开的一种控制车辆的制动器的方法包括:贮存工作流体的贮存器210,与贮存器210连接的主缸220,被配置为从主缸220提供液压的车轮制动器230,连接至贮存器210和车轮制动器230的残余压力控制液压管路241,安装在残余压力控制液压管路241中的控制阀251,接收对于车轮制动器230所需的制动压力的输入单元260,以及控制控制阀251的开度的控制器300。
参见图4,本公开的控制车辆的制动器的方法包括以下中一些或全部:通过控制器300确定通过车轮制动器230的液压确定的通道压力与所需的制动压力之间的压力差,以及确定主缸220中的活塞223的至少一部分是否与主缸220中的一端或另一端接触的步骤(S410);当通道压力大于所需的制动压力时,通过控制器300开启控制阀251的步骤(S420);将通道压力减去所需的制动压力得到的第一压力的大小与第一临界值的大小进行比较的步骤(S430);当第一压力大于第一临界值时增加控制阀251的开度的步骤(S440);将所需的制动压力减去通道压力得到的第二压力的大小与第二临界值的大小进行比较的步骤(S450);当第二压力大于第二临界值时减小控制阀251的开度的步骤(S460);以及确定随时间增加的所需的制动压力减去通道压力得到的值是否为第三临界值或更大的步骤(S470)。
在步骤S410中,通道压力为与车轮制动器230的压力相同的值,或者为基于车轮制动器230的压力确定的值。当通道压力高于所需的制动压力并且活塞223的至少一部分与主缸220的一端或另一端接触时,控制器300确定在车轮制动器230处产生了残余压力。活塞223的至少一部分与主缸220的一端或另一端接触的事实意味着,当活塞223在面对主缸220的发动机224的横截面处或在相反的横截面处的位移为0时,活塞223的位移为0。
在步骤S420中,当确定产生了残余压力时,控制器300开启控制阀251。控制阀251可以设置在从车轮制动器230连接至贮存器210的液压管路241中。当控制阀251开启时,车轮制动器230的液压被传输至贮存器210并且车轮制动器230的残余压力减小。
参见图2和3,在残余压力控制过程中,工作流体的液压可以从车轮制动器230依次通过控制阀251、第二阀252和第一阀253传输至贮存器210。然而,本公开的用于控制车辆的制动器的系统不限于此。残余压力控制液压管路241可以以其它各种方式实现,只要它是连接至贮存器210和车轮制动器230的液压管路241。
在步骤S420之后,实施了基于所需的制动压力与通道压力之间的差值来控制控制阀251的步骤。通道压力为与车轮制动器230的压力相同的值,或者为基于车轮制动器230的压力确定的值。在控制残余压力时,相关技术的用于控制车辆的制动器的系统在开始控制并初始开启控制阀251之后,在结束控制时关闭控制阀251,而不调节控制阀251的开度。然而,本公开的用于控制车辆的制动器的系统在控制车轮制动器230的残余压力的同时,能够连续追踪通过车轮制动器230的液压确定的通道压力与所需的制动压力之间的差值。因此,可以不断减小所需的压力与通道压力之间的差值。
例如,根据本公开的实施例的控制车辆的制动器的方法实施步骤S430至步骤S460。在控制器300开启控制阀251之后,当通道压力比所需的制动压力大第一临界值或更大时,通过保持阀门开启来减小残余压力。然而,当所需的制动压力比通道压力大第二临界值或更大时,通过关闭控制阀251来防止工作流体从车轮制动器230传输至贮存器210。第一临界值和第二临界值为0或正值。在下文中,所需的制动压力随时间增加以及确定所需的制动压力减去通道压力得到的值是否为第三临界值或更大(S470),并且,当满足该条件时,结束控制,而当不满足该条件时,该方法返回步骤S430并重复步骤。第三临界值可以是与第二临界值相同的值。
根据本公开的实施例的汽车制动系统包括确定发动机224的每分钟转数(RPM)是否为预定值或更小的步骤(S510),以及通过控制器300控制主缸220的活塞223的位置的步骤(S520)。
根据本公开的实施例的控制活塞223的位置的步骤基于驱动活塞223的发动机224的转速来控制活塞223的位置。发动机224的转速可以替换为显示或可以计算活塞223的直线速度的值,如活塞223的直线速度或施加到发动机224的电流的量。
相关技术的汽车制动系统在控制残余压力时不考虑活塞223的直线移动而控制活塞223定位在主缸220的一端。然而,相关技术中的控制车辆的制动器的方法没有考虑活塞223接近主缸220的一端的速度,因此,当活塞223接近主缸220的一端的速度较高时,存在活塞223产生噪音或通过撞击主缸220而被损坏的问题。然而,当发动机224的速度为预定RPM或更高时,也就是,当活塞223以预定速度或更高速度接近主缸220的一端时,根据本公开的实施例的控制车辆的制动器的方法控制活塞223从当前位置向主缸的中心移动一段预定距离(S523)。因此,防止活塞223在撞击主缸220的内壁时产生噪音或被损坏。此外,当发动机224的RPM为预定值或更小时,控制活塞223停留在当前位置(S521)。
图1为示出了通过相关技术的控制车辆的制动器的系统和方法实施残余压力控制时所需的压力和通道压力随时间的变化的图。
图6为示出了通过根据本公开的实施例的控制车辆的制动器的系统和方法实施残余压力控制时所需的压力和通道压力随时间的变化的图。
比较图1至图6,可以看出,与相关技术的控制车辆的制动器的系统和方法相比,通过本公开的控制车辆的制动器的系统和方法,可以通过将通道压力拟合到所需的压力来实施更精确的控制。
因此,根据本公开的实施例的控制车辆的制动器的方法已被提出以解决上述问题,并且能够通过由控制器开启/关闭安装在与制动器和贮存器相连的通道中的控制阀来保持车轮制动器的制动压力与所需压力相同,而无论所需压力与车轮制动器的制动压力的大小关系如何。
此外,根据本公开的实施例的控制车辆的制动器的方法能够降低活塞撞击主缸的一端产生的噪音,并且通过根据发动机的RPM调整活塞的控制位置来防止对活塞的损坏。
尽管出于说明性目的描述了本公开的示例性实施例,但是本领域技术人员将理解,在不脱离所要求保护的发明的思想和范围的情况下,可以进行各种修改、增加和替换。因此,为了简洁和清楚,已经描述了本公开的示例性实施例。本实施例的技术思想的范围不受描述的限制。因此,普通技术人员会理解,所要求保护的发明的范围不受上述明确描述的实施例的限制。
- 车辆制动性能检测装置、车辆及车辆的控制方法
- 车辆及单踏板电动汽车的再生制动控制方法和装置
- 车辆控制装置、车辆、车辆控制装置的处理方法以及存储介质
- 车辆控制装置、车辆、车辆控制装置的处理方法以及存储介质
- 用于控制车辆的制动设备的控制装置、车辆的制动设备、用于运行控制装置的方法和用于以制动压力加载车辆的制动设备的至少一个制动装置的方法
- 用于轨道车辆的制动设备的制动控制装置,制动设备,轨道车辆以及用于运行制动控制装置的方法