用于控制液压致动器的设备和方法
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及向诸如车辆(例如挖掘机)或工业机器(例如注射模制机、喷水切割机)的液压机中的液压致动器提供液压流体的泵送流(并且在某些情况下从其接收液压流体)的领域。
背景技术
目前,挖掘机,尤其是履带式挖掘机的液压致动器通常由液压系统控制,有歧管延伸穿过开中心式致动器阀,操作者可使用手动控制接口(如操纵杆)移动这些阀,以将泵所供应的液压流体偏流到歧管中以从歧管流到连接到各种阀的液压致动器。多个歧管都具有其自有的泵和阀。歧管还包括带有相关联的压力传感器的节流孔(控制孔)。液压流体在使用中不断流出控制孔,回到低压侧,而被动控制过程监测该孔处的压力并调节该泵的排量以将测量压力保持在预先确定的值。该控制过程在本领域中称为Negacon。在US20160290370(Doosan)中可找到示例。
液压流体不断穿过控制孔而流失是浪费能源的,可以使用可控度高的可变排量泵来省去这一需求。然而,挖掘机操作者青睐现有的Negacon控制过程。其提供致动器对命令的特征响应,以及对操作者的关于致动器功能的有用反馈,例如,当致动器因碰到障碍物而不移动时,操作者可以感觉到。这部分地是由于到达致动器的流速随歧管压力而变化。Negacon还提供了一些有用的致动器运动阻尼。
已知提供了一种液压控制布置,该布置不包括这种出口,但其中泵排量是变化的,以模拟穿过出口的泄漏情况。这为操作者提供了他们习惯和偏好的控制和反馈。
这种虚拟控制布置可应用于具有两个或多个泵的典型液压布置,每个泵馈送单独的歧管,各种致动器连接到该单独歧管。然而,我们发现,这种布置无法最优地驱动高容量致动器,这些致动器通常在标准液压布置中连接到两个泵并从中接收流体。
本发明寻求提供一种控制使用由泵驱动的至少两个歧管来连接的致动器的改进的方法,该方法在提供对致动器控制命令的期望响应时,并且在一些实施例中,还在对用户提供适当反馈时,保持能量效率,用户是可手动操作控制的典型人类用户,但也可能是机器(例如,在机器人控制的设备中)。
发明内容
根据本发明,提供了一种液压装置,包括:
控制器;
原动机;
液压机,该液压机具有与原动机驱动地接合的可旋转轴,并包括容积随可旋转轴的旋转而周期性变化的多个工作腔室,多组一个或多个工作腔室的净排量在控制器的控制下可独立变化;
多个液压致动器;
在多个工作腔室和多个液压致动器之间延伸的液压回路;
其中,液压回路包括:第一歧管,该第一歧管在第一组所述一个或多个工作腔室和第一组一个或多个致动器之间延伸;第一多个致动器阀,第一多个致动器阀是可控的,以调节从第一组一个或多个工作腔室到第一组一个或多个致动器的液压流体的流速;第二歧管,该第二歧管在不同的第二组所述一个或多个工作腔室和第二组一个或多个致动器之间延伸;第二多个致动器阀,第二多个致动器阀是可控的,以调节从第二组一个或多个工作腔室到第二组一个或多个致动器的液压流体的流动;
并且其中,一个或多个工作腔室可通过一个或多个联动阀在作为第一组的部分并连接到第一歧管和作为第二组的部分并连接到第二歧管之间切换;
其中,从第一组工作腔室和第二组工作腔室进入或离开第一歧管和第二歧管的液压流体的流速通过在控制器的控制下的第一组一个或多个工作腔室和第二组一个或多个工作腔室的独立控制而独立可变(即,可以为每个歧管独立受控),并且其中第一歧管和第二歧管中的压力由此可以独立变化;
第一多个致动器阀和第二多个致动器阀具有可响应于命令受控的多个位置,以由此调节从第一歧管和第二歧管到致动器的流体的流速;
其中,控制器独立控制第一组一个或多个工作腔室和第二组一个或多个工作腔室的净排量,以响应于命令分别独立改变到达或离开第一歧管和第二歧管的流速,从而由此调节致动器对命令的响应。
本发明还扩展到控制液压设备的方法,该方法包括控制第一组工作腔室和第二组工作腔室的净排量,以响应通过接口的命令而独立改变进入或离开第一歧管和第二歧管(分别离开或到达第一组一个或多个工作腔室和第二组一个或多个工作腔室)的流动。
所控制的第一多个致动器阀和第二多个致动器阀的位置通常是(流体流动穿过的导管的)打开横截面积。当阀打开时,相应打开横截面积增大,当阀关闭时,相应打开横截面积减小。
因此,致动器对命令的响应由第一多个致动器阀和第二多个致动器阀的位置、分别进入或离开第一歧管和第二歧管的液压流体的流速以及分别对第一歧管和第二歧管的输入压力确定。流速又分别由第一组工作腔室或第二组工作工作的净排量决定,其可以由容积方面表示,或者例如,作为可旋转轴每次旋转的最大排量的分数,其需要乘以可旋转轴每次旋转的最大容积排量和可旋转轴的旋转速度,以得出容积方面的流速。可通过替换比供应给(或接收自)致动器的流体更多或更少的流体来增加或减少输入压力。
除了控制第一组一个或多个工作腔室和第二组一个或多个工作腔室的净排量,控制器还可以控制第一多个致动器阀和第二多个致动器阀的位置,例如响应于命令。第一多个致动器阀和第二多个致动器阀可通过控制器以外的方式进行控制,例如借助来自诸如用户可操作的控制件的输入件的命令(例如先导压力)。
通常,控制器构造成通过操作一个或多个联动阀来将一个或多个工作腔室从连接到一个歧管切换到连接到(第一歧管和第二歧管的)另一歧管。一个或多个联动阀的切换分别响应于到第一组一个或多个致动器和第二组一个或多个致动器的流体流量需求。因此,控制器可以,例如响应于第二组一个或多个致动器的需求的增加,或第一组一个或多个致动器的需求的减少,或第二组一个或多个致动器的需求与第一组一个或多个致动器的需求的比率的增加,而将一个或多个工作腔室从连接到第一歧管切换到连接到第二歧管。该切换可允许更接近地满足需求。
通常通过接口接收命令。接口可以是电子接口。接口可以是机械或液压接口。该接口可以传送来自用户输入装置的命令,例如一个或多个操纵杆、柄杆、踏板或其他手动用户接口装置。
因此,致动器对命令的响应不仅取决于响应于命令而确定的致动器阀的位置(例如,它们是打开还是关闭,或者更典型地,它们打开的程度),还取决于进入相应歧管的流动,该流动也是响应于通过接口的命令和由诸如压力的其他变量而确定的。
压力依赖性使得致动器对命令的响应能够得到更好的控制,尤其是通过模拟操作者所体验的其他更低能效液压回路构造中的致动器的特征行为、响应和/或感觉。
由于进入或离开第一歧管或第二歧管的流速是独立可变的,因此第一歧管中的压力和第二歧管中的压力是独立的。这是有利的,因为否则会要求使用相同的压力驱动两组致动器,即使在它们需要极不同的流速时,这使得能量效率降低。
通常,到达或离开第一歧管和第二歧管的流速受控以使得致动器响应所接收的命令,例如寻求满足命令。例如,这些命令可指示对流体流或压力或致动器位置的需求。有可能完全满足这些需求。在某些情况下,可能只能部分满足需求。例如,如果没有比可能流体流更多的流体流就无法满足命令,则可以例如成比例地来缩减到达单个致动器的流体流,或者通过使流优先到达一个或多个致动器,而不是到达一个或多个其他致动器。
该设备可包括一个或多个第一压力传感器以测量第一歧管中的压力,以及一个或多个第二压力传感器以测量第二歧管中的压力,传感器通常在相应工作腔室和致动器阀之间的区域,例如流体从相应工作腔室组进入歧管或离开歧管到相应工作腔室组的位置。
通常,第一歧管(并且通常第二歧管也)不包括节流孔,在正常操作期间,工作流体可穿过节流孔从第一(或第二)歧管流到低压区域。
这与常见的挖掘机控制布置不同,在常见的布置中,歧管还穿过节流孔(通常是一个或多个预先确定的横截面的孔)分别连接到用于加压工作流体的控制出口(例如储罐或低压歧管),使得在使用中,有液压流体流可以穿过节流孔离开相应歧管(而不是经由一个或多个由此致动的致动器)。
在这种布置中,通常测量在节流孔紧前的歧管中的工作流体压力并将其用于控制使用负反馈的液压机(通常为泵)的排量。这些常见的挖掘机控制布置提供了致动器对命令的理想响应和/或手动控制的(移动所施加的力的)感觉与致动器移动之间的理想联系,但由于液压流体穿过使用中的节流孔漏出歧管而浪费能量。
第一组一个或多个致动器和第二组一个或多个致动器可能不包含任何共有致动器。然而,在一些实施例中,一个或多个致动器可能是第一组一个或多个致动器或第二组一个或多个致动器的部分。通常,第一组一个或多个致动器和第二组一个或多个致动器的致动器各自仅连接到单个歧管(第一歧管或第二歧管)。设备的每个致动器可以仅连接到单个歧管,而该单个歧管延伸至成组的一个或多个工作腔室。
通常,控制器构造成响应于基于从第一(或第二)歧管延伸且包括一个或多个(虚拟)阀的(虚拟)液压回路中的(虚拟)性能来计算的反馈信号来控制(且该方法包括控制)到达或离开第一歧管(通常也有第二歧管)的流动,从而控制液压流体穿过致动器阀到达或离开致动器,这些(虚拟)阀的位置根据响应于命令的致动器阀的位置而变化。虚拟性能可通过模拟的虚拟液压回路的性能来获得,该模拟考虑诸如阀或致动器位置和液压水路中的流速压力、旋转轴中的扭矩等的测量参数。
变化的(虚拟)阀的(虚拟)位置可以是(虚拟)打开横截面积,其可随致动器阀的打开横截面积(例如线性地)变化。当致动器阀的打开横截面积增加时,(虚拟)阀的(虚拟)打开横截面积可增加,也可减小。
例如,可以基于(虚拟)液压回路中的(虚拟)流体的压力或流速、或(虚拟)致动器的位置、或(虚拟)旋转轴中的扭矩等来计算反馈信号。
通常,控制器构造成响应于从第一(或第二)歧管延伸穿过一个或多个虚拟阀的虚拟流体流路中的控制点处的计算压力或流速,来控制(并且该方法包括控制)到达或离开第一歧管(并且通常也有第二歧管)的流动,这些虚拟阀根据致动器阀的位置调节虚拟流体流。
通常,虚拟流体流路延伸穿过一个或多个虚拟阀和虚拟节流孔到达较低压力区域。
通常,控制器构造成响应于从第一(或第二)歧管延伸穿过一个或多个不同虚拟阀的多个虚拟流体流路中的每一个的控制点处的计算压力或流速来控制(并且该方法包括控制)到达或离开第一歧管(并且通常也有第二歧管)的流动(流量),这些虚拟阀根据相应致动器阀的位置将虚拟流体流偏流到相应节流孔以到达较低压力区域。
可以的是,控制到达或离开第一歧管(通常也有第二歧管)的流动,使得第一歧管(通常也有第二歧管)的入口压力根据虚拟流体流路中的控制点处或多个虚拟流体流路中的每一个的控制点处的计算压力或流速而变化。
我们指的第一(或第二)歧管的入口压力是指流体从第一(或第二)组一个或多个工作腔室流入(或流出)第一(或第二)歧管处的流体压力。
可以的是,第一多个致动器阀并联连接到第一歧管。第一组一个或多个致动器可通过相应致动器阀并联连接到第一歧管。第二多个致动器阀可以并联连接到第一歧管。第二组一个或多个致动器可通过相应致动器阀并联连接到第二歧管。
可以的是,两个或多个虚拟阀被视为在虚拟流体流路中串联连接,而对应的致动器阀并联连接到第一(或第二)歧管。
我们所指的对应的虚拟阀和致动器阀是指由通常是操作者操纵杆命令的同一控制输入来控制的虚拟阀和致动器阀。致动器阀的位置决定了实际流体可以流动穿过的横截面积,也称为孔面积,而虚拟阀的虚拟位置决定了将根据虚拟阀的上游和下游的压力状况发生的穿过其中的虚拟流体的虚拟横截面积。
可以的是,有从第一(通常也有第二)歧管并联延伸的多个所述(虚拟)流路,其具有在其中的不同的一个或多个(虚拟)控制阀,并且在确定从第一组(或相应第二组)工作腔室进入第一歧管(或相应第二歧管)的流速时,考虑所述多个流路中的每一个中的计算压力或流速。
可以的是,在从第一歧管(通常也有第二歧管)平行延伸的所述多条流路中的一条中,有多个串联连接的控制阀,并且在从第一歧管(通常也有第二歧管)平行延伸的所述多条流路中的另一条中,有单个控制阀。可以的是,对于至少一个致动器,所述多个流路的两个都包括控制阀,其孔面积基于同一致动器控制信号来进行确定。
可以的是,接口提供响应于第一歧管和/或第二歧管中的输入压力而变化的输出。
输出可以是响应于诸如柄杆、按钮或轮子的手动操作控制件的变化。随压力响应的变化可以是(i)手动操作控制件的运动,(ii)手动操作控制件的运动阻力,(iii)手动操作控制件所施加的力,(iv)手动操作控制件的运动阻力或所施加的力随运动的变化。这些对第一歧管和/或第二歧管中的压力的响应是已知的挖掘机控制布置的有用特征,因为它们通过感觉向人类操作者提供反馈。例如,它们将使操作者能够检测到致动器(例如挖掘机铲斗)与障碍物接触,因为连接到致动器的歧管中的压力将升高。
输出可以是电子信号。一个或多个用户可操作的手动控制件可例如通过液压联接或电子联接而联接至一个或多个致动器阀。一个或多个致动器阀可由控制器响应于通过(通常为电子)接口接收的命令进行控制。
可以的是,第一组一个或多个致动器阀或第二组一个或多个致动器阀是闭中心式的,没有通向致动器的常开路径和常闭路径,其每个都可以响应于通过接口的命令而打开,以使液压流体流到至少一个致动器。
这与挖掘机中的常见阀布置形成对比,该常见阀布置使用来自节流孔的负压力反馈,该负压力反馈通常基于通常串联连接的开中心式(默认打开)阀。
可以的是,控制器构造成控制(且该方法包括控制)到达或离开第一歧管(通常也有第二歧管)的流动,以使致动器响应于通过接口的命令,就好像歧管包括敞开的出口,工作流体穿过该敞开出口通过节流孔流到低压区域。
通常,所述节流孔是永久敞开的孔,其不是本发明的部分。在本发明中,既不存在所述节流孔,也不存在构造成测量与节流孔相邻的歧管中压力的出口压力传感器。在本发明中,不响应于来自与所述节流孔相邻的所述出口压力传感器的压力信号的负反馈而控制到达第一歧管和第二歧管的流速(可能是因为不存在压力传感器和节流孔,或者可能是因为经由阀门将路径密封(在节流孔和低压区域之间))。
可以的是,该设备构造成响应于命令选择性地引导(且该方法可包括选择性地引导)(或接收)来自(或到)多组工作腔室(通常至少75%的流体流或至少90%或100%的流体流)的大部分(大于50%)流体流到(或自)单个致动器,该单个致动器通过至少一个致动器阀仅连接到第一歧管(而不连接到第二歧管)。这根据所接收的命令而选择地(暂时地)发生。这与已知装置形成对比,在已知装置中,为了使大部分流体流被引导至单个致动器或从单个致动器接收,两个歧管均供应流体。可以的是,该设备构造成使得,如果需要,一组或多组工作腔室将响应命令从连接到第二歧管切换到连接到第一歧管,以实现这一点。该方法可包括响应于命令将一组或多组工作腔室从连接到第二歧管切换到连接到第一歧管,以将来自多组工作腔室的大部分流体流(例如,超过50%、或至少75%或至少90%或100%的流体流)选择性地引导到或出单个致动器,该单个致动器通过至少一个致动器阀仅连接到第一歧管(而不连接到第二歧管)。可以的是,每个致动器通过致动器阀仅连接到第一歧管或仅连接到第二歧管。可以的是,第一组致动器(通常还有第二组致动器)包括带有多个不同容量的致动器。可以的是,第一组致动器阀包括具有不同的最大打开横截面积的致动器阀。
可以的是,该设备构造成将工作腔室组的大多数(大于50%)、或大于75%、或大于90%或所有工作腔室选择性地连接到第一歧管或第二歧管中的一个。这选择性地(且暂时)响应于命令而发生,例如响应于到达或离开一个或多个致动器的流体流的大量需求。
可以的是,该设备构造成使得:与第一致动器相比,对于至第二致动器的给定流速改变,第一歧管中的压力改变的变化较小。
可以的是,多个(可以是部分或全部)第一致动器阀并联连接以为流体流提供从第一组工作腔室到致动器的可独立控制的并联路径。
可以的是,第二致动器阀也并联连接。
可以的是,第一组工作腔室被控制以调节到达或离开第一歧管的流动,从而使得到达(第一个或更多致动器的)第一致动器的流体流的速度、和/或到达或离开第一歧管以及用于第一组的流的速度做出响应,就好像第一歧管包括用于液压流体的节流孔一样,而实际上并不存在该节流孔。
因此,一个或多个致动器对命令的响应,以及可能的向用户提供的反馈,就像第一歧管具有所述节流孔一样进行变化。这使得致动器的运动以及可能的设备反馈能够模拟具有这种节流孔的液压控制回路,而不需要实际具有这种节流孔,从而节省能源。
可以的是,控制器模拟彼此串联连接并穿过用于液压流体的节流孔来连接到低压区域的一些或所有第一多个开中心,并计算节流孔应有的压力,以确定泵的所需排量。
可以的是,控制器构造成将一些工作腔室默认连接(以及该方法包括默认连接)到第一歧管,将一些工作腔室默认连接到第二歧管,以及当第一组致动器的流体流的需求超过该组工作腔室当时可提供的流体流的最大速度时将附加工作腔室连接到第一歧管。
因此,控制器可构造成使工作流体被引导到第一歧管和第二歧管以操作连接到第一歧管和第二歧管的致动器,使得第一歧管和第二歧管各自同时从工作腔室接收工作流体的净流的一部分。控制器还可构造成仅将工作流体引导到连接至第一歧管的一个或多个致动器,而不引导到连接至第二歧管的任何致动器,并将一个或多个工作腔室的连接从第二歧管切换至第一歧管。
因此,有时可能会有从工作腔室进入第一歧管的工作流体的净流(例如,超过液压设备的工作流体的最大流速的50%),但没有从工作腔室流入第二歧管的工作流体的净流。
通常,该设备包括多个压力传感器,多个压力传感器包括构造成测量第一歧管中的压力的至少一个压力传感器和构造成测量第二歧管中的压力的至少一个压力传感器。可以有构造成测量从第一组工作腔室到第一歧管的输入处的压力的至少一个压力传感器,以及构造成测量从第二组工作腔室到第二歧管的输入处的压力的至少一个压力传感器。控制器通常处理来自压力传感器的测量压力以及通过接口接收的控制信号,以至少确定第一组工作腔室和第二组工作腔室的排量。
可以的是,控制器响应于命令而独立控制(以及该方法包括独立控制)第一组工作腔室和第二组工作腔室的排量,此外,以实施致动器运动的阻尼。
可以的是,控制器响应于通过接口的命令而控制(以及该方法包括控制)第一工作腔室和第二组工作腔室的净排量,以独立地改变第一歧管和第二歧管中的流量。
通常,该方法通常还包括将一个或多个工作腔室从连接至第一歧管切换到连接至第二歧管。在此情况下,它们也在一起受控的该多组工作腔室之间交换。
可以的是,将到达或离开第一(通常也有第二)歧管的流动调节成主动阻尼第一组致动器中的(通常也有第二组致动器中的)一个或多个的振荡。
诸如挖掘机吊杆的线性致动器往往容易发生自然振荡,这降低了可控性,从而可能影响效率和生产率。可以建立闭环系统,其(使用压力传感器、位置传感器或其他)测量所述振荡,并通过对流量调整进行计时使得流量对压力的影响的阶段与振荡的阶段相反,从而调整机器流量以抑制振荡。
通常,通过接口接收的命令是用于致动致动器阀的流体压力(例如先导压力),或者它们可以例如是电子信号。通常,致动器阀是常闭阀。
液压回路可包括一个或多个其他歧管,每个歧管在相应其他所述组一个或多个工作腔室和其他组一个或多个致动器之间延伸,该一个或多个其他歧管各自具有相应其他多个致动器阀,这些致动器阀可受控以调节从相应其他组一个或多个工作腔室到相应其他组一个或多个致动器的液压流体流。可以的是,一个或多个或所有工作腔室可在连接到第一歧管和连接到第二歧管以及连接到其他歧管中的一个之间切换。
然而,可以的是,所述多个工作腔室仅连接到第一歧管或第二歧管,而不连接到任何其他歧管。
液压回路可包括一个或多个固定连接的工作腔室,工作腔室也具有随可旋转轴的旋转而循环变化的容积,并且通常具有在控制器的控制下可独立改变的净排量,这些工作腔室通过一个或多个其他歧管固定连接到一个或多个其他致动器,通常其中固定连接的工作腔室不能在连接到一个歧管和连接到另一歧管之间切换。
附图说明
现在参考以下附图说明本发明的一个或多个示例:
图1是已知的挖掘机致动器控制设备的示意图;
图2是来自图1的已知设备的负反馈控制表的示意图;
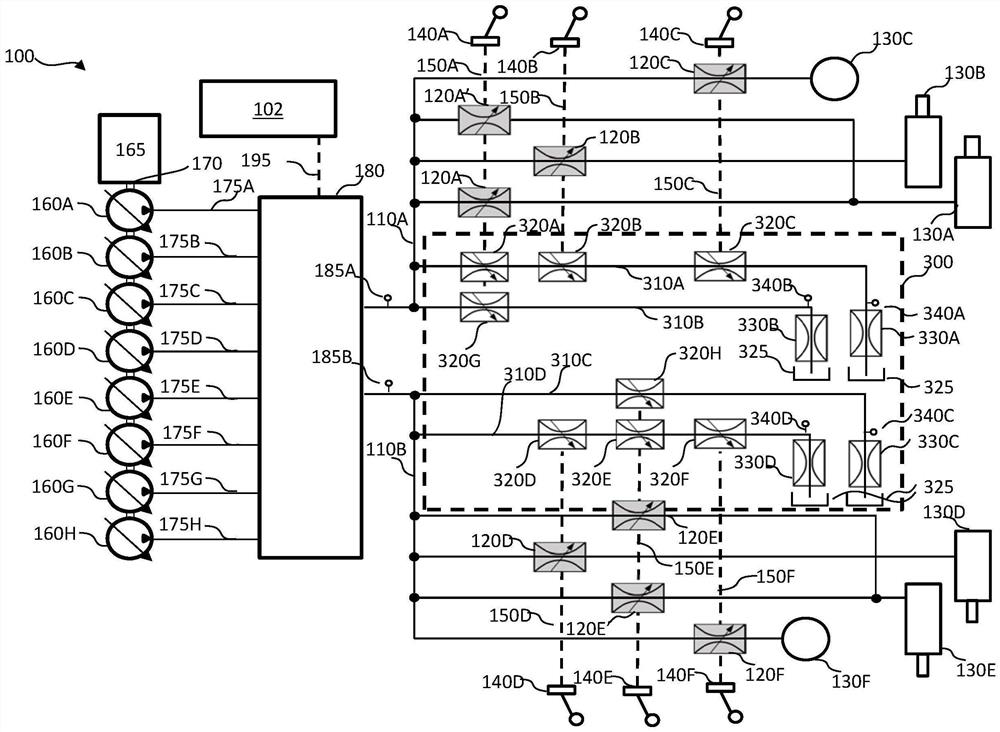
图3是根据本发明的挖掘机致动器控制布置的示意图;
图4是用与本发明一起使用的泵模块的示意图;
图5是控制器的示意图;
图6是供根据本发明的设备使用的负反馈控制表的示意图;
图7是根据本发明的在不同功能压力下的流速(y轴)与命令信号(x轴)的图;以及
图8与图7相对应,但用于没有根据本发明所计算的反馈的设备。
具体实施方式
参考图1,用于液压挖掘机的致动器的典型液压控制系统采用第一歧管10A和第二歧管10B,其布置成分别从可变排量泵15A、15B接收液压流体。每个歧管延伸穿过多个闭中心式致动器控制阀20A、20B、20C、20D、20E、20F、20G、20H到致动器30A(吊杆)、30B(铲斗)、30C(挖斗功能)、30D(右行驶)、30E(左行驶)、30F(摆动功能)。在本示例中,大部分致动器经由单个可单独控制的致动器阀从单个歧管接收流体,但两个更高容量的致动器(吊杆30A和挖斗30C)经由相应流路从两个歧管接收流体,每个流路具有致动器阀。
命令接口包括手动操作的控制杆40A、40B、40C、40D、40F、40H,操作者使用这些控制杆控制致动器30A、30B、30C、30D、30E、30F。可通过先导液压控制线路50A、50B、50C、50D、50F、50H移动控制杆以打开或关闭相应致动器阀。当阀从关闭位置打开时,其打开横截面积从零增加,允许流体从相应歧管流到致动器。可以通过改变水平位位置来连续地控制流体流的速度。在一些实施方式中,闭中心式阀可以沿两个相反方向中的任一个打开,例如,以沿相反方向操作致动器。
控制线路还延伸至开中心式控制阀60A、60B、60C、60D、60E、60F、60G、60H。开中心式控制阀60A、60B、60C、60D串联连接,从第一歧管10A经由规定了横截面积的呈孔70A形式的节流部延伸至储罐(低压部)75。开中心式控制阀60E、60F、60G、60H串联连接,从第二歧管10B经由规定了横截面积的呈孔70B形式的其他节流部延伸至储罐(低压部)75。压力传感器80A、80B测量孔的控制阀侧上的控制压力。
当对应的致动器阀关闭(在最小打开横截面积的点处)时,开中心式控制阀打开(在最大打开横截面积的点处),并且它们在致动器阀打开时关闭。对于一些致动器,控制杆操作单个致动器阀和对应的单个控制阀。对于操作连接到各歧管的致动器阀的控制杆(40A、40C),控制线路(50A、50C)延伸至连接到各歧管的致动器阀和控制阀,并协同调节这二者。
当致动器阀打开时,流体流到相应致动器,流速由致动器阀的打开程度(其打开横截面积)和通向各歧管的入口处的输入压力来决定。在稳定状态下,来自泵的流速以与致动器消耗相同的速度供应流体。
当没有连接到单个歧管的致动器进行操作时,旁通流体流可以从每个歧管流到储罐,除相应孔外,流动阻力最小。因此,在相应孔处测量的控制压力几乎与同一歧管的入口压力相同。当致动器阀打开时,对应的控制阀关闭,穿过控制阀的流动阻力增加,而控制压力相对于输入压力降低。
在操作期间,连续测量控制压力,并改变每个泵的排量,以给出根据所测量的控制压力(P,x轴)(由传感器80A测量的第一歧管10A的控制压力和由传感器80B测量的第二歧管10B的控制压力)而确定的流速(F,y轴)。图2示出了测量压力P和流速F之间的关系。该负反馈布置在本领域中被称为Negacon,并产生致动器对命令的独特响应。
应当注意,尽管第一歧管和第二歧管的输入压力既没有被测量也没有被直接控制,但它们由于响应于在孔80A和80B之前所测量的控制压力的泵流速的负反馈控制而间接受控。如果致动器中的流体具有高压,或致动器因面对阻力而无法移动,则相应歧管的输入压力将增加,因为负反馈控制将导致流量增加,直到输入压力稳定在相对较高的值。这是已知的Negacon装置的感觉的重要部分,我们已经意识到复制该感觉将是有利的。
图3是根据本发明的布置100的示意图。虚线框300内的部件不是真实部件,而是虚拟部件,其功能由控制器102模拟,如下所述。如图1的布置,有第一歧管110A和第二歧管110B,每个歧管在是第一歧管的情况下延伸至多个液压致动器130A、130B、130C,在是第二歧管的情况下延伸至多个液压致动器130D、130E、130F。到达各致动器的流在第一歧管的情况下由致动器阀120A、120B、120C、120A’控制,在第二歧管的情况下由致动器阀120D、120E、120F、120E’控制。致动器阀由与每个致动器相关联的控制级140A、140B、140C、140D、140E、140F借助液压控制线路150A、150B、150C、150D、150E、150F中的先导压力进行控制。
多个泵模块160A-H由原动机165经由共有旋转轴170驱动,并具有输出歧管175A-H,输出歧管可通过阀网络180切换地连接到第一歧管110A或第二歧管110B。阀网络由控制器102通过控制线路195进行控制。控制器还控制每个单独泵模块的排量。因此,控制器可以通过控制单独泵模块的排量以及控制哪些泵模块成组在一起并连接到每个歧管来调节每个歧管的流速。压力传感器185A、185B测量第一歧管110A和第二歧管110B处的输入压力,并将其测量值传输到控制器。
在本示例中,每个致动器仅连接到单个歧管,该歧管包括可能消耗泵模块的全部最大排量的某些致动器(并且因此致动器将需要连接到图1中的已知系统的两个歧管)。对于这些高容量致动器,并联连接的两个致动器阀提供由同一控制杆控制的从同一歧管到单个致动器的流体,例如致动器阀120A和120A’提供由控制杆140A调节的从第一歧管到致动器130A的并行流,而致动器阀120E、120E’提供由控制杆140E调节的从第二歧管到致动器130E的并行流。然而,可以采用用于流体流的带有较大横截面积的单个阀,而不是使用并联的两个致动器阀。
现在将参考图4和图5描述控制器和泵模块的功能。图4是对本发明有用的单独泵模块160的示意图。泵模块是实施泵模块的电子换向液压机(ECM)200的一部分。ECM包括多个工作腔室,工作腔室具有缸体202,该缸体具有由缸体的内表面和活塞206限定的工作容积204,活塞206借助偏心凸轮208由可旋转轴170驱动并且在缸体内往复运动以循环地改变缸体的工作容积。可旋转轴牢固地连接到驱动轴并随其旋转。轴位置和/或速度传感器210确定轴的瞬时角度位置和/或转动速度,并且通过信号线212传输到控制器102,这使得机器控制器能够确定每个缸体的循环的瞬时相位。
工作腔室各自与以电子致动的面密封提升阀214的形式的低压阀(LPV)相关联,这些提升阀具有相关联的工作腔室并且可操作为选择性地密封从工作腔室延伸到低压液压流体歧管216的通道,该通道可以将一个或若干个工作腔室,或者实际上如在此所示的泵模块中的全部工作腔室连接到该设备的低压液压流体歧管和储罐75。低压阀是常开式电磁致动阀,当工作腔室内的压力小于或等于低压液压流体歧管内的压力时,即在吸入冲程期间,该电磁致动阀被动地打开,以使工作腔室与低压液压流体歧管流体连通,但是在控制器的主动控制下经由低压阀控制线路218可选择性地关闭,以使工作腔室与低压液压流体歧管脱离流体连通。阀替代地可以是常闭阀。
工作腔室还各自与相应高压阀(HPV)220相关联,高压阀各自呈压力致动的递送阀的形式。高压阀从其相应工作腔室向外打开,并且每个高压阀可操作成密封从工作腔室延伸到高压液压流体歧管222的相应通道,相应通道可将一个或若干个工作腔室,或实际上如图2所示所有工作腔室连接到泵模块的高压液压流体歧管175。高压阀用作常闭式压力打开止回阀,该止回阀由于阀两侧压差,并考虑到高压阀内的偏置构件的力而被动打开。高压阀还用作常闭式电磁致动止回阀,一旦高压阀被相关联的工作腔室内的压力打开,则控制器可经由高压阀控制线路224选择性地保持该电磁致动止回阀打开。通常,高压阀不可由控制器抵抗高压液压流体歧管中的压力打开。当高压液压流体歧管中有压力但是工作腔室中没有压力时,高压阀可附加地在控制器的控制下打开,或者可部分打开。
在泵运行模式中,控制器这样来选择由液压泵从工作腔室到高压液压流体歧管的液压流体的净排出速度,即通过通常在相关联的工作腔室的循环中的最大容积点附近主动关闭一个或多个低压阀、关闭通向低压液压流体歧管的路径并且由此在随后的收缩冲程上穿过相关联的高压阀导出液压流体(但并不主动保持高压阀打开)。该控制器选择低压阀关闭和高压阀打开的数量和序列以产生流动,或产生轴扭矩或动力以满足所选择的净排出速度。控制器的上述“选择”会定期或连续刷新。当泵模块从连接至第一歧管移动到连接至第二歧管时,该选择将刷新或更新,或反之亦然。
一些实施例可包括泵模块,这些泵模块还能够作为马达运行,从而从回收自液压致动器的液压流体再生能量,并将其转换为机械能,例如当致动器降低或当轮马达作为泵操作以施加制动扭矩时。在这些情况下,在这样的情况下泵模块的工作腔室也适用于马达,在这种情况下,控制器主动控制高压阀和低压阀并可执行马达运行模式,其中控制器选择液压机经由高压液压流体歧管排出的液压流体的净排出速度,在相关联的工作腔室的循环的最小容积点之前不久主动关闭一个或多个低压阀,关闭通向低压液压流体歧管的路径,从而导致工作腔室中的液压流体被收缩冲程的剩余部分压缩。当穿过相关联的高压阀的压力平衡时,相关联的高压阀打开,并且通过相关联的高压阀导出少量液压流体,相关联的高压阀由液压机控制器保持打开。然后,该控制器主动将该相关联的高压阀保持打开,通常直到接近该相关联的工作腔室的循环中的最大容积为止,从而允许液压流体从高压液压流体歧管到工作腔室并且将扭矩施加至可旋转轴。
除了确定是否基于逐个周期关闭LPV或保持LPV打开,该控制器可操作为相对于变化的工作腔室容积来改变HPV的关闭的精确相位,并且由此选择从高压液压流体歧管到低压液压流体歧管的液压流体的净排出速度,或反之亦然。
歧管216、175上的箭头指示处于泵运行模式中的液压流体流动;在马达运行模式中,流动是反向的。
实际上,有许多如图4所示的泵模块,由共有轴和单个控制器连接,通常使用可以将控制信号传输到与每个泵模块的每个工作腔室相关联的阀的单个轴位置传感器。泵模块内的工作腔室无需围绕轴均匀间隔开,而是通常相互交错以沿轴分配负载。
因此,尽管构成每个泵模块的工作腔室是固定的,但可以根据需要改变对第一歧管和第二歧管提供流的泵模块。
在一些实施例中,除了所示出的工作腔室、歧管和致动器外,还将有一个或多个联接到共有轴的其他泵模块(包括一个或多个工作腔室),这些泵模块通过固定连接部对一个或多个其他致动器供应流体(或从一个或多个其他致动器接收流体)。这类固定服务对某些类型的致动器有用,例如转向致动器。
图5是控制器102的示意图。控制器包括与存储器252进行电子通信的处理器电路250,存储器252存储:泵模块以及哪些工作腔室与哪些泵模块固定地关联的数据库254、哪些泵模块当前连接到哪个歧管的数据库256、以及关于模拟的液压流体回路200的参数的数据258。控制器通过信号线路262接收第一液压回路歧管和第二液压回路歧管中的每一个的压力和任何其他相关测量信号260、以及轴位置和/或速度信号。反馈信号260可以是简单的压力信号,但其也可以接收致动器位置信号、流量测量、温度测量、例如操作者命令的命令、排量需求信号等。来自控制器的输出包括工作腔室阀控制线路218、224(用于控制LPV,如果需要,还控制HPV)和控制切换块内的阀的阀切换控制线路264。
在一些实施例中,是控制器接收例如来自电子接口或用户输入外设的命令并控制致动器阀,而不是独立于控制器传达致动器阀命令。
在操作期间,控制器从默认构造开始维护哪些泵模块连接到哪些歧管的数据库。控制器还维护液压流体的所需容积和由连接到相应歧管的泵模块递送到各歧管的液压流体的容积之间的差值的累加器(其是存储在控制器中的内部变量)266A、266B。当可旋转轴转动时,在不同时间(轴位置)到达用于各种工作腔室的决策点。在给定工作腔室的决策点,控制器确定工作腔室连接到哪个液压回路模块(需要查询泵模块以及哪些工作腔室与哪些泵模块固定地相关联的数据库254、、以及哪些泵模块当前连接到哪个歧管的数据库256),然后控制器更新工作腔室根据所接收的该歧管的需求而连接到的歧管的累加器。然后,控制器将累加器的值与阈值进行比较,如果累计需求超过阈值,则控制器将安排发送阀控制信号以使工作腔室执行有效循环,其中工作腔室产生工作流体的净排量,并从累加器所存储的值中减去工作流体的净排量。否则,它使得工作腔室执行无效循环,其中工作腔室不产生工作流体的净排量(例如,控制器可将信号传输到工作腔室的低压阀,以在整个工作腔室容积循环中使低压阀保持打开),并且不修改累加器。以此方式,控制器根据与工作腔室连接的歧管的需求决定每个工作腔室是否执行有效循环。累加器和需求信号可使用任何方便的单元。在一个已知示例中,需求表示为“排量分数”,其是旋转轴每转的最大可能排量的分数,称为F
控制器将不时地确定是否需要将泵模块从一个液压回路模块重新分配到另一液压回路模块,以满足变化中的液压流体需求。在这种情况下,控制器将控制信号传输到阀网络180中的相关阀以将泵模块的高压歧管从一个歧管切换到另一歧管,并更新哪些泵模块当前连接到哪些液压回路模块的数据库256。因此,将来,当到达泵模块的每个工作腔室已从分配到一个歧管切换到分配到另一歧管的决策点时,控制器读取新歧管的排量累加器的值并由此读取新歧管对液压流体的需求。
再次参考图3,在操作期间,响应于之前的用户命令打开和关闭致动器阀,以调节第一歧管和第二歧管到各种致动器的连接。然而,每个泵模块的排量是使用与每个泵模块所连接的歧管相关的反馈信号来确定,并基于虚拟液压回路300的计算响应中的虚拟流体压力来计算的。
虚拟液压回路包括第一虚拟回路分支310A,该分支从第一歧管100A依次穿过虚拟控制阀320A、320B、320C,经由节流孔330A延伸至低压池325。第二虚拟回路分支310B从第一歧管110A延伸,与第一虚拟分支310A并联,穿过虚拟控制阀320G经由节流孔330B到达低压池325。相对应地,第三虚拟回路分支310C从第二歧管110B穿过虚拟控制阀320H经由节流孔330C延伸至低压池325,并且并联地,第四虚拟回路分支310D从第二歧管110B穿过虚拟控制阀320E、320G、320H经由节流孔330D延伸至低压池325。分别带有双致动器阀120A、120A’和120E、120E’的高容量致动器130A、130E(或单个大容量致动器阀)在从两个关联的虚拟回路分支所连接的歧管延伸的两个关联虚拟回路分支中的每一个中具有对应的虚拟控制阀(分别为320A、320G和320E、320H)。
虚拟液压回路300的参数258存储在存储器252中,并更新以模拟液压虚拟回路的功能。该模拟利用压力传感器185A和185B所测量的第一液压歧管和第二液压歧管中的输入压力的实时测量。虚拟控制阀被视为具有打开横截面积,该打开横截面积在对应的致动器阀的打开横截面积增加时减小(320A和320G被视为当120A和120A’更为关闭时更为打开;320B被视为当120B更为关闭时更为打开;320C被视为当120C更为关闭时更为打开;320D被视为当120D更为关闭时更为打开;320E和H被视为当120E和120E’更为关闭时更为打开;320F被视为当120F更为关闭时更为打开)。实际上,每个虚拟控制阀的打开横截面积可以确定为来自每个控制杆的控制信号的测量参数。在一些实施例中,来自用户控制件或来自电子接口的信号将用于控制致动器阀和确定虚拟控制阀的虚拟位置。
给定第一液压歧管和第二液压歧管中的输入压力以及每个虚拟控制阀和虚拟节流孔330A、330B、330C、330D的模拟打开横截面积,则计算每个虚拟阀两侧的压降,从而计算液压虚拟回路中的流体压力和流速。特别相关的是存在于液压虚拟回路中的计算压力,如果其是真实的,则是在节流孔之前的虚拟回路分支中的位置340A、340B、340C、340D处。
为了进行此计算,监测每个致动器的控制信号150A、150B、150C、150D、150E、150F。对于每个虚拟控制阀320A、320B、320C、320D、320E、320F、320G、320H,基于对应的控制信号从查找表计算或确定虚拟打开横截面积。当对应的致动器阀的打开横截面积如相应控制信号所示增加时,虚拟打开横截面积减小。
对于包括多个串联的虚拟控制阀的每个虚拟液压回路分支,从每个单独控制阀的虚拟打开横截面积A计算总等效打开横截面积A
对于每个虚拟液压回路分支,计算从相应歧管穿过回路分支的模拟泄露流q,例如使用以下公式,其中A是单个阀的虚拟打开横截面积,或在有多个虚拟阀时是A
然后,可以例如使用查找表从该流速计算虚拟节流孔340A、340B、340C、340D之前的计算压力,并将所得的压力用作负反馈信号,以选择将流体输送到相应歧管的工作腔室组的净流速。
参考图6,基于连接到该歧管的回路分支(对第一歧管110A是310A和310B;对第二歧管110B是310C和310D)的每个计算压力P
然后计算连接到相应歧管的泵模块的排量,以给出所需流速,并由此做出是否使工作腔室容积的各个循环执行有效循环或无效循环的决策。这可涉及考虑到连接到相应歧管的泵模块的数量和容量以及可旋转轴的当前旋转速度来计算与所需流速相对应的排量分数(F
如果一个歧管的排量需求超过当前连接到该歧管的泵模块的工作腔室的最大可能需求,则通过致动阀网络180中的阀将一个或多个泵模块从另一歧管移动,并更新泵模块分配256。如果不可能同时输送两个歧管的总需求,则可以根据预先确定的优先级方案在第一歧管和第二歧管之间划分泵模块。
因此,输送到每个歧管的流量类似于已知的Negacon布置,且操作者对系统的感觉将类似于已知的Negacon装置。然而,有一些关键的区别和益处:
首先,由于歧管分支是虚拟的,因此没有穿过实际节流孔的实际工作流体损失,提高了能量效率。
此外,这是使用相对少的额外传感器来实现的。例如,一些实施例可以仅测量歧管输入压力和用户命令,以确定流速。然而,可以包括额外的传感器,诸如额外的压力传感器(例如在致动器处)、致动器位置传感器、流量传感器等。
泵模块及其工作腔室可以从一个歧管重新分配到另一歧管,以解决流向不同致动器的流体流量需求的变化。因此,由于大部分泵模块可以在需要时临时连接到单个歧管,可以从单个歧管供应可能需要泵模块的最大总输出的一半以上的高容量致动器。
对于现有挖掘机,部分地基于同时使用致动器的频率而将它们分配到一个或另一歧管,以减少同时使用同一歧管上的两个或多个致动器的频率。其原因之一是与从单个压力源对两个不同压力水平的致动器供应流体相关联的能量损失,但是,可以要求具有高流量需求的致动器连接到两个歧管,使得所有组合泵流都能够被引至它们。这实际上是将两个歧管合并为一个。根据本发明,可以将可在不同压力或流速下同时操作的致动器分配到不同歧管。连接到每个歧管的泵容量可以动态改变,由此对任何高流量致动器提供所需流量而不会使系统减少到单个压力源。这提高了能量效率。
在图3的示例中,并联的虚拟回路分支310A和310B用于控制当操作高容量致动器130A时的流量,而并联的虚拟回路分支310C和310D用于控制当操作高容量致动器130E时的流量。提供额外的虚拟回路分支310B和310C、和计算相应虚拟控制阀320G、320H和节流孔330B、330C之间的位置340C、340C处的压力、以及额外的致动器控制阀(或单个大横截面致动器控制阀)使得当操作相应高容量致动器时能够使用泵模块的流量的一半以上的输出而不需要将这些致动器连接到第一歧管和第二歧管(如图1)。这是有利的,因为当使用高容量致动器时,第一歧管和第二歧管可以保持在不同的压力和流速,从而节省能源和简化控制,并且还可以通过机器将泵模块从连接到一个歧管移动至连接到另一歧管的能力来实现,以支承在操作其时将流体输送到高容量致动器。
有利的是,在本示例中,系统的流速和响应始终随歧管输入压力而变化。歧管输入压力是重要参数,因为其决定了进入致动器的流体流的速度。进入致动器的流体流在任何给定时间都根据歧管入口压力而变化,如上所述,致动器中的压力和相关致动器阀的打开横截面积以及如上所述的典型Negacon系统确实提供了该特征压力依赖性,因此为控制系统提供了对操作者有用的独特感受。这也提供了一些平滑的响应。此外,在某些构造中,操作者实际上可以感觉到歧管中的压力,例如在控制操纵杆的移动阻力方面。根据本发明的布置可以有利地复制这种感觉。
该压力依赖性如图7所示,图7示出了对不同致动器控制信号值(x轴)的以升每分钟为单位的流速(y轴),诸如来自操纵杆的液压控制线路中的先导压力,对于多个不同功能压力中的每一个,是流体所供应到的致动器内的压力。这与系统的对应响应形成对比,该系统在物理部件上是对应的,但改变了泵模块流速,并仅使用控制信号的前馈在歧管之间重新分配泵模块,如图8所示,而没有上述负反馈。
此外,由于分配给每个致动器的额外虚拟歧管分支、虚拟控制阀、虚拟控制压力和虚拟节流孔,高容量致动器130A、130E对其余致动器具有不同的压力响应。
尽管在本示例中,计算虚拟液压回路内的压力并通过负反馈用其确定第一组泵模块和第二组泵模块的流速,但可以基于其他计算特性来计算负反馈信号,例如计算的虚拟流量或虚拟致动器的运动位置或运动速度。
此外,尽管在给定的示例中,每个歧管的流体流速是通过有效模拟虚拟液压回路部分的特性来确定的,但控制器可以使用替代算法来计算流体流速,并且在任何情况下,可以根据需要进一步修改计算出的反馈信号,例如,可以对其进行过滤以引入平滑。模拟部件的特性可以会永久性地或在不同的操作模式中发生变化(例如,以提供用户选项),例如,可以增加虚拟控制阀打开横截面,以增加对负载压力的敏感性,并减少系统中的压降,尽管这样做的效果是相应控制操纵杆将具有更大的失灵带。
在这些示例中,泵模块用作泵,并将流体递送到致动器。然而,当工作腔室作为从致动器接收流体的马达而受控时,本发明也可操作。因此,泵模块可以在替代操作模式中成为可操作的泵和马达。这有助于从由致动器返回的液压流体进行能量再生。
- 用于飞行器的控制表面的致动器组件、包含该致动器组件的飞行器及使用它们的方法
- 用于电致动凸轮轴相位器的液压锁定器
- 用于使用多个控制器控制电子设备的显示器的方法和设备
- 液压致动器的控制装置和液压致动器的控制方法
- 液压致动器的控制装置和液压致动器的控制方法