一种灯带卷盘、灯带卷盘制造设备及其制造方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明属于卷盘技术领域,涉及一种灯带卷盘、灯带卷盘制造设备及其制造方法。
背景技术
灯带卷盘用于缠绕灯带,方便灯带的保存和使用;传统的灯带卷盘一般为定宽结构,无法去柔性的适配不同的板宽的灯带,使用范围比较受限;并且,现有的灯带卷盘一般通过工人手工操作完成制造,耗时耗力。
发明内容
有鉴于此,本发明提供一种灯带卷盘、灯带卷盘制造设备及其制造方法,可以适配不同宽度的灯带。
为了解决上述问题,根据本申请的一个方面,本发明的实施例提供了一种灯带卷盘,灯带卷盘包括第一盘面、第二盘面以及轴心结构,第一盘面位于轴心结构的一端,第二盘面位于轴心结构的另一端,且轴心结构能够相对于第一盘面和第二盘面旋转;轴心结构包括至少一个轴心片。
在一些实施例中,当轴心结构包括多个轴心片时,多个轴心片叠加在一起形成轴心结构;且轴心片的数量与灯带的宽度正相关。
在一些实施例中,每个轴心片的厚度为1-5mm。
在一些实施例中,每个轴心片的厚度为2mm。
在一些实施例中,第一盘面、第二盘面以及轴心结构均采用纸质材质。
在一些实施例中,第一盘面和第二盘面上均开设有用于观察灯带剩余量的缺口。
根据本申请的另一个方面,本发明的实施例提供了一种灯带卷盘制造设备,用于制造上述的灯带卷盘,灯带卷盘制造设备包括工作台面、第一盘面抓取组件、第二盘面抓取组件、轴心片抓取组件、固定组件以及卷盘抓取组件,第一盘面抓取组件、第二盘面抓取组件、轴心片抓取组件、固定组件以及卷盘抓取组件均围绕工作台面设置,且第一盘面抓取组件、第二盘面抓取组件、轴心片抓取组件、固定组件以及卷盘抓取组件均能够在水平方向和竖直方向上移动。
在一些实施例中,工作台面上具有至少一个组装位,组装位包括定位柱,定位柱的一侧设置有第一固定孔,定位柱的另一侧设置有第二固定孔。
在一些实施例中,第一盘面抓取组件包括第一水平机械臂、第一竖直机械臂以及第一吸盘,第一竖直机械臂固定在第一水平机械臂的一端,第一吸盘固定在第一竖直机械臂的端部;且第一水平机械臂和第一竖直机械臂控制第一吸盘在在水平方向和竖直方向上移动;
和/或第二盘面抓取组件包括第二水平机械臂、第二竖直机械臂以及第二吸盘,第二竖直机械臂固定在第二水平机械臂的一端,第二吸盘固定在第二竖直机械臂的端部;且第二水平机械臂和第二竖直机械臂控制第二吸盘在在水平方向和竖直方向上移动;
和/或轴心片抓取组件包括第三水平机械臂、第三竖直机械臂以及机械手,第三竖直机械臂固定在第三水平机械臂的一端,机械手固定在第三竖直机械臂的端部;且第三水平机械臂和第三竖直机械臂控制机械手在在水平方向和竖直方向上移动;
和/或固定组件包括上固定单元和下固定单元,上固定单元和下固定单元均包括第四水平机械臂、第四竖直机械臂、气钉枪以及储钉室,第四竖直机械臂固定在第四水平机械臂的一端,气钉枪固定在第四竖直机械臂的端部,储钉室固定在第四竖直机械臂且跟随所示第四竖直机械臂上下移动,储钉室还与气钉枪连通。
根据本申请的另一个方面,本发明的实施例提供了一种灯带卷盘的制造方法,制造方法包括:
S1,通过第一盘面抓取组件将第一盘面置于工作台面的组装位上;
S2,旋转工作台面使得组装位移动至轴心片抓取组件处,通过轴心片抓取组件将轴心结构置于第一盘面上;
S3,旋转工作台面使得组装位移动至第二盘面抓取组件处,将第二盘面置于轴心结构上;
S4,旋转工作台面使得组装位移动至固定组件处,通过固定组件将第一盘面、第二盘面以及轴心结构进行固定,形成灯带卷盘;
S5,通过卷盘抓取组件将灯带卷盘移动至流水线;
其中,根据对应灯带的宽度匹配不同数量的轴心片;
通过固定组件将第一盘面、第二盘面以及轴心结构进行固定,具体为:
通过上固定单元的气钉枪从第二盘面的上方进行打钉,打钉完成后上固定单元的气钉枪持续按压第一盘面,同时下固定单元的气钉枪从第一盘面的下方进行打钉。
与现有技术相比,本发明的灯带卷盘至少具有下列有益效果:
传统的灯带卷盘一般为定宽结构,无法去柔性的适配不同的板宽的灯带,使用范围比较受限;而本发明提供的灯带卷盘可以根据灯带的宽度柔性适配合适数量的轴心片,以达到轴心结构任意宽度的需求,并且整个过程操作简单,易于推广。
另一方面,现有的灯带卷盘一般通过工人手工操作完成制造,而本发明的灯带卷盘制造设备实现了灯带卷盘的自动化制造,节约了人力成本,具有高效的优势。
另一方面,本发明提供的灯带卷盘的制造方法是基于上述灯带卷盘设计的,其有益效果参见上述灯带卷盘的有益效果。
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
为了更清楚地说明本发明实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
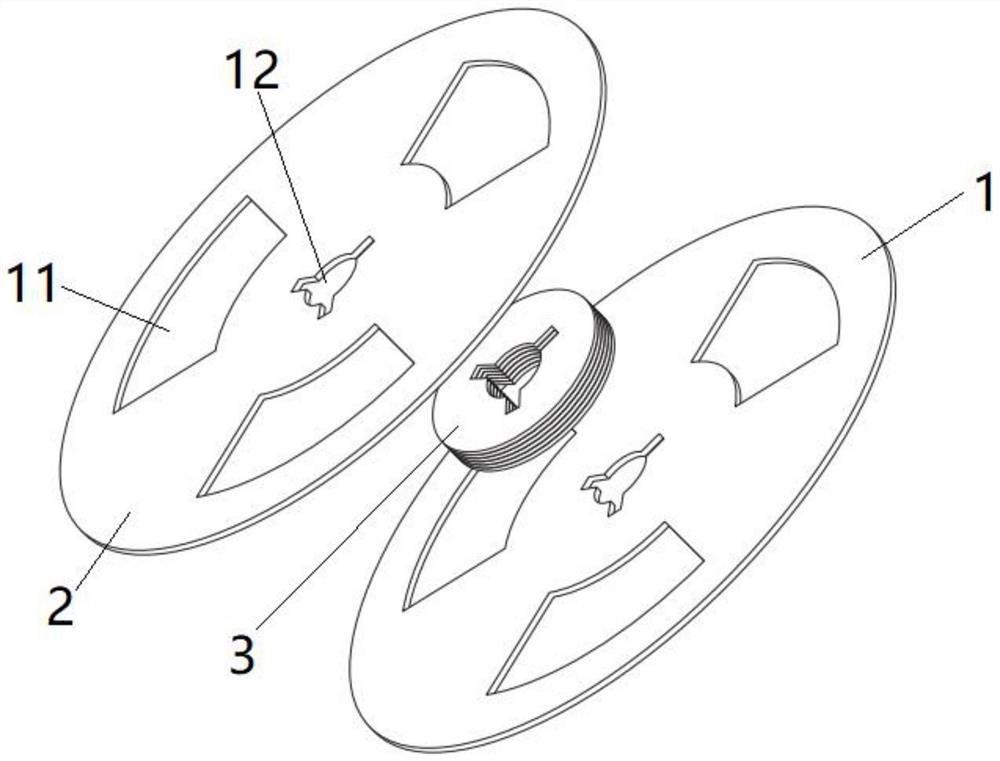
图1是本发明的实施例提供的一种灯带卷盘的结构分解图;
图2是本发明的实施例提供的一种灯带卷盘制造设备的结构示意图;
图3是本发明的实施例提供的一种灯带卷盘制造设备中工作台面的结构示意图;
图4是本发明的实施例提供的一种灯带卷盘制造设备中第一盘面抓取组件的结构示意图;
图5是图4中A处的局部放大图;
图6是本发明的实施例提供的一种灯带卷盘制造设备中轴心片抓取组件的结构示意图;
图7是图6中B处的局部放大图;
图8是本发明的实施例提供的一种灯带卷盘制造设备中第二盘面抓取组件的结构示意图;
图9是图8中C处的局部放大图;
图10是本发明的实施例提供的一种灯带卷盘制造设备中固定组件的结构示意图;
图11是本发明的实施例提供的一种灯带卷盘制造设备中固定组件的另一结构示意图;
图12是本发明的实施例提供的一种灯带卷盘制造设备中卷盘抓取组件的结构示意图;
图13是图12中D处的局部放大图。
其中:
1、第一盘面;2、第二盘面;3、轴心结构;4、工作台面;5、第一盘面抓取组件;6、第二盘面抓取组件;7、轴心片抓取组件;8、固定组件;9、卷盘抓取组件;11、缺口;12、固定孔;41、定位柱;42、第一固定孔;43、第二固定孔;51、第一水平机械臂;52、第一竖直机械臂;53、第一吸盘;54、第一物料仓;55、第一支架;61、第二水平机械臂;62、第二竖直机械臂;63、第二吸盘;64、第二物料仓;65、第二支架;71、第三水平机械臂;72、第三竖直机械臂;73、机械手;74、第三物料仓;75、第三支架;81、第四水平机械臂;82、第四竖直机械臂;83、气钉枪;84、储钉室;85、气钉;91、第四水平机械臂;92、第四竖直机械臂;93、抓取机械手;94、第四支架。
具体实施方式
为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明申请的具体实施方式、结构、特征及其功效,详细说明如后。在下述说明中,不同的“一实施例”或“实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构、或特点可由任何合适形式组合。
在本发明的描述中,需要明确的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序;术语“垂直”、“横向”、“纵向”、“前”、“后”、“左”、“右”、“上”、“下”、“水平”等指示方位或位置关系为基于附图所示的方位或位置关系,仅仅是为了便于描述本发明,而不是意味着所指的装置或元件必须具有特有的方位或位置,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例1
本实施例提供一种灯带卷盘,如图1所示,灯带卷盘包括第一盘面1、第二盘面2以及轴心结构3,第一盘面1位于轴心结构3的一端,第二盘面2位于轴心结构3的另一端,且轴心结构3能够相对于第一盘面1和第二盘面2旋转;轴心结构3包括至少一个轴心片。
具体地,第一盘面1、第二盘面2以及轴心结构3均为圆形的片状结构,且第一盘面1、第二盘面2以及轴心结构3的中心均设置有对应的固定孔12,固定孔12主要用于将本实施例提供的灯带卷盘固定在对应的装置上,以实现将灯带顺利地固定在灯带卷盘上或者顺利地从灯带卷盘上拿下。
传统的灯带卷盘一般为定宽结构,无法去柔性的适配不同的板宽的灯带,使用范围比较受限;而本实施例提供的灯带卷盘可以根据灯带的宽度柔性适配合适数量的轴心片,以达到轴心结构任意宽度的需求,并且整个过程操作简单,易于推广。
在具体实施例中,当轴心结构3包括多个轴心片时,多个轴心片叠加在一起形成轴心结构3;且轴心片的数量与灯带的宽度正相关。
具体地,正相关是指自变量增长,因变量也跟着增长,两个变量变动方向相同,一个变量由大到小或由小到大变化时,另一个变量亦由大到小或由小到大变化;在本实施例中具体为:灯带的宽度由大到小或由小到大变化时,轴心片的数量亦由大到小或由小到大变化。
在具体实施例中,每个轴心片的厚度为1-5mm,优选2mm。
具体地,灯带缠绕在轴心结构3上,而轴心结构3由多个轴心片叠加在一起形成,轴心结构3轴向的宽度应该与灯带的宽度匹配。结合传统的灯带种类以及其对应的宽度,将轴心片的厚度设置为1-5mm时,可基本满足所有宽度的灯带,使得本实施例提供的灯带卷盘具有更广的应用范围。
在具体实施例中,第一盘面1、第二盘面2以及轴心结构3均采用纸质材质。传统的灯带卷盘一直以PS塑胶卷盘为主,由于卷盘的其他生活用途并不高,PS塑胶也不能降解,人们因此随意丢弃卷盘的话,会对环境有一定影响;而纸质材质成本低廉、适合大批量机械化生产、成型性和折叠形好、具有可回收再利用、经济环保等优点。
在具体实施例中,第一盘面1和第二盘面2上均开设有用于观察灯带剩余量的缺口11。
更具体地,在方便观察灯带剩余量的前提下,缺口11的形状不做限定,但在制造的过程中,厂商可将缺口11的形状与品牌关联起来,也可通过缺口11的形状使得本实施例中的灯带卷盘具有较好的外观。
具体地,第一盘面1和第二盘面2均为中间开设有固定孔12的圆形结构,在第一盘面1和第二盘面2的表面上,开设有至少一个缺口11,通过该缺口11,操作工人可实时观察灯带的使用情况;为了更好地进行观察,且不会过多的影响第一盘面1和第二盘面2的结构强度,缺口11设置有三个,均匀分布在对应的第一盘面1或第二盘面2的表面上。
更具体地,第一盘面1和第二盘面2中间开设的固定孔12可以方便使用者对灯带卷盘进行定位,与其它驱动装置连接,在驱动装置的作用下,实现自动化的进行收集灯带或者释放灯带。
实施例2
本实施例提供一种灯带卷盘制造设备,用于制造实施例1的灯带卷盘,如图2所示,灯带卷盘制造设备包括工作台面4、第一盘面抓取组件5、第二盘面抓取组件6、轴心片抓取组件7、固定组件8以及卷盘抓取组件9,第一盘面抓取组件5、第二盘面抓取组件6、轴心片抓取组件7、固定组件8以及卷盘抓取组件9均围绕工作台面4设置,且第一盘面抓取组件5、第二盘面抓取组件6、轴心片抓取组件7、固定组件8以及卷盘抓取组件9均能够在水平方向和竖直方向上移动。
这样,采用本实施例提供的制造设备制造灯带卷盘时,受限通过第一盘面抓取组件5将第一盘面1置于工作台面4的组装位上;旋转工作台面4使得组装位移动至轴心片抓取组件7处,通过轴心片抓取组件7将轴心结构3置于第一盘面1上;旋转工作台面4使得组装位移动至第二盘面抓取组件6处,将第二盘面2置于轴心结构3上;旋转工作台面4使得组装位移动至固定组件8处,通过固定组件8将第一盘面1、第二盘面2以及轴心结构3进行固定,形成灯带卷盘;之后通过卷盘抓取组件9将灯带卷盘移动至流水线,完成灯带卷盘的生产制造。
在上述过程,根据对应灯带的宽度匹配不同数量的轴心片;假如每个轴心片的厚度为2mm;当灯带的宽度为大于2mm,且小于6mm时,匹配两个轴心片即可,当灯带的宽度大于6mm,且小于8mm时,则匹配三个轴心片即可。需要注意的是,尽量保证轴心结构3的厚度略微大于灯带的宽度,避免第一盘面1和第二盘面与灯带直接接触后对灯带造成磨损。
在具体实施例中,如图3所示,工作台面4上具有至少一个组装位,组装位包括定位柱41,定位柱41的一侧设置有第一固定孔42,定位柱41的另一侧设置有第二固定孔43。
具体地,定位柱41用于和固定孔12配合,通过将固定孔12套设在定位柱41上,可以实现将第一盘面1、第二盘面2以及轴心结构3固定在工作台面4对应的组装位上。
在具体实施例中,如图4和图5所示,第一盘面抓取组件5包括第一水平机械臂51、第一竖直机械臂52以及第一吸盘53,第一竖直机械臂52固定在第一水平机械臂51的一端,第一吸盘53固定在第一竖直机械臂52的端部;且第一水平机械臂51和第一竖直机械臂52控制第一吸盘53在在水平方向和竖直方向上移动。
具体地,第一盘面1由人工进行上料,将其置于第一物料仓54上,第一物料仓54上升至第一盘面1与工作台面4齐平的位置;之后在电机的驱动下使得第一水平机械臂51带动第一竖直机械臂52通过第一吸盘53(或者机械手拾取方式)拾取第一盘面1,此时第一吸盘53吸住第一盘面1;之后在电机的驱动下向上移动第一盘面抓取组件5到限位点;之后再将第一吸盘53向下移动至定位柱41的正上方,第一吸盘53松开,即可将第一盘面1放置于定位柱41上;之后在电机的驱动下向上移动第一盘面抓取组件5到限位点,待下一次作业。
当然,本实施例提供的第一盘面抓取组件5还包括第一支架55,第一支架55位于第一水平机械臂51的另一端,且第一水平机械臂51能够沿着第一支架55水平移动。
另外,上述限位点可为行程开关,用于避免向上或者向下移动的距离不够而影响整个制造过程。
在具体实施例中,如图8和图9所示,第二盘面抓取组件6包括第二水平机械臂61、第二竖直机械臂62以及第二吸盘63,第二竖直机械臂62固定在第二水平机械臂61的一端,第二吸盘63固定在第二竖直机械臂62的端部;且第二水平机械臂61和第二竖直机械臂62控制第二吸盘63在在水平方向和竖直方向上移动。
具体地,第二盘面2由人工进行上料,将其置于第二物料仓64上,第二物料仓64上升至第二盘面2与工作台面4齐平的位置;之后在电机的驱动下使得第二水平机械臂61带动第二竖直机械臂62通过第二吸盘63(或者机械手拾取方式)拾取第二盘面2,此时第二吸盘63吸住第二盘面2;之后在电机的驱动下向上移动第二盘面抓取组件6到限位点;之后再将第二吸盘63向下移动至定位柱41的正上方,第二吸盘63松开,即可将第二盘面2放置于定位柱41上;之后在电机的驱动下向上移动第二盘面抓取组件6到限位点,待下一次作业。
当然,本实施例提供的第二盘面抓取组件6还包括第二支架65,第二支架65位于第二水平机械臂61的另一端,且第二水平机械臂61能够沿着第二支架65水平移动。另外,上述限位点可为行程开关,用于避免向上或者向下移动的距离不够而影响整个制造过程。
在具体实施例中,如图6和图7所示,轴心片抓取组件7包括第三水平机械臂71、第三竖直机械臂72以及机械手73,第三竖直机械臂72固定在第三水平机械臂71的一端,机械手73固定在第三竖直机械臂72的端部;且第三水平机械臂71和第三竖直机械臂72控制机械手73在在水平方向和竖直方向上移动。
具体地,轴心片由人工进行上料,将其置于第三物料仓74上,第三物料仓74上升至轴心片与工作台面4齐平的位置;之后在电机的驱动下使得第三水平机械臂71带动第三竖直机械臂72通过机械手73拾取轴心片,此时机械手73抓住轴心片;之后在电机的驱动下向上移动轴心片抓取组件7到限位点;之后再将机械手73向下移动至定位柱41的正上方,机械手73松开,即可将轴心片放置于定位柱41上;之后在电机的驱动下向上移动轴心片抓取组件7到限位点,待下一次作业。
当然,本实施例提供的轴心片抓取组件7还包括第三支架75,第三支架75位于第三水平机械臂71的另一端,且第三水平机械臂71能够沿着第三支架75水平移动。
在具体实施例中,如图10和图11所示,固定组件8包括上固定单元和下固定单元,上固定单元和下固定单元均包括第四水平机械臂81、第四竖直机械臂82、气钉枪83以及储钉室84,第四竖直机械臂82固定在第四水平机械臂81的一端,气钉枪83固定在第四竖直机械臂82的端部,储钉室84固定在第四竖直机械臂82且跟随所示第四竖直机械臂82上下移动,储钉室84还与气钉枪83连通。
具体地,固定组件8主要用于将第一盘面1、轴心结构3以及第二盘面2通过气钉固定在一起;
上固定单元工作时,第四水平机械臂81移动至第一颗打钉位置上方,第四竖直机械臂82向下移动至打钉位,通过气钉枪83进行打钉;之后重复上述步骤,完成上方的两个气钉固定;
下固定单元工作时,上固定单元的气钉枪83持续按压第一盘面1,之后将第四水平机械臂81移动至第一颗打钉位置下方,第四竖直机械臂82向上移动至打钉位,通过气钉枪83进行打钉;之后重复上述步骤,完成下方的两个气钉固定;晚上四颗气钉的打钉工作后,第四水平机械臂81、第四竖直机械臂82以及气钉枪83回到初始位置。
在其中一个实施例中,如图12和图13所示,卷盘抓取组件9包括包括第四水平机械臂91、第四竖直机械臂92以及抓取机械手93,第四竖直机械臂92固定在第四水平机械臂91的一端,抓取机械手93固定在第四竖直机械臂92的端部;且第四水平机械臂91和第四竖直机械臂92控制抓取机械手93在在水平方向和竖直方向上移动。
当然,本实施例提供的卷盘抓取组件9还包括第四支架94,第四支架94位于第四水平机械臂91的另一端,且第四水平机械臂91能够沿着第四支架94水平移动。
另外需要注意的是,本实施例提供的灯带卷盘制造设备中,所有的驱动方式不局限于电机驱动,也可通过气动的方式进行驱动,相较于电机驱动,气动驱动可以更好的节约成本。
本实施例提供的灯带卷盘制造设备实现了灯带卷盘的自动化制造,节约了人力成本,具有高效的优势。
实施例3
本实施例提供一种灯带卷盘的制造方法,制造方法包括:
S1,通过第一盘面抓取组件5将第一盘面1置于工作台面4的组装位上;
S2,旋转工作台面4使得组装位移动至轴心片抓取组件7处,通过轴心片抓取组件7将轴心结构3置于第一盘面1上;
S3,旋转工作台面4使得组装位移动至第二盘面抓取组件6处,将第二盘面2置于轴心结构3上;
S4,旋转工作台面4使得组装位移动至固定组件8处,通过固定组件8将第一盘面1、第二盘面2以及轴心结构3进行固定,形成灯带卷盘;
S5,通过卷盘抓取组件9将灯带卷盘移动至流水线。
其中,根据对应灯带的厚度匹配不同数量的轴心片;
在具体实施例中,通过固定组件8将第一盘面1、第二盘面2以及轴心结构3进行固定,具体为:通过上固定单元的气钉枪83从第二盘面2的上方进行打钉,打钉完成后上固定单元的气钉枪83持续按压第一盘面1,同时下固定单元的气钉枪83从第一盘面1的下方进行打钉。
通过第一盘面抓取组件5将第一盘面1置于工作台面4的组装位上,具体为:将第一盘面置于第一物料仓54上,第一物料仓54上升至第一盘面1与工作台面4齐平的位置;之后在电机的驱动下使得第一水平机械臂51带动第一竖直机械臂52通过第一吸盘53(或者机械手拾取方式)拾取第一盘面1,此时第一吸盘53吸住第一盘面1;之后在电机的驱动下向上移动第一盘面抓取组件5到限位点;之后再将第一吸盘53向下移动至定位柱41的正上方,第一吸盘53松开,即可将第一盘面1放置于定位柱41上。
通过轴心片抓取组件7将轴心结构3置于第一盘面1上,具体为:轴心片由人工进行上料,将其置于第三物料仓74上,第三物料仓74上升至轴心片与工作台面4齐平的位置;之后在电机的驱动下使得第三水平机械臂71带动第三竖直机械臂72通过机械手73拾取轴心片,此时机械手73抓住轴心片;之后在电机的驱动下向上移动轴心片抓取组件7到限位点;之后再将机械手73向下移动至定位柱41的正上方,机械手73松开,即可将轴心片放置于定位柱41上。
将第二盘面2置于轴心结构3上,具体为:第二盘面2由人工进行上料,将其置于第二物料仓64上,第二物料仓64上升至第二盘面2与工作台面4齐平的位置;之后在电机的驱动下使得第二水平机械臂61带动第二竖直机械臂62通过第二吸盘63(或者机械手拾取方式)拾取第二盘面2,此时第二吸盘63吸住第二盘面2;之后在电机的驱动下向上移动第二盘面抓取组件6到限位点;之后再将第二吸盘63向下移动至定位柱41的正上方,第二吸盘63松开,即可将第二盘面2放置于定位柱41上。
本实施例提供的灯带卷盘制造方法在在通过轴心片抓取组件将轴心结构置于第一盘面上时,根据对应灯带的厚度匹配不同数量的轴心片,以达到轴心结构任意宽度的需求;并且整个过程自动化程度高,不需要操作工人过多的进行干涉,提高了制造的效率。
综上,本领域技术人员容易理解的是,在不冲突的前提下,上述各有利技术特征可以自由地组合、叠加。
以上,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 一种适用于学校机房的带LED指示灯计算机考试防U盘作弊的设备
- 一种带LED指示灯的计算机考试防U盘作弊设备
- 一种可折叠的带LED指示灯计算机考试防U盘作弊的设备
- 一种带LED指示灯的计算机考试防U盘作弊装置
- LED软灯带半自动化卷盘机及其卷盘方法
- 一种节能灯灯带自动收卷卷盘