一种面向智能行为识别的三维人体运动特征表达方法
文献发布时间:2023-06-19 18:34:06
技术领域
本申请涉及计算机视觉中人体行为的快速识别领域,尤其涉及一种面向智能行为识别的三维人体运动特征表达方法。
背景技术
近年来,人工智能技术与制造技术不断地深度融合发展,使得制造业的生产模式发生了深刻的变革,智能制造的发展正处于重要的战略转型时期。制造是人类运用工具将原材料转化为能够满足生产生活需要的产品和服务的过程,智能制造的发展有效增强了生产活动的效率和质量。时至今日,人仍然是生产活动中最具自主性、创造性、可感知性的因素,并将在下一代智能制造过程中的自主决策过程中发挥更大的作用。如何精确获取技术人员在工厂内的行动轨迹或行为姿态,从而实现以人为本的智能制造系统的构建,是当下智能制造领域的主要的研究目标和发展方向。
为实现上述目标,核心问题是如何让计算机系统准确理解人的行为。目前,主流的方法是人体行为识别技术。在该研究领域内,部分学者使用传统手工特征或深度学习的方法能在一定的限制条件下实现良好的识别结果,但准确率有待提升。大多数方法输入的结构化数据均为人体关节点的三维坐标,通过将这些坐标信息转换成向量或是矩阵输入到神经网络中进行学习、迭代,最终得到神经网络模型的参数值。依赖于神经网络强大的学习能力和特征提取能力,这样的运行模式在复杂程度较低的行为动作数据集上的确能够取得一定的效果。但不可否认的是,这样的方式没有充分挖掘关节的内在联系以及自由度特征,当行为趋于复杂时神经网络模型容易产生过拟合。
发明内容
本申请提供了一种面向智能行为识别的三维人体运动特征表达方法,其技术目的是基于骨架机构的最小自由度原则,构建一种精炼的关节特征,在保证特征构建全面性的前提下,消除人体关节特征的冗余,实现在能够完全区分所有的人员行为的基础上,使关节特征的复杂度达到最小,以支撑基于计算机视觉的人体行为识别深度学习模型的快速构建。
本申请的上述技术目的是通过以下技术方案得以实现的:
一种面向智能行为识别的三维人体运动特征表达方法,包括:
通过深度视觉传感器获取人体骨架模型的坐标数据;
对所述人体骨架模型进行分区,对各分区中的每个关节点和骨架的数学指代形式进行制定,再对每个关节点进行自由度分析;
对每个关节点进行坐标系建立,依据所述自由度分析的结果计算每个关节点的位移特征、姿态角特征、自旋角特征和夹角特征;
将所述位移特征、姿态角特征、自旋角特征和夹角特征进行汇总以实现三维人体运动特征的表达。
本申请的有益效果在于:
(1)本申请提出了一种面向智能行为识别的三维人体运动特征表达方法,与传统坐标特征75维的数据量相比,该三维人体运动特征仅需要36维的数据,但同样能够详细的描述人体的运动姿态。
(2)本申请提出的三维人体运动特征在用于计算机视觉的人体行为识别工程时,其数据结构更加精炼、运算速度更加快捷,为实现高速、准确的数字孪生技术提供了相应的基础。
(3)本申请的方法从关节约束、自由度等机械领域的概念出发,将人体视作高精密、具有复杂自由度的器械,并着眼于角度等无法由深度网络提取的高级特征,来进行特征模型的构建,为人体数字孪生模型的无损描述、数字-物理模型的快速转换提供了理论基础。
附图说明
图1为本申请所述方法中三维人体运动特征的计算流程图;
图2为本申请中人体骨架模型的示意图;
图3为本申请具体实施例中关节点J
图4为本申请具体实施例中关节点J
图5为本申请具体实施例中关节点J
具体实施方式
下面将结合附图对本申请技术方案进行详细说明。
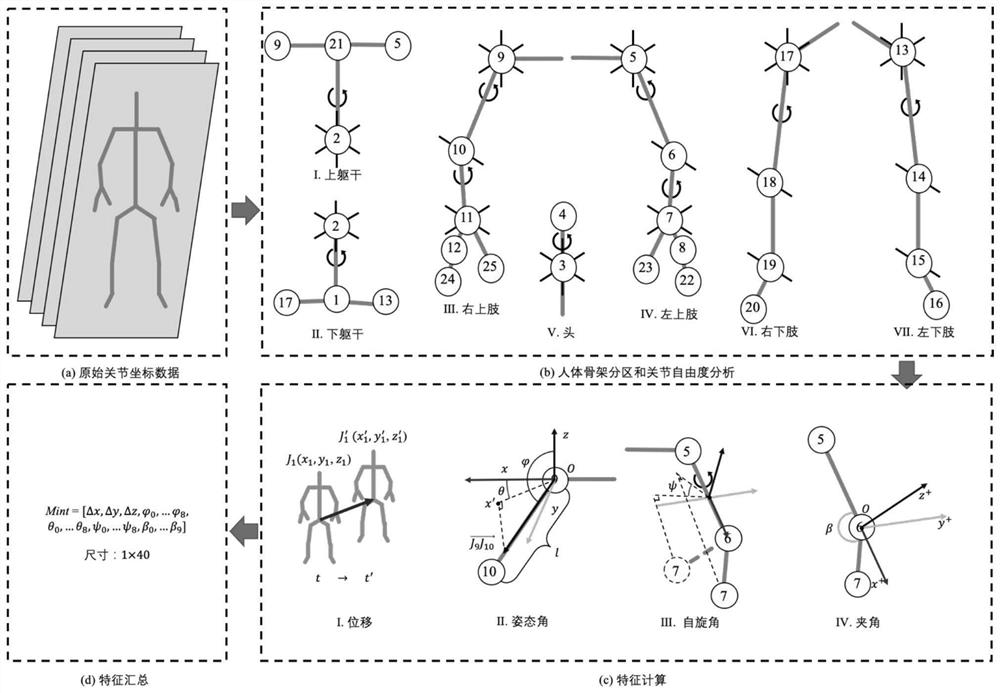
如图1所示,本申请所述的面向智能行为识别的三维人体运动特征表达方法,包括:
S1:通过深度视觉传感器获取人体骨架模型的坐标数据。
具体地,人体骨架模型的坐标数据包括25个关节点的三维空间坐标,该25个关节点包括骨盆J
S2:对所述人体骨架模型进行分区,对各分区中的每个关节点和骨架的数学指代形式进行制定,再对每个关节点进行自由度分析。
具体地,对所述人体骨架模型进行分区,是将人体分为头、左上肢、右上肢、左下肢、右下肢、上躯干、下躯干这七个分区。每个关节点的数学指代形式为J
分析每个关节点的自由度,关节点的自由度不同,对应的描述特征也不同。例如,有3个转动自由度的关节点,则需要2个姿态角加1个自旋角来表述;有3个平动自由度的关节点则需要用3个位移特征来表述;有1个转动自由度的关节点,则用一个夹角来表述。
对每个关节点的平动自由度和转动自由度进行计算;其中,所述平动自由度通过笛卡尔坐标系中的绝对坐标(即位移特征)进行表征,所述转动自由度通过刚体的姿态角特征和自旋角特征进行表征;所述姿态角特征为二维角度特征,表示为
关于自由度分析的结果
S3:对每个关节点进行坐标系建立,依据所述自由度分析的结果计算每个关节点的位移特征、姿态角特征、自旋角特征和夹角特征。
其中,每个关节点的坐标系建立,例如以关节点J
表1人体关节点对照表
所述位移特征表示关节点J
所述姿态角特征
(1)计算骨架向量
其中,
(2)计算骨架向量
其中,
以关节点左肩J
其中,
左大臂骨架
其中,
全部骨架向量的姿态角的关节点汇总如表2所示,表中RHR表示右手定则(RightHand Rule),表示该轴的方向由右手定则来确定。
表2包含姿态角的关节点汇总
所述自旋角特征的计算包括:
构建骨架向量
构建骨架向量
将CS
其中,
将外积
其中,
计算骨架向量
其中,
以关节点左肩J
表3包含自旋角的关节点汇总
所述夹角特征的计算包括:
构建以关节点J
以左手肘关节点J
计算骨架向量
表4包含夹角的关节点汇总
S4:将所述位移特征、姿态角特征、自旋角特征和夹角特征进行汇总以实现三维人体运动特征的表达。
具体地,所述三维人体运动特征表示为:
其中,
以上为本申请示范性实施例,本申请的保护范围由权利要求书及其等效物限定。
- 面向可穿戴设备的超图特征融合和集成学习的人体行为识别方法
- 面向可穿戴设备的超图特征融合和集成学习的人体行为识别方法