一种基于雨团匹配的空间后处理方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明属于数据处理技术领域,具体是一种基于雨团匹配的空间后处理方法。
背景技术
目前,数值预报后处理技术以统计后处理技术为主。统计后处理技术通过调整各个地区预报值的大小,使得预报结果在各种统计量上与实际情况更为接近。常见的统计后处理技术分为参数化法和非参数化法。参数化方法通过选择对应的预测分布的参数化模型,然后通过回归方程对预测变量进行订正,从而订正系统误差。所选取的参数化模型大多根据以往的模式输出或是历史观测资料进行计算得到。非参数化方法通过构造预测分布的近似进行订正,不包含参数化模型的建构。
而在连续雨区等空间检验技术表明,现有的数值预报往往存在降水区域的空间偏差,而现有的统计后处理技术一般并不涉及到数值预报的空间误差订正。比如,当我们采用常用的统计参数TS评分去评估降水预报结果的好坏时,这样的空间误差往往会产生双惩罚现象,导致TS评分较低。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一;为此,本发明提出了一种基于雨团匹配的空间后处理方法。
一种基于雨团匹配的空间后处理方法,包括:
步骤St1:模式和实况雨团的识别与拆分:基于降水率数据识别出连续降水区域,并将连续降水区域识别为原始雨团;
步骤St2:模式和实况雨团的匹配:通过结合原始雨团的降水核心位置和雨团面积,采取多目标匹配的贝叶斯算法进行雨团间的匹配,获取后验概率;
步骤St3:模式相较于实况的误差计算:对各后验概率的删选后,在同一匹配组内,根据模式和实况降水核心位置的坐标偏移量计算位移误差、根据模式和实况降水率计算降水率误差,再结合各匹配组内原始雨团格点数采用加权平均的方法获得模式与实况的误差;
步骤St4:未知时次模式误差订正:采用相邻已知时次的误差来订正未知时次的模式降水率;
步骤St5:评估订正效果:结合TS评分、实况和模式的协方差、实况和模式的方差、实况值、模式值之间的关系综合评估。
进一步地,所述步骤St1中,获取原始雨团的方法为:
步骤St11:输入模式或实况任一时次的降水率数据,带入高斯卷积核对降水率数据进行滤波,得到平滑后的降水率数据;
步骤St12:通过设定降水率阈值,识别出降水区域,并将连续的降水区域识别为原始雨团。
进一步地,所述步骤St12中:
若原始雨团中出现的降水核心区域不止一个,则按照最大梯度法对其进行拆分,得到仅包含单个降水核心区的原始雨团。
进一步地,所述步骤St2采取多目标匹配的贝叶斯算法进行雨团间的匹配方法为:
步骤St21:获取单个降水核心的原始雨团,并计算出降水核心位置和雨团面积;
考虑到模式和实况雨团往往不存在形态上的相似性,因此仅仅通过核心位置和面积进行雨团间的匹配;雨团间可能会存在一对一匹配、一对多匹配和多对多匹配的情况,这里采取多目标匹配的贝叶斯算法进行匹配;
步骤St22:对于任一模式雨团,计算没有任何实况雨团与它匹配的概率,以及每一个实况雨团与它匹配上的概率;将匹配的概率标记为后验概率,具体公式为:
其中,Pi0为原始雨团i无法匹配上其他原始雨团的概率,S为该原始雨团的格点数,Smin为所有原始雨团中面积最小的原始雨团所占格点数,Smax为所有原始雨团中面积最大原始雨团的格点数,P1为面积最小的原始雨团无法匹配上的概率,σ1为方差;Pij为原始雨团i和j互相匹配的概率,Si和Sj为两个原始雨团各自的格点数,(xi,yi)、(xj,yj)、为两个原始雨团对流核心处的格点坐标,P2为两个原始雨团重合时匹配上的概率,σ2为方差;
步骤St23:采用步骤St22原理对于任一实况原始雨团进行后验概率计算;
步骤St24:后验概率最大的一组事件则视为是真实的雨团匹配情况。
进一步地,所述步骤St21雨团面积用格点数代替。
进一步地,所述步骤St3中,模式相较于实况的误差计算方法为:
步骤St31:将一个后验概率对应的模式和实况原始雨团作为一个匹配组;
同一个匹配组中,模式雨团相较于实况雨团的误差则是该区域内模式与实况的误差;
步骤St32:舍弃掉格点数相差4倍及以上的匹配组;
步骤St33:计算出每个匹配组内原始雨团按照面积加权平均后的降水核心位置与平均降水率;
步骤St34:同一匹配组内,实况降水核心位置与模式降水核心位置的坐标偏移量为位移误差,降水率误差为实况平均降水率除以模式平均降水率;
步骤St35:根据各个匹配组计算出的误差和匹配组内模式原始雨团格点数,采用加权平均的方法得到最终的模式与实况的误差。
进一步地,所述步骤St4中未知时次模式误差订正的算法为:
步骤St41:将计算得到的相邻已知时次的模式相较于实况的误差带入未知时次模式中:
步骤St42:通过已知时次的位移误差对未知时次的降水率数据进行“平移”;
步骤St43:降水率修正误差为已知时次的实况降水率除以模式降水率,用未知时次经过上一步位移订正后得到的降水率乘以降水率修正误差得到的降水率即为订正后的降水率。
进一步地,所述步骤St4中:
相邻时次的误差较为相近,可以用相邻已知时次的误差来订正未知时次的模式降水率,使得未知时次的模式降水率与实况更为接近;
在进行订正时,选取更大范围内的数据,避免由于位移订正造成的数据缺失;
引入质量控制参数,将匹配的模式格点数较少的模式视为不适用于本算法。
进一步地,所述步骤St5中评估订正效果的方法为:
根据TS评分、相关系数(R)、平均绝对误差(MAE)对订正前后降水率进行对比验证,评估订正效果,具体公式为:
式中,H为模式预报且实况观测到的格点数,F为模式预报但实况未观测到的格点数,O为实况观测到但未预报的格点数;x为实况降水率,
进一步地,所述降水率数据获取后,还进行预处理:将模式降水率数据和实况降水率数据分辨率均处理为6小时0.5°格点。
与现有技术相比,本发明的有益效果是:
现有的降水预报更多基于降水率大小进行订正,本发明对降水预报进行了空间订正,解决了降水预报存在空间偏差的问题;不依赖于历史数据,而是基于相邻时次的实况降水率,对极端降水事件有更好的订正能力;该算法和统计后处理算法具有较好的相容性,经过本算法订正后的模式数据能作为类似于集合预报子模式的输入量,进一步应用于集合预报与其他后处理算法中。
附图说明
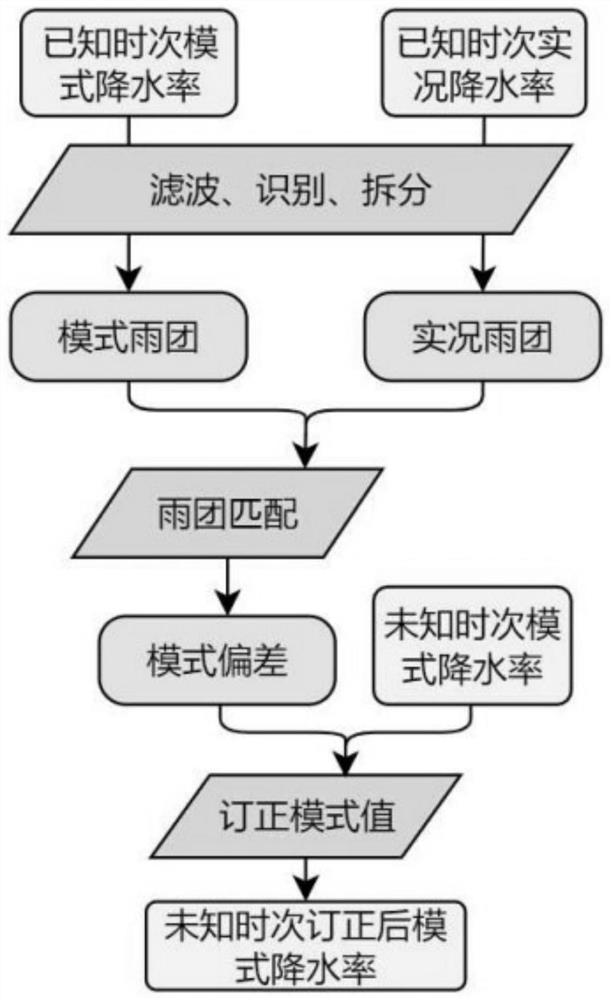
图1为本发明基于雨团匹配的空间后处理方法的流程图;
图2为实施例中的雨团示意图;
图3为进行匹配概率计算时的参数表;
图4为订正前后的统计结果。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例一:
本申请通过雨团匹配计算出已知时次的模式相较于实况的空间和降水量大小误差,并用于订正未知时次的误差,能较好解决降水区域的位置偏差。
具体流程图如图1所示,本申请提供了一种基于雨团匹配的空间后处理方法,该方法具体包括如下步骤:
步骤St1:模式和实况雨团的识别与拆分:基于降水率数据识别出连续降水区域,并将连续降水区域识别为原始雨团;
步骤St2:模式和实况雨团的匹配:通过结合原始雨团的降水核心位置和雨团面积,采取多目标匹配的贝叶斯算法进行雨团间的匹配,获取后验概率;
步骤St3:模式相较于实况的误差计算:对各后验概率的删选后,在同一匹配组内,根据模式和实况降水核心位置的坐标偏移量计算位移误差、根据模式和实况降水率计算降水率误差,再结合各匹配组内原始雨团格点数采用加权平均的方法获得模式与实况的误差;
步骤St4:未知时次模式误差订正:采用相邻已知时次的误差来订正未知时次的模式降水率;
步骤St5:评估订正效果:结合TS评分、实况和模式的协方差、实况和模式的方差、实况值、模式值之间的关系综合评估。
实施例二:
本发明采用的模式降水率数据来源于欧洲中心(ECMWF)集合预测系统的降水产品,每个时次包含51个子模式,每个子模式均对应着一个模式降水率数据,数据时空分辨率为6小时0.5°格点;实况降水率数据来源于国家气象中心开发的多源融合降水产品(CMPAS),数据时空分辨率为1小时0.1°格点。首先对降水率数据进行预处理,使得模式数据和实况数据分辨率一致,都为6小时0.5°格点。
作为本发明提供的一个实施例,优选的,选取了2018-2019年夏季华北地区(110E-120E,32N-42N)及其周围2°范围有降水事件的案例进行分析,包含了23次降水事件及其对应的模式与实况降水率数据,所选取范围内的数据处理为29×29的格点。将6-12h(记为12h,以此类推)的累积降水量数据作为已知时次的降水率数据,用于计算偏差(误差);18h、24h、36h、48h数据作为未知时次的数据,用于订正,并检验订正前后的差异。
以2018年8月10日12时的降水事件为例,图2展示了经过该算法订正后,12h(已知时次)与24h(未知时次)的实况降水率与模式降水率数据中第26个子模式(之后用模式26代指)订正前后的降水率分布。其中,图2中上面三个为12h,下面三个为24h;从左到右依次为实况降水、模式降水和订正后模式降水结果。图4展示了23次降水事件、每次降水事件的模式数据中包含的51个子模式订正前后的统计结果,通过了质量控制的子模式共550个,占总数的46.9%。
具体的,通过一种基于雨团匹配的空间后处理方法,该方法具体包括如下步骤:
步骤St1:模式和实况雨团的识别与拆分:作为本发明提供的一个实施例,优选的,所述步骤St1中,获取原始雨团的方法为:
步骤St11:输入模式或实况任一时次的降水率数据,带入高斯卷积核对降水率数据进行滤波,得到平滑后的降水率数据;
步骤St12:通过设定降水率阈值,识别出降水区域,并将连续的降水区域识别为原始雨团;作为本发明提供的一个实施例,优选的,所述步骤St12中:
若原始雨团中出现的降水核心区域不止一个,则按照最大梯度法对其进行拆分,得到仅包含单个降水核心区的原始雨团;
步骤St2:模式和实况雨团的匹配,作为本发明提供的一个实施例,优选的,采取多目标匹配的贝叶斯算法进行雨团间的匹配方法为:
步骤St21:获取单个降水核心的原始雨团,并计算出降水核心位置和雨团面积;
考虑到模式和实况雨团往往不存在形态上的相似性,因此仅仅通过核心位置和面积进行雨团间的匹配;雨团间可能会存在一对一匹配、一对多匹配和多对多匹配的情况,这里采取多目标匹配的贝叶斯算法进行匹配;
步骤St22:模式雨团为例,对于任一模式雨团,计算没有任何实况雨团与它匹配的概率,以及每一个实况雨团与它匹配上的概率;将匹配的概率标记为后验概率,具体公式为:
其中,Pi0为雨团i无法匹配上其他雨团的概率,S为该雨团的格点数,Smin为所有雨团中面积最小的雨团所占格点数,Smax为所有雨团中面积最大雨团的格点数,P1为面积最小的雨团无法匹配上的概率,σ1为方差;Pij为雨团i和j互相匹配的概率,Si和Sj为两个雨团各自的格点数,(xi,yi)、(xj,yj)、为两个雨团对流核心处的格点坐标,P2为两个雨团重合时匹配上的概率,σ2为方差;
作为本发明提供的一个实施例,优选的,P1、P2、σ1、σ2都为预设的常数,属于高斯概率分布的参数,可以通过实际匹配情况进行调整,例如在后面的匹配个例中存在应当匹配上的雨团而未匹配,可以通过调整这几个参数使得它们能够顺利匹配,但同时这些参数的调整也会影响其他个例,因此需要通过不断调整获取合适的值,具体预设参数如附图3所示;
步骤St23:采用步骤St22原理对于任一实况原始雨团进行后验概率计算;
步骤St24:后验概率最大的一组事件则视为是真实的雨团匹配情况;
步骤St3:模式相较于实况的误差计算,作为本发明提供的一个实施例,优选的,所述步骤St3中,模式相较于实况的误差计算方法为:
步骤St31:将一个后验概率对应的模式和实况原始雨团作为一个匹配组;
同一个匹配组中,模式雨团相较于实况雨团的误差则是该区域内模式与实况的误差;
步骤St32:舍弃掉格点数相差4倍及以上的匹配组;
步骤St33:计算出每个匹配组内原始雨团按照面积加权平均后的降水核心位置与平均降水率;
作为本发明提供的一个实施例,优选的,例如同一匹配组内存在两个实况雨团,且核心位置分别为(x1,y1)、(x2,y2),降水率分别为pr1和pr2,面积分别为S1和S2,则按照面积加权平均后的降水核心位置为((S1*x1+S2*x2)/(S1+S2),(S1*y1+S2*y2)/(S1+S2)),降水率为(S1*pr1+S2*pr2)/(S1+S2);
步骤St34:同一匹配组内,实况降水核心位置与模式降水核心位置的坐标偏移量为位移误差,降水率误差为实况平均降水率除以模式平均降水率;作为本发明提供的一个实施例,优选的,同一匹配组内,实况降水核心位置与模式降水核心位置的坐标偏移量为位移误差,即Δx=xi-xj,Δy=yi-yj;降水率误差为实况平均降水率除以模式平均降水率,即k=Si/Sj;
步骤St35:而后,根据各个匹配组计算出的误差和匹配组内模式原始雨团格点数,采用加权平均的方法得到最终的模式与实况的误差;
作为本发明提供的一个实施例,优选的,例如,该实施例中存在两个匹配组,且位移误差分别为向东平移Δx1与向北平移Δy1、向东平移Δx2与向北平移Δy2,降水率误差分别为k1和k2,面积分别为S1和S2,则按照面积加权平均后的位移误差为向东平移(S1*Δx1+S2*Δx2)/(S1+S2)与向北平移(S1*Δy1+S2*Δy2)/(S1+S2),降水率误差为(S1*k1+S2*k2)/(S1+S2);
步骤St4:未知时次模式误差订正,作为本发明提供的一个实施例,优选的,未知时次模式误差订正的算法为:
步骤St41:将计算得到的相邻已知时次的模式相较于实况的误差带入未知时次模式中:
步骤St42:通过已知时次的位移误差对未知时次的降水率数据进行“平移”;
作为本发明提供的一个实施例,优选的,对未知时次的降水率数据进行“平移”的方法为:例如已经计算出已知时次的位移误差为向东平移Δx、向北平移Δy,则未知时次经过位移订正后(xi,yi)位置处的降水率为原始未知时次(xi-Δx,yi-Δy)处的降水率;
步骤St43:降水率修正误差为已知时次的实况降水率除以模式降水率,用未知时次经过上一步位移订正后得到的降水率乘以降水率修正误差得到的降水率即为订正后的降水率;
步骤St5:评估订正效果,作为本发明提供的一个实施例,优选的,所述步骤St5中评估订正效果的方法为:
根据TS评分、相关系数(R)、平均绝对误差(MAE)对订正前后降水率进行对比验证,评估订正效果,具体公式为:
式中,H为模式预报且实况观测到的格点数,F为模式预报但实况未观测到的格点数,O为实况观测到但未预报的格点数;x为实况降水率,
作为本发明提供的一个实施例,优选的,所述步骤St21雨团面积用格点数代替。
作为本发明提供的一个实施例,优选的,所述步骤St4中:
相邻时次的误差较为相近,可以用相邻已知时次的误差来订正未知时次的模式降水率,使得未知时次的模式降水率与实况更为接近;
在进行订正时,选取更大范围内的数据,避免由于位移订正造成的数据缺失;具体选取范围如何扩大依需求而定;
作为本发明提供的一个实施例,优选的,例如需要订正的经纬度范围为(110E-120E,32N-42N),选取数据的范围为(108E-122E,30N-44N)。
引入质量控制参数,将匹配的模式格点数较少的模式视为不适用于本算法。
作为本发明提供的一个实施例,优选的,例如匹配的模式格点数少于总格点数1/10的模式视为订正质量较差的模式,这部分模式视为不适用于所述算法,不参与之后的统计。
本发明通过雨团匹配计算出已知时次的模式相较于实况的空间和降水量大小误差,并用于订正未知时次的误差,能较好解决降水区域的位置偏差。现有的降水预报更多基于降水率大小进行订正,本发明对降水预报进行了空间订正,解决了降水预报存在空间偏差的问题;不依赖于历史数据,而是基于相邻时次的实况降水率,对极端降水事件有更好的订正能力;该算法和统计后处理算法具有较好的相容性,经过本算法订正后的模式数据能作为类似于集合预报子模式的输入量,进一步应用于集合预报与其他后处理算法中。
更为优选的,本发明认为对雨团进行拆分能获得更好的订正结果,但在实际应用中也可以不进行雨团的拆分,同样能达成目的;本发明认为匹配时不需要考虑雨团的形态等因素,因为模式和实况雨团往往并不存在这种形态上的相似,在实际应用中也可以进行考虑;本发明进行雨团订正时采用的是雨团极值点作为雨团位置的代表,目的是为了让降水高值区获得更好的订正,实际应用中可以用质心、图形中心等代替;本发明未采用面积重叠率等追踪方法进行雨团匹配,实际应用中可以将贝叶斯多目标追踪法换成这些方法。
上述公式中的部分数据均是去除量纲取其数值计算,公式是由采集的大量数据经过软件模拟得到最接近真实情况的一个公式;公式中的预设参数和预设阈值由本领域的技术人员根据实际情况设定或者通过大量数据模拟获得。
以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。