一种铁氧体移相器的驱动方法
文献发布时间:2023-06-19 18:34:06
技术领域
本申请涉及微波器件驱动控制的领域,尤其是涉及一种铁氧体移相器的驱动方法。
背景技术
相控阵雷达由数量众多的辐射单元组成,这些辐射单元数量从数十到数千不等,每个辐射单元的辐射能量和相位都可以通过驱动信号独立控制,从而形成多个独立控制的波束,实现波束在空间扫描。移相器是无源相控阵雷达的关键器件之一,在无源相控阵雷达工作时,波控机通过发送驱动信号对铁氧体移相器相位进行控制,从而实现对波束的控制,进而完成对目标的搜索。移相器的相位转换时间影响着雷达系统的波束切换速度;移相器的相移精度,影响雷达系统对目标跟踪定位的精度;移相器的驱动功耗过高,除了会增加雷达天线系统的供电负担,还会增加移相器的温升,带来散热问题,提高天线红外特征,降低雷达隐身特性。设计优异的驱动信号,用更低的驱动功耗来保证移相器转换时间和相移精度,具有重要的意义。
铁氧体移相器大多采用复位-置位和固定脉宽全置位-复位-新的置位的驱动方法。
如图1为复位-置位的驱动方法,图2为复位-置位驱动信号示意图。如图1中,移相器工作时,驱动信号先加一个反向饱和激励电流(复位信号),产生反向磁场使得使铁氧体从原来的剩磁态1反向磁化至饱和状态2,当反向饱和激励电流去掉后,铁氧体就回复到最大剩磁点,即全复位状态3,使移相器产生与驱动器的0位态对应的插入相位,作为置位的参考点。然后再施加一个大小与波控码相对应的正向激励电流(置位信号),使铁氧体磁化到置位状态4,当正向激励电流去掉后,铁氧体就回复到新的置位剩磁点5,剩磁点5相对于0位态置位参考点(状态3)的相位改变,就是与当前波控码相对应的相移量。
该方法缺点:由于磁滞效应存在,磁感应强度(B)变化滞后于磁场强度(H)。导致从不同剩磁态进行复位时,反向饱和驱动电流去掉后,铁氧体不能稳定回复至最大剩磁点(图1中状态3所示)。导致移相器0位态置位参考点不稳定,影响移相器的相移精度。
如图3为固定脉宽全置位-复位-新的置位的驱动方法,图4为固定脉宽全置位-复位-新的置位的驱动信号示意图。移相器工作时,如图3所示,铁氧体由初始剩磁点1加一个固定脉宽的正向的激励电流(固定脉宽全置位信号),使得铁氧体正向磁化至饱和状态2,当正向饱和激励电流去掉后,铁氧体就回复到最大剩磁点3。然后再加一个反向饱和激励电流(复位信号),使铁氧体从最大剩磁点3方向磁化至饱和状态4,当反向饱和激励电流去掉后,铁氧体就回复到最大剩磁点5,再加正向激励电流(新的置位信号),使得铁氧体正向激励到置位状态6,当正向电流去掉后,铁氧体就回复到了新的剩磁点7。剩磁点7相对于0位态置位参考点(状态5)的相位改变,就是与当前波控码相对应的相移量。
该方法缺点:如图3所示,固定脉宽全置位信号需保证铁氧体在任意初始剩磁点1均能正向磁化至饱和状态2,才能保证移相器的相移精度。而从剩磁点5磁化至饱和状态2需要的脉宽最宽,固定脉宽全置位信号始终工作在最宽脉宽状态,当从反向饱和剩磁点5以外的状态磁化至饱和状态2时,铁氧体会过早磁化饱和,导致驱动电流急剧增大,进而导致驱动功耗增加,功耗比复位-置位的驱动方法增加约一倍。
发明内容
有鉴于此,本申请提供一种铁氧体移相器的驱动方法,解决了现有技术中的问题,提高驱动方法中相移精度,降低驱动功耗,提升移相器乃至雷达系统的性能。
本申请提供的一种铁氧体移相器的驱动方法采用如下的技术方案:
一种铁氧体移相器的驱动方法,包括铁氧体由初始剩磁状态一加一个可变脉宽的正向置位信号,将铁氧体磁化至剩磁状态二;去掉正向置位信号,铁氧体回复至剩磁状态三,再加一个反向饱和复位信号,使铁氧体从剩磁状态三反向磁化至饱和状态四,去掉反向饱和复位信号,铁氧体就回复到最大剩磁状态五,再加正向新的置位信号,使得铁氧体正向激励到置位状态六,去掉正向新的置位信号,铁氧体就磁化至新的剩磁状态七。
可选的,可变脉宽置位信号宽度根据上一拍置位宽度设置。
可选的,可变脉宽置位信号宽度为最大置位脉宽减去上一拍的置位宽度:
t
其中,T
可选的,可变脉宽的正向置位信号将铁氧体磁化至最大置位脉宽状态。
可选的,最大置位脉宽状态并未将铁氧体磁化到饱和状态。
可选的,反向饱和复位信号的脉宽T
可选的,正向新的置位信号的脉宽t
综上所述,本申请包括以下有益技术效果:
相移误差小,移相器相移误差:≤3°,与固定脉宽全置位-复位-新的置位的驱动方法一致;优于复位-置位驱动方法的相移误差:≤15°。
驱动功耗比固定脉宽全置位-复位-新的置位的驱动方法减小50%。
本申请设计的驱动方法可广泛应用于各种铁氧体移相器的控制,也可应用于铁氧体变极化器或其它变动场铁氧体器件的控制。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
图1为复位-置位的驱动方法;
图2为复位-置位驱动信号示意图;
图3为固定脉宽全置位-复位-新的置位的驱动方法;
图4为固定脉宽全置位-复位-新的置位的驱动信号示意图;
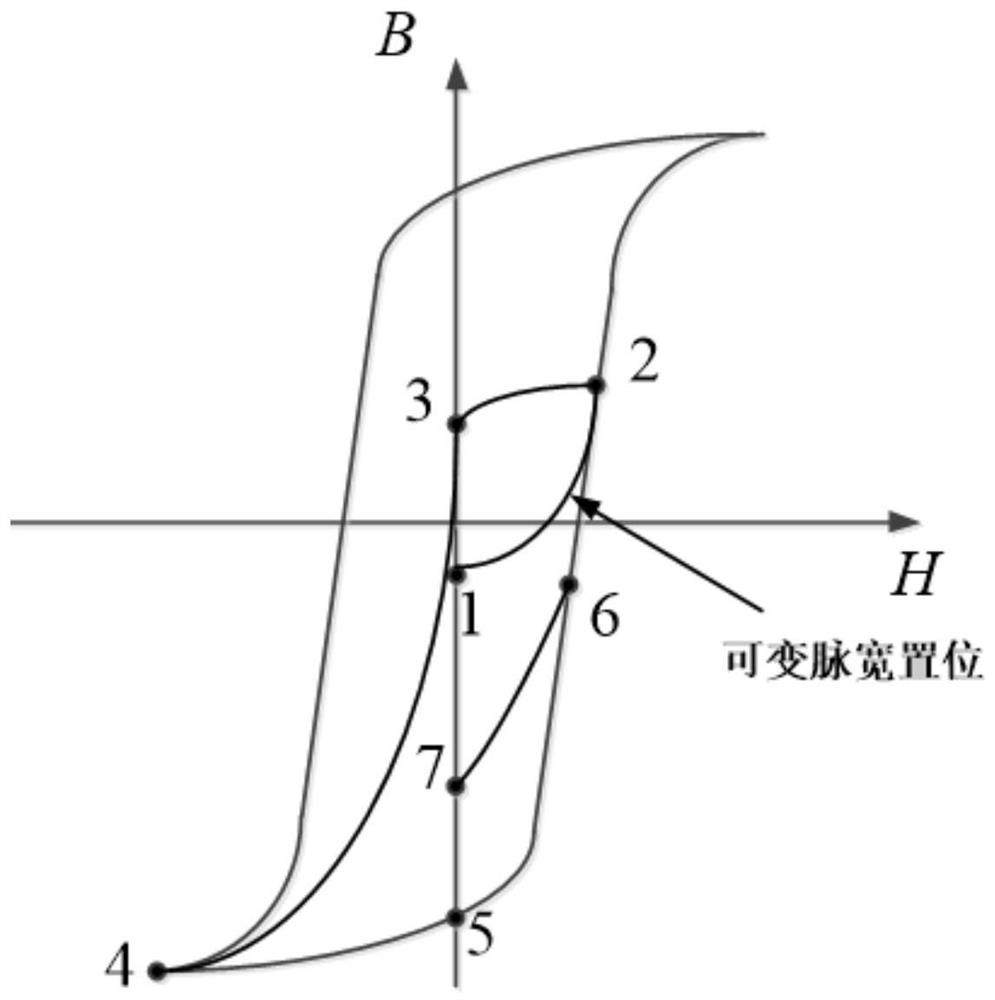
图5为本申请可变脉宽置位-复位-新的置位的驱动方法;
图6为本申请可变脉宽置位-复位-新的置位的驱动信号示意图。
具体实施方式
下面结合附图对本申请实施例进行详细描述。
以下通过特定的具体实例说明本申请的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本申请的其他优点与功效。显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。本申请还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本申请的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
要说明的是,下文描述在所附权利要求书的范围内的实施例的各种方面。应显而易见,本文中所描述的方面可体现于广泛多种形式中,且本文中所描述的任何特定结构及/或功能仅为说明性的。基于本申请,所属领域的技术人员应了解,本文中所描述的一个方面可与任何其它方面独立地实施,且可以各种方式组合这些方面中的两者或两者以上。举例来说,可使用本文中所阐述的任何数目个方面来实施设备及/或实践方法。另外,可使用除了本文中所阐述的方面中的一或多者之外的其它结构及/或功能性实施此设备及/或实践此方法。
还需要说明的是,以下实施例中所提供的图示仅以示意方式说明本申请的基本构想,图式中仅显示与本申请中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
另外,在以下描述中,提供具体细节是为了便于透彻理解实例。然而,所属领域的技术人员将理解,可在没有这些特定细节的情况下实践所述方面。
本申请实施例提供一种铁氧体移相器的驱动方法。
如图5所示,一种铁氧体移相器的驱动方法,包括铁氧体由初始剩磁状态一(对应图中数字1)加一个可变脉宽的正向置位信号,将铁氧体磁化至剩磁状态二(对应图中数字2);去掉正向置位信号,铁氧体回复至剩磁状态三(对应图中数字3),再加一个反向饱和复位信号,使铁氧体从剩磁状态三反向磁化至饱和状态四(对应图中数字4),去掉反向饱和复位信号,铁氧体就回复到最大剩磁状态五(对应图中数字5),再加正向新的置位信号,使得铁氧体正向激励到置位状态六(对应图中数字6),去掉正向新的置位信号,铁氧体就磁化至新的剩磁状态七(对应图中数字7)。
可变脉宽置位信号宽度根据上一拍置位宽度设置。
可变脉宽置位信号宽度为最大置位脉宽减去上一拍的置位宽度:
t
其中,T
可变脉宽的正向置位信号将铁氧体磁化至最大置位脉宽状态。
反向饱和复位信号的脉宽T
正向新的置位信号的脉宽t
移相器工作时,铁氧体由初始剩磁点状态一加一个可变脉宽的正向的激励电流(可变脉宽置位信号),将铁氧体磁化至状态二。可变脉宽置位信号宽度由上一拍置位宽度决定。可变脉宽置位信号宽度经过精心设计,产生的正向激励电流并不是饱和磁化电流,但也可以保证移相器的相移精度。当正向激励电流去掉后,铁氧体就回复到剩磁状态三。然后再加一个反向饱和激励电流(复位信号),使铁氧体从剩磁状态三反向磁化至饱和状态四,当反向饱和激励电流去掉后,铁氧体就回复到最大剩磁状态五,再加正向激励电流(新的置位信号),使得铁氧体正向激励到置位状态六,当正向电流去掉后,铁氧体就回复到了新的剩磁状态七。剩磁点七相对于0位态置位参考点(最大剩磁状态五)的相位改变,就是与当前波控码相对应的相移量。
不同于固定脉宽全置位-复位-新的置位的驱动方法,本发明提及的方法在从任意初始剩磁状态一磁化至状态二过程中,无需将铁氧体磁化至饱和,而且铁氧体的特性决定了,磁化铁氧体越接近饱和,所需能量越大。本发明达到和固定脉宽全置位-复位-新的置位的驱动方法相同相移精度所需功耗降低了50%。
如图6为可变脉宽置位-复位-新的置位的驱动信号示意图。第一次置位从零时刻开始,采用可变脉宽以降低驱动功耗,宽度由上一拍置位宽度决定,具体宽度为最大置位脉宽(最大置位脉宽是指将移相器从0位态置位参考点即最大剩磁点五磁化到所需要的最大相移量即剩磁点三所需的脉宽,远远没有达到饱和磁化)减去上一拍的置位宽度。设最大置位脉宽为T
t
其中N
t
采用本发明的移相器驱动方法,功耗与传统的复位-置位驱动方法中持续工作在最大相移状态时功耗一致,仅相当于固定脉宽全置位-复位-新的置位的驱动方法功耗的一半,精度却与之相当,具有重要的应用价值,已在某批产型号雷达上应用。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以权利要求的保护范围为准。
- 一种用于互易铁氧体移相器的圆极化器装配测试方法
- 一种降低无源数字移相器驱动电路驱动功率的方法
- 一种用于移相器的铁氧体孔道加工装置
- 一种铁氧体移相器驱动控制方法
- 一种铁氧体移相器驱动控制方法