一种基于云计算的教学实训平台
文献发布时间:2023-06-19 19:00:17
技术领域
本发明属于实践教学技术领域,具体的说是一种基于云计算的教学实训平台。
背景技术
实践教学是高职人才培养体系的重要组成部分,通常是指有计划地组织学生直接从事实际操作的一种教学活动。普通高等院校的实践教学基本上都依据专业教学计划来组织教学工作,实践教学环节主要包括实验和课程实习等。其中,实验大多是结合理论课程开设的,而实验课也只是在教学计划规定的时间内进行。实验方式大多是由教师先讲,学生按照教师的布置或者指导书上的步骤,按部就班,完成实验操作。学生虽然也参与了实验教学活动,但实质上是处于被动接受的状态,他们学习的主动性、积极性受到一定的限制。在这种模式下,虽然也强调实验能力的培养,但这种实验能力是被当作技能并以“知识”的形式加以传授,从而导致学生缺乏“创造性”应用能力的培养。课程实习是结合某一门课程而进行的,由于受到时间、场地和经费等限制,多数情况下只能走马观花,结合课堂教学写实习的感想、见闻、体会,完成实习报告,评定实习成绩就算完成课程实习
并且,在特殊情况下,学生的日常上课时间受到很大影响,对于传统机械专业的理工科而言,实训实操的减少无意减少了大学生就业前的实操经验,仅凭书本上的理论知识很大程度上并无法指导学生如何应对实操过程中实际遇到的加工问题。
但随着社会经济模式多元化的发展,用人单位对高校毕业生的实践能力和综合素质要求越来越高,社会对创新型人才的需求越来越强烈,传统的教学模式已难以满足社会对实践能力型人才培养的需要。教育部2012年印发的《教育部等部门关于进一步加强高校实践育人工作的若干意见》指出,各高校要结合专业特点和人才培养要求,增加实践教学比重,确保人文社会科学类本科专业不少于总学分(学时)的15%、理工农医类本科专业不少于25%、高职高专类专业不少于50%,师范类学生教育实践不少于一个学期,专业学位硕士研究生不少于半年的实践要求。
鉴于此,为了克服上述技术问题,本发明设计研发了一种基于云计算的教学实训平台,以解决了上述技术问题。
发明内容
为了弥补现有技术的不足,本发明提出的一种基于云计算的教学实训平台,本发明主要用于解决现有技术理工类学生的实训实操课程因只能在现场完成,因而容易受到环境的约束,导致实操的次数和质量无法得到保证,影响学生将课本理论知识通过实践加以融会贯通的效果。
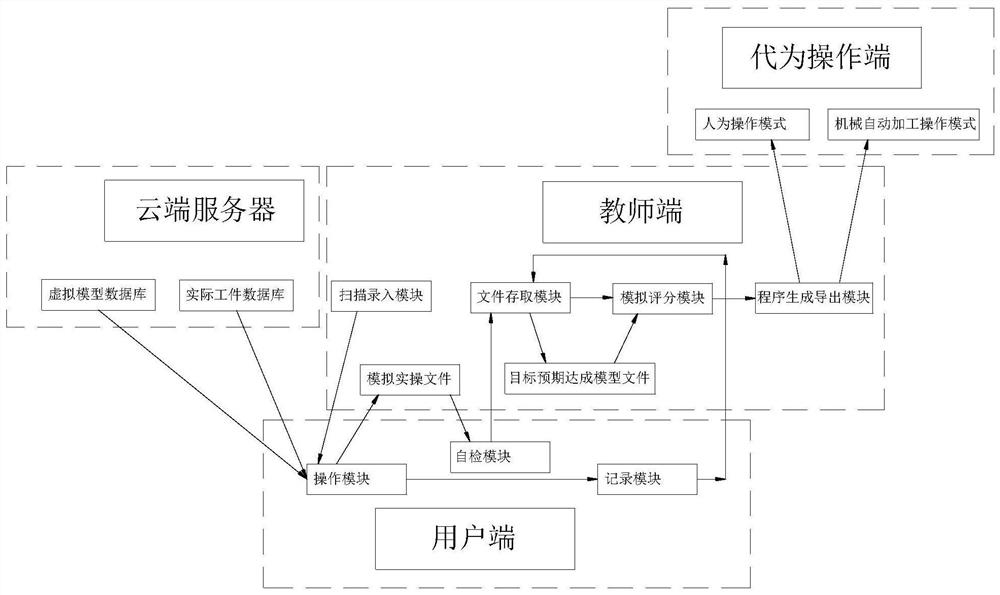
本发明解决其技术问题所采用的技术方案是:本发明所述的一种基于云计算的教学实训平台,包括教师端、云端服务器、用户端,所述教师端与用户端通过云端服务器建立数据传输关系,所述教师端包括文件存取模块、程序生成导出模块、模拟评分模块;
所述文件库模块用于在实操前将目标预期达成模型文件调取下发至用户端,并对用户端模拟实操后提交的模拟实操文件进行保存;
所述程序生成导出模块用于将模拟实操文件生成加工程序或步骤文字,并导入代为操作端进行代为操作;
所述模拟评分模块用于将用户端在模拟实训过程中产生的最终版模拟实操文件与文件库模块提供的目标预期达成模型文件中的各项参数指标数据进行比较,比对用户模拟实操的完成度、相似度和模拟操作时间进行综合打分,分析缺陷,判断实际加工成功率,从而判定是否需要修正或交由程序生成导出模块导出代为操作的所需数据。
所述云端服务器作为文件的中间传输平台,用于降低教师端的文件调取下发负担,减缓网络加载延迟。
优选的,所述云端服务器中具有教师端事先存储的虚拟模型数据库和实际工件数据库;所述虚拟模型数据库包括在用户端界面出现的二维/三维图形图纸、不同尺寸独立/组装的工件立体模型、透视/实体独立/组装的立体模型、模拟安装配合精度要求等数据;所述实际工件数据不同尺寸/重量/材质的独立/组装的立体工件、透视/实体独立/组装的立体工件、实际安装配合精度要求等数据;
所述虚拟模型数据库用于用户端根据下发的实训图纸直接调取所需的工件立体模型按照模拟安装配合精度要求进行组装,从而得到组装的步骤顺序和精度要求的模拟实操文件,在上传至云端服务器,供教师端进行后续操作;
所述实际工件数据库用于自动调取数据来匹配用户从虚拟模型数据库中选取的模型,用实际工件的实际体感代替虚拟模型的各项数据,从而真实化。
优选的,所述用户端包括操作模块、自检模块和记录模块;所述操作模块包括装有模拟软件的移动终端上和/或VR设备,操作模块用于对获取的虚拟工件模型进行模拟拿取并按要求进行组装,且虚拟工件模型在选取后可通过实际工件数据库的实际数据匹配来实现工件模型的真实化,当佩戴VR设备时,利用VR设备的重力反馈和触觉反馈,来进行虚拟场景下的模拟实操加工;所述自检模块用于将用户模拟实操结束后得到的模拟实操文件与目标预期达成模型文件先进行自我分析比对,若发现问题则可以及时改正,减少明显错误文件带来的资源浪费;所述记录模块则在用户端记录用户所有的操作过程,用于实操后的用户回顾学习使用,并将用户端记录用户所有的操作过程及时反馈至教师端,便于教师及时纠正用户模拟操作失误、错误或不知如何操作的问题。
优选的,所述VR设备通过连接移动终端,来调取实际工件数据库中的实际工件数据不同尺寸/重量/材质的独立/组装的立体工件、透视/实体独立/组装的立体工件、实际安装配合精度要求等数据,通过对安装过程中存在的嵌入式零件、内藏零件及插合式进行透视和实体的自由切换,来提高安装精度。
优选的,所述操作模块中所包含的语音系统与教师端中所存在的语音系统存在网联关系,用于在教师端的操作导师根据记录模块记录反馈的实时内容进行语音指导用户的错误行为。
优选的,所述教师端还包括扫描录入模块;所述扫描录入模块用于实现对实训场景进行扫描生成模拟实训环境和所需物品临时性的扫描录入;所述扫描录入模块获得的数据输入教师端内并保存在云端服务器内用于服务用户端,用于增加用户操作的多样性和自由性。
优选的,所述扫描录入模块还用于实时扫描检验代为操作端每道装配工序的精度数据,并将装配精度数据反馈至教师端和用户端,确保操作程序与用户端提交的模拟实操文件生成加工程序或步骤文字相同,降低远程代为实操的准确性。
优选的,所述代为操作端采用人为操作模式或机械自动加工操作模式;所述人为操作模式为将程序生成导出模块将用户提交的最终版模拟实操文件生成步骤文字最为实际加工步骤的指导书,进行现场人工操作演示;所述机械自动加工操作模式为将程序生成导出模块将用户提交的最终版模拟实操文件生成加工程序导入组装或加工机器中,进行机械化自动操作演示。
优选的,所述人为操作模式或机械自动加工操作模式根据用户提交的最终版模拟实操文件生成步骤文字或加工程序所得到的两个版本的实物,均提交至验收导师环节进行验收是否合格。
本发明的有益效果如下:
1.通过本发明的设置,可使得用户在任何地方都可以进行实训操作,且实训结果都可以的到准确的成绩评价,并在确认可以加工的情况加工出事物,从而实现虚拟实训操作但可以得到真实实训产物的效果,为实训解决的场地问题的同时,保证了用户可以尽可能的得到真实的实操经验。
2.本发明考虑到实训实操的种类不同,例如砂模铸造、钳工、焊接、车钻刨磨等工种,分别都涉及图纸、尺寸、材质、加工精度、安装精度的要求,因此,在实训模拟过程中,通过用户端界面(比如:电脑)操作的大多无法直观的体验实操过程中存在重量变化、温度变化、颜色变化等实际情况,因此,本发明通过在虚拟模型数据库的基础上配合实际工件数据库进行使用,当用户端根据下发的实训图纸直接调取所需的工件立体模型按照模拟安装配合精度要求进行组装,从而得到组装的步骤顺序和精度要求的模拟实操文件,在上传至云端服务器,供教师端进行后续操作;而实际工件数据库用于自动调取数据来匹配用户从虚拟模型数据库中选取的模型,用实际工件的实际体感代替虚拟模型的各项数据,从而真实化,而这种真实化的体验更多需要配合用户端包括操作模块中涉及的VR设备来实现,因为对于用户端界面(比如:电脑)而言更多还是存在于二维感官上的视觉变化,通过VR设备的重力反馈和触觉反馈可以在将虚拟模型组合加工过程中触感变化,来使用户真正感受到实际操作的真实感,必然虚拟操作中的失误或错位行为无法为用户带来直观的经验。
附图说明
下面结合附图对本发明作进一步说明。
图1是本发明的工作流程图;
图2是本发明的模块化示意图;
具体实施方式
使用图1-图2对本发明一种实施方式的一种基于云计算的教学实训平台进行如下说明。
如图1-图2所示,本发明解决其技术问题所采用的技术方案是:本发明所述的一种基于云计算的教学实训平台,包括教师端、云端服务器、用户端,所述教师端与用户端通过云端服务器建立数据传输关系,所述教师端包括文件存取模块、程序生成导出模块、模拟评分模块;
所述文件库模块用于在实操前将目标预期达成模型文件调取下发至用户端,并对用户端模拟实操后提交的模拟实操文件进行保存;
所述程序生成导出模块用于将模拟实操文件生成加工程序或步骤文字,并导入代为操作端进行代为操作;
所述模拟评分模块用于将用户端在模拟实训过程中产生的最终版模拟实操文件与文件库模块提供的目标预期达成模型文件中的各项参数指标数据进行比较,比对用户模拟实操的完成度、相似度和模拟操作时间进行综合打分,分析缺陷,判断实际加工成功率,从而判定是否需要修正或交由程序生成导出模块导出代为操作的所需数据。
所述云端服务器作为文件的中间传输平台,用于降低教师端的文件调取下发负担,减缓网络加载延迟。
使用时,教师端从实训用的文件库模块中随机调取一个实训文件(含有目标预期达成模型文件、操作要去等内容)交由用户端,用户端接收教师端发布的实训指令要求,并在用户端的模拟软件上进行相应的实训模拟操作,模拟操作结束后的到操作流程步骤和最终生成的模拟产品对应的相关数据上传至模拟评分模块中比对文件库模块提供的目标预期达成模型文件中的各项参数指标数据,比对用户模拟实操的完成度、相似度和模拟操作时间进行综合打分,分析缺陷,判断实际加工成功率,若存在需要修正后才能交由的程序生成导出模块导出代为操作的所需数据,则需要返回用户端进行修改后再次提交,若模拟评分模块综合分析打分后符合要求,则由程序生成导出模块用于将模拟实操文件生成加工程序或步骤文字,并导入代为操作端进行代为操作,通过本发明的设置,可使得用户在任何地方都可以进行实训操作,且实训结果都可以的到准确的成绩评价,并在确认可以加工的情况加工出事物,从而实现虚拟实训操作但可以得到真实实训产物的效果,为实训解决的场地问题的同时,保证了用户可以尽可能的得到真实的实操经验。
具体的,所述云端服务器中具有教师端事先存储的虚拟模型数据库和实际工件数据库;所述虚拟模型数据库包括在用户端界面出现的二维/三维图形图纸、不同尺寸独立/组装的工件立体模型、透视/实体独立/组装的立体模型、模拟安装配合精度要求等数据;所述实际工件数据不同尺寸/重量/材质的独立/组装的立体工件、透视/实体独立/组装的立体工件、实际安装配合精度要求等数据;
所述虚拟模型数据库用于用户端根据下发的实训图纸直接调取所需的工件立体模型按照模拟安装配合精度要求进行组装,从而得到组装的步骤顺序和精度要求的模拟实操文件,在上传至云端服务器,供教师端进行后续操作;
所述实际工件数据库用于自动调取数据来匹配用户从虚拟模型数据库中选取的模型,用实际工件的实际体感代替虚拟模型的各项数据,从而真实化。
工作时,考虑到实训实操的种类不同,例如砂模铸造、钳工、焊接、车钻刨磨等工种,分别都涉及图纸、尺寸、材质、加工精度、安装精度的要求,因此,在实训模拟过程中,通过用户端界面(比如:电脑)操作的大多无法直观的体验实操过程中存在重量变化、温度变化、颜色变化等实际情况,因此,本发明通过在虚拟模型数据库的基础上配合实际工件数据库进行使用,当用户端根据下发的实训图纸直接调取所需的工件立体模型按照模拟安装配合精度要求进行组装,从而得到组装的步骤顺序和精度要求的模拟实操文件,在上传至云端服务器,供教师端进行后续操作;而实际工件数据库用于自动调取数据来匹配用户从虚拟模型数据库中选取的模型,用实际工件的实际体感代替虚拟模型的各项数据,从而真实化,而这种真实化的体验更多需要配合用户端包括操作模块中涉及的VR设备来实现,因为对于用户端界面(比如:电脑)而言更多还是存在于二维感官上的视觉变化,通过VR设备的重力反馈和触觉反馈可以在将虚拟模型组合加工过程中触感变化,来使用户真正感受到实际操作的真实感,必然虚拟操作中的失误或错位行为无法为用户带来直观的经验。
具体的,所述用户端包括操作模块、自检模块和记录模块;所述操作模块包括装有模拟软件的移动终端上和/或VR设备,操作模块用于对获取的虚拟工件模型进行模拟拿取并按要求进行组装,且虚拟工件模型在选取后可通过实际工件数据库的实际数据匹配来实现工件模型的真实化,当佩戴VR设备时,利用VR设备的重力反馈和触觉反馈,来进行虚拟场景下的模拟实操加工;所述自检模块用于将用户模拟实操结束后得到的模拟实操文件与目标预期达成模型文件先进行自我分析比对,若发现问题则可以及时改正,减少明显错误文件带来的资源浪费;所述记录模块则在用户端记录用户所有的操作过程,用于实操后的用户回顾学习使用,并将用户端记录用户所有的操作过程及时反馈至教师端,便于教师及时纠正用户模拟操作失误、错误或不知如何操作的问题。
工作时,用户可以选择直接在移动终端(例如:电脑)上直接操作,也可以佩戴VR设备进行更为真实的实训体验操作模块用于对获取的虚拟工件模型进行模拟拿取并按要求进行组装,且虚拟工件模型在选取后可通过实际工件数据库的实际数据匹配来实现工件模型的真实化,当佩戴VR设备时,利用VR设备的重力反馈和触觉反馈,来进行虚拟场景下更为真实化的模拟实操加工;记录模块在记录整个操作过程和结果后,通过自检模块先自行分析校验是否存在操作失误或错误的地方,有则修改,没有则上传至教师端的模拟评分模块进行综合评分;而在操作过程中,由于记录模块的实时记录,教师端的教师可以及时的发现操作失误或错误的步骤,可以选择当即提醒或事后提醒用户操作失误或错误的步骤,而事后提醒更有助于训练用户(学生)自我查找问题的能力,而当即提醒则更多是在操作步骤完全错误或不知如何操作的情况下。
具体的,所述VR设备通过连接移动终端,来调取实际工件数据库中的实际工件数据不同尺寸/重量/材质的独立/组装的立体工件、透视/实体独立/组装的立体工件、实际安装配合精度要求等数据,通过对安装过程中存在的嵌入式零件、内藏零件及插合式进行透视和实体的自由切换,来提高安装精度。
优选的,所述操作模块中所包含的语音系统与教师端中所存在的语音系统存在网联关系,用于在教师端的操作导师根据记录模块记录反馈的实时内容进行语音指导用户的错误行为。
具体的,所述教师端还包括扫描录入模块;所述扫描录入模块用于实现对实训场景进行扫描生成模拟实训环境和所需物品临时性的扫描录入;所述扫描录入模块获得的数据输入教师端内并保存在云端服务器内用于服务用户端,用于增加用户操作的多样性和自由性。
工作时,佩戴VR设备的用户,可通过连接的移动终端来调取实际工件数据库中的实际工件数据不同尺寸/重量/材质的独立/组装的立体工件、透视/实体独立/组装的立体工件、实际安装配合精度要求等数据通过对安装过程中存在的嵌入式零件、内藏零件及插合式进行透视和实体的自由切换,来提高安装精度,切实感受零件安装的必要精度条件,这点是实际加工中所无法轻易实现的;为了保证操作环境的模拟,佩戴VR设备的用户还可以获得扫描录入模块获取的实训场景,来提高用户身历其境的感觉,并且通过设置扫描录入模块,当用于在非考试状态下的实训实操过程中,可自由扫描录入所需物件,比如某种异形件,当然,这仅限于模拟实训过程中,用来增加学生的创新能力。
具体的,所述扫描录入模块还用于实时扫描检验代为操作端每道装配工序的精度数据,并将装配精度数据反馈至教师端和用户端,确保操作程序与用户端提交的模拟实操文件生成加工程序或步骤文字相同,降低远程代为实操的准确性。
具体的,所述代为操作端采用人为操作模式或机械自动加工操作模式;所述人为操作模式为将程序生成导出模块将用户提交的最终版模拟实操文件生成步骤文字最为实际加工步骤的指导书,进行现场人工操作演示;所述机械自动加工操作模式为将程序生成导出模块将用户提交的最终版模拟实操文件生成加工程序导入组装或加工机器中,进行机械化自动操作演示。
具体的,所述人为操作模式或机械自动加工操作模式根据用户提交的最终版模拟实操文件生成步骤文字或加工程序所得到的两个版本的实物,均提交至验收导师环节进行验收是否合格。
具体工作流程如下:
使用时,教师端从实训用的文件库模块中随机调取一个实训文件(含有目标预期达成模型文件、操作要去等内容)交由用户端,用户端接收教师端发布的实训指令要求,并在用户端的模拟软件上进行相应的实训模拟操作,模拟操作结束后的到操作流程步骤和最终生成的模拟产品对应的相关数据上传至模拟评分模块中比对文件库模块提供的目标预期达成模型文件中的各项参数指标数据,比对用户模拟实操的完成度、相似度和模拟操作时间进行综合打分,分析缺陷,判断实际加工成功率,若存在需要修正后才能交由的程序生成导出模块导出代为操作的所需数据,则需要返回用户端进行修改后再次提交,若模拟评分模块综合分析打分后符合要求,则由程序生成导出模块用于将模拟实操文件生成加工程序或步骤文字,并导入代为操作端进行代为操作,通过本发明的设置,可使得用户在任何地方都可以进行实训操作,且实训结果都可以的到准确的成绩评价,并在确认可以加工的情况加工出事物,从而实现虚拟实训操作但可以得到真实实训产物的效果,为实训解决的场地问题的同时,保证了用户可以尽可能的得到真实的实操经验。
考虑到实训实操的种类不同,例如砂模铸造、钳工、焊接、车钻刨磨等工种,分别都涉及图纸、尺寸、材质、加工精度、安装精度的要求,因此,在实训模拟过程中,通过用户端界面(比如:电脑)操作的大多无法直观的体验实操过程中存在重量变化、温度变化、颜色变化等实际情况,因此,本发明通过在虚拟模型数据库的基础上配合实际工件数据库进行使用,当用户端根据下发的实训图纸直接调取所需的工件立体模型按照模拟安装配合精度要求进行组装,从而得到组装的步骤顺序和精度要求的模拟实操文件,在上传至云端服务器,供教师端进行后续操作;而实际工件数据库用于自动调取数据来匹配用户从虚拟模型数据库中选取的模型,用实际工件的实际体感代替虚拟模型的各项数据,从而真实化,而这种真实化的体验更多需要配合用户端包括操作模块中涉及的VR设备来实现,因为对于用户端界面(比如:电脑)而言更多还是存在于二维感官上的视觉变化,通过VR设备的重力反馈和触觉反馈可以在将虚拟模型组合加工过程中触感变化,来使用户真正感受到实际操作的真实感,必然虚拟操作中的失误或错位行为无法为用户带来直观的经验。
用户可以选择直接在移动终端(例如:电脑)上直接操作,也可以佩戴VR设备进行更为真实的实训体验操作模块用于对获取的虚拟工件模型进行模拟拿取并按要求进行组装,且虚拟工件模型在选取后可通过实际工件数据库的实际数据匹配来实现工件模型的真实化,当佩戴VR设备时,利用VR设备的重力反馈和触觉反馈,来进行虚拟场景下更为真实化的模拟实操加工;记录模块在记录整个操作过程和结果后,通过自检模块先自行分析校验是否存在操作失误或错误的地方,有则修改,没有则上传至教师端的模拟评分模块进行综合评分;而在操作过程中,由于记录模块的实时记录,教师端的教师可以及时的发现操作失误或错误的步骤,可以选择当即提醒或事后提醒用户操作失误或错误的步骤,而事后提醒更有助于训练用户(学生)自我查找问题的能力,而当即提醒则更多是在操作步骤完全错误或不知如何操作的情况下。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 基于视觉的机器人入库实训机构及机器人实训教学平台
- 基于视觉的机器人实训装置及机器人实训教学平台