控制电机低速正转和低速反转的软启动器控制方法
文献发布时间:2023-06-19 19:07:35
技术领域
本发明涉及电机控制技术领域,具体涉及一种可控制电机低速正转和低速反转的软启动器控制方法。
背景技术
三相异步电机直接起动时,电流通常会达到5~8倍,甚至更大,产生很大冲击电流,对同个系统中的电网产生很大的波动,对整个传动系统、设备产生不良影响。软起动器是一种集电动机软起动、软停车、轻载节能和多种保护功能于一体的新颖电动机控制装置。采用软起动器后,上述问题得到解决,起动电流可以进行设置和限制。
在一些应用场景下,需要控制电机低速正转或低速反转,例如水泵清洗时,需要控制水泵低速正转或低速反转,但是现有软启动器不具备低速正转和低速反转控制功能。已知三相异步电机转速与输入电机的三相同步旋转磁场转速成正比关系,而输入电机的三相同步旋转磁场转速仅与输入电机的三相电流频率成正比;因此,在电机输入电压频率不变的情况下,可通过降低电机的三相电流频率以降低电机转速,改变电机的三相电流的相序以改变电机运行的方向。
现有电机软起动器,在其每相的输入端与输出端之间串接一组反并联晶闸管,共有三相。由于晶闸管的开通与关断是基于电压过零的开通与关断,电机的三相电流频率只能是电网频率的整数份之一。因此在电网频率不变的情况下,现有软起动器若要实现被控电机的低速运行必须降低电机的三相电流频率,而且是离散的;在电网频率相序不变的情况下,现有软起动器若要实现被控电机的低速正转或反转必须同时改变电机输入的三相电流相序。此外,在电机输入电压不变的情况下,若电机的三相电流频率降低时,容易导致电机磁通饱和,故需要同步降低电机输入的电压,参照变频器VVVF调速控制方案,软起动器的输出电压幅值也须同步降低,从而避免了被控电机的因磁通饱和而烧毁。
基于上述情况,亟需一种软启动器,其在不改变电网输入相序、电网频率和现有电机软起动器主电路的条件下,控制电机低速正转和低速反转且运行平稳。
发明内容
本发明的目的在于克服现有技术的缺陷,提供一种控制电机低速正转和低速反转的软启动器控制方法,通过现有软启动器实现了对于电机低速正转和低速反转控制。
为实现上述目的,本发明采用了如下技术方案:
一种控制电机低速正转和低速反转的软启动器控制方法,软启动器包括三相反并联晶闸管,串联在电网的T相和电机的W相输入端之间的反并联晶闸管具有信号端V
所述电机的低速正转的正转分频系数K
所述电机低速正转的转速
其中,n
所述电机的低速反转的反转分频系数K
所述电机低速翻转的转速
其中,n
通过控制晶闸管的触发时序及每次向晶闸管输入触发信号的时间点以通过软启动器控制电机进行转速为V
优选的,所述软启动器控制方法使电机的各相输入电流符合以下条件:
(1)所述电机的各相输入电流的基波均为正弦波;
(2)基于正转分频系数K
(3)所述电机的各相输入电流的基波相位互差1/3个基波周期T
优选的,所述电机的V相输入电流的基波的相位滞后U相输入电流的基波的相位1/3个基波周期且电机的W相输入电流的基波的相位滞后U相输入电流的基波的相位1/3个基波周期时,电机各相输入电流的相序为正相序,电机低速正转;
所述电机的V相输入电流的基波的相位滞后U相输入电流的基波的相位2/3个基波周期且W相输入电流的基波的相位滞后U相输入电流的基波的相位1/3个基波周期时,电机各相输入电流的相序为反相序,电机低速反转。
优选的,同一时刻只能向不同相的两路晶闸管发送触发信号,而且两路触发信号分别为正向触发信号和反向触发信号。
优选的,通过控制晶闸管的触发角度,调整电机的输出扭矩。
优选的,所述正转分频系数K
所述电网的周期为T
步骤4-1,将检测到所述电网R相电压过零点下降沿信号的时刻记为时间点t
步骤4-2,从时间点t
步骤4-3,从时间点t
步骤4-4,从时间点t
步骤4-5,从时间点t
步骤4-6,从时间点t
步骤4-7,从时间点t
步骤4-8,从时间点t
步骤4-9,从时间点t
步骤4-10,检测到所述R相电压过零点下降沿信号,重复步骤4-1至4-9,直至收到停机命令。
优选的,所述反转分频系数K
所述电网的周期为T
步骤5-1,将检测到所述电网R相电压过零点下降沿信号的时刻记为时间点t
步骤5-2,从时间点t
步骤5-3,从时间点t
步骤5-4,从时间点t
步骤5-5,从时间点t
步骤5-6,从时间点t
步骤5-7,从时间点t
步骤5-8,从时间点t
步骤5-9,从时间点t
步骤5-10,从时间点t
步骤5-11,从时间点t
步骤5-12,从时间点t
步骤5-13,检测到所述R相电压过零点下降沿信号,重复步骤5-1至5-12,直至收到停机命令。
优选的,所述软启动控制方法,通过在电机的三相输入电流的基波周期内,同步减小触发角度以增大电机的输出转矩。
优选的,所述触发角度每次减少δ度,9≤δ≤36。
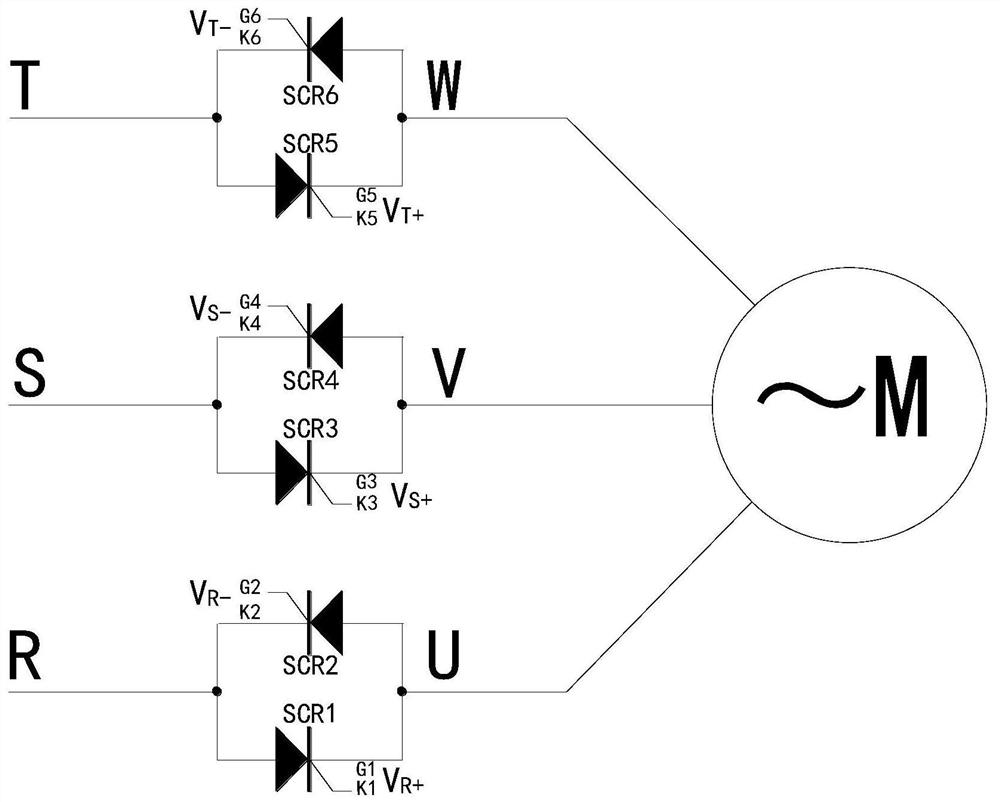
优选的,串联在电网的T相和电机的W相输入端之间的反并联晶闸管包括T相正向晶闸管SCR5和T相负向晶闸管SCR6,T相正向晶闸管SCR5具有信号端V
优选的,通过以下方法计算电机的低速正转的正转分频系数K
工频磁场旋转角速度为ω
ω
其中,K
所述电网为三相平衡系统,各相相位差为120°,A相和B相为电网的R、S、T三相中的任意两相,A相的相位角为0°时,B相的相位角符合以下等式:
ω
其中,n为整数,t为时间;
所述低速正转分频电网系统,即是软启动器向电机输入的使其低速正转的三相电源系统,也是三相平衡系统,各相相位差为120°,A
ω
由等式(3)变形得到以下等式:
ω
将等式(1)带入等式(2)得到以下等式:
K
将等式(3)带入等式(5)得到以下等式:
通过以下方法计算电机的低速反转的反转分频系数KR:
工频磁场旋转角速度为ω
ω
其中,K
所述电网为三相平衡系统,各相相位差为120°,A相和B相为电网的R、S、T三相中的任意两相,A相的相位角为0°时,B相的相位角符合以下等式:
ω
其中,n为整数,t为时间;
所述低速反转分频电网系统,即是软启动器向电机输入的使其低速反转的三相电源系统,也是三相平衡系统,各相相位差为120°,A
ω
由等式(8)变形得到以下等式:
ω
将等式(6)带入等式(7)得到以下等式:
K
将等式(9)带入等式(10)得到以下等式:
本发明控制电机低速正转和低速反转的软启动器控制方法,可以在不改变电网输入相序、电网频率和传动电机软启动器的主电路的前提下,通过改进方法确定电机的低速正转的正转分频系数K
附图说明
图1是本发明软启动器的电路结构示意图;
图2是本发明4分频低速正转时电机的三相输入电流的基波的波形示意图;
图3是本发明5分频低速反转时电机的三相输入电流的基波的波形示意图。
具体实施方式
以下结合附图1-3给出的实施例,进一步说明本发明的控制电机低速正转和低速反转的软启动器控制方法的具体实施方式。本发明的控制电机低速正转和低速反转的软启动器控制方法不限于以下实施例的描述。
如图1所示,为本发明软启动器的一个实施例。
所述软启动器包括三相反并联晶闸管,串联在电网的T相和电机的W相输入端之间的反并联晶闸管具有信号端V
本发明控制电机低速正转和低速反转的软启动器控制方法,应用于上述软启动器;
所述电机的低速正转的正转分频系数K
所述电机低速正转的转速
其中,n
所述电机的低速反转的反转分频系数K
所述电机低速翻转的转速
其中,n
控制晶闸管的触发时序及每次向晶闸管输入触发信号的时间点以通过软启动器控制电机进行转速为V
具体的,所述正转分频系数K
本发明控制电机低速正转和低速反转的软启动器控制方法,可以在不改变电网输入相序、电网频率和传动电机软启动器的主电路的前提下,通过改进方法确定电机的低速正转的正转分频系数K
以下为电机的低速正转的正转分频系数K
工频磁场旋转角速度为ω
ω
其中,K
所述电网为三相平衡系统,各相相位差为120°,A相和B相为电网的R、S、T三相中的任意两相,A相的相位角为0°时,B相的相位角符合以下等式:
ω
其中,n为整数,t为时间;
所述低速正转分频电网系统,即是软启动器向电机输入的使其低速正转的三相电源系统,也是三相平衡系统,各相相位差为120°,A
ω
由等式(3)变形得到以下等式:
ω
将等式(1)带入等式(2)得到以下等式:
K
将等式(4)带入等式(5)得到以下等式:
在n
以下为电机的低速反转的反转分频系数K
工频磁场旋转角速度为ω
ω
其中,K
所述电网为三相平衡系统,各相相位差为120°,A相和B相为电网的R、S、T三相中的任意两相,A相的相位角为0°时,B相的相位角符合以下等式:
ω
其中,n为整数,t为时间;
所述低速反转分频电网系统,即是软启动器向电机输入的使其低速反转的三相电源系统,也是三相平衡系统,各相相位差为120°,A
ω
由等式(8)变形得到以下等式:
ω
将等式(6)带入等式(7)得到以下等式:
K
将等式(9)带入等式(10)得到以下等式:
在n
参照图2和3所示,所述软启动器控制方法使电机的各相输入电流符合以下条件:
(1)所述电机的各相输入电流的基波均为正弦波。因此,所述电机的各相输入电流波形是三相对称的,相位互差1/3周期,同时电机的各相输入电流的有效值也是平衡的。
(2)基于正转分频系数K
所述电机的转速与输入电流的基波频率成正比,从而通过改变各相输入电流基波频率的方式改变了电机的转速。
(3)所述电机的各相输入电流的基波相位互差1/3个基波周期。
所述电机的V相输入电流的基波的相位滞后U相输入电流的基波的相位1/3个基波周期且电机的W相输入电流的基波的相位滞后U相输入电流的基波的相位1/3个基波周期时,电机各相输入电流的相序为正相序,电机低速正转;所述电机的V相输入电流的基波的相位滞后U相输入电流的基波的相位2/3个基波周期且W相输入电流的基波的相位滞后U相输入电流的基波的相位1/3个基波周期时,电机各相输入电流的相序为反相序,电机低速反转。
在任何一种分频系数下,合成后的旋转磁场都做圆周运动,三相电流平衡,电机低速正转或低速反转时震动都很小。
优选的,同一时刻只能向不同相的两路晶闸管发送触发信号,而且两路触发信号分别为正向触发信号和反向触发信号,将在以下示例中做具体说明。
本发明控制电机低速正转和低速反转的软启动器控制方法,通过控制晶闸管的触发角度和/或触发信号的宽度,调整电机的输出扭矩。
以下为本发明控制电机低速正转和低速反转的软启动器控制方法的具体控制示例:
示例一:
n
所述电网的周期为T
步骤4-1,将检测到所述电网R相电压过零点下降沿信号的时刻记为时间点t
步骤4-2,从时间点t
步骤4-3,从时间点t
步骤4-4,从时间点t
步骤4-5,从时间点t
步骤4-6,从时间点t
步骤4-7,从时间点t
步骤4-8,从时间点t
步骤4-9,从时间点t
步骤4-10,在时间点t
如图2所示,为示例一的电机的三相输入电流的基波图形,R、S、T相的基波相位依次互差T1
需要指出的,所述正转分频系数K
示例二:
n
所述电网的周期为T
步骤5-1,将检测到所述电网R相电压过零点下降沿信号的时刻记为时间点t
步骤5-2,从时间点t
步骤5-3,从时间点t
步骤5-4,从时间点t
步骤5-5,从时间点t
步骤5-6,从时间点t
步骤5-7,从时间点t
步骤5-8,从时间点t
步骤5-9,从时间点t
步骤5-10,从时间点t
步骤5-11,从时间点t
步骤5-12,从时间点t
步骤5-13,在时间点t
如图3所示,为示例二的电机的三相输入电流的基波图形,R、S、T相的基波相位依次互差T1
需要指出的,所述反转分频系数KR取其他数值(也即是除5以外的其他数值)时,由于不同的反转分频系数KR对应不同的触发角度和触发时序,因此在示例二的基础上,对触发角度和触发时序做适应性改变,并最终满足以下三个条件即可:(1)产生的三相电流的基波波形互差120°;(2)各相电流波形是对称,也即是各相电流波形为正弦波;(3)电流的基波频率=电网频率/反转分频系数。
结合示例一和示例二可以看出:
1、通过控制晶闸管的触发时序,可以实现对于电机转动方向的控制,也即是控制电机正转或反转;
2、通过控制向晶闸管输入触发信号的时间点,可以实现对于晶闸管导通的时间点的控制,从而通过晶闸管向电机输入与触发信号对应的电流(也即是图2和3中的馒头波形电流信号),输入电机的电流的基波频率等于电网频率/正转或反转分频系数,也即是输入电机的电流的基波周期等于电网周期×正转或反转分频系数;
3、通过控制晶闸管的初始的触发角度,可以实现对于晶闸管输入电机的电流强度,从而实现对于电机输出转矩的调整。
优选的,本发明控制电机低速正转和低速反转的软启动器控制方法,通过在电机的三相输入电流的基波周期内,同步减小或增大触发角度以增大或减小电机的输出转矩。进一步的,所述触发角度每次减少或增大δ度,9≤δ≤36,δ取值越大则电机的输出转矩的改变值越大,也即是δ取值越大则电机的输出转矩的变化率越大。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种低速发动机喷油控制装置、低速发动机及低速发动机喷油控制方法
- 电机正转反转停止循环控制装置及系统