电力转换装置、马达驱动装置、送风机、压缩机及空调机
文献发布时间:2023-06-19 19:07:35
技术领域
本公开涉及将从交流电源输出的交流电压转换为直流电压的电力转换装置、具备电力转换装置的马达驱动装置、具备马达驱动装置的送风机和压缩机以及具备送风机或压缩机的空调机。
背景技术
在下述专利文献1中记载了:在利用360°/n的相位差来驱动n相的开关输出级从而生成所期望的输出电压的交错转换器中,根据基于各电抗器的检测电流的电流反馈信号以及电压反馈信号,进行流过各相的电抗器的电抗器电流的平衡控制。
现有技术文献
专利文献
专利文献1:日本特开2017-208976号公报
发明内容
发明要解决的问题
通过专利文献1所记载的电流平衡控制,各相的电抗器电流被平准化。然而,在专利文献1的技术中,需要分别对各相的电抗器电流进行检测,按照每个相而需要电流检测器。因此,在专利文献1的技术中,产生制造成本增加这样的问题。
本公开是鉴于上述问题而完成的,其目的在于,得到能够抑制制造成本的增加并且将电抗器电流平准化的电力转换装置。
用于解决问题的手段
为了解决上述问题并达成目的,本公开的电力转换装置具备将从交流电源输出的交流电压转换为直流电压的转换器电路。转换器电路具有数量与多个相的相数相同的单位转换器,单位转换器具有1个电抗器和至少1个开关元件。此外,电力转换装置具备:电流检测器,其检测分别在多个电抗器中流过的电流的合计值;以及电压检测器,其检测转换器电路的输出电压。并且,电力转换装置具备控制装置,该控制装置基于电流检测器和电压检测器的检测值生成基准占空比,并且基于基准占空比与载波信号的比较结果,生成用于控制开关元件的脉宽调制信号。作为载波信号的周期的第1周期比作为交流电压的周期的第2周期短。各个单位转换器的脉宽调制信号在第1周期内具有1个脉冲,并且在将第1周期乘以相数得到的第3周期内具有相数个脉冲。此外,各个单位转换器的第3周期内的相数个脉冲在每个第1周期内相位全部不同。
发明的效果
根据本公开的电力转换装置,得到能够抑制制造成本的增加并且将电抗器电流平准化这样的效果。
附图说明
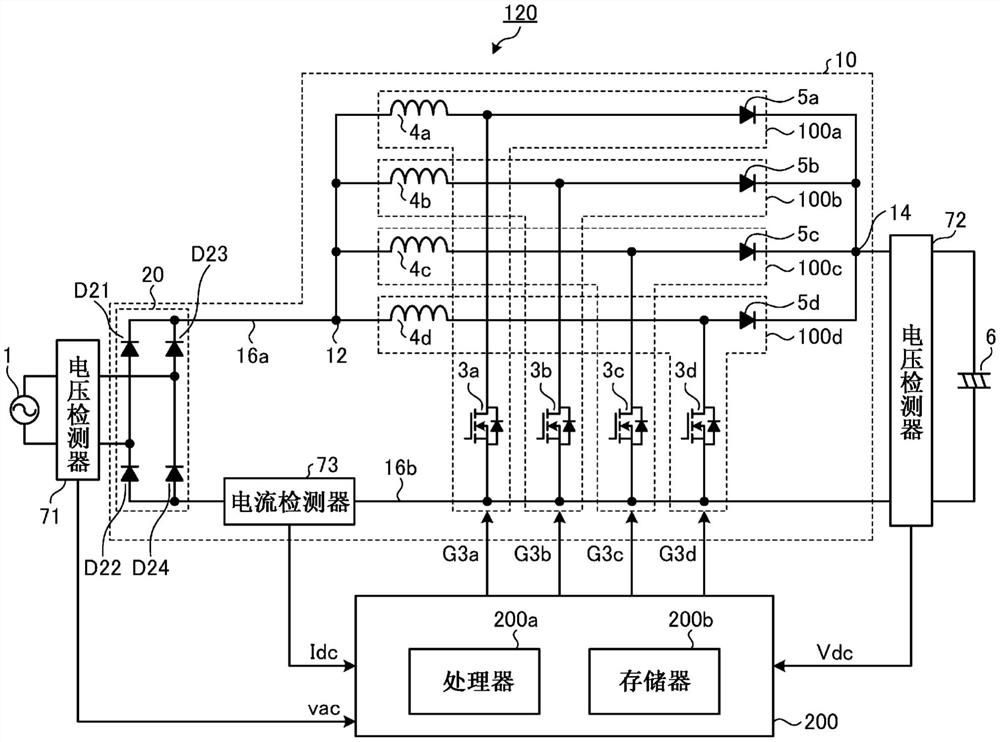
图1是示出实施方式1的电力转换装置的结构的图。
图2是示出在通常的电力转换装置中使用的开关模式的例子的图。
图3是示出优选在实施方式1的电力转换装置中使用的开关模式的第1例的图。
图4是示出优选在实施方式1的电力转换装置中使用的开关模式的第2例的图。
图5是示出优选在实施方式1的电力转换装置中使用的开关模式的第3例的图。
图6是示出在实施方式1的控制装置内构成的控制系统的结构例的框图。
图7是示出在图6所示的控制系统内使用的载波信号的波形例的图。
图8是示出实施方式1中的基准占空比运算部的结构例的图。
图9是示出实施方式2的马达驱动装置的结构例的图。
图10是示出将图9所示的马达驱动装置应用于空调机的例子的图。
具体实施方式
下面参照附图,对本公开的实施方式的电力转换装置、马达驱动装置、送风机、压缩机及空调机进行说明。
实施方式1.
图1是示出实施方式1的电力转换装置120的结构的图。实施方式1的电力转换装置120具备转换器电路10、平滑电容器6、电压检测器71、72、电流检测器73、控制装置200。
转换器电路10将从交流电源1输出的交流电压转换为直流电压。平滑电容器6使由转换器电路10转换后的直流电压平滑并进行保持。
转换器电路10具有单位转换器100a、100b、100c、100d以及整流电路20。
整流电路20具有被桥接的4个二极管D21、D22、D23、D24。整流电路20对从交流电源1输出的交流电压进行整流,将整流后的电压施加到单位转换器100a、100b、100c、100d。
单位转换器100a具有电抗器4a、防逆流二极管5a、开关元件3a。单位转换器100b具有电抗器4b、防逆流二极管5b、开关元件3b。单位转换器100c具有电抗器4c、防逆流二极管5c、开关元件3c。单位转换器100d具有电抗器4d、防逆流二极管5d、开关元件3d。
在转换器电路10中,将1个电抗器与1个开关元件的组合定义为“相”,并算作“1相”。
图1是4相的例子,是4相交错方式的结构。可以通过a、b、c、d的标记来进行各相的识别。以下,有时将各相的动作记载为“a相”、“b相”、“c相”及“d相”。另外,本公开的内容不限于仅4相,也可以是2相、3相或5相以上。即,本公开的电力转换装置120是具备数量与多个相的相数相同的单位转换器的交错方式的电力转换装置。
转换器电路10具有连接点12,该连接点12连接电抗器4a、4b、4c、4d各自的一端。连接点12与整流电路20的一端通过电布线16a而连接。此外,转换器电路10具有连接点14,该连接点14与防逆流二极管5a、5b、5c、5d各自的阴极连接。连接点14与平滑电容器6的正极侧端子连接。
此外,在单位转换器100a中,电抗器4a的另一端与防逆流二极管5a的阳极连接。电抗器4a与防逆流二极管5a的连接点连接于开关元件3a的一端。单位转换器100b、100c、100d也构成为与单位转换器100a同样。此外,在单位转换器100a、100b、100c、100d中,开关元件3a、3b、3c、3d各自的另一端彼此也被连接。开关元件3a、3b、3c、3d各自的另一端与整流电路20的另一端通过电布线16b而连接。
开关元件3a、3b、3c、3d的一例是金属氧化物半导体场效应晶体管(Metal OxideSemiconductor Field Effect Transistor:MOSFET)。也可以代替MOSFET而使用绝缘栅双极晶体管(Insulated Gate Bipolar Transistor:IGBT)。
开关元件3a、3b、3c、3d分别具备在漏极与源极之间反向并联连接的二极管。反向并联连接是指,MOSFET的漏极与二极管的阴极连接,MOSFET的源极与二极管的阳极连接。另外,二极管也可以使用MOSFET自身在内部具有的寄生二极管。寄生二极管也可以称作体二极管。
此外,开关元件3a、3b、3c、3d不限定于由硅形成的MOSFET,也可以是由碳化硅、氮化镓、氧化镓或金刚石这样的宽带隙半导体形成的MOSFET。
一般来讲,宽带隙半导体相比于硅半导体,耐电压及耐热性高。因此,通过在开关元件3a、3b、3c、3d中分别使用宽带隙半导体,开关元件的耐电压性及容许电流密度变高,能够使嵌入了开关元件的半导体模块小型化。
电流检测器73配置于电布线16b。电流检测器73检测分别在电抗器4a、4b、4c、4d中流过的电抗器电流的合计值即合计电流Idc。另外,在图1中例示了电流检测器73配置于电布线16b的结构,但不限于此。电流检测器73也可以配置于电布线16a。
电压检测器71检测交流电源1的输出电压即交流电压vac。电压检测器72检测平滑电容器6的电压即电容器电压Vdc。电容器电压Vdc也是转换器电路10的输出电压。
控制装置200具备处理器200a、存储器200b。控制装置200接收由电流检测器73检测到的合计电流Idc的检测值。控制装置200接收由电压检测器71检测到的交流电压vac的检测值。控制装置200接收由电压检测器72检测到的电容器电压Vdc的检测值。
控制装置200基于合计电流Idc、交流电压vac及电容器电压Vdc,生成栅极信号G3a、G3b、G3c、G3d。
单位转换器100a、100b、100c、100d具有省略图示的栅极驱动电路。单位转换器100a的栅极驱动电路使用从控制装置200输出的栅极信号G3a来生成驱动脉冲,将生成的驱动脉冲施加到开关元件3a的栅极从而驱动开关元件3a。
单位转换器100b的栅极驱动电路使用从控制装置200输出的栅极信号G3b来生成驱动脉冲,将生成的驱动脉冲施加到开关元件3b的栅极从而驱动开关元件3b。
单位转换器100c的栅极驱动电路使用从控制装置200输出的栅极信号G3c来生成驱动脉冲,将生成的驱动脉冲施加到开关元件3c的栅极从而驱动开关元件3c。
单位转换器100d的栅极驱动电路使用从控制装置200输出的栅极信号G3d来生成驱动脉冲,将生成的驱动脉冲施加到开关元件3d的栅极从而驱动开关元件3d。
后面叙述控制装置200的详细动作。另外,输入到控制装置200的检测值中的由电压检测器71检测的交流电压vac的检测值用于改善在转换器电路10中流过的电流的失真。因此,无论是否具有电压检测器71,与转换器电路10的基本的动作有关的控制都成立。
在控制装置200中,处理器200a是运算装置、微处理器、微计算机、CPU(CentralProcessing Unit:中央处理单元)、或DSP(Digital Signal Processor:数字信号处理器)这样的运算单元。存储器200b是RAM(Random Access Memory:随机存取存储器)、ROM(ReadOnly Memory:只读存储器)、闪存、EPROM(Erasable Programmable ROM)、EEPROM(注册商标)(Electrically EPROM)这样的非易失性或易失性的半导体存储器。
在存储器200b中存储有执行上述的控制装置200的功能以及后述的控制装置200的功能的程序。处理器200a经由包含未图示的模拟数字转换器和数字模拟转换器的接口而收发所需要的信息,通过由处理器200a执行存储器200b中存储的程序而进行所需要的处理。处理器200a的运算结果存储于存储器200b。
在开关元件3a、3b、3c、3d中的任意开关元件被控制而进行开关动作时,从交流电源1供给的电力被蓄积于对应的电抗器。控制装置200进行如下控制:使开关元件3a、3b、3c、3d以预先决定的占空比进行开关动作,使得从转换器电路10输出的电压成为所期望的电压。
图2是示出在通常的电力转换装置中使用的开关模式的例子的图。在图2的上段部中示出整流电压Vs的波形。整流电压Vs是整流电路20的输出电压,也是向单位转换器100a、100b、100c、100d施加的印加电压。在图2的下段部,作为与基本动作相关的开关模式而示出栅极信号G3a、G3b、G3c、G3d的脉冲序列。
栅极信号G3a、G3b、G3c、G3d是脉宽调制(Pulse Width Modulation:PWM)信号。在栅极信号G3a、G3b、G3c、G3d中,相邻的栅极信号间的间隔被称为“交错周期”。
载波周期是载波信号的周期。后面叙述载波信号。另外,下面有时将载波周期记载为“第1周期”。
交错周期为将载波周期除以相数得到的值。当设与1个载波周期相当的相位为360°时,4相交错方式的电力转换装置中的交错周期为90°(=360°/4)。
在图2所示的开关模式的情况下,在每1个载波周期中,按照开关元件3a、开关元件3b、开关元件3c、开关元件3d的顺序进行开关控制。
接着,针对在各单位转换器中当各开关元件导通时在对应的电抗器中流过的电抗器电流的变化进行说明。另外,将电抗器电流的变化部分称为“电流波纹”,将单位转换器100a、100b、100c、100d中的电流波纹分别表记为ΔIa、ΔIb、ΔIc、ΔId。这些电流波纹ΔIa、ΔIb、ΔIc、ΔId能够通过以下的(1)~(4)式来表示。
ΔIa=(Vs1/La)·Ton_a…(1)
ΔIb={(Vs1+ΔVs·(1/4))/Lb}·Ton_b…(2)
ΔIc={(Vs1+ΔVs·(2/4))/Lc}·Ton_c…(3)
ΔId={(Vs1+ΔVs·(3/4))/Ld}·Ton_d…(4)
在上述(1)~(4)式中,La、Lb、Lc、Ld是电抗器4a、4b、4c、4d各自的电感值。此外,Ton_a、Ton_b、Ton_c、Ton_d是开关元件3a、3b、3c、3d导通时的各导通时间。此外,Vs1是第1载波周期的开始时间点的整流电压。
整流电路20的输出电压的周期是交流电压的周期的一半,即交流电压的周期的1/2。另外,下面有时将交流电压的周期记载为“第2周期”。
这里,载波周期与交流电压的周期的一半相比足够短。因此,在载波周期内中,可以视为整流电路20的输出电压以正或负的比例关系进行变化。此时的第1载波周期与第2载波周期之间的整流电压的电压变化量是ΔVs。但是,在图2的例中,为了方便计算,当设第1载波周期的第4个交错周期的开始时间点的整流电压为Vs2时,将“Vs2-Vs1”设定为ΔVs。
此外,在以往的开关控制中,栅极信号G3a、G3b、G3c、G3d的各脉宽通常被设为相同时间,即Ton_a=Ton_b=Ton_c=Ton_d=Ton。此时,上述(1)式能够如以下的(5)式那样表示。
Vs1=(La·ΔIa)/Ton…(5)
此外,上述(2)式能够如以下的(6)式那样表示。
ΔIb=(Vs1/Lb+ΔVs/(4·Lb))·Ton…(6)
根据上述(5)、(6)式,电流波纹ΔIa、ΔIb的关系能够通过以下的(7)式表示。
ΔIb=(La/Lb)·ΔIa+ΔVs·Ton/(4·Lb)…(7)
进而,假定电抗器4a、4b的电感值是La=Lb=L。此时,上述(7)式能够通过以下的(8)式表示。
ΔIb=ΔIa+ΔVs·Ton/(4·L)……(8)
如上述(8)式所示,在电流波纹ΔIa与电流波纹ΔIb之间产生第2项所示的成分的偏移。虽然省略计算,但在与电流波纹ΔIc、ΔId之间也产生偏移。
如以上那样,在图2所示的开关模式中,即使电抗器4a~4d的电感值相同,此外,即使栅极信号G3a~G3d的脉宽相同,在电流波纹ΔIa~ΔId之间也产生偏移。这是因为,输入到单位转换器100a~100d的交流电压的振幅在各个动作定时发生微小的变化。
此外,交流电压的波形按照交流电压的周期被反复地输入到各单位转换器中,因此,电流波纹的偏移作为稳定的偏移而出现,电抗器电流的平准化变得困难。
于是,在实施方式1的电力转换装置中,例如图3那样变更开关模式。图3是示出优选在实施方式1的电力转换装置120中使用的开关模式的第1例的图。
图3的上段部所示的整流电压Vs的波形与图2所示的整流电压Vs的波形相同。在图3的下段部,作为实施方式1的方法的开关模式而示出栅极信号G3a、G3b、G3c、G3d的脉冲序列。
在图3中,Vs1是第1载波周期的开始时间点的整流电压。以下同样地,Vs2是第2载波周期的开始时间点的整流电压,Vs3是第3载波周期的开始时间点的整流电压,Vs4是第4载波周期的开始时间点的整流电压。此外,Vs5是下一个第1载波周期的开始时间点的整流电压。
与图2的情况同样,整流电路20的输出电压能够视为在载波周期内按照正或负的比例关系进行变化。为了表示相邻的载波周期间内的整流电压的电压变化量,将它们表记为ΔVs1、ΔVs2、ΔVs3。即,ΔVs1是第1载波周期与第2载波周期之间的整流电压的电压变化量,ΔVs2是第2载波周期与第3载波周期之间的整流电压的电压变化量。此外,ΔVs3是第3载波周期与第4载波周期之间的整流电压的电压变化量,ΔVs4是第4载波周期与接下来的第1载波周期之间的整流电压的电压变化量。但是,在图3的例中,为了方便计算,将第1载波周期的第4个交错周期的开始时间点的整流电压与Vs1之间的差分设定为ΔVs1。关于ΔVs2、ΔVs3、ΔVs4也是同样的。另外,由于第1个~第4个交错周期是相等的,因此,也可以将“Vs2-Vs1”的(3/4)倍的值设定为ΔVs1。关于ΔVs2、ΔVs3、ΔVs4也能够同样地进行设定。
在图3所示的开关模式的情况下,首先,在第1载波周期中,按照开关元件3a、开关元件3b、开关元件3c、开关元件3d的顺序进行开关控制。在接下来的第2载波周期中,按照开关元件3b、开关元件3c、开关元件3d、开关元件3a的顺序进行开关控制。以下,在第3载波周期中,按照开关元件3c、开关元件3d、开关元件3a、开关元件3b的顺序进行开关控制,在第4载波周期中,按照开关元件3d、开关元件3a、开关元件3b、开关元件3c的顺序进行开关控制。
归纳图3所示的开关模式的特征如下。首先,关于在前次的载波周期的开关控制中第1个即最初输出的栅极信号,在当前的载波周期中成为第4个即最后的栅极信号。此外,关于在前次的载波周期的开关控制中第2个、第3个和第4个输出的栅极信号,在当前的载波周期中分别成为第1个、第2个和第3个栅极信号。换言之,关于当前的载波周期的开关控制的顺序,在前次的载波周期的开关控制中第1个输出的栅极信号成为第4个,在前次的载波周期的开关控制中第2个~第4个输出的栅极信号依次上移,各自的相位分别提前90°而输出。
当第4载波周期结束时,返回第1载波周期。即,重复第1~第4载波周期。将第1~第4载波周期的整体称为“平准化周期”。另外,以下,有时将平准化周期记载为“第3周期”。
接着,考察利用图3所示的开关模式控制各单位转换器的情况下的各单位转换器中的电流波纹。
首先,第1载波周期的电流波纹ΔIa1、ΔIb1、ΔIc1、ΔId1能够通过以下的(9)式表示。
ΔIa1=Vs1/La·Ton1
ΔIb1={(Vs1+ΔVs1·(1/4))/Lb}·Ton2
ΔIc1={(Vs1+ΔVs1·(2/4))/Lc}·Ton3
ΔId1={(Vs1+ΔVs1·(3/4))/Ld}·Ton4
……(9)
此外,第2载波周期中的电流波纹ΔIa2、ΔIb2、ΔIc2、ΔId2能够通过以下的(10)式表示。
ΔIa2={(Vs2+ΔVs2·(3/4))/La}·Ton1
ΔIb2=Vs2/Lb·Ton2
ΔIc2={(Vs2+ΔVs2·(1/4))/Lc}·Ton3
ΔId2={(Vs2+ΔVs2·(2/4))/Ld}·Ton4
……(10)
此外,第3载波周期中的电流波纹ΔIa3、ΔIb3、ΔIc3、ΔId3能够通过以下的(11)式来表示。
ΔIa3={(Vs3+ΔVs3·(2/4))/La}·Ton1
ΔIb3={(Vs3+ΔVs3·(3/4))/Lb}·Ton2
ΔIc3=Vs3/Lc·Ton3
ΔId3={(Vs3+ΔVs3·(1/4))/Ld}·Ton4
……(11)
此外,第3载波周期中的电流波纹ΔIa4、ΔIb4、ΔIc4、ΔId4能够通过以下的(12)式表示。
ΔIa4={(Vs4+ΔVs4·(1/4))/La}·Ton1
ΔIb4={(Vs4+ΔVs4·(2/4))/Lb}·Ton2
ΔIc4={(Vs4+ΔVs4·(3/4))/Lc}·Ton3
ΔId4=Vs4/Ld·Ton4
……(12)
这里,如果各载波周期足够短,则各载波周期的栅极信号G3a、G3b、G3c、G3d的各脉宽即Ton1、Ton2、Ton3、Ton4也基本固定。因此,在各载波周期中,也可以视为Ton=Ton1=Ton2=Ton3=Ton4的关系成立。此外,如果各载波周期相对于交流电压的周期足够短,则整流电压的电压变化量ΔVs1、ΔVs2、ΔVs3也基本相同。因此,也可以视为ΔVs=ΔVs1=ΔVs2=ΔVs3的关系成立。
根据上述(9)~(12)式,第1载波周期至第4载波周期的各相的电流波纹的总和ΔIa’、ΔIb’、ΔIc’、ΔId’能够通过以下的(13)式表示。
ΔIa’={(Vs1+Vs2+Vs3+Vs4+ΔVs·(3/2))/La}·Ton
ΔIb’={(Vs1+Vs2+Vs3+Vs4+ΔVs·(3/2))/Lb}·Ton
ΔIc’={(Vs1+Vs2+Vs3+Vs4+ΔVs·(3/2))/Lc}·Ton
ΔId’={(Vs1+Vs2+Vs3+Vs4+ΔVs·(3/2))/Ld}·Ton
……(13)
这里,在电抗器4a~4d的电感值为La=Lb=Lc=Ld=L的情况下,根据上述(13)式,关于电流波纹的总和,ΔIa’=ΔIb’=ΔIc’=ΔId’。因此,能够抑制电流波纹的偏移。
如以上那样,如果使用图3所示的实施方式1的开关模式,则能够在将载波周期乘以相数得到的平准化周期内抑制电流波纹的偏移。由此,能够在平准化周期中实现电抗器电流的平准化。
另外,图3的开关模式只是一例,不限于此。例如,也可以通过图4所示的开关模式而使转换器电路10进行动作。图4是示出优选在实施方式1的电力转换装置120中使用的开关模式的第2例的图。图4的上段部所示的整流电压Vs的波形与图3所示的整流电压Vs的波形相同。
在图4所示的开关模式的情况下,首先,在第1载波周期中,按照开关元件3a、开关元件3b、开关元件3c、开关元件3d的顺序进行开关控制。在接下来的第2载波周期中,按照开关元件3d,开关元件3a,开关元件3b,开关元件3c的顺序进行开关控制。以下,在第3载波周期中,按照开关元件3c、开关元件3d、开关元件3a、开关元件3b的顺序进行开关控制,在第4载波周期中,按照开关元件3b、开关元件3c、开关元件3d、开关元件3a的顺序进行开关控制。
归纳图4所示的开关模式的特征如下。首先,关于在前次的载波周期的开关控制中第4个即最后输出的栅极信号,在当前的载波周期中成为第1个即最初的栅极信号。此外,在前次的载波周期的开关控制中第1个、第2个和第3个输出的栅极信号在当前的载波周期中分别成为第2个、第3个和第4个栅极信号。换言之,关于当前的载波周期的开关控制的顺序,在前次的载波周期的开关控制中第1个输出的栅极信号成为第4个,在前次的载波周期的开关控制中第1个~第3个输出的栅极信号依次下移,使各个相位分别延迟90°而输出。
虽然省略详细的计算式的提示,但是,根据图4所示的开关模式,也能够在平准化周期中抑制电流波纹的偏移。由此,能够在平准化周期中实现电抗器电流的平准化。
此外,图5是示出优选在实施方式1的电力转换装置120中使用的开关模式的第3例的图。图5的上段部所示的整流电压Vs的波形与图3所示的整流电压Vs的波形相同。
在图5所示的开关模式的情况下,首先,在第1载波周期中,按照开关元件3a、开关元件3b、开关元件3c、开关元件3d的顺序进行开关控制。在接下来的第2载波周期中,按照开关元件3c、开关元件3d、开关元件3a、开关元件3b的顺序进行开关控制。以下,在第3载波周期中,按照开关元件3d、开关元件3c、开关元件3b、开关元件3a的顺序进行开关控制,在第4载波周期中,按照开关元件3b、开关元件3a、开关元件3d、开关元件3c的顺序进行开关控制。
归纳图5所示的开关模式的特征如下。首先,各个单位转换器中脉宽调制信号在载波周期内具有1个脉冲,并且,在将载波周期乘以相数得到的平准化周期内存在相数个脉冲。而且,各个单位转换器的平准化周期内的相数个脉冲在每个载波周期内相位全部不同。
虽然省略详细的计算式的提示,但是,通过图5所示的开关模式,也能够在平准化周期中抑制电流波纹的偏移。由此,能够在平准化周期中实现电抗器电流的平准化。
另外,在图3~5中,例示了单位转换器的数量即单位转换器的相数为4的情况下的开关模式,但不限于此。在单位转换器的相数为4以外的复数个的情况下,也能够例示能够抑制电流波纹的偏移的开关模式。关键点在于,在各个单位转换器中,将载波周期乘以相数得到的平准化周期内的相数个脉冲在每个载波周期内相位全部不同即可。
接着,对用于实现上述实施方式1的控制方法的控制系统进行说明。图6是示出在实施方式1的控制装置200内构成的控制系统30的结构例的框图。图7是示出在图6所示的控制系统30内使用的载波信号的波形例的图。
如图6所示,实施方式1的控制系统30具备基准占空比运算部32、载波信号生成部34、载波信号选择部35、比较器37a、37b、37c、37d。
在图6中,基准占空比运算部32运算基准占空比Dref。基准占空比Dref是用于生成栅极信号G3a、G3b、G3c、G3d的基准信号。根据基准占空比Dref而决定栅极信号G3a、G3b、G3c、G3d的脉宽以及栅极信号G3a、G3b、G3c、G3d的1个载波周期内的相位。基准占空比Dref被输入到比较器37a、37b、37c、37d的各+端子。
载波信号生成部34生成载波信号Car_1、Car_2、Car_3、Car_4。图7中示出4相交错方式的情况下的各载波信号的例子。在4相的情况下,各载波信号间的相位差是90°。因此,载波信号Car_2相对于载波信号Car_1具有90°的相位差。此外,载波信号Car_3相对于载波信号Car_1具有180°的相位差。此外,载波信号Car_4相对于载波信号Car_1具有270°的相位差。
载波信号选择部35逐个地选择载波信号Car_1、Car_2、Car_3、Car_4中的任意1个,并分别分配给载波信号Car_a、Car_b、Car_c、Car_d。载波信号Car_a作为用于生成栅极信号G3a的信号而输入到比较器37a的-端子。载波信号Car_b作为用于生成栅极信号G3b的信号而输入到比较器37b的-端子。载波信号Car_c作为用于生成栅极信号G3c的信号而输入到比较器37c的-端子。载波信号Car_d作为用于生成栅极信号G3d的信号而输入到比较器37d的-端子。
具体而言,在图3的第2载波周期中,选择载波信号Car_4作为载波信号Car_a,选择载波信号Car_1作为载波信号Car_b。此外,选择载波信号Car_2作为载波信号Car_c,选择载波信号Car_3作为载波信号Car_d。另外,在图7中,示出载波信号Car_1~Car_4是反向锯齿波的情况作为一例,但不限于此。载波信号Car_1~Car_4也可以是三角波或锯齿波。
返回图6,比较器37a对基准占空比Dref与载波信号Car_a的振幅值进行比较,输出其比较结果。如图所示,比较器37a的输出成为针对开关元件3a的栅极信号G3a。在其他比较器37b、37c、37d中也进行同样的处理。比较器37b的输出成为针对开关元件3b的栅极信号G3b。此外,比较器37c的输出成为针对开关元件3c的栅极信号G3c。此外,比较器37d的输出成为针对开关元件3d的栅极信号G3d。
接着,对实施方式1中的基准占空比运算部32的结构进行说明。图8是示出实施方式1中的基准占空比运算部32的结构例的图。
如图8所示,基准占空比运算部32具备差分器321、324、电压控制器322、乘法器323、电流控制器325。电压控制器322及电流控制器325的例如是比例积分(ProportionalIntegral:PI)控制器。以下,将电压控制器322及电流控制器325是PI控制器的情况作为一例而进行说明。
差分器321运算预先决定的电容器电压Vdc的指令值Vdc*与电容器电压Vdc的检测值之间的偏差ΔVdc。电压控制器322通过对偏差ΔVdc进行PI控制而生成合计电流Idc的振幅指令值Idcr。
在乘法器323中,对合计电流Idc的振幅指令值Idcr乘以角频率ω(=2πf)的正弦波信号的绝对值|sinωt|。f是交流电源1输出的交流电压的频率,即电源频率。正弦波信号的绝对值|sinωt|是与交流电压vac的相位同步的信号,是基于交流电压vac的检测值而生成的。
差分器324运算作为乘法器323的输出的合计电流Idc的指令值Idc*与合计电流Idc之间的偏差ΔIdc。电流控制器325通过对偏差ΔIdc进行PI控制而生成基准占空比Dref。
如以上说明的那样,实施方式1的电力转换装置具备将从交流电源输出的交流电压转换为直流电压的转换器电路。转换器电路具备数量与多个相的相数相同的单位转换器。电力转换装置基于电流检测器及电压检测器的检测值生成基准占空比,并且基于基准占空比与载波信号的比较结果生成用于控制开关元件的脉宽调制信号。在多个相的相数个单位转换器中,脉宽调制信号在第1周期内具有1个脉冲,并且,在将第1周期乘以相数得到的第3周期内具有相数个脉冲。此外,第3周期内的相数个脉冲在每个第1周期内相位全部不同。由此,能够将第1周期内的相位所引起的电压误差分散于多个第1周期。由此,得到能够抑制制造成本的增加并将电抗器电流平准化这样的效果。
另外,也可以是,关于各个单位转换器的比第3周期内的相数少1的数量的脉冲,后续的脉冲在第1周期内的相位比先行的脉冲提前。或者,关于各个单位转换器的比第3周期内的相数少1的数量的脉冲,后续的脉冲在第1周期内的相位比先行的脉冲滞后。在具有这样的脉冲的开关模式中存在规则性,因此,得到容易生成脉宽调制信号的效果。
在各个单位转换器中,在第3周期内使用的载波信号构成为在每个第1周期内相位全部不同。如果这样构成,则得到容易生成用于将电抗器电流平准化的开关模式的效果。
实施方式2.
在实施方式2中,说明实施方式1中说明的电力转换装置120应用于马达驱动装置的应用例。图9是示出实施方式2的马达驱动装置150的结构例的图。在图9所示的实施方式2的马达驱动装置150中,对图1所示的电力转换装置120的结构追加了逆变器7a和马达7b。
马达7b与逆变器7a的输出侧连接。马达7b是负载设备的一例。逆变器7a将平滑电容器6中蓄积的直流电力转换为交流电力,将转换后的交流电力提供给马达7b,从而驱动马达7b。图9所示的马达驱动装置150能够应用于送风机、压缩机及空调机这样的产品。
图10是示出将图9所示的马达驱动装置150应用于空调机的例子的图。马达7b与马达驱动装置150的输出侧连接,马达7b与压缩元件504连结。压缩机505具备马达7b和压缩元件504。制冷循环部506构成为包含四通阀506a、室内热交换器506b、膨胀阀506c及室外热交换器506d。
在空调机的内部循环的制冷剂的流路构成为从压缩元件504经由四通阀506a、室内热交换器506b、膨胀阀506c、室外热交换器506d,并再次经由四通阀506a而返回压缩元件504。马达驱动装置150接受从交流电源1供给的电力,使马达7b旋转。通过马达7b进行旋转,压缩元件504能够执行制冷剂的压缩动作,使制冷剂在制冷循环部506的内部循环。
根据实施方式2的马达驱动装置150,构成为具备实施方式1的电力转换装置120。由此,在应用了实施方式2的马达驱动装置150的送风机、压缩机和空调机这样的产品中,能够得到实施方式1中说明的效果。
此外,以上的实施方式所示的结构示出一例,可以与其他公知的技术组合,还可以在不脱离主旨的范围内对结构的一部分进行省略、变更。
附图标记说明
1交流电源,3a、3b、3c、3d开关元件,4a、4b、4c、4d电抗器,5a、5b、5c、5d防逆流二极管,6平滑电容器,7a逆变器,7b马达,10转换器电路,12、14连接点,16a、16b电布线,20整流电路,30控制系统,32基准占空比运算部,34载波信号生成部,35载波信号选择部,37a、37b、37c、37d比较器,71、72电压检测器,73电流检测器,100a、100b、100c、100d单位转换器,120电力转换装置,150马达驱动装置,200控制装置,200a处理器,200b存储器,321、324差分器,322电压控制器,323乘法器,325电流控制器,504压缩元件,505压缩机,506制冷循环部,506a四通阀,506b室内热交换器,506c膨胀阀,506d室外热交换器,D21、D22、D23、D24二极管。
- 半导体装置、电力模块和电力转换装置的控制方法
- 空调机组压缩机控制方法、装置、计算机设备和存储介质
- 半导体装置、电力变换装置、驱动装置、车辆及升降机
- 无线送受电系统、具备该系统的电力转换装置以及电力转换方法
- 电力转换装置、具有该电力转换装置的电动机驱动控制装置、具有该电动机驱动控制装置的鼓风机和压缩机、以及具有该送风机或压缩机的空调机
- 电力转换装置、电机驱动控制装置、送风机、压缩机及空调机