医疗器械操纵装置与手术机器人
文献发布时间:2023-06-19 19:18:24
技术领域
本申请涉及医疗器械技术领域,特别是涉及一种医疗器械操纵装置与手术机器人。
背景技术
微创技术旨在减少在手术期间受损的组织量,从而减少患者恢复时间。这种微创技术可以通过患者的自然孔口或通过一个或多个手术切口来执行。
微创技术利用医疗器械(如内窥镜、操作钳等手术器械)进行,采用多自由度关节的机械臂操纵医疗器械,使得医疗器械穿过人体穿刺器(trocar)进入腹腔。并通过机械臂的操控医疗器械围绕一个远程运动中心(也称为RCM点)移动,从而获得所需的姿势和位置。为减小穿刺器受到运动的医疗器械的影响,机械臂一般设置有被动关节,利用被动关节实现的远心运动,自适应穿刺器的位置,不会对穿刺器周围的组织造成额外的伤害,安全性较高。
现有医疗机械臂方案中,在被动关节和医疗器械之间还设置有主动偏转关节或直线运动机构,通过主动偏转关节的小范围转动来实现医疗器械的位姿调整,或者通过直线运动机构来实现图像的放大和缩小功能。然而在重力作用下,内窥镜装置始终存在向腹腔内运动趋势,在主动偏转关节或直线运动机构发生故障而失去约束的情况下,使得医疗器械容易向腹腔内滑动而损伤腔内组织,存在很大的安全隐患。
发明内容
基于此,有必要针对在主动偏转关节或直线运动机构发生故障而失去约束的情况下,使得医疗器械容易向腹腔内滑动,存在很大的安全隐患的问题,提供一种医疗器械操纵装置与手术机器人。
本申请提供一种医疗器械操纵装置,被配置成使医疗器械围绕一个远程运动中心运动,其特征在于,包括:
基座;
第一转接支架,可转动连接于所述基座;
第一主动关节,用于驱动所述第一转接支架相对所述基座旋转;
由所述第一转接支架依次延伸的第一支撑臂、第二支撑臂和器械承载臂,医疗器械设置于所述器械承载臂之上;
第二主动关节,用于驱动所述第一支撑臂相对所述基座摆动;
第三主动关节,用于驱动所述第二支撑臂相对所述第一支撑臂摆动;
第四主动关节,用于驱动所述第二支撑臂旋转;
被动关节,设置于所述器械承载臂与第二支撑臂之间,以使所述器械承载臂跟随第二支撑臂的位置而摆动;
第五主动关节,用于驱动所述器械承载臂旋转,且所述器械承载臂的旋转轴线经过一个远程运动中心;
所述第一支撑臂的摆动轴线垂直于第一转接支架的转动轴线,所述第二支撑臂的摆动轴线垂直于第一支撑臂的摆动轴线;
所述第二支撑臂的旋转轴线和器械承载臂的旋转轴线交汇于所述器械承载臂的摆动轴线。
本申请还提供一种手术机器人,包括:
如上述内容所述的医疗器械操纵装置;
主操作台,用于控制所述医疗器械操纵装置。
本申请涉及一种医疗器械操纵装置与手术机器人,通过第一支撑臂和第二支撑臂的摆动和旋转以及被动关节,实现围绕远程运动中心各个方向的摆动和医疗器械的直线运动,满足手术时不同视野和图像缩小放大的需求,且便于内窥镜从病人体内直线抽出,无需额外增加直线运动机构。从而在被动关节和医疗器械之间无需再增加主动关节和直线运动机构,使得医疗器械不存在向腹腔内运动的趋势,即使第一主动关节至第四主动关节发生故障而失去对被动关节的支撑,被动关节也会被拖动向远离穿刺器的方向移动而使医疗器械有退出腹腔的趋势,避免损伤腔内组织,提高安全性。
附图说明
构成本申请的一部分的附图用来提供对本申请的进一步理解,使得本申请的其它特征、目的和优点变得更明显。本申请的示意性实施例附图及其说明用于解释本申请,并不构成对本申请的不当限定。
图1为本申请一实施例提供的医疗器械操纵装置中臂状结构的立体图。
图2为本申请一实施例提供的医疗器械操纵装置的整体结构示意图。
图3为本申请一实施例提供的医疗器械操纵装置中臂状结构另一状态的立体图。
图4为本申请一实施例提供的医疗器械操纵装置中被动关节和第五主动关节的爆炸图。
图5为本申请一实施例提供的医疗器械操纵装置中夹持装置的立体图。
图6为本申请一实施例提供的医疗器械操纵装置中升降装置和把手的立体图。
附图标记:
100-医疗器械操纵装置;111-基座;112-第一转接支架;
120-第一主动关节;121-第一致动器;113-第一支撑臂;
114-第二支撑臂;115-器械承载臂;116-第二转接支架;
130-第二主动关节;131-第二致动器;140-第三主动关节;
141-第三致动器;150-第四主动关节;151-第四致动器;
160-被动关节;161-转轴;162-附加编码器;170-第五主动关节;
171-摆动块;172-罩壳;173-第五致动器;200-夹持装置;
210-底座;211-滑槽;220-第一夹装件;221-第一V形槽;
230-第二夹装件;231-第二V形槽;240-调节丝杠;241-正向作用部;
242-反向作用部;243-操作部;250-第一螺母;260-第二螺母;
310-台车;311-脚轮;320-升降装置;321-丝杠传动机构;
322-升降电机;323-活动架;324-支柱;325-直线导轨;326-框架;
330-把手;400-医疗器械。
具体实施方式
为了使本申请的目的,技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
本申请提供一种医疗器械操纵装置100。要说明的是,本申请提供的医疗器械操纵装置100的可以应用于任何类型的医疗器械400上,例如,操作钳,分离钳等手术器械和内窥镜。
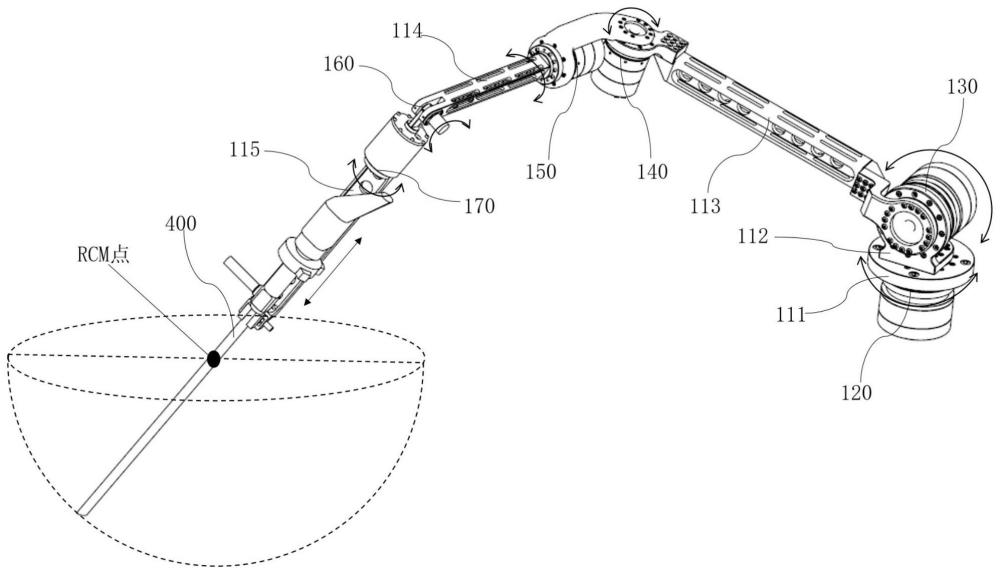
如图1所示,在本申请的一实施例中,所述医疗器械操纵装置100100被配置成使医疗器械400围绕一个远程运动中心(即RCM点)运动,所述医疗器械操纵装置100包括:基座111,第一转接支架112,第一主动关节120,第一支撑臂113,第二支撑臂114,器械承载臂115,第二主动关节130,第三主动关节140,第四主动关节150,被动关节160和第五主动关节170。
具体的,第一转接支架112可转动连接于所述基座111。由所述第一转接支架112依次延伸有第一支撑臂113,第二支撑臂114和器械承载臂115,以形成臂状结构。第一支撑臂113转动连接至第一转接支架112,医疗器械400设置于所述器械承载臂115之上。
第一主动关节120用于驱动所述第一转接支架112相对所述基座111旋转。第二主动关节130用于驱动所述第一支撑臂113相对所述基座111摆动。第三主动关节140用于驱动所述第二支撑臂114相对所述第一支撑臂113摆动。第四主动关节150用于驱动所述第二支撑臂114旋转。被动关节160设置于所述器械承载臂115与第二支撑臂114之间,以使所述器械承载臂115跟随第二支撑臂114的位置而摆动。第五主动关节170用于驱动所述器械承载臂115旋转,且所述器械承载臂115的旋转轴161线经过一个远程运动中心(即RCM点)。
需要说明的是,主动关节表示由致动器驱动转动,被动关节160表示无致动器驱动转动。
所述第一支撑臂113的摆动轴线垂直于第一转接支架112的转动轴线。所述第二支撑臂114的摆动轴线垂直于第一支撑臂113的摆动轴线,使得第一支撑臂113和第二支撑臂114在两个相垂直的平面内摆动。所述第二支撑臂114的旋转轴161线和器械承载臂115的旋转轴161线交汇于所述器械承载臂115的摆动轴线,且第二支撑臂114的旋转轴161线和器械承载臂115的旋转轴161线分别垂直于器械承载臂115的摆动轴线。
在本实施例中,通过第一支撑臂113和第二支撑臂114的摆动和旋转以及被动关节160,实现围绕远程运动中心各个方向的摆动和医疗器械400的直线运动,摆动角度为0至90°,直线运动距离为0mm至240mm,满足手术时不同视野和图像缩小放大的需求,且便于内窥镜从病人体内直线抽出,无需额外增加直线运动机构。从而在被动关节160和医疗器械400之间无需再增加主动关节和直线运动机构,使得医疗器械400不存在向腹腔内运动的趋势,即使第一主动关节120至第四主动关节150发生故障而失去对被动关节160的支撑,被动关节160也会被拖动向远离穿刺器的方向移动而使医疗器械400有退出腹腔的趋势,避免损伤腔内组织,提高安全性。
此外,由于无需额外增加直线运动机构,减小医疗器械操纵装置100末端空间尺寸,且减轻末端重量。
由于临床上内窥镜孔与两个器械孔一般采用倒三角布置,内窥镜装置必须在主刀医生腋下靠前位置。本申请中第二支撑臂114的摆动轴线垂直于第一支撑臂113的摆动轴线,在医疗器械操纵装置100在支撑内窥镜时,使得第一支撑臂113和第二支撑臂114构成的一部分臂,能够在水平方向上从操作者后方绕过操作者的腋下靠前位置,避免与操作者的位置干涉。此种布置与临床上手持内窥镜临床手术站位完全一致,从而不会改变手术站位等其他临床手术所需设施。
此外,本申请结合各主动关节和被动关节160的相互转动关系,运用图像识别算法控制各个关节运动,即跟踪手术器械图像识别自适应定位病灶位置。当然,也可由操作者主动控制医疗器械操纵装置100的动作。
如图1所示,在本申请一实施例中,所述第二支撑臂114的转动轴线垂直于第二支撑臂114的摆动轴线。
在本实施例中,由于第二支撑臂114直接连接被动关节160,通过设计第二支撑臂114同时具有转动和摆动自由度,使得第二支撑臂114能够直接调节被动关节160的位置和角度,从而使得第二支撑臂114小范围的调整,能够使得器械承载臂115能够获得较大的位姿变化,避免第二支撑臂114的大幅度摆动影响操作者的操作,且能够获得较大的手术操作范围。
如图3所示,在本申请一实施例中,第一主动关节120包括第一致动器121,第一致动器121固定至基座111,且第一致动器121的输出轴与第一转接支架112连接。第一致动器121驱动第一转接支架112转动,转动的角度范围-180°至+180°。
如图3所示,在本申请一实施例中,第二主动关节130包括第二致动器131,第二致动器131固定至第一转接支架112,且第二致动器131的输出轴与第一支撑臂113连接。第二致动器131驱动第一支撑臂113相对第一转接支架112摆动,摆动的角度范围-110°至+110°。
如图3所示,在本申请一实施例中,所述医疗器械操纵装置100还包括第二转接支架116,第二转接支架116一端转动连接至所述第一支撑臂113,所述第二支撑臂114转动连接至第二转接支架116另一端。
所述第三主动关节140包括:第三致动器141,固定至所述第一支撑臂113远离第二主动关节130的一端,且第三致动器141的输出轴与第二转接支架116连接,从而第三致动器141驱动第二转接支架116相对第一支撑臂113摆动,进而第二转接支架116带动第二支撑臂114同步摆动,摆动的角度范围-70°至170°。
所述第四主动关节150包括:第四致动器151,固定至所述第二转接支架116,且第四致动器151的输出轴与第二支撑臂114一端连接。第三致动器141驱动第二支撑臂114相对第二转接支架116转动,转动的角度范围-180°至+180°。
如图3和图4所示,在本申请一实施例中,被动关节160位于第二支撑臂114远离第四关节的一端。所述被动关节160包括:转轴161和附加编码器162。
转轴161转动连接于所述第二支撑臂114的端部,所述器械承载臂115直接或间接止转连接至所述转轴161。器械承载臂115通过第一主动关节120,第二主动关节130,第三主动关节140和第四主动关节150转动与RCM点支撑相互运动,实现器械承载臂115被动以转轴161的中心线为轴线摆动,摆动的角度范围±115°。
附加编码器162固定至第二支撑臂114,其输入轴与所述转轴161的轴线重合,且附加编码器162的输入轴与所述转轴161止转连接,用于检测转轴161的转动方向和转动角度。
如图3和图4所示,在本申请一实施例中,所述第五主动关节170包括:摆动块171,罩壳172和第五致动器173。摆动块171固定套装于所述转轴161,两者之间可通过销钉固定或花键连接。罩壳172固定连接至所述摆动块171,且所述器械承载臂115可转动连接至所述罩壳172。第五致动器173固定设置于所述罩壳172内,其输出轴与器械承载臂115连接,用于驱动所述器械承载臂115相对罩壳172转动,转动的角度范围-180°至+180°。
在本实施例中,通过器械承载臂115控制医疗器械400自转,例如内窥镜,能够扩大手术视野范围。
需要说明的是,以上转动角度和摆动角度的基准0位,是以所有臂的中心线成一条直线为基准。
本申请中的致动器包括电机,电机驱动器和编码器。其中电机产生旋转驱动力的装置。电机驱动器通过调整提供给电机的电流量来控制电机的旋转速度,在电机驱动器的控制下,电机被驱动以生成对应于来自控制单元的转矩命令值的转矩。编码器至少用于检测电机的旋转轴161的旋转角度。
可选的,致动器还包括减速器,减速器连接到电机的旋转轴161,将电机的旋转轴161的旋转速度以预定的减速比减速,并将结果传动到输出轴,通过输出轴驱动后级构件。
当然,本申请中的致动器也可采用液压马达或气动马达。
在本申请一实施例中,所述医疗器械操纵装置100还包括:附加主动关节。
附加主动关节设置于所述第二主动关节130和第三主动关节140之间,用于驱动所述第一支撑臂113相对所述第一转接支架112转动,以使所述第一支撑臂113的转动轴线垂直于所述第一支撑臂113的摆动轴线。
附加主动关节和第二主动关节130的布置方式与第三主动关节140,第二转接支架116和第四主动关节150部分的结构形式类似,不另作附图说明。
在本实施例中,通过增加第一支撑臂113的转动自由度,使得第一支撑臂113小范围的调整,能够使得第二支撑臂114和器械承载臂115能够获得较大的位姿变化,避免第一支撑臂113的大幅度摆动影响操作者的操作,且手术操作范围更大。
如图3和图5所示,在本申请一实施例中,所述医疗器械操纵装置100还包括夹持装置200,用于将医疗器械400相对固定至所述器械承载臂115。
所述夹持装置200包括:底座210,第一夹装件220和第二夹装件230。
底座210固定连接于所述器械承载臂115。第一夹装件220滑动连接于所述底座210,并设置有第一V形槽221。第二夹装件230滑动连接于所述底座210,并设置有与所述第一V形槽221相对应的第二V形槽231。
当两个夹装件相互靠近时,所述第一V形槽221和第二V形槽231相互配合以定位医疗器械400的中心线与器械承载臂115的转动方向同轴。
具体的,第一V形槽221的夹角范围为115°至145°,优选值为130°。第二V形槽231的夹角范围为115°至145°,优选值为130°。
在本实施例中,采用V形槽的定位方式,使得本申请的夹持装置200,可以夹Φ2-Φ10mm直径不同的医疗器械400,通用性好,减少手术准备工作。
如图5所示,在本申请一实施例中,所述夹持装置200还包括调节丝杠240,第一螺母250和第二螺母260。
调节丝杠240转动连接于所述底座210,且所述调节丝杠240设置为具有正向螺牙的正向作用部241,具有反向螺牙的反向作用部242和操作部243。所述操作部243位于所述底座210外部。所述底座210设置有滑槽211,所述正向作用部241和反向作用部242分别位于所述滑槽211内。
第一螺母250固定连接至第一夹装件220,且第一螺母250螺接于正向作用部241。第二螺母260固定连接至第二夹装件230,且第一螺母250螺接于反向作用部242。第一螺母250和第二螺母260分别嵌入至所述滑槽211中。
在本实施例中,通过转动操作部243,带动正向作用部241和反向作用部242同步转动,从而夹装件相互同速靠近以夹紧医疗器械400。由于调节丝杠240具有自锁功能,夹紧后不会松动,操作便捷。
如图2和图6所示,在本申请一实施例中,所述医疗器械操纵装置100还包括:台车310和升降装置320。
台车310被配置为具有多个脚轮311。升降装置320固定于所述台车310,用于驱使所述基座111升降动作。
具体的,升降装置320包括框架326,丝杠传动机构321,升降电机322,活动架323和直线导轨325。
框架326固定连接至台车310,用于提供丝杠传动机构321的支撑。丝杠传动机构321固定安装于框架326,基座111通过多根支柱324固定至活动架323,升降电机322驱动丝杠传动机构321以推动活动架323升降,从而实现臂状结构的整体升降,满足不同手术场景对高度的需求。直线导轨325竖直布置,在活动架323升降过程中进行导向,以维持活动架323升降的稳定性。
所述医疗器械操纵装置100还包括把手330。把手330固定连接至台车310或升降装置320,通过推动或者拉动把手330使台车310的脚轮311滚动,可实现医疗器械操纵装置100整体位移。
本申请还提供一种手术机器人。
在本申请一实施例中,手术机器人包括如前述内容所述的医疗器械操纵装置100和主操作台,主操作台用于控制所述医疗器械操纵装置100。
以上所述实施例的各技术特征可以进行任意的组合,各方法步骤也并不做执行顺序的限制,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请的保护范围应以所附权利要求为准。
- 用于在手术期间保持医疗器械的3D打印的机器人以及其控制
- 机器人研磨系统、机器人系统、研磨装置、吸盘装置、驱动部件及压力产生装置
- 一种气动自动操纵装置及其操纵方法
- 操纵装置、方法及存储介质、医疗装置及手术机器人
- 操纵装置、方法及存储介质、医疗装置及手术机器人