一种磁辅助手术机器人
文献发布时间:2023-06-19 19:21:53
技术领域
本发明属于手术器械技术领域,具体为一种磁辅助手术机器人。
背景技术
腹腔镜手术是一种微创手术,传统的腹腔镜手术,需要在腹部开多个切口,以便内窥镜、手术器械能够进入腹腔进行手术操作,随着科技的发展,高精度和高稳定性的手术机器人逐渐被广泛使用,可使医生可以远离手术台即可进行手术。
专利CN210228310U公开了一种腹腔镜手术机器人,包括:举升机构,举升机构顶部设置有一横推机构,横推机构的端部设置有一旋转机构;旋转机构上设置有多个关节机械臂,多个关节机械臂的端部皆设置有一安装托架,任一安装托架上设置有一腹腔镜机构,其余安装托架上皆设置有一手术刀机构,该专利所提供的腹腔镜手术机器人,手术刀机构和腹腔镜机构能够从同一切口进去待手术的地方,有效地减少患者的创伤,也可以通过各自的切口进去待手术的地方进行不同的手术,同时,由于在手术时不存在手部颤动,在狭窄腔体内的操作更加灵活、准确,操控范围大,改进了腔镜下的缝合技术,操作者不易疲劳,完成高难度的复杂手术更加轻松;专利CN209074881U公开了一种腹腔镜手术持镜机器人系统,包括台车机架、手术工具以及机械臂,由于机械臂具有至少六个自由度,因此机械臂能够完全模仿人体手臂的运动范围,其灵活性与人体的手臂无异,从而将实际需要操作的病灶位置精确地进行定位而无需医生进行辅助操作。
上述专利通过机器人进行腹腔镜的手术,但由于在使用机器人为患者体内的组织进行手术时,为了保持患者体内手术组织的稳定性,仍需要从患者的体表开设新的创口,以将夹持钳等手术器械伸入到患者体内并对患者的组织进行夹持和翻动等操作,而额外开设的创口会为患者带来痛苦的同时,会使患者的术后恢复产生不良影响。
公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
发明内容
本发明的目的在于提供一种磁辅助手术机器人,以解决现有技术的上述问题。
为实现上述目的,本发明提供了一种磁辅助手术机器人,包括手术机器人主体,所述手术机器人主体上设置有若干能够自由活动的机械臂,其中一个所述机械臂的末端安装有磁吸板,所述磁吸板的底端通过磁力吸附有磁性夹钳,所述磁性夹钳包括能够滞留在人体内的钳体、铰接在所述钳体首端的活动夹头、滑动连接在所述活动夹头尾端内部位置处的抵杆以及固定在所述活动夹头尾端的端盖,所述磁性夹钳通过递送钳送入到人体内并在人体内与所述递送钳相分离,所述递送钳包括主体呈杆状结构的钳杆、铰接在所述钳杆末端的活动钳柄以及套设在所述活动钳柄内并能够沿所述活动钳柄活动的推杆,当将所述磁性夹钳安装到所述钳体的首端时,所述推杆的首端与所述抵杆的末端相抵。
在本发明的技术方案中,所述钳体呈圆柱体结构,所述钳体的首端设有固定夹头,所述固定夹头与所述活动夹头形成的整体能够将患者的组织夹持,所述钳体首端的内部位置处开设有空腔,所述活动夹头的尾端铰接在所述空腔内。
在本发明的技术方案中,所述活动夹头的尾端设有呈弧形状的抵板,所述抵杆的首端抵在所述抵板的外侧表面上,所述活动夹头的尾端还设置有铰轴,所述铰轴与所述钳体之间固定有扭簧,所述铰轴的端部插入到所述空腔的内壁中并与所述钳体转动连接。
在本发明的技术方案中,所述空腔的前侧端面与所述钳体的前端面呈连通状,所述钳体的后侧外表面上开设有避空槽,所述避空槽与所述空腔相连通,所述抵板的末端伸入到所述避空槽内。
在本发明的技术方案中,所述钳体的尾端开设有滑动腔,所述抵杆的外围表面上设有凸环,位于所述凸环下方的所述抵杆外围处套设有回位弹簧,所述回位弹簧放置在所述滑动腔的内部,所述凸环伸入到所述滑动腔内并与所述钳体滑动连接,所述回位弹簧的头部将所述滑动腔的腔底贯穿并伸向所述活动夹头。
在本发明的技术方案中,所述端盖的顶端开设有呈通透状的通孔,所述抵杆的尾部套设在所述通孔内并与所述端盖滑动连接,位于所述通孔口部外侧的所述端盖尾端面上开设有环槽,所述环槽内嵌设有环形磁铁,所述端盖尾端的外围表面上开设有外螺纹。
在本发明的技术方案中,所述钳杆为空心管状结构,所述钳杆的首端与所述端盖的尾端螺纹连接,所述钳杆尾端外围表面的底部位置处开设有凹腔,所述推杆套设在所述钳杆内,所述推杆的尾端伸入到所述凹腔内并固定有推板,所述推板能够在所述凹腔内活动。
在本发明的技术方案中,所述钳杆尾端的底部位置处设置有活动钳柄,所述活动钳柄的外侧表面上固定有一对凸座,所述活动钳柄的顶端从两个所述凸座之间穿过并与所述凸座转动连接。
在本发明的技术方案中,所述活动钳柄的顶端设有拨板,所述拨板的末端能够与所述推板的尾端面相抵。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
1、本发明中,通过设置能够被磁吸板吸附的磁性夹钳,使得将磁性夹钳置入人体内并将人体内的组织进行夹持后,可使用手术机器人主体控制磁吸板在人体的外侧将磁性夹钳吸附,使人体内被磁性夹钳夹持的组织能够直接在磁性夹钳的作用下被夹持,无需额外开设创口并从该创口处对患者的组织进行夹持以及翻动等操作。
2、本发明中,通过将磁性夹钳安装达到递送钳的首端,使得递送钳能够利用现有的创口将磁性夹钳送入到患者体内,当磁性夹钳将患者的体内组织夹持后可将磁性夹钳从递送钳上拆下并移出,使磁性夹钳单独被留在患者的体内,可无需在患者身体上额外开设创口的情况下将磁性夹钳送入到患者体内,减少创口的数量,加快患者的恢复速度。
附图说明
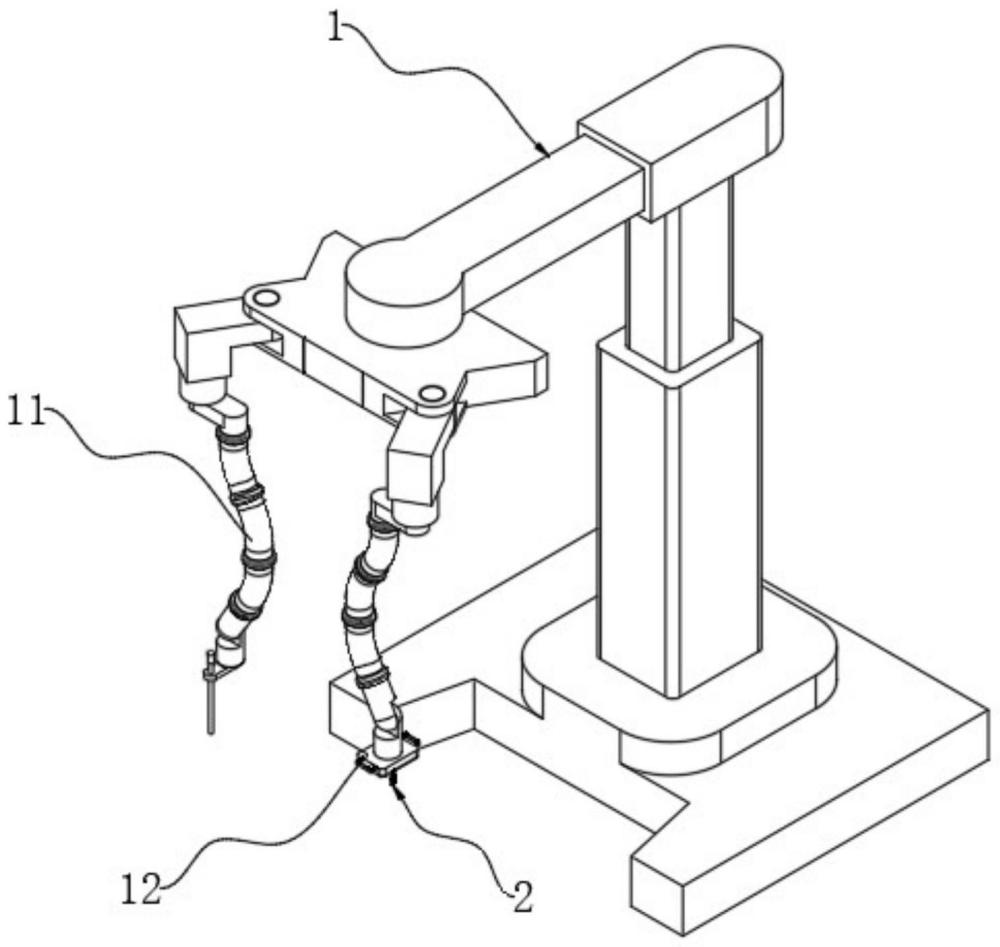
图1为本发明的整体结构示意简图;
图2为本发明中磁性夹钳的结构图;
图3为本发明中磁性夹钳的剖视图;
图4为本发明中磁性夹钳的爆炸图;
图5为本发明中钳体的剖视图;
图6为本发明中活动夹头的结构图;
图7为本发明中抵杆的结构图;
图8为本发明中端盖的爆炸图;
图9为本发明中磁性夹钳的安装示意图;
图10为本发明中递送钳的爆炸图;
图11为本发明中钳杆的结构图。
附图标记说明:
1-手术机器人主体;11-机械臂;12-磁吸板;
2-磁性夹钳;21-钳体;211-固定夹头;212-空腔;2121-避空槽;213-滑动腔;22-活动夹头;221-抵板;222-铰轴;223-扭簧;23-抵杆;231-凸环;232-回位弹簧;24-端盖;241-通孔;242-环槽;243-环形磁铁;244-外螺纹;
3-递送钳;31-钳杆;311-固定钳柄;312-凸座;313-凹腔;32-活动钳柄;321-拨板;33-推杆;331-推板。
具体实施方式
下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
除非另有其他明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其他元件或其他组成部分。
参照图1-图11,本发明的磁辅助手术机器人,包括手术机器人主体1,手术机器人主体1上设置有若干能够自由活动的机械臂11,其中一个机械臂11的末端安装有磁吸板12,磁吸板12的底端通过磁力吸附有磁性夹钳2,当将磁性夹钳2置入到患者体内时,手术机器人主体1通过磁吸板12可在患者的外侧使用磁力控制磁性夹钳2在患者体内进行运动。
本发明中,磁性夹钳2整体使用不锈钢材料制成,磁性夹钳2包括能够滞留在人体内的钳体21、铰接在钳体21首端的活动夹头22、滑动连接在活动夹头22尾端内部位置处的抵杆23以及固定在活动夹头22尾端的端盖24,磁性夹钳2能够通过现有开设的创口从患者的体外递送至患者的体内,免除额外开设的创口,有利于患者后期的恢复。
具体的,钳体21呈圆柱体结构,钳体21的首端设有固定夹头211,固定夹头211与活动夹头22形成的整体能够将患者的组织夹持,钳体21首端的内部位置处开设有空腔212,活动夹头22的尾端设置有铰轴222,铰轴222呈纵向将活动夹头22贯穿,使活动夹头22的尾端在铰轴222的作用下铰接在空腔212内,从而使活动夹头22能够在钳体21的首端进行摆动,当活动夹头22靠近固定夹头211时,活动夹头22与固定夹头211能够将患者的组织夹持,当活动夹头22远离固定夹头211时,活动夹头22和固定夹头211会从夹持组织的状态脱离,使磁性夹钳2能够与组织分离。
进一步的,铰轴222与钳体21之间固定有扭簧223,在扭簧223的弹力作用下,使得活动夹头22始终与固定夹头211相抵,从而使得能够在无外力的作用时,磁性夹钳2的头部始终能够将组织进行夹持。
此外,活动夹头22的尾端设有呈弧形状的抵板221,铰轴222的端部插入到空腔212的内壁中并与钳体21转动连接,空腔212的前侧端面与钳体21的前端面呈连通状,空腔212为活动夹头22提供活动空间,钳体21的后侧外表面上开设有避空槽2121,避空槽2121与空腔212相连通,抵板221的末端伸入到避空槽2121内,使得活动夹头22在绕铰轴222活动时,活动夹头22带动抵板221的活动不会受到钳体21的阻碍,从而使活动夹头22的运动不会受到影响。
值得注意的是,钳体21的尾端开设有滑动腔213,抵杆23的外围表面上设有凸环231,位于凸环231下方的抵杆23外围处套设有回位弹簧232,回位弹簧232放置在滑动腔213的内部,凸环231伸入到滑动腔213内并与钳体21滑动连接,回位弹簧232的头部将滑动腔213的腔底贯穿并伸向活动夹头22,抵杆23的首端抵在抵板221的外侧表面上,在回位弹簧232的弹力作用下,抵杆23的首端始终远离抵板221,当抵杆23受到按压朝向活动夹头22的方向运动时,抵杆23的首端会抵在抵板221的外表面并使抵板221带动活动夹头22绕铰轴222转动,从而使活动夹头22远离固定夹头211,使磁性夹钳2的头部处于张开状态,以便使磁性夹钳2对患者的体内组织进行夹持。
值得说明的是,端盖24遮盖在抵杆23的尾端,可使抵杆23被限制在钳体21的内部,防止抵杆23从钳体21中脱出,端盖24的顶端开设有呈通透状的通孔241,抵杆23的尾部套设在通孔241内并与端盖24滑动连接,位于通孔241口部外侧的端盖24尾端面上开设有环槽242,环槽242内嵌设有环形磁铁243,当将磁性夹钳2置入到患者体内后,通过将磁吸板12贴合到患者的皮肤处即可使磁吸板12能够在磁力的作用下隔着患者的体表而被吸附到磁吸板12上,使得手术机器人主体1在控制磁吸板12沿患者皮肤表面运动时,磁性夹钳2能够在患者的体内跟随磁吸板12一同运动,从而使磁吸板12控制磁性夹钳2对患者的组织进行位移等操作,使得磁性夹钳2能够在无需额外开设创口的情况下在患者的体内对患者的组织进行各种夹持、翻动等操作,为患者的后续恢复减少负担。
上述方案中,为了方便将磁性夹钳2通过现有的创口送入到患者的体内,可将磁性夹钳2通过递送钳3送入到人体内,递送钳3在将磁性夹钳2送入到患者体内后能够在患者体内与磁性夹钳2分离,使磁性夹钳2滞留在患者的体内,以便使用磁吸板12进行后续的操作,端盖24尾端的外围表面上开设有外螺纹244,递送钳3包括主体呈杆状结构的钳杆31、铰接在钳杆31末端的活动钳柄32以及套设在活动钳柄32内并能够沿活动钳柄32活动的推杆33,通过将端盖24外端的外螺纹244旋在钳杆31的首端上即可使端盖24被安装到钳杆31上,从而使递送钳3能够方便地将磁性夹钳2通过已有的创口送入到患者的体内。同时,当将磁性夹钳2安装到钳体21的首端时,推杆33的首端与抵杆23的末端相抵。
具体的,钳杆31为空心管状结构,钳杆31的首端与端盖24的尾端螺纹连接,钳杆31尾端外围表面的底部位置处开设有凹腔313,推杆33套设在钳杆31内,推杆33的尾端伸入到凹腔313内并固定有推板331,推板331被限制在凹腔313中,当推动推板331时,推板331能够在凹腔313内进行活动,从而使推板331带动推杆33沿钳杆31进行运动,当推板331带动推杆33从钳杆31的首端向外伸出时,推杆33的首端会对抵杆23的末端产生推力,使抵杆23朝向活动夹头22的方向运动,进而可使活动夹头22打开,此时将活动夹头22与固定夹头211夹在患者组织的边缘处并松开推板331即可使抵杆23在回位弹簧232的弹力作用下恢复原位,使活动夹头22与固定夹头211将组织夹住,同时推杆33被抵杆23顶回。
进一步的,钳杆31尾端的底部位置处设置有活动钳柄32,活动钳柄32的外侧表面上固定有一对凸座312,活动钳柄32的顶端从两个凸座312之间穿过并与凸座312转动连接,活动钳柄32的顶端设有拨板321,拨板321的末端能够与推板331的尾端面相抵,使得医护人员在握持固定钳柄311后,通过向后拉扯活动钳柄32即可使活动钳柄32通过拨板321向前推动推板331,以达到打开活动夹头22的目的。
此外,当磁性夹钳2将患者体内组织夹持后,通过旋转递送钳3,可使磁性夹钳2在外螺纹244的作用下逐渐与钳杆31的首端脱离,从而达到分离磁性夹钳2和递送钳3的目的,使递送钳3能够从患者体内抽出并将磁性夹钳2留在患者的体内。
本发明的磁辅助手术机器人的工作原理具体为:首先将磁性夹钳2安装到钳杆31的首端后,使用递送钳3将磁性夹钳2通过现有开设的创口送入到患者的体内,然后当磁性夹钳2靠近患者体内的组织后,通过向后拉扯活动钳柄32,使活动钳柄32顶端的拨板321推动推板331,此时推板331会带动推杆33沿钳杆31向外伸出并对推动抵杆23,使抵杆23的首端对抵板221产生推动,从而使抵板221拨动活动夹头22使活动夹头22远离固定夹头211,使磁性夹钳2首端处于张开状态,最后将张开后的磁性夹钳2靠近患者的组织并松开活动钳柄32,使抵杆23在回位弹簧232的弹力作用下恢复原位并将推杆33推回到钳杆31内,此时活动夹头22会在扭簧223的弹力作用下将患者的组织夹持在固定夹头211上,使磁性夹钳2将组织进行夹持,接着旋动递送钳3使递送钳3与磁性夹钳2分离后,磁性夹钳2被滞留在患者体内,此时手术机器人主体1可控制磁吸板12沿患者皮肤表面运动,使磁性夹钳2能够在患者的体内在磁力的作用下跟随磁吸板12一同运动,从而使磁吸板12控制磁性夹钳2对患者的组织进行位移等操作,使得磁性夹钳2能够在无需额外开设创口的情况下在患者的体内对患者的组织进行各种夹持、运动等操作,为患者的后续恢复减少负担。
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。