一种智能太阳能供电机器人
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及供电机器人技术领域,具体为一种智能太阳能供电机器人。
背景技术
随着科技的发展,机器人在社会中的应用越来越广泛,机器人在很多领域都发挥了重要作用,为人类生活带来了极大的便利和改善,机器人一般离不开电能的使用,因此在一些充电不方便的地方会使用到智能太阳能供电机器人,目前现有的智能太阳能供电机器人一般有行走平台和太阳能发电单元组成,太阳能发电板一般会直接安装到行走平台的上表面,进而太阳能发电板单层安装且倾斜角度一般不能进行调节,因此不利于太阳的直射,进而发电效率较低供电效果一般,也有能进行多层发电的,但太阳能发电板一般缺少防护,在搬运或者移动过程中,太阳能发电板存在被磕碰的风险,进而影响自身的安全性,为此,我们提出一种智能太阳能供电机器人。
发明内容
本发明要解决的技术问题是克服现有的缺陷,提供一种智能太阳能供电机器人,设有多块太阳能发电板并分层设置同时能进行角度调节,发电效果好,并且能对太阳能发电板进行防护使用安全性高,可以有效解决背景技术中的问题。
为实现上述目的,本发明提供如下技术方案:一种智能太阳能供电机器人,包括行走平台和驱动单元;
行走平台:其上表面的中部设有支撑座,支撑座的右端设有剪叉臂,剪叉臂的左下端与支撑座滑动连接,剪叉臂内部的左端设有均匀分布的太阳能发电板,行走平台上表面的左前侧设有光伏控制器,行走平台上表面的左后侧设有蓄电池;
驱动单元:设置于支撑座的左端,驱动单元与剪叉臂的左端固定连接;
其中:还包括控制器,所述控制器设置于支撑座上表面的右侧,太阳能发电板的输出端电连接光伏控制器的输入端,光伏控制器的输出端电连接蓄电池的输入端,蓄电池的输出端电连接控制器的输入端,行走平台的输入端电连接控制器的输出端,在一个的行走平台可以安装多层太阳能发电板,同时在使用的过程中可以自动对太阳能发电板的倾斜角度进行调节,增大太阳光的入射角度,进而提高了发电效率,机器人有有良好的供电效果,并且在剪叉臂收合后,防护板可以自动收合到太阳能发电板的上方,进而可以对太阳能发电板进行防护,提高了太阳能供电机器人自身的安全性。
进一步的,所述驱动单元包括齿轮和齿条,所述齿条对称设置于支撑座前后两侧面的左端,齿轮对称设置于剪叉臂左下端的前后两侧,齿轮分别与相邻的齿条啮合连接,方便剪叉臂的控制。
进一步的,所述驱动单元包括移动壳、蜗杆和蜗轮,所述移动壳滑动连接于支撑座的前端,移动壳内部的右端通过轴承转动连接有蜗杆,蜗轮设置于剪叉臂的左前端,蜗杆与蜗轮啮合连接,蜗轮和前侧的齿轮均位于移动壳的内部,剪叉臂的左前端与移动壳前侧面的圆孔转动连接,可以进行自锁和减速。
进一步的,所述驱动单元包括电机,所述电机通过电机座设置于移动壳的上表面,电机的输出轴与蜗杆的上端固定连接,电机的输入端电连接控制器的输出端,给剪叉臂的控制提供了动力。
进一步的,所述支撑座的前侧面开设有矩形滑孔,移动壳的后侧面设有滑块,滑块与矩形滑孔滑动连接,提升了移动壳移动的稳定性。
进一步的,所述剪叉臂的前侧面设有单轴倾角传感器,单轴倾角传感器与太阳能发电板平行设置,单轴倾角传感器的输出端电连接控制器的输入端,方便太阳能发电板倾斜角度的检测。
进一步的,所述剪叉臂的右上端设有支撑轴,支撑轴的外弧面与防护板右端的转孔转动连接,方便太阳能发电板的防护。
进一步的,所述剪叉臂的右端转动连接有绳套,绳套的外弧面设有连接绳,连接绳的上端延伸出防护板右端的通孔并在端头处设有挡杆,控制防护板的打开。
进一步的,所述剪叉臂的左上端设有定位轴,定位轴与防护板配合设置,支撑轴的前后两端对称活动套接有扭簧,扭簧的上端均延伸出防护板下端的右侧,扭簧的下端均延伸出剪叉臂右上端的下方,控制防护板的关闭。
与现有技术相比,本发明的有益效果是:本智能太阳能供电机器人,具有以下好处:
1、发电时太阳光照射到多块太阳能发电板上,太阳能发电板将太阳内转换为电能并输送给光伏控制器,光伏控制器将太阳能发电板发出来的电进行变换后并输送给蓄电池,蓄电池对电能进行储存,将外部的用电设备的插头与控制器的插孔进行连接,进而蓄电池通过控制器对外部设备进行供电,在使用的过程中可以利用剪叉臂对多块太阳能发电板进行分层支撑,在一个的行走平台可以安装多层太阳能发电板,进而提高了发电效率,机器人有有良好的供电效果。
2、可以根据使用需求对太阳能发电板的倾斜角度进行设置,控制器对倾斜的角度进行自动调节,调节时控制器控制电机运转,电机的输出轴带动蜗杆旋转,蜗杆通过蜗轮带动剪叉臂左侧的下转轴进行旋转,剪叉臂左侧的下转轴带动齿轮旋转,旋转的齿轮与不可移动的齿条啮合连接,进而齿轮将带动左侧的下转轴沿支撑座的长滑孔进行滑动,剪叉臂右侧的下转轴不能移动但会与剪叉臂的连杆发生相对转动,进而剪叉臂将进行折合或者展开,剪叉臂自左向右向上倾斜的连杆将带动太阳能发电板进行同步移动,进而实现太阳能发电板角度的调节,并且相邻交叉的两个连杆通过短转轴转动连接,同时短转轴与自左向右向上倾斜的连杆固定同步旋转,单轴倾角传感器与前侧下端的短转轴固定连接,进而单轴倾角传感器可以与太阳能发电板进行同步的倾斜,因此单轴倾角传感器可以对太阳能发电板的倾斜角度进行测量并输送给控制器,方便控制器对太阳能发电板角度的控制,同时在使用的过程中可以自动对太阳能发电板的倾斜角度进行调节,增大太阳光的入射角度,提升太阳能发电板自身的发电效率,自动调节使用便利好。
3、在不使用时电机可以驱动剪叉臂进行折合,剪叉臂的高度将变低,多块太阳能发电板将会进行叠放,同时剪叉臂右上端的长转轴与支撑轴之间的距离将变小,连接绳将逐渐松弛,然后扭簧驱使防护板绕支撑轴进行逆时针旋转,进行防护板与定位轴接触停止旋转,在剪叉臂收合后,防护板可以自动收合到太阳能发电板的上方,进而可以对太阳能发电板进行防护,提高了太阳能供电机器人自身的安全性。
附图说明
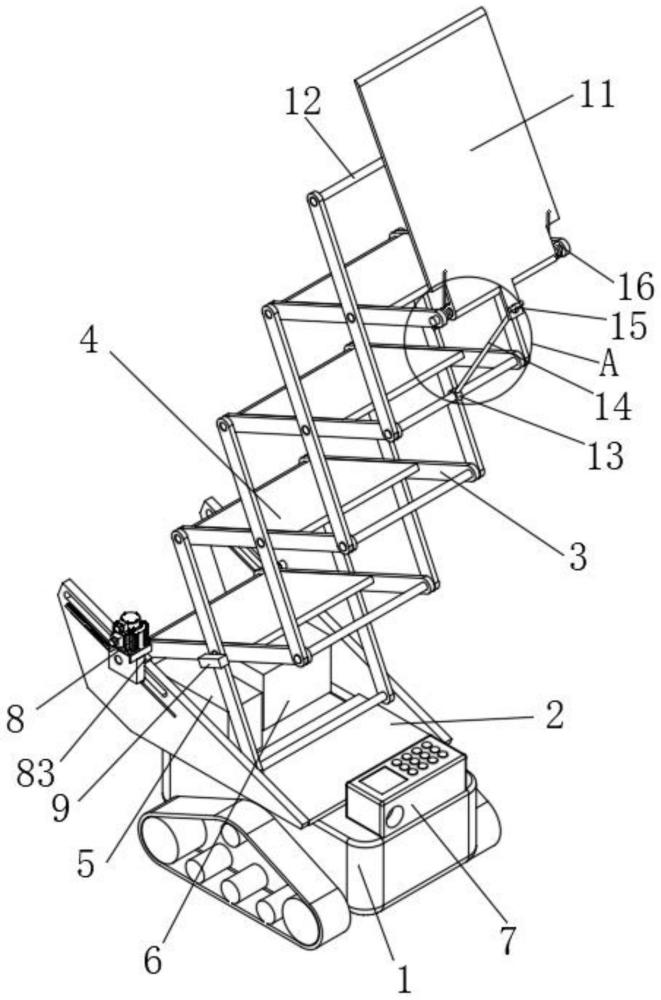
图1为本发明结构示意图;
图2为本发明移动壳的结构示意图;
图3为本发明A处放大结构示意图;
图4为本发明驱动单元的剖视结构示意图;
图5为本发明B处放大结构示意图。
图中:1行走平台、2支撑座、3剪叉臂、4太阳能发电板、5光伏控制器、6蓄电池、7控制器、8驱动单元、81齿轮、82齿条、83移动壳、84蜗杆、85蜗轮、86电机、9单轴倾角传感器、10支撑轴、11防护板、12定位轴、13绳套、14连接绳、15挡杆、16扭簧、17滑块、18矩形滑孔。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-5,本实施例提供一种技术方案:一种智能太阳能供电机器人,包括行走平台1和驱动单元8;
行走平台1:其上表面的中部设有支撑座2,行走平台1给上方的零部件提供了安装位置,同时方便带动上方零部件的移动,支撑座2的右端设有剪叉臂3,剪叉臂3的左下端与支撑座2滑动连接,剪叉臂3内部的左端设有均匀分布的太阳能发电板4,剪叉臂3由前后两侧臂、长转轴和下转轴组成,单组侧臂由多组十字交叉的连杆和短转轴组成,两个十字交叉的连杆通过短转轴转动连接,十字交叉的连杆与上方对应的十字交叉的连杆通过长转轴首尾相连,同时长转轴的前端分别与前侧臂的两个连杆转动连接,长转轴的后端分别与后侧臂的两个连杆转动连接,最下方前后两组十字交叉连杆的下端之间左右两侧均转动连接有下转轴,右侧的下转轴与支撑座2固定连接,左侧的下转轴与支撑座2滑动连接,左侧的下转轴沿支撑座2进行滑动,剪叉臂3右侧的下转轴不能移动但会与剪叉臂3的连杆发生相对转动,进而剪叉臂3将进行折合或者展开,剪叉臂3自左向右向上倾斜的连杆将带动太阳能发电板4进行同步移动,进而实现太阳能发电板4角度的调节,行走平台1上表面的左前侧设有光伏控制器5,行走平台1上表面的左后侧设有蓄电池6,剪叉臂3的前侧面设有单轴倾角传感器9,单轴倾角传感器9与太阳能发电板4平行设置,单轴倾角传感器9的输出端电连接控制器7的输入端,同时短转轴与自左向右向上倾斜的连杆固定同步旋转,单轴倾角传感器9与前侧下端的短转轴固定连接,进而单轴倾角传感器9可以与太阳能发电板4进行同步的倾斜;
驱动单元8:设置于支撑座2的左端,驱动单元8与剪叉臂3的左端固定连接,驱动单元8包括齿轮81和齿条82,齿条82对称设置于支撑座2前后两侧面的左端,齿轮81对称设置于剪叉臂3左下端的前后两侧,齿轮81分别与相邻的齿条82啮合连接,驱动单元8包括移动壳83、蜗杆84和蜗轮85,移动壳83滑动连接于支撑座2的前端,移动壳83内部的右端通过轴承转动连接有蜗杆84,蜗轮85设置于剪叉臂3的左前端,蜗杆84与蜗轮85啮合连接,蜗轮85和前侧的齿轮81均位于移动壳83的内部,剪叉臂3的左前端与移动壳83前侧面的圆孔转动连接,移动壳83给蜗杆84提供了安装位置同时保证蜗杆84能随剪叉臂3的左下端同步移动,驱动单元8包括电机86,电机86通过电机座设置于移动壳83的上表面,电机86的输出轴与蜗杆84的上端固定连接,电机86的输入端电连接控制器7的输出端,电机86运转,电机86的输出轴带动蜗杆84旋转,蜗杆84通过蜗轮85带动剪叉臂3左侧的下转轴进行旋转,剪叉臂3左侧的下转轴带动齿轮81旋转,旋转的齿轮81与不可移动的齿条82啮合连接,进而齿轮81将带动左侧的下转轴沿支撑座2的长滑孔进行滑动,支撑座2的前侧面开设有矩形滑孔18,移动壳83的后侧面设有滑块17,滑块17与矩形滑孔18滑动连接,滑块17和矩形滑孔18增强了移动壳83移动的稳定性;
其中:剪叉臂3的右上端设有支撑轴10,支撑轴10的外弧面与防护板11右端的转孔转动连接,剪叉臂3的右端转动连接有绳套13,绳套13的外弧面设有连接绳14,绳套13方便连接绳14与剪叉臂3右上端的长转轴的连接,连接绳14的上端延伸出防护板11右端的通孔并在端头处设有挡杆15,挡杆15方便了连接绳14与防护板11的连接,剪叉臂3的左上端设有定位轴12,定位轴12与防护板11配合设置,支撑轴10的前后两端对称活动套接有扭簧16,扭簧16的上端均延伸出防护板11下端的右侧,扭簧16的下端均延伸出剪叉臂3右上端的下方,在不使用时电机86可以驱动剪叉臂3进行折合,剪叉臂3的高度将变低,多块太阳能发电板4将会进行叠放,同时剪叉臂3右上端的长转轴与支撑轴10之间的距离将变小,连接绳14将逐渐松弛,然后扭簧16驱使防护板11绕支撑轴10进行逆时针旋转,进行防护板11与定位轴12接触停止旋转,此时防护板11将位于太阳能发电板4的上方进行防护;
其中:还包括控制器7,控制器7设置于支撑座2上表面的右侧,太阳能发电板4的输出端电连接光伏控制器5的输入端,光伏控制器5的输出端电连接蓄电池6的输入端,蓄电池6的输出端电连接控制器7的输入端,发电时太阳光照射到多块太阳能发电板4上,太阳能发电板4将太阳内转换为电能并输送给光伏控制器5,光伏控制器5将太阳能发电板4发出来的电进行变换后并输送给蓄电池6,蓄电池6对电能进行储存,将外部的用电设备的插头与控制器7的插孔进行连接,进而蓄电池6通过控制器7对外部设备进行供电,行走平台1的输入端电连接控制器7的输出端,单轴倾角传感器9可以对太阳能发电板4的倾斜角度进行测量并输送给控制器7,方便控制器7对太阳能发电板4角度的控制,通过控制器7对行走平台1进行调控,驱使其带动上方的零部件进行移动。
本发明提供的一种智能太阳能供电机器人的工作原理如下:发电时太阳光照射到多块太阳能发电板4上,太阳能发电板4将太阳内转换为电能并输送给光伏控制器5,光伏控制器5将太阳能发电板4发出来的电进行变换后并输送给蓄电池6,蓄电池6对电能进行储存,将外部的用电设备的插头与控制器7的插孔进行连接,进而蓄电池6通过控制器7对外部设备进行供电,可以根据使用需求对太阳能发电板4的倾斜角度进行设置,控制器7对倾斜的角度进行自动调节,调节时控制器7控制电机86运转,电机86的输出轴带动蜗杆84旋转,蜗杆84通过蜗轮85带动剪叉臂3左侧的下转轴进行旋转,剪叉臂3左侧的下转轴带动齿轮81旋转,旋转的齿轮81与不可移动的齿条82啮合连接,进而齿轮81将带动左侧的下转轴沿支撑座2的长滑孔进行滑动,剪叉臂3右侧的下转轴不能移动但会与剪叉臂3的连杆发生相对转动,进而剪叉臂3将进行折合或者展开,剪叉臂3自左向右向上倾斜的连杆将带动太阳能发电板4进行同步移动,进而实现太阳能发电板4角度的调节,并且相邻交叉的两个连杆通过短转轴转动连接,同时短转轴与自左向右向上倾斜的连杆固定同步旋转,单轴倾角传感器9与前侧下端的短转轴固定连接,进而单轴倾角传感器9可以与太阳能发电板4进行同步的倾斜,因此单轴倾角传感器9可以对太阳能发电板4的倾斜角度进行测量并输送给控制器7,方便控制器7对太阳能发电板4角度的控制,同理在不使用时电机86可以驱动剪叉臂3进行折合,剪叉臂3的高度将变低,多块太阳能发电板4将会进行叠放,同时剪叉臂3右上端的长转轴与支撑轴10之间的距离将变小,连接绳14将逐渐松弛,然后扭簧16驱使防护板11绕支撑轴10进行逆时针旋转,进行防护板11与定位轴12接触停止旋转,此时防护板11将位于太阳能发电板4的上方进行防护,然后通过控制器7对行走平台1进行调控,驱使其带动上方的零部件进行移动。
值得注意的是,以上实施例中所公开的行走平台1、太阳能发电板4、光伏控制器5、蓄电池6、控制器7、电机86和单轴倾角传感器9均可根据实际应用场景自由配置,行走平台1可选用型号为NavigatorL1的履带式平台,控制器7的核心芯片可选用型号为STM32H743的单片机,电机86可选用型号为SST59D3305的步进电机,单轴倾角传感器9可选用型号为JK11/PM-TSI-90的单轴倾角传感器,控制器7控制行走平台1、光伏控制器5、电机86和单轴倾角传感器9工作采用现有技术中常用的方法。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种野外景区智能太阳能供电厕所
- 一种基于太阳能供电的智能割胶机器人
- 一种环保智能化太阳能供电机器人