同步带轮输入式行星摆臂轮组结构以及移动机器人平台
文献发布时间:2023-06-19 19:27:02
技术领域
本发明涉及石油与天然气开采技术领域,具体地,涉及一种同步带轮输入式行星摆臂轮组结构以及移动机器人平台。
背景技术
石油天然气是我国工业发展的重要能源,也是经济发展的重要推动力。随着我国国民经济的不断发展,对能源的需求量也不断增长,在我国的能源消费构成中,石油天然气的比重不断上升。现如今,油气资源的获取主要是通过矿源开采和资源进口两种途径,但油气资源的产地和集散地往往远离消费地,利用长输管道以及油气场站连接产地与消费地成为了油气资源分配的重要方式。油气场站作为油气运输管线的重要组成部分,在管网工程中起着骨架作用,在保证油气输送平稳安全运行中发挥着重要的作用。场站内有众多复杂分布的运输管线、存储罐,加工处理油气资源的设备,以及监测运输介质状态的仪器仪表。其内的油气介质一般都处于高压的状态,储量比较大且易燃易爆,加工处理的工艺流程相对集中,人员出入频繁。一旦由于场站内设备故障或者管道断裂破损而引起油气泄露,不仅造成资源的浪费,甚至可能造成中毒、火灾、爆炸等危险事故,造成巨大的生命财产损失。因此,及时对场站内的设备运行状态以及仪器仪表实时数据进行安全检测与数据采集,是保证场站长期稳定的处于安全状态,维护场站运行质量的重要举措。
由于油气场站的检测任务多样,包括气体泄漏、设备振动状态、现场仪表数据、以及阀门启闭状态等检测任务,检测环境复杂,检测实时性、准确性、可靠性、安全性要求高。因此,针对油气场站特殊的检测环境,实现多种传感器融合检测,实现机器人精确的自动巡检与自动续航以及实现多种采集数据融合远程传输处理及安全隐患主动预警等技术问题是研制自动巡检特种机器人的关键技术问题。
申请号为“JP2009-234534”、名称为“移动机器人”的日本专利公开了一种移动机器人结构,通过对称布置在车体四个角落的四套相同的复合式轮腿机构实现在复杂地形上的移动。该复合式轮腿机构包括两个车轮、车轮架、支撑腿,两个车轮铰接安装在车轮架的两端,支撑腿的一端与车轮架的中心铰接,支撑腿的另一端与车体铰接。通过主动控制支撑腿与车体之间的角度姿态、车轮架与支撑腿之间的角度姿态,达到不同的轮腿结构变形,从而实现对包括楼梯在内的复杂地形的移动。然而,该移动机器人虽然兼具轮式结构的高移动性能和腿式结构的离散跨越性能,但是在跨越楼梯或高台时,需要对分布在车体四个角落的四套支撑腿车轮架等的每个关节进行主动姿态调整,调整参数过多过程过于复杂,因此限制了该移动机器人在复杂地形下的移动效率,制约了其普及性的应用。
发明内容
本发明的目的在于解决现有技术存在的上述不足中的至少一项。例如,本发明的目的之一在于提供一种调整能力大、能够更好适应复杂地形的同步带轮输入式行星摆臂轮组结构。又如,本发明的另一目的在于提供一种调整能力大、能够更好适应复杂地形、能够形成多点接触地形、具备较高的稳定性移动机器人平台。
为了实现上述目的,本发明的一方面提供了一种同步带轮输入式行星摆臂轮组结构,所述行星摆臂轮组结构包括输入主轴组件、第一行星摆臂组件、第二行星摆臂组件、第一车轮组件和第二车轮组件,其中,
所述第一行星摆臂组件和第二行星摆臂组件都包括第一摆臂支架、第二摆臂支架、摆臂输入同步带轮、同步带和摆臂输出同步带轮,其中,
第一摆臂支架和第二摆臂支架构成内部中空的壳体,在壳体上设置有贯穿的壳体的第一安装孔、第二安装孔和第三安装孔,摆臂输入同步带轮、同步带和摆臂输出同步带轮均设置在壳体中,且摆臂输入同步带轮与第二安装孔同轴设置,摆臂输出同步带轮与第三安装孔同轴设置,同步带套设在摆臂输入同步带轮和摆臂输出同步带轮上;
第一行星摆臂组件和第二行星摆臂组件并列设置且第一行星摆臂组件上的第一安装孔和第三安装孔分别与第二行星摆臂组件上的第三安装孔和第一安装孔位置相互对应;
第一车轮组件和第二车轮组件都包括车轮和车轮转轴,第一车轮组件和第二车轮组件的车轮转轴的一端进入所述第一安装孔中,另一端进入所述第三安装孔且与所述摆臂输出同步带轮同轴固定设置;
输入主轴组件包括输入同步带轮和输入主轴,输入主轴的一端分别穿过第一行星摆臂组件和第二行星摆臂组件上的第二安装孔并与第一行星摆臂组件和第二行星摆臂组件中的摆臂输入同步带轮同轴固定设置;
所述输入同步带轮套设在输入主轴的另一端上且固定设置。
在本发明一方面的一个示例性实施例中,所述行星摆臂轮组结构还可包括轮组支架组件,所述轮组支架组件固定设置在所述第一行星摆臂轮组和/或第二行星摆臂轮组上,所述轮组支架组件能够使以将行星摆臂轮组结构与移动机器人平台的主体框架实现转轴固定连接。
在本发明一方面的一个示例性实施例中,所述轮组支架组件可包括轮组支架和摆臂安装支架,所述摆臂安装支架固定设置在所述第一行星摆臂轮组和/或第二行星摆臂轮组的壳体上,所述轮组支架套设在所述摆臂安装支架上并能够相对摆臂安装支架沿其轴向旋转。
在本发明一方面的一个示例性实施例中,所述轮组支架组件还可包括轮组支架轴承组件,所述轮组支架轴承组件包括支架轴承隔套、支架轴承安装盖和支架轴承,其中,
所述支架轴承隔套套设在所述摆臂安装支架上,所述支架轴承设置在支架轴承隔套和所述轮组支架内部,所述支架轴承安装盖将所述支架轴承封闭。
在本发明一方面的一个示例性实施例中,所述支架轴承隔套套设在输入主轴上且一端固定设置在第一行星摆臂组件的壳体上。
在本发明一方面的一个示例性实施例中,所述第一行星摆臂轮组和第二行星摆臂轮组还可包括摆臂输出轴、第一摆臂输出轴承、第二摆臂输出轴承和摆臂输出轴承端盖,其中,
所述摆臂输出轴一端轴向设置在摆臂输出同步带轮中所述第一车轮组件和第二车轮组件的车轮转轴的另一端通过摆臂输出轴与第一行星摆臂轮组和第二行星摆臂轮组上的第三安装孔实现转轴连接,所述摆臂输出轴承端盖将摆臂输出轴未与车轮转轴连接的一端封闭。
在本发明一方面的一个示例性实施例中,所述第一行星摆臂轮组和第二行星摆臂轮组还可包括摆臂输出轴和摆臂输出轴承组件,其中,
所述摆臂输出轴的一端穿过摆臂输出同步带轮与摆臂输出同步带轮固定连接,另一端与所述第一车轮组件和第二车轮组件的车轮转轴固定连接。
在本发明一方面的一个示例性实施例中,所述摆臂输出轴承组件可包括第一摆臂输出轴承、第二摆臂输出轴承和摆臂输出轴承端盖,其中,
所述第一摆臂输出轴承和第二摆臂输出轴承分别位于摆臂输出同步带轮两侧,第一步摆臂输出轴承套设在摆臂输出轴上且作用在第一摆臂支架上,第二摆臂输出轴承套设在摆臂输出轴上且作用在第一摆臂支架上;
所述摆臂输出轴承端盖将第一摆臂输出轴承封闭。
在本发明一方面的一个示例性实施例中,所述第一行星摆臂轮组和第二行星摆臂轮组还可包括摆臂车轮支撑轴和摆臂车轮支撑轴承组件,其中,
所述摆臂车轮支撑轴设置在第一安装孔中并与第一车轮组件和第二车轮组件的车轮转轴固定连接;
所述摆臂车轮支撑轴承组件套设在所述摆臂车轮支撑轴上并作用在第一行星摆臂轮组和第二行星摆臂轮组上。
在本发明一方面的一个示例性实施例中,所述车轮转轴可包括行星齿轮箱和车轮支撑轴承组件,所述行星齿轮箱轴向设置在车轮中,所述车轮支撑轴承组件设置在行星齿轮箱和车轮之间。
本发明的另一方面提供了一种移动机器人平台,所述移动机器人平台可包括如上任意一项所述的同步带轮输入式行星摆臂轮组结构。
在本发明另一方面的一个示例性实施例中,所述移动机器人平台能够越障摆臂轮组结构车轮0.8直径倍以下的障碍物,能够连续爬坡或越障,能够爬越坡度为50°以下的斜坡。
在本发明另一方面的一个示例性实施例中,所述移动机器人平台可通过电机进行驱动,所述电机与主轴组件连接输入动力使第一车轮组件和第二车轮组件成为主动轮进行同步运动,实现驱动平台的功能,该平台具备轮式移动平台的高移动性能特征,且同步带轮输入式行星摆臂轮组结构能够实现第一车轮组件和第二车轮组件在移动机器人平台自重下自动调整轮组姿态,适应地形。
在本发明另一方面的一个示例性实施例中,所述移动机器人平台可包括在平台主体框架上分布的四组以上的行星摆臂轮组结构,通过多组行星摆臂轮组结构实现对移动机器人平台的整体姿态调整,形成多点接触地形,增强移动机器人平台的越障稳定性。
与现有技术相比,本发明的有益效果包括以下内容中的至少一项:
(1)本发明提供了一种同步带轮输入式行星摆臂轮组结构,采用的同步带轮式输入式行星摆臂轮组结构,其调整能力远大于普通悬挂车轮的作用,能够更好地适应复杂地形,轮式结构相比履带式或足式具备较高的运动效率;
(2)本发明提供了一种移动机器人平台,通过在移动机器人平台的平台主体框架上分布四组以上的同步带轮输入式行星摆臂轮组结构能够进入油气集气站、钻井现场及处理厂等场所的开展巡检任务,对检测的场所的地面状况不需要处理;
(3)该移动机器人平台通过多组结构的布置,能够实现对平台整体的姿态调整,且能够形成多点接触地形,增强移动平台越障稳定性,进一步保护搭载的传感设备,具备更好的运动稳定性;
(4)该移动机器人平台能够越障摆臂轮0.8直径倍以下的障碍物,同时可以实现连续爬坡或越障,并能够爬越50°以下的斜坡。
附图说明
通过下面结合附图进行的描述,本发明的上述和其他目的和/或特点将会变得更加清楚,其中:
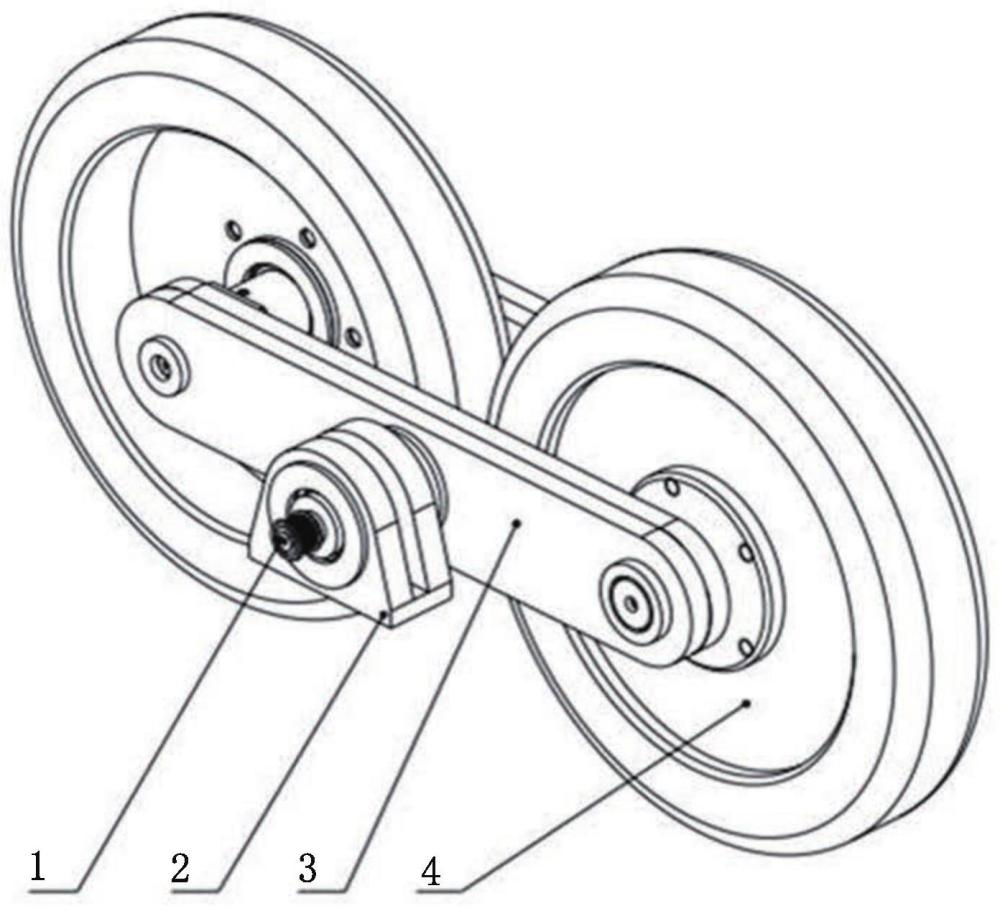
图1示出了本发明的一个示例性实施例的同步带轮输入式行星摆臂轮组结构的结构示意图;
图2示出了图1的剖视图。
附图标记说明:
1-输入主轴组件、101-输入同步带轮、102-输入主轴、103-第一主轴端盖、104-第二主轴端盖、2-轮组支架组件、201-轮组支架、202-支架轴承、203-支架轴承隔套、204-支架轴承安装盖、205-支架支撑轴承、206-支架支撑轴承隔套、207-摆臂安装支架、3-行星摆臂组件、301-第一摆臂支架、302-第二摆臂支架、303-摆臂输入同步带轮、304-同步带、305-摆臂输出同步带轮、306-第一摆臂输出轴承、307-第二摆臂输出轴承、308-摆臂输出轴承端盖、309-摆臂输出轴、310-第一摆臂车轮支撑轴承、311-第二摆臂车轮支撑轴承、312-摆臂支撑轴承隔套、313-第一摆臂主轴支撑轴承、314-第二摆臂主轴支撑轴承、315-摆臂车轮支撑轴、316-摆臂支撑轴承端盖、4-车轮组件、401-车轮、402-行星齿轮箱、403-车轮支撑轴承、404-车轮支撑轴承端盖。
具体实施方式
在下文中,将结合示例性实施例来详细说明本发明的同步带轮输入式行星摆臂轮组结构以及移动机器人平台。
在本发明的第一示例性实施例中,同步带轮输入式行星摆臂轮组结构主要包括输入主轴组件、行星摆臂组件和车轮组件。其中,行星摆臂组件包括第一行星摆臂组件和第二行星摆臂组件,车轮组件包括第一车轮组件和第二车轮组件。
其中,第一行星摆臂组件和第二行星摆臂组件都包括第一摆臂支架、第二摆臂支架、摆臂输入同步带轮、同步带和摆臂输出同步带轮。
其中,第一摆臂支架和第二摆臂支架构成内部中空的壳体。例如,第一摆臂支架和第二摆臂支架的结构可为壳体沿长度方向在上下两个侧面的中轴线剖开形成。在壳体的左端部、中部和右端部开设有贯穿的第一摆臂支架和第二摆臂支架的第一安装孔、第二安装孔和第三安装孔。摆臂输入同步带轮、同步带和摆臂输出同步带轮均设置在壳体中。其中,摆臂输入同步带轮与第二安装孔同轴设置并能够相对壳体沿第二安装孔的轴线转动。摆臂输出同步带轮与第三安装孔同轴设置并能够相对壳体沿第三安装孔的轴线转动。同步带套设在摆臂输入同步带轮和摆臂输出同步带轮上以使摆臂输出同步带轮和摆臂输入同步带轮同步旋转。
第一行星摆臂组件和第二行星摆臂组件并列设置,使得第一行星摆臂组件的第一安装孔与第二行星摆臂组件的第三安装孔位置相互对应;第一行星摆臂组件的第三装孔与第二行星摆臂的第一安装孔位置相互对应;第一行星摆臂组件的第二安装孔与第二行星摆臂组件的第二安装孔位置相互对应。
第一车轮组件和第二车轮组件都包括车轮和车轮转轴。第一车轮组件的车轮转轴的一端进入第一行星摆臂组件上的第一安装孔内形成转轴连接。第一车轮组件的车轮转轴的另一端进入第二行星摆臂组件上的第三安装孔内,与第二行星摆臂组件中的摆臂输出同步带轮同轴固定连接,在所述摆臂输出同步带轮的带动下一同旋转。同理,第二车轮组件的车轮转轴的一端进入第二行星摆臂组件上的第三安装孔形成转轴连接。并且第二车轮组件的车轮转轴的另一端进入第一行星摆臂组件上的第一安装孔内,与第一行星摆臂组件中的摆臂输出同步带轮同轴固定连接,在所述摆臂输出同步带轮的带动下一同旋转。
输入主轴组件包括输入同步带轮和输入主轴。输入主轴的一端分别穿过第一行星摆臂组件上的第二安装孔以及第一行星摆臂组件中的摆臂输入同步带轮;同时,输入主轴的一端继续穿过第二行星摆臂组件上的第二安装孔以及第二行星摆臂组件中的摆臂输入同步带轮。输入主轴分别和第一行星摆臂组件中的摆臂输入同步带轮以及第二行星摆臂组件中的摆臂输入同步带轮固定设置以带动该两个同步带轮同步旋转。输入同步带轮固定套设在输入主轴的另一端上以带动输入主轴旋转。
在本示例性实施例中,所述行星摆臂轮组结构还可包括轮组支架组件,所述轮组支架组件固定设置在所述第一行星摆臂轮组和/或第二行星摆臂轮组上,所述轮组支架组件能够使行星摆臂轮组结构与移动机器人平台的主体框架实现转轴连接。这里,轮组支架组件可包括轮组支架和摆臂安装支架。摆臂安装支架固定设置在第一行星摆臂轮组和/或第二行星摆臂轮组的壳体上,所述轮组支架套设在所述摆臂安装支架上并能够相对摆臂安装支架沿其轴向旋转,移动机器人平台的主体框架与轮组支架固定连接。
进一步地,轮组支架组件还可包括轮组支架轴承组件,轮组支架轴承组件包括支架轴承隔套、支架轴承安装盖和支架轴承。其中,支架轴承隔套套设在摆臂安装支架上,支架轴承设置在支架轴承隔套和轮组支架内部,支架轴承安装盖将支架轴承封闭。例如,支架轴承隔套套设在输入主轴上且一端固定设置在第一行星摆臂组件的壳体上。
在本示例性实施例中,第一行星摆臂轮组和第二行星摆臂轮组还可包括摆臂输出轴、第一摆臂输出轴承、第二摆臂输出轴承和摆臂输出轴承端盖。
其中,摆臂输出轴的一端轴向设置在摆臂输出同步带轮中,第一车轮组件和第二车轮组件的车轮转轴的另一端通过摆臂输出轴与第一行星摆臂轮组和第二行星摆臂轮组上的第三安装孔实现转轴连接,所述摆臂输出轴承端盖将摆臂输出轴未与车轮转轴连接的一端封闭。
在本示例性实施例中,所述第一行星摆臂轮组和第二行星摆臂轮组还可包括摆臂车轮支撑轴和摆臂车轮支撑轴承组件。
其中,摆臂车轮支撑轴设置在第一安装孔中并与第一车轮组件和第二车轮组件的车轮转轴未与摆臂输出轴连接的一端固定连接。摆臂车轮支撑轴承组件套设在摆臂车轮支撑轴上并作用在第一行星摆臂轮组和第二行星摆臂轮组上。例如,摆臂车轮支撑轴承组件可包括第一摆臂车轮支撑轴承、第二摆臂车轮支撑轴承和摆臂支撑轴承端盖,第一摆臂车轮支撑轴承套设在摆臂车轮支撑轴上并作用在第一摆臂支架上,第二摆臂车轮支撑轴承套设在摆臂车轮支撑轴上并作用在第二摆臂支架上。
在本示例性实施例中,所述车轮转轴可包括行星齿轮箱和车轮支撑轴承组件,所述行星齿轮箱轴向设置在车轮中,所述车轮支撑轴承组件设置在行星齿轮箱和车轮之间。
在本示例性实施例中,所述车轮转轴可包括行星齿轮箱、车轮支撑轴承组件和摆臂车路支撑轴承组件,所述行星齿轮箱轴向设置在车轮中,所述车轮支撑轴承组件设置在行星齿轮箱和车轮之间将行星齿轮箱和车轮固定。这里,车轮上沿轴向设置有安装行星齿轮箱的安装孔,行星齿轮箱固定设置在所述安装孔中。
图1示出了本发明的一个示例性实施例的同步带轮输入式行星摆臂轮组结构的结构示意图;图2示出了图1的剖视图。
在本发明的第二示例性实施例中,如图1和图2中所示,同步带轮输入式行星摆臂轮组结构主要包括输入主轴组件1、行星摆臂组件3和车轮组件4。其中,行星摆臂组件3包括第一行星摆臂组件和第二行星摆臂组件,车轮组件4包括第一车轮组件和第二车轮组件。
其中,如图2中所示,第一行星摆臂组件和第二行星摆臂组件都包括第一摆臂支架301、第二摆臂支架302、摆臂输入同步带轮303、同步带304和摆臂输出同步带轮305。
其中,第一摆臂支架301和第二摆臂支架302构成内部中空的壳体。例如,第一摆臂支架和第二摆臂支架的结构可为条形盒体沿长度方向在上下两个侧面的中轴线剖开形成,壳体的左右两端可为圆弧曲面。在壳体的左端部、中部和右端部开设有贯穿的第一摆臂支架301和第二摆臂支架302的第一安装孔、第二安装孔和第三安装孔。摆臂输入同步带轮303、同步带304和摆臂输出同步带轮305均设置在壳体中。摆臂输入同步带轮303和摆臂输出同步带轮305上均轴向设置有贯穿的开孔。其中,摆臂输入同步带轮303与第二安装孔同轴设置并能够相对壳体沿第二安装孔的轴线转动。摆臂输出同步带轮305与第三安装孔同轴设置并能够相对壳体沿第三安装孔的轴线转动。同步带304套设在摆臂输入同步带轮303和摆臂输出同步带轮305上以使摆臂输出同步带轮305和摆臂输入同步带轮303同步旋转。
如图1和2中所示,第一行星摆臂组件和第二行星摆臂组件并列设置,使得第一行星摆臂组件的第一安装孔与第二行星摆臂组件的第三安装孔位置相互对应;第一行星摆臂组件的第三装孔与第二行星摆臂的第一安装孔位置相互对应;第一行星摆臂组件的第二安装孔与第二行星摆臂组件的第二安装孔位置相互对应。
如图2中所示,第一车轮组件和第二车轮组件都包括车轮401和车轮转轴。第一车轮组件的车轮转轴的一端进入第一行星摆臂组件上的第一安装孔内形成转轴连接。第一车轮组件的车轮转轴的另一端进入第二行星摆臂组件上的第三安装孔内,与第二行星摆臂组件中的摆臂输出同步带轮同轴固定连接,在所述摆臂输出同步带轮的带动下一同旋转。同理,第二车轮组件的车轮转轴的一端进入第二行星摆臂组件上的第三安装孔形成转轴连接。并且第二车轮组件的车轮转轴的另一端进入第一行星摆臂组件上的第一安装孔内,与第一行星摆臂组件中的摆臂输出同步带轮同轴固定连接,在所述摆臂输出同步带轮的带动下一同旋转。
如图2中所示,输入主轴组件1包括输入同步带轮101和输入主轴102。输入主轴102的一端分别穿过第一行星摆臂组件上的第二安装孔以及第一行星摆臂组件中的摆臂输入同步带轮;同时,输入主轴102的一端继续穿过第二行星摆臂组件上的第二安装孔以及第二行星摆臂组件中的摆臂输入同步带轮。输入主轴102分别穿过第一行星摆臂组件中的摆臂输入同步带轮303以及第二行星摆臂组件中的摆臂输入同步带轮303上的开孔并与其固定设置从而带动该两个同步带轮同步旋转。输入同步带轮101固定套设在输入主轴的另一端上以带动输入主轴102旋转。例如,通过动力装置带动输入同步带轮旋转从而带动输入主轴旋转。这里,输入主轴组件1还包括第一主轴端盖103和第二主轴端盖104,第一主轴端盖103设置在输入主轴102与输入同步带轮101连接的一端的端部。第二主轴端盖104设置在输入主轴102穿过第二行星摆臂组件的第二安装孔的一端的端部。这里,设置第一主轴端盖和第二主轴端盖是为了保护主轴的旋转部位,防止旋转部位外露受到损坏。
在本示例性实施例中,如图2中所示,所述行星摆臂轮组结构还可包括轮组支架组件2,所述轮组支架组件2固定设置在所述第一行星摆臂轮组和/或第二行星摆臂轮组上,所述轮组支架组件能够使行星摆臂轮组结构与移动机器人平台的主体框架实现转轴连接。这里,轮组支架组件2可包括轮组支架201和摆臂安装支架207。摆臂安装支架207固定设置在第一行星摆臂轮组和/或第二行星摆臂轮组的壳体上,所述轮组支架201套设在所述摆臂安装支架207上并能够相对摆臂安装支架207沿其轴向旋转。移动机器人平台的主体框架与轮组支架201固定连接。
进一步地,轮组支架组件2还可包括轮组支架轴承组件,轮组支架轴承组件包括支架轴承隔套203、支架轴承安装盖204和支架轴承202。其中,支架轴承隔套203套设在摆臂安装支架207上,支架轴承202设置在支架轴承隔套203和轮组支架201的内部,支架轴承安装盖204将支架轴承202封闭。进一步地,如图2中所示,支架轴承隔套203套设在输入主轴102上且其一端固定设置在第一行星摆臂组件的壳体上。如图2中所示,轮组支架组件2还可包括支架支撑轴承组件,支架支撑轴承组件可包括支架支撑轴承205和支架支撑轴承隔套206,支架支撑轴承隔套206套设在输入主轴上,支架支撑轴承205设置在支架轴承隔套203与支架支撑轴承隔套206之间。
在本示例性实施例中,如图2中所示第一行星摆臂轮组和第二行星摆臂轮组还可包括摆臂输出轴309、第一摆臂输出轴承306、第二摆臂输出轴承307和摆臂输出轴承端盖308。其中,摆臂输出轴309的一端轴向设置在摆臂输出同步带轮305中,第一车轮组件和第二车轮组件的车轮转轴的另一端通过摆臂输出轴309与第一行星摆臂轮组和第二行星摆臂轮组上的第三安装孔实现转轴连接,所述摆臂输出轴承端盖308将摆臂输出轴309未与车轮转轴连接的一端封闭。
在本示例性实施例中,如图2中所示,所述第一行星摆臂轮组和第二行星摆臂轮组还可包括摆臂车轮支撑轴315和摆臂车轮支撑轴承组件。
其中,摆臂车轮支撑轴315设置在第一安装孔中并与第一车轮组件和第二车轮组件的车轮转轴未与摆臂输出轴309连接的一端固定连接。摆臂车轮支撑轴承组件套设在摆臂车轮支撑轴315上并作用在第一行星摆臂轮组和第二行星摆臂轮组上。例如,摆臂车轮支撑轴承组件可包括第一摆臂车轮支撑轴承310、第二摆臂车轮支撑轴承311和摆臂支撑轴承端盖316,第一摆臂车轮支撑轴承310套设在摆臂车轮支撑轴315上并作用在第一摆臂支架301上,第二摆臂车轮支撑轴承311套设在摆臂车轮支撑轴315上并作用在第二摆臂支架302上。
在本示例性实施例中,如图2中所示,所述车轮转轴可包括行星齿轮箱402和车轮支撑轴承组件。所述行星齿轮箱402轴向设置在车轮401中,车轮支撑轴承组件设置在行星齿轮箱402和车轮401之间。这里,车轮上沿轴向设置有安装行星齿轮箱的安装孔,行星齿轮箱固定设置在所述安装孔中。车轮支撑轴承组件包括车轮支撑轴承403和车轮支撑轴承端盖404。
具体来讲,如图1和2中所示,轮组支架201安装有一对支架轴承202,通过支架轴承安装盖204与支架轴承隔套203实现轴承组轴向定位,摆臂安装支架207安装在支架轴承202内,支架轴承安装盖204通过摆臂安装支架207的外圆进行定位安装,支架支撑轴承205安装在摆臂安装支架207上,支架支撑轴承隔套206起轴向限位作用。
第一摆臂支架301与第二摆臂支架302组合形成了行星摆臂的外壳。摆臂输入同步带轮303,同步带304,摆臂输出同步带轮305形成带传动用来传递动力。行星摆臂组件3的中间部分通过摆臂输入同步带轮303,第一摆臂主轴支撑轴承313,第二摆臂主轴支撑轴承314安装到输入主轴102上。第二摆臂主轴支撑轴承314安装在输入主轴102的两端台阶处,对行星摆臂组件3的安装起到了定位作用。摆臂输出轴309通过第一摆臂输出轴承306,第二摆臂输出轴承307,摆臂输出轴承端盖308,安装到行星摆臂组件3的一端。行星摆臂组件3的另一端装有第一摆臂车轮支撑轴承310、第二摆臂车轮支撑轴承311用于安装车轮组件4,摆臂支撑轴承隔套312起轴向限位作用。
车轮401与摆臂车轮支撑轴315固定安装,行星齿轮箱402输出端与摆臂车轮支撑轴315通过螺钉紧固连接,车轮支撑轴承403安装在摆臂车轮支撑轴315内实现对行星齿轮箱402壳体的支撑,车轮支撑轴承端盖404实现车轮支撑轴承403轴向限位。所形成的整体一端通过行星齿轮箱402输入端,摆臂输出轴309定位安装到行星摆臂组件3上,另一端通过摆臂车轮支撑轴315安装到第一摆臂车轮支撑轴承310与第二摆臂车轮支撑轴承311中,通过摆臂支撑轴承端盖316与摆臂车轮支撑轴315螺钉紧固实现轴向的限位。
行星摆臂组件3,车轮组件4与输入主轴102形成整体,所形成的整体通过螺钉紧固在摆臂安装支架207上,输入主轴102穿过支架支撑轴承205,通过摆臂安装支架207、支架轴承安装盖204、支架支撑轴承205、支架轴承隔套206、第一主轴端盖103和第二主轴端盖104实现整体结构的轴向定位。
其中,输入同步带轮101与输入主轴102通过平键连接,外侧动力源通过输入同步带轮101实现整体动力输入,动力带动输入主轴102运动,通过摆臂输入同步带轮303,同步带304传递到摆臂输出同步带轮305,通过轴承和摆臂输出轴309传递到行星齿轮箱402,通过摆臂车轮支撑轴315和车轮支撑轴承403最终传递到车轮401上。
第一摆臂支架301,第二摆臂支架302可绕输入主轴102自由转动,车轮组件4安装在行星摆臂组件3上,使得车轮401在旋转的过程中还具备绕输入主轴102公转的自由度,从而整体结构具备根据地形调整姿态的能力。
在本发明的第三示例性实施例中,所述移动机器人平台可包括如上第一或第二示例性实施例所述的同步带轮输入式行星摆臂轮组结构。
在本示例性实施例中,所述移动机器人平台可通过电机进行驱动,所述电机与主轴组件连接输入动力使第一车轮组件和第二车轮组件成为主动轮进行同步运动,实现驱动平台的功能,该平台具备轮式移动平台的高移动性能特征,且同步带轮输入式行星摆臂轮组结构能够实现第一车轮组件和第二车轮组件在移动机器人平台自重下自动调整轮组姿态,适应地形。
在本示例性实施例中,所述移动机器人平台可包括在平台主体框架上分布的四组以上的行星摆臂轮组结构,通过多组行星摆臂轮组结构实现对移动机器人平台的整体姿态调整,形成多点接触地形,增强移动机器人平台的越障稳定性。例如,这里,所述移动机器人平台能够越障摆臂轮组结构的车轮0.8直径倍以下的障碍物,能够连续爬坡或越障,能够爬越坡度为50°以下的斜坡。
目前市场上传统的轮式结构、履带式结构以及足式结构移动机器人均存在适应能力有限、履带系统的维护较为复杂且稳定性不高、复杂地形移动效率慢等问题。另外,兼具轮式结构的高移动性能和腿式结构的离散跨越性能组合结构,在跨越楼梯或高台时,需要对分布在车体四个角落的四套支撑腿车轮架等的每个关节进行主动姿态调整,调整参数过多过程过于复杂,同样也限制了其在复杂地形下的移动效率,制约了其普及性的应用。
而本申请的移动机器人平台能够越障摆臂轮0.8直径倍以下的障碍物,同时可以实现连续爬坡或越障,并能够爬越50°以下的斜坡。同时,该平台机器人对检测的场所的地面状况不需要处理通过多组结构的布置,实现对平台整体的姿态调整,且能够形成多点接触地形,增强了移动平台越障稳定性,进一步保护搭载的传感设备,具备更好的运动稳定性。
综上所述,本发明的有益效果包括以下内容中的至少一项:
(1)本发明提供了一种同步带轮输入式行星摆臂轮组结构,采用的同步带轮式输入式行星摆臂轮组结构,其调整能力远大于普通悬挂车轮的作用,能够更好地适应复杂地形,轮式结构相比履带式或足式具备较高的运动效率;
(2)本发明提供了一种移动机器人平台,通过在移动机器人平台的平台主体框架上分布四组以上的同步带轮输入式行星摆臂轮组结构能够进入油气集气站、钻井现场及处理厂等场所的开展巡检任务,对检测的场所的地面状况不需要处理;
(3)该移动机器人平台通过多组结构的布置,能够实现对平台整体的姿态调整,且能够形成多点接触地形,增强移动平台越障稳定性,进一步保护搭载的传感设备,具备更好的运动稳定性;
(4)该移动机器人平台能够越障摆臂轮0.8直径倍以下的障碍物,同时可以实现连续爬坡或越障,并能够爬越50°以下的斜坡。
尽管上面已经结合示例性实施例及附图描述了本发明,但是本领域普通技术人员应该清楚,在不脱离权利要求的精神和范围的情况下,可以对上述实施例进行各种修改。
- 一种行星轮系及同步带传动的车辆轮组装置
- 一种八轮行星摆臂搭载履带式复合移动底盘结构
- 一种便携式轮履双摆臂移动机器人