一种压力波控制的水平井趾端压裂智能滑套
文献发布时间:2023-06-19 19:37:02
技术领域
本发明涉及油田开发技术领域,更具体的说是一种压力波控制的水平井趾端压裂智能滑套。
背景技术
在石油工业领域,尤其是对非常规页岩油气井实施套管分段压裂时,在首段压裂改造开始之前需要对井筒试压,有时甚至需要进行反复试压,确定压裂管柱的憋压情况,在试压结束后需要对管柱施加压力以打开首段套管与地层的连通通道。趾端滑套因为作业方式简单,直接憋压即可开启,施工时效高,成本低、风险小,且不受水平段长度的限制等优点被油田广泛应用。但现有趾端滑套技术开启成功率低,反复试压存在泄露风险,无法满足反复试压的作业需求。
发明内容
本发明提供一种压力波控制的水平井趾端压裂智能滑套,解决了传统趾端滑套无法自由控制阀开启,无法反复试压的问题。
上述目的通过以下技术方案来实现:
一种压力波控制的水平井趾端压裂智能滑套,包括趾端滑套壳体,所述趾端滑套壳体内设有腔体,趾端滑套壳体上设有趾端滑套阀口,阀座位于所述墙体内且安装在所述趾端滑套阀口处,其特征在于,所述腔体内设有压差模块和压力检测模块,趾端滑套壳体上存在间隙,为压差模块与阀座的提供压力,压差模块上设有透压孔,压差模块开启后井下压力能够从所述透压孔处作用在阀座上,使阀座两端形成压差开启或闭合趾端滑套阀口。
所述趾端滑套壳体包括上接头,安装在上接头下部的阀座中心管和过流外套,阀座中心管位于过流外套的内部,阀座安装在中心管与过流外套之间,阀座中心管和过流外套上设有导通的趾端滑套阀口,阀座位于趾端滑套阀口处。
所述趾端滑套壳体还包括安装在过流外套下部的安装座,安装在安装座下部的电腔外壳和电腔中心管,电腔中心管位于电腔外壳的内部,安装在电腔外壳和电腔中心管下部的下接头。
下接头的外壁设有安装槽,对开螺母装入下接头的安装槽内,对开螺母与电腔外壳通过螺纹旋合。
下接头上安装有出线孔堵头。
所述压差模块包括密封堵头、先导阀和动作执行机构,所述透压孔设置在密封堵头上,先导阀左侧密封面和密封堵头右侧密封面相接触,此时开度为0%,控制系统控制动作执行机构向右侧动作,执行动作机构带动先导阀开启,直到先导阀运动停止,此时开度为100%,动作执行机构能够通过压力波控制。
所述压力检测模块包括控制及供电系统和压力传感器,电腔中心管与供电系统之间形成所述形成环腔的一部分,控制及供电系统和压力传感器装入所述环腔的一部分内。
阀座中心管和过流外套上设有多个水嘴,所述多个水嘴排列方式呈圆周均布。
所述水嘴直径为20mm,长度为40mm,数量为8个。
所述水嘴的为腰形。
本发明一种压力波控制的水平井趾端压裂智能滑套的有益效果为:
地面设备可通过发射特定的压力波控制趾端滑套阀开启的特点,能够反复试压。单个水嘴直径为20mm,同时采用8个直径为20mm,长度为40mm的腰型水嘴,实现了大排量排水。
附图说明
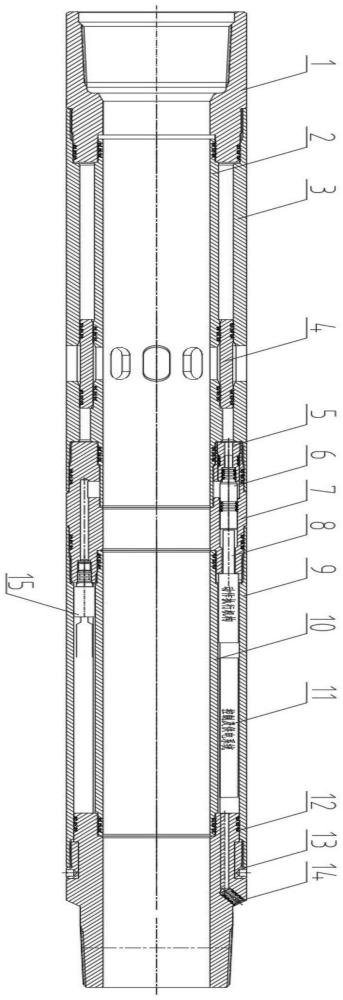
图1为主阀关闭状态的初始状态示意图;
图2为接收到压力波码开阀指令后,先导阀开启结构示意图;
图3为主阀开启状态示意图。
图中:上接头1;阀座中心管2;过流外套3;阀座4;密封堵头5;先导阀6;安装座7;动作执行机构8;电腔外壳9;电腔中心管10;控制及供电系统11;下接头12;对开螺母13;出线孔堵头14;压力传感器15。
具体实施方式
一种压力波控制的水平井趾端压裂智能滑套,如图1所示,包括:上接头1,上接头1下部设有安装孔,阀座中心管2安装在上接头1下部的所述安装孔内,过流外套3与上接头1通过螺纹旋合实现连接,阀座中心管2位于过流外套3的内部,阀座中心管2的右侧设有挡肩,阀座4安装在阀座中心管2的挡肩处,阀座中心管2和过流外套3上设有导通的趾端滑套阀口,阀座4位于趾端滑套阀口处,阀座4位于中心管2和过流外套3之间,安装座7与过流外套3下部旋合组成阀体;还包括压差模块,所述压差模块包括密封堵头5、先导阀6和动作执行机构8,封堵头5、先导阀6和动作执行机构8依次由上至下的安装在安装座7预留的安装孔中,密封堵头5上设有透压孔,电腔外壳9通过螺纹旋合在安装座7的下部,电腔中心管10装入安装座7下部预留的安装孔中,电腔中心管10位于电腔外壳9的内部,电腔中心管10与供电系统11之间形成环腔,压力检测模块装入所述环腔内,所述压力检测模块包括控制及供电系统11和压力传感器15,下接头12的外壁设有安装槽,对开螺母13装入下接头12的安装槽内,对开螺母13与电腔外壳9通过螺纹旋合,以保证预留的设置线不会拧坏,其中,设置线在下井前可将出线孔堵头14拆除,并可通过所述设置线设置控制及供电系统中的控制系统。出线孔堵头14装入下接头12中,各个部分装入氟橡胶密封圈进行密封,通过阀座中心管2与安装座7安装配合的间隙,为压力传感器15与阀座4的提供压力,又可保证固井水泥不会进入。其中,压力传感器15上部与安装座7下部通过螺纹旋合,并利用预留的透压孔检测设备内压力变化并将压力变化转化为电信号传递给控制及供电系统11进行数据分析处理。当压力波信号为特定信号时,控制及供电系统11将控制信号输出给动作执行机构9,使其执行设定动作,同时整个系统由控制及供电系统11提供电能。
图1中,趾端滑套阀口处于关闭状态,先导阀6左侧密封面和密封堵头5右侧密封面相接触,此时开度为0%,控制系统控制动作执行机构8向右侧动作。执行动作机构8带动先导阀6开启,直到先导阀6运动停止,此时开度为100%。
工作原理:在未接收到压力波开启指令前,执行动作机构8连接的先导阀始终处于静止状态,趾端滑套阀体不受井下压力影响,可任意时间、任意次数重复试压。地面设备可通过发射特定的压力波控制动作执行机构8动作。执行动作机构8带动先导阀6开启,先导阀6开启后井下压力可从密封堵头5透压孔作用在阀座4上,使阀座4两端形成压差开启趾端滑套阀体,该方案能够实现反复试压,单个水嘴直径为20mm,同时采用8个直径为20mm,长度为40mm的腰型水嘴,实现了大排量排水。所述单个水嘴在阀座中心管、过流外套排列方式呈圆周均布。
- 一种基于压力波通信的井下多级压裂智能滑套控制系统及方法
- 基于压力波通信的井下多级压裂智能滑套控制系统及方法