电子机械制动装置以及车辆
文献发布时间:2023-06-19 19:38:38
技术领域
本申请实施例涉及电子机械制动技术领域,特别涉及一种电子机械制动装置以及车辆。
背景技术
电子机械制动系统(Electro-Mechanical Braking System,EMB)是一种利用电机驱动机械结构推动摩擦片夹紧制动盘以产生制动的制动系统。其中,保证电子机械制动系统是否对车辆进行制动的因素之一是电机是否正常工作,如果电机没有工作,那么便无法制动车辆。因而电子机械制动系统集成有一套纯机械结构且与车辆的踏板机构连接的备份制动机构,从而在电机无法工作时,电子机械制动系统利用踏板机构输出的踏板制动力制动车辆。然而,在电子机械制动系统利用踏板机构输出的踏板制动力制动车辆时,车辆容易出现漂移、甩尾等失控动作,会降低车辆行驶的安全性。因此,如何保证车辆行驶的安全性成为一个亟待解决的问题。
发明内容
本申请实施例提供一种电子机械制动装置以及车辆,在电机无法工作时电子机械制动装置可以先制动车辆的前轮再制动车辆的后轮,可以避免车辆出现漂移、甩尾等失控动作,进而可以提高车辆行驶的安全性。
本申请第一方面提供一种电子机械制动装置,所述电子机械制动装置用于制动车辆,所述电子机械制动装置包括一个延时装置和两个制动装置,一个所述制动装置用于制动所述车辆的前轮,另一个所述制动装置用于制动所述车辆的后轮,所述电子机械制动装置的运行模式包括主制动模式和副制动模式。所述电子机械制动装置运行于所述主制动模式时,所述两个制动装置分别用于接收制动电机输出的电机制动力。所述电子机械制动装置运行于所述副制动模式时,所述延时装置用于接收所述车辆的踏板机构输出的踏板制动力并先向所述一个制动装置传递制动力、且再向所述另一个制动装置传递制动力。
当本申请实施例的电子机械制动装置无法利用制动电机输出的电机制动力制动车辆的前轮和后轮时,电子机械制动装置会利用踏板机构输出的踏板制动力来制动车辆的前轮和后轮。在利用踏板机构输出的踏板制动力制动前轮和后轮的过程中,延时装置接收到踏板制动力时先向制动前轮的制动装置传递制动力、然后向制动后轮的制动装置传递制动力,实现前轮早于后轮制动。因此,通过让后轮晚于前轮刹车并抱死,可以避免车辆发生甩尾、漂移等失控动作,进而可以提高车辆行驶的安全性。
在一种可能的实施方式中,至少一个所述制动装置包括两个制动器和一个平衡装置,每个所述制动器用于制动一个所述前轮或后轮。所述电子机械制动装置运行于所述主制动模式时,所述两个制动器分别用于接收所述制动电机输出的电机制动力。所述电子机械制动装置运行于所述副制动模式时,所述平衡装置用于接收所述延时装置传递的制动力并分别向所述两个制动器传递相同的制动力。
如此设置,一个制动装置可以用相同的制动力制动两个前轮或两个后轮,可以进一步地提高电子机械制动装置的可靠性,进而可以避免车辆出现漂移、甩尾等失控动作。
在一种可能的实施方式中,所述平衡装置包括杠杆件和壳体件。所述壳体件包括一个输入孔和两个输出孔,所述一个输入孔和所述两个输出孔分别用于连通所述壳体件的外部和内部。所述杠杆件设置于所述壳体件的内部,所述杠杆件用于连接所述延时装置和所述两个制动器,所述延时装置传递的制动力通过所述杠杆件分别向所述两个制动器传递相同的制动力。
如此设置,可以确保杠杆件始终可以分别向两个制动器传递相同的制动力。
在一种可能的实施方式中,所述延时装置包括外壳件和延时件。所述外壳件用于固定所述延时装置并用于容纳所述延时件,所述外壳件包括输入开口和两个输出开口,所述输入开口和所述两个输出开口分别用于连通所述外壳件的内部和外部。所述延时件用于连接所述另一个制动装置和所述踏板机构。在所述一个制动装置先接收到所述延时装置传递的制动力之后,所述踏板机构再通过所述延时件向所述另一个制动装置传递制动力。
如此设置,可以使得延时装置分别与两个制动装置连接,进而一个制动装置先接收到延时装置传递的制动力、另一个制动装置后接收到延时装置传递的制动力,实现后轮晚于前轮刹车。
在一种可能的实施方式中,所述输入开口设置于所述外壳件的一个侧壁,所述两个输出开口设置于所述外壳件的另一个侧壁,所述外壳件的一个侧壁与所述外壳件的另一个侧壁相对设置,所述延时件位于所述外壳件的一个侧壁和所述外壳件的另一个侧壁之间。或者,所述输入开口设置于所述外壳件的一个侧壁,所述两个输出开口分别设置于所述外壳件的另外两个侧壁,所述外壳件的另外两个侧壁相对设置且分别与所述外壳件的一个侧壁相连接,所述延时件位于所述外壳件的另外两个侧壁之间。
在一种可能的实施方式中,所述延时装置包括一根输入钢缆和两根输出钢缆。所述输入钢缆通过所述输入开口使所述踏板机构分别与一根所述输出钢缆和所述延时件连接。所述一根输出钢缆通过一个所述输出开口连接所述踏板机构和所述一个制动装置,所述踏板机构输出的踏板制动力通过所述输入钢缆和所述一根输出钢缆向所述一个制动装置传递制动力。另一根所述输出钢缆通过另一个所述输出开口连接所述延时件和所述另一个制动装置,所述踏板机构输出的踏板制动力通过所述输入钢缆、所述延时件和所述另一根输出钢缆向所述另一个制动装置传递制动力。
如此设置,在实现先向一个制动装置传递制动力、再向另一个制动装置传递制动力的前提下,可以减小延时装置的成本、延时装置与踏板机构和两个制动装置连接的难度。
在一种可能的实施方式中,所述延时装置包括外壳件和延时件,所述外壳件用于固定所述延时装置,所述延时件设置于所述外壳件的内部,所述延时件包括主动件和从动件,其中:所述主动件用于传动连接所述踏板机构和所述从动件,所述从动件用于连接所述另一个制动装置。所述延时装置先向所述一个制动装置传递制动力时所述主动件先沿第一方向朝向所述从动件移动、且再带动所述从动件沿第一方向移动,使得所述延时装置再向所述另一个制动装置传递制动力。
采用如此结构的延时件,在实现后轮晚于前轮刹车的前提下有助于减小延时件的成本、延时装置的体积。
在一种可能的实施方式中,所述主动件还用于传动连接所述踏板机构和所述一个制动装置,所述主动件用于接收所述踏板机构输出的踏板制动力并向所述一个制动装置传递制动力、且先沿第一方向朝向所述从动件移动并再带动所述从动件沿第一方向移动。
在一种可能的实施方式中,所述主动件的轴线和所述从动件的轴线平行于所述第一方向,所述主动件朝向所述从动件的一端与所述从动件朝向所述主动件的一端活动连接,其中:所述主动件用于接收所述踏板机构输出的制动力并先沿第一方向朝向所述从动件移动、且再带动所述从动件沿第一方向移动。或者,所述主动件用于接收所述踏板机构输出的恢复力并先沿第一方向背向所述从动件移动、且再带动所述从动件沿第一方向移动移动,以恢复所述主动件和所述从动件因踏板制动力相对所述外壳件的位移。
如此设置,可以保证延时件重复使用,车辆每次刹车时,都可以确保后轮晚于前轮刹车。
在一种可能的实施方式中,所述主动件朝向所述从动件的一端包括具有连接开口朝向所述从动件的延时腔,所述从动件朝向所述主动件的一端包括延时杆,所述延时杆通过所述连接开口可活动地设置于所述延时腔的内部,所述延时杆的轴线平行于所述第一方向。或者,所述主动件朝向所述从动件的一端包括延时杆,所述延时杆的轴线平行于所述第一方向,所述从动件朝向所述主动件的一端包括具有连接开口朝向所述从动件的延时腔,所述延时杆通过所述连接开口可活动地设置于所述延时腔的内部。
如此设置,一个制动装置可以先接收到制动力、且另一个制动装置可以后接收到制动力,实现后轮晚于前轮刹车。
在一种可能的实施方式中,所述主动件和所述从动件分别与所述外壳件滑动连接,且所述主动件和所述从动件相对于所述外壳件滑动的方向平行于所述第一方向。
如此设置,可以使得主动件和从动件的位置保持不变,有助于确保主动件和从动件始终活动连接。
在一种可能的实施方式中,所述延时装置包括一个输入齿轮件和两个输出齿轮件,所述输入齿轮件和所述两个输出齿轮件分别设置于所述外壳件的内部并分别与所述外壳件转动连接。所述输入齿轮件分别与一个所述输出齿轮件和所述主动件的主动齿条啮合,所述输入齿轮件用于接收所述踏板机构输出的踏板制动力并转动,使得所述一个输出齿轮件转动、所述主动件沿第一方向朝向所述从动件移动。所述一个输出齿轮件用于连接所述一个制动装置,所述踏板机构输出的踏板制动力通过所述输入齿轮件和所述一个输出齿轮件向所述一个制动装置传递制动力。另一个所述输出齿轮件与所述从动件的从动齿条啮合并用于连接所述另一个制动装置。
如此设置,可以实现延时装置分别与踏板机构和两个制动装置连接,从而后轮晚于前轮刹车,进而可以提高车辆行驶的安全性。
在一种可能的实施方式中,沿第一方向所述两个输出齿轮件分别位于所述输入齿轮件的两侧,且所述输入齿轮件和所述两个输出齿轮件位于所述延时件的同侧。或者,沿第一方向所述两个输出齿轮件分别位于所述输入齿轮件的两侧,且所述输入齿轮件和所述两个输出齿轮件分别位于所述延时件的两侧。
如此设置,可以控制延时装置的体积大小,从而可以减小延时装置布置到车辆中的难度。
在一种可能的实施方式中,所述延时装置包括一根输入钢缆和两根输出钢缆。所述输入钢缆的一端用于连接所述踏板机构,所述输入钢缆的另一端用于连接所述输入齿轮件。一根所述输出钢缆的一端用于连接所述一个输出齿轮件,一根所述输出钢缆的另一端用于连接所述一个制动装置。另一根所述输出钢缆的一端用于连接所述另一个输出齿轮件,另一根所述输出钢缆的另一端用于连接所述另一个制动装置。
如此设置,在实现踏板机构与输入齿轮件连接、制动装置与输出齿轮件连接的前提下,可以减小延时装置与踏板机构和制动装置连接的成本。
在一种可能的实施方式中,所述输入齿轮件包括输入轴件和输入齿轮,所述输入轴件的两端分别与所述外壳件转动连接,所述输入齿轮套设在所述输入轴件的外壁上并与所述输入轴件固定连接,其中:所述输入轴件的外壁包括至少两个输入固定座,所述至少两个输入固定座绕所述输入轴件的周向间隔设置,每个所述输入固定座包括输入固定孔,所述输入钢缆的另一端穿过每个所述输入固定座的所述输入固定孔并与每个所述输入固定座固定连接。
采用如此结构的输入齿轮件,可以实现输入齿轮件与输入钢缆连接,从而踏板制动力可以通过输入钢缆带动输入齿轮件转动。
在一种可能的实施方式中,所述输出齿轮件包括输出轴件和输出齿轮,所述输出轴件的两端分别与所述外壳件转动连接,所述输出齿轮套设在所述输出轴件的外壁上并与所述输出轴件固定连接,其中:所述输出轴件的外壁包括至少两个输出固定座,所述至少两个输出固定座绕所述输出轴件的周向间隔设置,每个所述输出固定座包括输出固定孔,所述输出钢缆的另一端穿过每个所述输出固定座的所述输出固定孔并与每个所述输出固定座固定连接。
采用如此结构的输出齿轮件,可以实现输出齿轮件与输出钢缆连接,从而输出齿轮件转动并可以通过输出钢缆将制动力传递至制动装置。
本申请第二方面提供一种车辆,其包括车轮、踏板机构和如第一方面任一项所述的电子机械制动装置。所述电子机械制动装置的延时装置与所述踏板机构连接并用于制动所述车轮。通过具有延时装置的电子机械制动装置对车辆进行制动,可以避免车辆的前轮晚于后轮刹车而导致车辆出现漂移、甩尾等失控动作。
附图说明
图1为本申请实施例提供的一种车辆的结构示意图;
图2为本申请实施例提供的第一种电子机械制动装置的结构示意图;
图3为本申请实施例提供的一种制动装置的结构示意图;
图4为本申请实施例提供的一种平衡装置的剖面图;
图5为本申请实施例提供的一种杠杆件的结构示意图;
图6为图5所示实施例的杠杆件的正视图;
图7为图6中A-A处的剖视图;
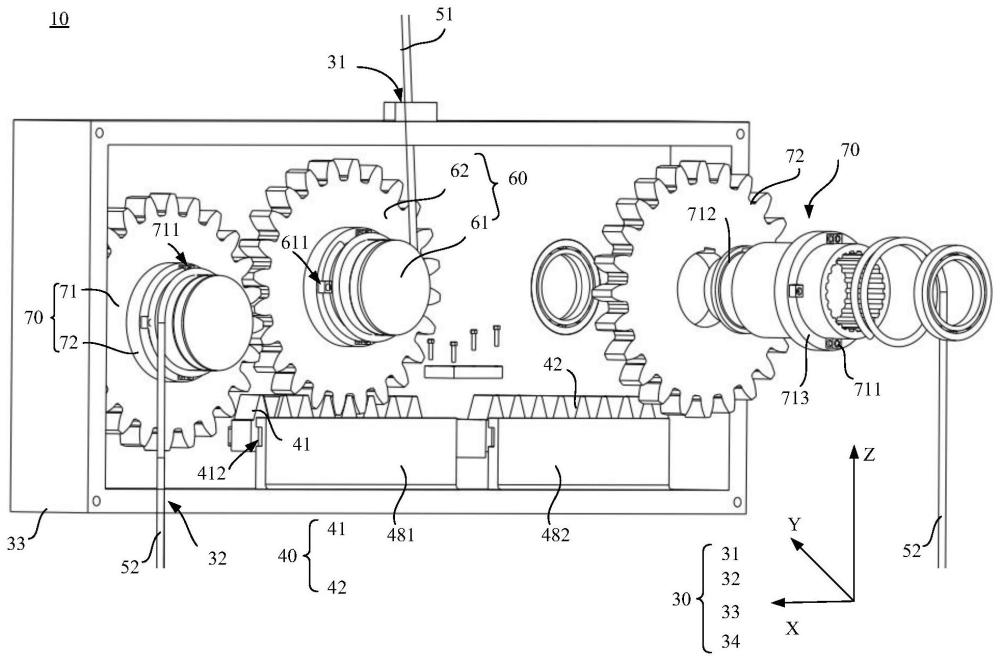
图8为本申请实施例提供的一种延时装置的局部爆炸图;
图9为图8所示实施例的延时装置的局部结构示意图;
图10为本申请实施例提供的第一种延时件的结构示意图;
图11为图10所示实施例的主动件的结构示意图;
图12为图10所示实施例的从动件的结构示意图;
图13为本申请实施例提供的第二种延时件的结构示意图;
图14为本申请实施例提供的第三种延时件的结构示意图;
图15为本申请实施例提供的第四种延时件的结构示意图;
图16为本申请实施例提供的一种输入轴的结构示意图;
图17为本申请实施例提供的一种输入轴肩的结构示意图;
图18为本申请实施例提供的一种输入轴肩的右视图;
图19为本申请实施例提供的一种输入轴肩的正视图;
图20为本申请实施例提供的一种输出轴的结构示意图;
图21为本申请实施例提供的一种输出轴肩的结构示意图;
图22为本申请实施例提供的一种输出轴肩的右视图;
图23为本申请实施例提供的一种输出轴肩的正视图。
附图标记说明:
100、电子机械制动装置;
10、延时装置;
30、外壳件;31、输入开口;32、输出开口;33、底壳;34、盖板;
40、延时件;
41、主动件;411、主动齿条;4111、主动齿部;412、主动滑块;
42、从动件;421、从动齿条;4211、从动齿部;422、从动滑块;
43、延时腔;431、连接开口;
44、延时杆;441、杆体部;442、抵接部;
45、延时座;451、板体部;452、连接部;
46、滑动杆;461、滑杆部;462、限制部;
471、滑动部;472、滑动槽;
481、主动导轨;482、从动导轨;
51、输入钢缆;52、输出钢缆;
60、输入齿轮件;61、输入轴件;611、输入固定座;6111、输入锁紧孔;6112、输入固定孔;612、输入轴;6121、输入花键部;6122、输入轴体部;613、输入轴肩;614、输入过盈部;62、输入齿轮;
70、输出齿轮件;71、输出轴件;711、输出固定座;7111、输出锁紧孔;7112、输出固定孔;712、输出轴;7121、输入花键部;7122、输入轴体部;713、输出轴肩;714、输出过盈部;72、输出齿轮;
20、制动装置;
21、制动器;
22、平衡装置;
23、杠杆件;231、输入连接腔;2311、输入通孔;2312、输入贯通结构;232、输出连接腔;2321、输出通孔;2322、输出贯通结构;
24、壳体件;241、输入孔;242、输出孔;
25、传递钢缆;251、传递钢缆头部;252、传递缆体部;
200、车辆;
210、踏板机构;220、前轮;230、后轮。
具体实施方式
图1为本申请实施例提供的一种车辆的结构示意图。如图1所示,本申请实施例提供的车辆200可以包括车轮、踏板机构210和电子机械制动装置20。电子机械制动装置20与踏板机构210连接,电子机械制动装置20用于制动车轮以实现车辆200制动。可以理解的是,车轮包括前轮220和后轮230。
其中,车辆200可以是两轮车、三轮车、电动车/电动汽车(Electric Vehicle,EV),或者还可以为纯电动汽车(Pure Electric Vehicle/Battery Electric Vehicle,PEV/BEV)、混合动力汽车(Hybrid Electric Vehicle,HEV)、增程式电动汽车(Range ExtendedElectric Vehicle,REEV)、插电式混合动力汽车(Plug-in Hybrid Electric Vehicle,PHEV)、新能源汽车(NewEnergy Vehicle,NEV)等。
在本申请实施例中,电子机械制动装置20可以包括两个制动装置20。其中一个制动装置20用于制动车辆200的前轮220,另一个制动装置20用于制动车辆200的后轮230。电子机械制动装置20的运行模式可以包括主制动模式和副制动模式。电子机械制动装置20运行于主制动模式时,两个制动装置20分别用于接收制动电机输出的电机制动力并分别制动前轮220和后轮230。电子机械制动装置20运行于副制动模式时,两个制动装置20分别用于接收踏板机构210输出的踏板制动力并分别制动前轮220和后轮230。
可以理解的是,主制动模式和副制动模式不同时运行,且电子机械制动装置20主要运行于主制动模式,只有在制动装置20无法接收到制动电机输出的电机制动力时,即制动电机无法正常工作时电子机械制动装置20才运行于副制动模式,换言之,副制动模式相当于电子机械制动装置20的备份制动模式。
在电子机械制动装置20运行于副制动模式时,前轮220和后轮230的刹车顺序会影响车辆200行驶的安全性。其中,当后轮230先刹车,前轮220后刹车,那么会出现后轮230早于前轮220抱死的情况,容易导致车辆200出现漂移、甩尾等失控动作。因此,两个制动装置20对前轮220和后轮230的制动顺序决定着前轮220和后轮230的刹车顺序,进而影响着车辆200行驶的安全性。相对应地,如何保证车辆200行驶的安全性成为一个亟待解决的问题。
有鉴于此,本申请实施例提供一种电子机械制动装置20以及车辆200。
其中,本申请实施例的电子机械制动装置20运行于副制动模式时,可以先对后轮230刹车、且再对前轮220刹车,使得后轮230不早于前轮220抱死,从而可以提高车辆200行驶的安全性,进而可以提高车辆200内的人员的安全性。
下面结合附图,对本申请实施例提供的电子机械制动装置20的结构进行阐述。
图2为本申请实施例提供的第一种电子机械制动装置的结构示意图。参见图2所示,本申请实施例的电子机械制动装置20可以包括一个延时装置10和两个制动装置20。一个制动装置20用于制动车辆200的前轮220,另一个制动装置20用于制动车辆200的后轮230。电子机械制动装置20的运行模式可以包括主制动模式和副制动模式。电子机械制动装置20运行于主制动模式时,两个制动装置20分别用于接收制动电机输出的电机制动力,从而一个制动装置20制动前轮220、且另一个制动装置20制动后轮230。电子机械制动装置20运行于副制动模式时,延时装置10用于接收车辆200的踏板机构210输出的踏板制动力并先向一个制动装置20传递制动力、且再向另一个制动装置20传递制动力,使得一个制动装置20先制动前轮220、且另一个制动装置20后制动后轮230,实现后轮230晚于前轮220刹车并抱死。
可以理解的是,当制动电机无法正常工作,即制动电机无法输出电机制动力时,延时装置10接收踏板机构210输出的踏板制动力并先向制动前轮220的制动装置20传递制动力、然后向制动后轮230的制动装置20传递制动力,实现前轮220早于后轮230制动,可以避免车辆200出现甩尾、漂移等失控动作,进而可以提高车辆200行驶的安全性。
需要说明的是,电子机械制动装置20运行于主制动模式时,两个制动装置20可以同时制动前轮220和后轮230,或者,一个制动装置20先制动前轮220、且另一个制动装置20后制动后轮230。其中,实现先制动前轮220后制动后轮230的方式之一是通过控制两个制动装置20接收电机制动力的顺序。或者,可以通过在制动后轮230的制动装置20内集成一个延时机构,该延时机构可以将使得制动后轮230的制动装置20晚于制动前轮220的制动装置20制动。
参见图1所示,前轮220和后轮230的数量均为两个。因此,在本申请实施例中,一个制动装置20用于制动两个前轮220、且另一个制动装置20用于制动两个后轮230。由此可知,前轮220或后轮230的数量相同。当然,前轮220和后轮230的数量除了为两个外。在一些实施例中,前轮220和后轮230的数量也可以均为一个,从而一个制动装置20用于制动一个前轮220、且另一个制动装置20用于制动一个后轮230。另外,前轮220和后轮230的数量除了相同外,前轮220和后轮230的数量也可以不同。例如在一些实施例中,前轮220可以为一个、且后轮230可以为两个,从而一个制动装置20用于制动一个前轮220、且另一个制动装置20用于制动两个后轮230。
需要说明的是,当前轮220或后轮230的数量为大于二的偶数时,制动前轮220或后轮230的制动装置20的数量可以等于前轮220或后轮230的数量除以二。
在一些可能的实现方式中,用于制动一个前轮220或后轮230的制动装置20可以包括摩擦片(图中未示出)和传动件(图中未示出)。其中,传动件用于使摩擦片分别与延时装置10和制动电机传动连接。电子机械制动装置20运行于主制动模式时,制动电机可以通过传动件带动摩擦片沿前轮220或后轮230的制动盘的轴向朝向制动盘移动,使得摩擦片夹紧制动盘并实现制动。电子机械制动装置20运行于副制动模式时,传动件用于接收延时装置10传递的制动力并带动摩擦片沿前轮220或后轮230的制动盘的轴向朝向制动盘移动,使得摩擦片夹紧制动盘并实现制动。
图3为本申请实施例提供的一种制动装置的结构示意图。在一种可能的实施方式中,参见图3所示,制动装置20可以包括两个制动器21和一个平衡装置22。其中,每个制动器21用于制动一个前轮220或后轮230。电子机械制动装置20运行于主制动模式时,两个制动器21分别用于接收制动电机输出的电机制动力,从而可以制动两个前轮220或两个后轮230。电子机械制动装置20运行于副制动模式时,平衡装置22用于接收延时装置10传递的制动力并分别向两个制动器21传递相同的制动力,从而可以制动两个前轮220或两个后轮230。通过平衡装置22接收延时装置10传递的制动力并分别向两个制动器21传递相同的制动力,可以避免制动两个前轮220或两个后轮230的制动力不同,有助于进一步地避免车辆200出现漂移、甩尾等失控动作,进而可以提高车辆200行驶的安全性。
在本申请实施例中,对于制动器21的具体结构,这里不作限制。例如,在一些可能的实现方式中,制动器21可以包括摩擦片(图中未示出)和钳体件(图中未示出)。钳体件可以包括传动部和固定部。固定部用于与车辆200的车体连接,从而制动器21固定在车辆200上。传动部用于使摩擦片分别与制动电机(图中未示出)和平衡装置22传动连接。电子机械制动装置20运行于主制动模式时,制动电机通过传动部带动摩擦片沿前轮220或后轮230的轴向移动,使得摩擦片可以夹紧前轮220或后轮230的制动盘。电子机械制动装置20运行于副制动模式时,平衡装置22接收延时装置10传递的制动力并通过传动部带动摩擦片沿前轮220或后轮230的轴向移动,使得摩擦片可以夹紧前轮220或后轮230的制动盘。
在本申请实施例中,对平衡装置22的具体结构不作限制。图4为本申请实施例提供的一种平衡装置的剖面图。例如在一些可能的实现方式中,参见图4所示,平衡装置22可以包括杠杆件23和壳体件24。杠杆件23设置于壳体件24的内部,杠杆件23用于使延时装置10分别两个制动器21连接。延时装置10传递的制动力可以通过杠杆件23分别向两个制动器21传递相同的制动力,使得两个制动器21以相同的制动力制动两个前轮220或后轮230。另外,将杠杆件23设置于壳体件24的内部,可以避免壳体件24外部的异物影响杠杆件23的正常工作,确保平衡装置22可以分别向两个制动器21传递相同的制动力。
壳体件24用于与车辆200的车体连接,以将平衡装置22固定连接于车体上。壳体件24可以包括输入孔241和两个输出孔242,输入孔241和两个输出孔242分别用于连通壳体件24的内部和外部。杠杆件23可以通过输入孔241与延时装置10连接,杠杆件23可以通过两个输出孔242分别与两个制动器21连接。延时装置10传递的制动力可以通过杠杆件23分别向两个制动器21传递相同的制动力,使得每个制动器21以相同的制动力制动一个车轮,有助于提高电子机械制动装置20的可靠性。
在本申请实施例中,对于杠杆件23的具体结构不作限制。图5为本申请实施例提供的一种杠杆件的结构示意图,图6为图5所示实施例的杠杆件的正视图,图7为图6中A-A处的剖视图。例如在一些实施例中,参见图4和图5,杠杆件23可以包括一个输入连接腔231和两个输出连接腔232。输入连接腔231用于连接延时装置10,两个输出连接腔232分别用于连接两个制动器21,沿杠杆件23的轴线方向(如图5中的X方向)两个输出连接腔232分别排列于输入连接腔231的两侧,输入连接腔231与一个输出连接腔232之间的距离等于输入连接腔231与另一个输出连接腔232之间的距离。如此设置,可以保证杠杆件23向两个制动器21传递的制动力的大小相同、实现杠杆件23分别与延时装置10和两个制动器21连接。
可以理解的是,通过杠杆原理:F1*L1=F2*L2,可以保证杠杆件23分别向两个制动器21传递的制动力的大小相同。其中,F1和F2为杠杆件23分别向两个制动器21传递的制动力,L1为输入连接腔231与一个输出连接腔232之间的距离,L2为输入连接腔231与另一个输出连接腔232之间的距离。
采用输入连接腔231与延时装置10连接,在满足杠杆原理的前提下,有助于减小杠杆件23与延时装置10的连接难度。同理可得,采用输出连接腔232与制动器21连接,在满足杠杆原理的前提下,有助于减小杠杆件23与制动器21的连接难度。
在本申请实施例中,对于输入连接腔231的具体结构不作限制。例如在一些可能的实现方式中,参见图5-图7所示,输入连接腔231可以包括输入通孔2311,输入通孔2311位于杠杆件23的顶壁并沿垂直于杠杆件23的轴线的方向(如图5中Z方向)贯穿杠杆件23,输入通孔2311的内壁包括输入贯通结构2312,输入贯通结构2312沿垂直于杠杆件23的轴线的方向(如图5中Y方向)贯穿杠杆件23的一个侧壁。其中,第一方向、第二方向和杠杆件23的轴线相互垂直。
在本申请实施例中,对于输入贯通结构2312的具体结构不作具体限制。例如在一些实施例中,如图5所示,输入贯通结构2312可以是具有缺口的环形输入口。其中,对于环形输入口的具体形状,这里不作限制。例如图7所示,环形输入口沿第一方向的纵向截面呈L形。当然,输入贯通结构2312除了为具有缺口的环形输入口外,在一些实施例中,输入贯通结构2312也可以是环形输入孔241。其中,对于环形输入孔241的具体结构,这里不作限制。例如环形输入孔241可以为圆形孔。
在本申请实施例中,对于输出连接腔232的具体结构不作具体限制。在一些可能的实现方式中,参见图5-图7所示,每个输出连接腔232可以包括一个输出通孔2321,输出通孔2321位于杠杆件23的顶壁并沿垂直于杠杆件23的轴线的方向(如图5中Z方向)贯穿杠杆件23,输出通孔2321的轴线平行于输入通孔2311的轴线。每个输出通孔2321的内壁包括输出贯通结构2322,两个输出贯通结构2322分别贯穿杠杆件23的另外两个侧壁。
在本申请实施例中,对于输出贯通结构2322的具体结构作具体限制。例如在一些实施例中,如图5所示,输出贯通结构2322可以是具有缺口的环形输出口。其中,对于环形输出口的具体形状,这里不作限制。例如5图所示,环形输出口的形状呈L形。当然,输出贯通结构2322除了为具有缺口的环形输出口外,在一些实施例中,输出贯通结构2322也可以是环形输出孔。其中,对于环形输出孔的具体结构,这里不作限制。例如环形输出孔可以为圆形孔。
在本申请实施例中,对于杠杆件23与两个制动器21的连接结构不作限制。例如在一些实施例中,继续参见图5所示,平衡装置22还可以包括两根传递钢缆25,每根传递钢缆25的一端通过一个输出孔242与一个输出连接腔232活动连接,每根传递钢缆25的另一端与一个制动器21连接。
其中,对于传递钢缆25的具体结构,这里不作限制。例如在一些实施例中,继续参见图5所示,每根传递钢缆25可以包括传递钢缆头部251和传递缆体部252。传递钢缆头部251呈杆状结构并可活动地设置于输出通孔2321内,传递钢缆头部251的轴线平行于输出通孔2321的轴线。传递缆体部252的一端与传递钢缆头部251的中部固定连接,传递缆体部252的另一端与制动器21连接。传递缆体部252可活动地穿设于输出贯通结构2322。
图8为本申请实施例提供的一种延时装置的局部爆炸图,图9为图8所示实施例的延时装置的局部结构示意图。在一种可能的实施方式中,参见图8和图9所示,本申请实施例的延时装置10可以包括外壳件30和延时件40。外壳件30用于固定延时装置10并用于容纳延时件40。外壳件30包括输入开口31和两个输出开口32,输入开口31和两个输出开口32分别用于连通外壳件30的内部和外部。延时件40用于连接另一个制动装置20和踏板机构210。在一个制动装置20先接收到延时装置10传递的制动力之后,踏板机构210再通过延时件40向另一个制动装置20传递制动力。通过延时件40可以实现后轮230晚于前轮220刹车并抱死,进而可以提高车辆200行驶的安全性。
可以理解的是,外壳件30的内部具有一个腔体,腔体的内壁包括输入开口31和输出开口32。延时件40设置于腔体内,从而可以避免外界的水、灰尘等异物影响延时件40正常工作,进而可以保证后轮230晚于前轮220刹车并抱死。
在本申请实施例中,对于外壳件30的具体结构不作限制。例如在一些实施例中,参见图8所示,外壳件30可以包括底壳33和盖板34。盖板34盖设于底壳33并与底壳33共同限定出用于容纳延时件40的腔体。其中,输入开口31和输出开口32可以设置于底壳33上。
在一些可能的实现方式中,参见图8所示,输入开口31可以设置于外壳件30的一个侧壁,两个输出开口32可以设置于外壳件30的另一个侧壁。外壳件30的一个侧壁与外壳件30的另一个侧壁相对设置,延时件40位于外壳件30的一个侧壁和外壳件30的另一个侧壁之间。如此设置,可以保证延时件40能够与两个制动装置20连接、且可以保证延时件40能够接受到踏板机构210传递的踏板制动力。
当然,输入开口31和输出开口32除了设置于壳体件24的两个相对侧壁外。在一些可能的实现方式中,输入开口31也可以设置于外壳件30的一个侧壁,两个输出开口32也可以分别设置于外壳件30的另外两个侧壁,外壳件30的另外两个侧壁相对设置且分别与外壳件30的一个侧壁相连接,延时件40位于外壳件30的另外两个侧壁之间。如此设置,可以控制连接延时装置10和制动装置20的钢缆的走向,有助于减小延时装置10与两个制动装置20的连接难度。
图10为本申请实施例提供的第一种延时件的结构示意图。在一些可能的实现方式中,如图9和图10所示,本申请实施的延时件40可以包括主动件41和从动件42。其中,主动件41用于传动连接踏板机构210和从动件42,从动件42用于连接另一个制动装置20。延时装置10先向一个制动装置20传递制动力时主动件41先沿第一方向(如图9或图10中X方向)朝向从动件42移动、且再带动从动件42沿第一方向(如图9或图10中X方向)移动,使得延时装置10再向另一个制动装置20传递制动力。采用如此结构的延时件40,在实现后轮230晚于前轮220刹车的前提下有助于减小延时件40的成本、延时装置10的体积。
可以理解的是,在延时装置10向制动前轮220的制动装置20传递制动力的时候主动件41同时向右移动,且主动件41经过一段时间以后主动带动从动件42向右移动,从而主动件41可以接收踏板机构210输出的踏板制动力并通过从动件42向制动后轮230的制动装置20传递制动力,可以保证前轮220早于后轮230刹车。
需要说明的是,延时件40除了用于连接踏板机构210和制动后轮230的制动装置20外。在一些可能的实现方式中,延时件40也可以用于使踏板机构210分别与两个制动装置20连接,即踏板机构210输出的踏板制动力通过延时件40先向制动前轮220的制动装置20传递制动力、且再向制动后轮230的制动装置20传递制动力。由于延时件40可以包括主动件41和从动件42,因此主动件41的第一端与踏板机构210连接,主动件41的第二端与制动前轮220的制动装置20连接,主动件41的第二端与从动件42连接。主动件41用于接收踏板机构210输出的踏板制动力并向一个制动装置20传递制动力、且先沿第一方向朝向从动件42移动并再带动从动件42沿第一方向移动。
在一些可能的实现方式中,主动件41的轴线和从动件42的轴线平行于第一方向(如图10中X方向),主动件41朝向从动件42的一端与从动件42朝向主动件41的一端活动连接。其中,主动件41用于接收踏板机构210输出的制动力并先沿第一方向朝向从动件42移动、且再带动从动件42沿第一方向移动,或者,主动件41用于接收踏板机构210输出的恢复力并先沿第一方向背向从动件42移动、且再带动从动件42移动,以恢复主动件41和从动件42因踏板制动力相对外壳件30的位移。如此设置,可以保证延时件40重复使用,进而在车辆200每次刹车时都可以确保后轮230晚于前轮220刹车。
在本申请实施例中,对于主动件41和从动件42活动连接的具体结构不作限制。图11为图10所示实施例的主动件的结构示意图,图12为图10所示实施例的从动件的结构示意图。例如在一些实施例中,参见图10-图12所示,主动件41朝向从动件42的一端包括具有连接开口431朝向从动件42的延时腔43,从动件42朝向主动件41的一端包括延时杆44,延时杆44通过连接开口431可活动地设置于延时腔43的内部,延时杆44的轴线平行于第一方向。
在主动件41接收到踏板制动力后,参见图9和图10所示,延时杆44先在延时腔43内向右移动一段距离,直至延时杆44与延时腔43的内壁抵接,然后延时杆44推动从动件42沿第一方向移动,实现向制动后轮230的制动装置20传递制动力。
在主动件41接收到恢复力后,参见图9和图10所示,延时杆44先在延时腔43内向左移动一段距离,直至延时杆44与连接开口431处的内壁抵接,然后延时杆44带着从动件42沿第一方向向左移动,主动件41和从动件42可以回到初始位置。
在本申请实施例中,对于延时杆44的具体结构不作限制。参见图10和图11所示,延时杆44可以包括杆体部441和抵接部442。杆体部441穿设于连接开口431内,杆体部441位于延时腔43内的一端与抵接部442固定连接。抵接部442的尺寸大于连接开口431的尺寸,确保抵接部442始终位于延时腔43内。抵接部442用于与延时腔43的内壁抵接,从而延时杆44可以推动从动件42沿第一方向向右移动或带动从动件42向左移动。
可以理解的是,延时杆44和延时腔43的设置位置也可以互换。例如一些实施例中,主动件41朝向从动件42的一端包括延时杆44,延时杆44的轴线平行于第一方向,从动件42朝向主动件41的一端包括具有连接开口431朝向从动件42的延时腔43,延时杆44通过连接开口431可活动地设置于延时腔43的内部。
除了通过延时杆44和延时腔43实现主动件41和从动件42活动连接外。图13为本申请实施例提供的第二种延时件的结构示意图。在一些实施例中,参见图13所示,主动件41朝向从动件42的一端也可以包括延时座45,从动件42朝向主动件41的一端也可以包括两根滑动杆46。延时座45包括板体部451和连接部452。连接部452朝向从动件42的一端与板体部451固定连接。板体部451包括两个绕连接部452的周向间隔设置的滑孔。每根滑动杆46可以包括滑杆部461和限制部462。滑杆部461朝向主动件41的一端与限制部462固定连接,滑杆部461可活动地穿设于滑动内。板体部451位于限制部462和滑杆部461的另一端之间。
在主动件41接收到踏板制动力后,参见图13所示,板体部451向右移动一段距离直至板体部451与从动件42抵接,然后板体部451推动从动件42沿第一方向向右移动,实现向制动后轮230的制动装置20传递制动力。
在主动件41接收到恢复力后,参见图13所示,板体部451向左移动一段距离且直至板体部451与限制部462抵接,然后板体部451带动从动件42沿第一方向向左移动,主动件41和从动件42可以回到初始位置。
可以理解的是,延时座45和滑动杆46的布置位置也可以互换,例如在一些实施例中,延时座45也可以设置于从动件42,滑动杆46也可以设置于主动件41。
图14为本申请实施例提供的第三种延时件的结构示意图。在一些实施例中,参见图14所示,主动件41和从动件42也可以沿延时装置10的高度方向(例如图14中Z方向)间隔设置,主动件41的轴线和从动件42的轴线平行于第一方向(例如图14中X方向),主动件41的一端包括滑动部471,从动件42的一端包括沿第一方向延伸的滑动槽472。滑动部471的部分插设于滑动槽472内。滑动部471与滑动槽472在第一方向上的右侧壁抵接时,主动件41可以带动件42向右移动。滑动部471与滑动槽472在第一方向上的左侧壁抵接时,主动件41可以带动件42向左移动。
图15为本申请实施例提供的第四种延时件的结构示意图。在一些实施例中,主动件41和从动件42也可以不连接,例如图15所示,主动件41和从动件42沿第一方向并排且间隔设置,且主动件41的轴线和从动件42的轴线平行于第一方向。其中,主动件41用于接收踏板机构210输出的制动力并先沿第一方向(例如图15中X方向)朝向从动件42移动、且再推动从动件42沿第一方向移动,或者,主动件41用于接收踏板结构输出的恢复力并沿第一方向背向从动件42移动以恢复主动件41因踏板制动力相对外壳件30的位移。从动件42与外壳件30之间设置有弹性件(图中未示出),弹性件用于恢复从动件42因主动件41相对外壳件30的位移。
可以理解的是,由于主动件41与从动件42在第一方向上有间隙,从而主动件41开始沿第一方向移动时从动件42不会同时移动,如此可以确保从动件42开始移动的时间晚于主动件41。
在一些可能的实现方式中,主动件41和从动件42可以分别与外壳件30滑动连接,且主动件41和从动件42相对于外壳件30滑动的方向平行于第一方向。如此设置,可以使得主动件41和从动件42的位置保持不变,有助于确保主动件41和从动件42始终活动连接
在本申请实施例中,对于主动件41与外壳件30滑动连接的结构不作限制。例如一些实施例中,参见图9和图10所示,主动件41可以包括两个沿垂直于第一方向(例如图10中X方向)的方向(例如图10中Y方向)相对设置的主动滑块412。外壳件30的一个侧壁包括用于供其中一个主动滑块412插入的主动滑槽。外壳件30的内部可以包括主动导轨481,主动导轨481的轴线平行于第一方向,主动导轨481包括用于供另一个主动滑块412插入的主动滑槽。主动件41位于外壳件30的一端侧壁和主动导轨481之间。采用如此结构,有助于提高主动件41与外壳件30滑动连接的稳定性。另外,采用主动导轨481与另一个主动滑块412连接,可以减小主动件41与外壳件30组装的难度。
在本申请实施例中,不对主动滑块412的具体结构作限制,另外,主动滑槽的结构可以根据主动滑块412而定。例如在一些实施例中,继续参见图9和图10所示,主动滑块412呈矩形的板状结构,相对应地,主动滑槽可以是矩形滑槽。
需要说明的是,在一些实施例中,外壳件30也可以去掉主动导轨481,外壳件30的另一个侧壁包括用于供另一个主动滑块412插入的主动滑槽。
在本申请实施例中,对于从动件42与外壳件30滑动连接的结构不作限制。例如一些实施例中,从动件42可以包括两个沿垂直于第一方向(例如图10中X方向)的方向(例如图10中Y方向)相对设置的从动滑块422。外壳件30的一个侧壁包括用于供其中一个从动滑块422插入的从动滑槽。外壳件30的内部包括从动导轨482,从动导轨482的轴线平行于第一方向,从动导轨482包括用于供另一个从动滑块422插入的从动滑槽。从动件42位于外壳件30的一端侧壁和从动导轨482之间。如此设置,有助于提高从动件42与外壳件30滑动连接的稳定性。另外,采用从动导轨482与另一个从动滑块422连接,可以减小从动件42与外壳件30组装的难度。
在本申请实施例中,不对从动滑块422的具体结构做限制,另外,从动滑槽的结构可以根据从动滑块422而定。例如在一些实施例中,继续参见图9和图10所示,从动滑块422呈矩形的板状结构,相对应地,从动滑槽可以是矩形滑槽。
需要说明的是,在一些实施例中,外壳件30也可以去掉从动导轨482,外壳件30的另一个侧壁包括用于供另一个从动滑块422插入的从动滑槽。
在一些可能的实施方式中,继续参见图8和图9所示,本申请实施例的延时装置10还可以包括一个输入齿轮件60和两个输出齿轮件70。其中,输入齿轮件60和两个输出齿轮件70设置于外壳件30的内部并分别与外壳件30转动连接。输入齿轮件60分别与一个输出齿轮件70啮合和主动件41的主动齿条411啮合,输入齿轮件60用于接收踏板机构210输出的踏板制动力并绕自身的轴线转动,使得一个输出齿轮件70转动、主动件41沿第一方向朝向从动件42移动。一个输出齿轮件70用于连接一个制动装置20,踏板机构210输出的踏板制动力通过输入齿轮件60和一个输出齿轮件70向一个制动装置20传递制动力。另一个输出齿轮件70与从动件42的从动齿条421啮合并用于连接另一个制动装置20。如此设置,可以实现延时装置10分别与踏板机构210和两个制动装置20连接,从而后轮230晚于前轮220刹车,进而可以提高车辆200行驶的安全性。
可以理解的是,踏板制动力可以使输入齿轮件60发生自转,输入齿轮件60可以带动与制动前轮220的制动装置20连接的输出齿轮件70发生自转并使得主动件41沿第一方向(例如图8或图9中X方向)朝向从动件42移动。
由于主动件41早于从动件42沿第一方向移动,且主动件41沿第一方向移动的同时与输入齿轮件60啮合的输出齿轮件70发生自转。因此一个输出齿轮件70先自转,且另一个输出齿轮件70后自转,进而延时装置10可以先向制动前轮220的制动装置20传递制动力、且再向制动后轮230的制动装置20传递制动力。
参见图11所示,主动齿条411可以包括多个沿第一方向(例如图11中X方向)并排且间隔设置的主动齿部4111。
参见图12所示从动齿条421可以包括多个沿第一方向(例如图12中X方向)并排且间隔设置的从动齿部4211。
在一种可能的实施方式中,参见图9所示,沿第一方向两个输出齿轮件70可以位于输入齿轮件60的两侧,且输入齿轮件60和两个输出齿轮件70可以位于延时件40的同侧。如此设置,可以减小延时装置10在高度方向上的尺寸,有助于减小延时装置10的体积。
当然,两个输出齿轮件70除了位于延时件40的一侧外,在一些实施例中,沿第一方向两个输出齿轮件70也可以位于输入齿轮件60的两侧,且输入齿轮件60和两个输出齿轮件70也可以位于延时件40的两侧。
在一种可能的实施方式中,继续参见图9所示,本申请实施例的延时装置10还可以包括一根输入钢缆51和两根输出钢缆52。输入钢缆51的一端用于连接踏板机构210,输入钢缆51的另一端用于连接输入齿轮件60。一根输出钢缆52的一端用于连接一个输出齿轮件70,一根输出钢缆52的另一端用于连接一个制动装置20。另一根输出钢缆52的一端用于连接另一个输出齿轮件70,另一根输出钢缆52的另一端用于连接另一个制动装置20。如此设置,在实现输入齿轮件60与踏板机构210连接、输出齿轮件70与制动装置20连接的前提下,可以减小延时装置10与踏板机构210和制动装置20连接的成本。
由于输入钢缆51的作用是传递踏板制动力,输入齿轮件60和输出齿轮件70的作用是与延时件40相互配合,使得踏板制动制动力可以对应两个先后产生的制动力,两根输出钢缆52将先后产生的两个制动力分别先后传递至两个制动装置20。因此,在一些实施例中,当与延时件40配合的结构不再是输入齿轮件60和输出齿轮件70时,也可以通过输入钢缆51传递踏板制动力,通过输出钢缆52传递延时装置10传递至制动装置20的制动力。
当制动装置20制动两个前轮220或后轮230时,参见图4所示,每根输出钢缆52与一个制动装置20的平衡装置22的杠杆件23的输入连接腔231活动连接,从而延时装置10可以通过杠杆件23分别向两个制动器21传递相同的制动力。
当制动装置20制动一个前轮220或后轮230时,每根输出钢缆52与一个制动装置20的传动件连接,从而延时装置10传递的制动力可以通过传动件带动摩擦片移动。
可以理解的是,延时装置10与踏板机构210和制动装置20的连接结构除了采用钢缆连接外,也可以采用其它传递力的连接装置。例如在一些实施例中,连接装置(图中未示出)可以包括多根连杆和多根线缆。多根线缆和多根连杆交替连接,相邻两根连杆之间设置有一根线缆。其中一根线缆的一端与连杆连接,其中一根线缆的另一端与踏板机构210连接。另一根线缆的一端与连杆连接,另一根线缆的另一端与延时装置10连接。
在一些可能的实现方式中,继续参见图9所示,本申请实施例的输入齿轮件60可以包括输入轴件61和输入齿轮62。其中,输入齿轮62套设在输入轴件61的外壁上并与输入轴件61固定连接。输入轴件61的两端分别与外壳件30转动连接。输入轴件61的外壁包括至少两个输入固定座611,至少两个输入固定座611绕输入轴件61的周向间隔设置,每个输入固定座611包括输入固定孔6112(例如图17所示)。输入钢缆51的另一端穿过每个输入固定座611的输入固定孔6112并与每个输入固定座611固定连接。采用如此结构的输入齿轮件60,可以实现输入齿轮件60与输入钢缆51连接,从而踏板制动力可以通过输入钢缆51带动输入齿轮件60转动。
在本申请实施例中,对于输入轴件61的具体结构不作限制。例如在一些实施例中,输入轴件61可以包括输入轴612和中空结构的输入轴肩613。输入轴612的两端分别与外壳件30的两个相对侧壁转动连接。输入齿轮62套设在输入轴612的外壁上并与输入轴612固定连接。输入轴肩613套设在输入轴612的外壁上并与输入轴612固定连接。输入轴肩613的外壁包括至少两个沿输入轴肩613的周向间隔设置的输入固定座611。采用如此结构的输入轴件61,可以减小输入轴件61的制造难度。
在本申请实施例中,对于输入轴612的具体结构不作限制。图16为本申请实施例提供的一种输入轴的结构示意图。例如在一些实施例中,参见图16所示,输入轴612可以包括输入花键部6121和输入轴体部6122。输入花键部6121设置于输入轴体部6122的外壁并与输入轴体部6122固定连接。输入花键部6121用于与输入齿轮62花键连接,使得输入轴612与输入齿轮62固定连接。
在本申请实施例中,对于输入轴肩613与输入轴612固定连接的方式,这里不作具体限制。例如一些实施例中,输入轴肩613可以采用过盈配合的方式与输入轴612连接,且输入轴肩613的两端分别与输入齿轮62和外壳件30的一个侧壁抵接。另外,对于输入轴肩613的具体结构,这里不作限制。图17为本申请实施例提供的一种输入轴肩的结构示意图,图18为本申请实施例提供的一种输入轴肩的右视图,图19为本申请实施例提供的一种输入轴肩的正视图。例如在一些实施例中,参见图17-图19所示,输入轴肩613的内壁可以包括多个沿输入轴肩613的周向间隔设置的输入过盈部614,输入过盈部614与输入轴612的外壁抵接,输入过盈部614的轴线平行于输入轴肩613的轴线。输入过盈部614的径向截面可以是半圆形、半腰形或弧形等形状。
在本申请实施例中,输入固定座611的具体数量可以根据输入钢缆51的直径、输入轴612的直径等而定,这里不作限制。例如图19所示,输入固定座611的数量为四个。
在本申请实施例中,对于固定输入钢缆51和输入固定座611的方式不作限制。例如在一些实施例中,如图17所示,每个输入固定座611的顶壁还可以包括与输入固定孔6112连通的输入锁紧孔6111,输入锁紧孔6111用于供输入螺钉插入。输入螺钉与输入固定座611螺纹连接并与输入钢缆51抵接,使得输入固定座611与输入钢缆51固定连接。
在一种可能的实施方式中,继续参见图9所示,本申请实施例的输出齿轮件70可以包括输出轴件71和输出齿轮72。其中,输出齿轮72套设在输出轴件71的外壁上并与输出轴件71固定连接。输出轴件71的两端分别与外壳件30转动连接。输出轴件71的外壁包括至少两个输出固定座711,至少两个输出固定座711绕输出轴件71的周向间隔设置,每个输出固定座711包括输出固定孔7112(例如图21所示)。输出钢缆52的另一端穿过每个输出固定座711的输出固定孔7112并与每个输出固定座711固定连接。采用如此结构的输出齿轮件70,可以实现输出齿轮件70与输出钢缆52连接,从而输出齿轮件70转动并可以通过输出钢缆52将制动力传递至制动装置20。
在本申请实施例中,对于输出轴件71的具体结构不作限制。例如在一些实施例中,继续参见图9所示,输出轴件71可以包括输出轴712和中空结构的输出轴肩713。输出轴712的两端分别与外壳件30的两个相对侧壁转动连接。输出齿轮72套设在输出轴712的外壁上并与输出轴712固定连接。输出轴肩713套设在输出轴712的外壁上并与输出轴712固定连接。输出轴肩713的外壁包括至少两个沿输出轴肩713的周向间隔设置的输出固定座711。采用如此结构的输出轴件71,可以减小输出轴件71的制造难度。
在本申请实施例中,对于输出轴712的具体结构不作限制。图20为本申请实施例提供的一种输出轴的结构示意图。例如在一些实施例中,参见图10所示,输出轴712可以包括输出花键部7121和输出轴体部7122。输出花键部7121设置于输出轴体部7122的外壁并与输出轴体部7122固定连接。输出花键部7121用于与输出齿轮72花键连接,使得输出轴712与输出齿轮72固定连接。
在本申请实施例中,对于输出轴肩713与输出轴712固定连接的方式,这里不作具体限制。例如一些实施例中,输出轴肩713可以采用过盈配合的方式与输出轴712连接,且输出轴肩713的两端分别与输出齿轮72和外壳件30的一个侧壁抵接。另外,对于输出轴肩713的具体结构,这里不作限制。图21为本申请实施例提供的一种输出轴肩的结构示意图,图22为本申请实施例提供的一种输出轴肩的右视图,图23为本申请实施例提供的一种输出轴肩的正视图。例如在一些实施例中,参见图21-图23所示,输出轴肩713的内壁可以包括多个沿输出轴肩713的周向间隔设置的输出过盈部714,输出过盈部714与输出轴712的外壁抵接,输出过盈部714的轴线平行于输出轴肩713的轴线。输出过盈部714的径向截面可以是半圆形、半腰形或弧形等形状。
在本申请实施例中,输出固定座711的具体数量可以根据输出钢缆52的直径、输出轴712的直径等而定,这里不作限制。例如图21所示,输出固定座711的数量可以为四个。
在本申请实施例中,对于固定输出钢缆52和输出固定座711的方式不作限制。例如在一些实施例中,如图21所示,每个输出固定座711的顶壁还可以包括与输出固定孔7112连通的输出锁紧孔7111,输出锁紧孔7111用于供输出螺钉插入。输出螺钉与输出固定座711螺纹连接并与输出钢缆52抵接,使得输出固定座711与输出钢缆52固定连接。
在本申请实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应作广义理解,例如,可以是固定连接,也可以是通过中间媒介间接相连,可以是两个元件内部的连通或者两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请实施例中的具体含义。
在本申请实施例或者暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请实施例的限制。在本申请实施例的描述中,“多个”的含义是两个或两个以上,除非是另有精确具体地规定。
本申请实施例的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”、“第四”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请实施例的实施例例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
本文中的术语“多个”是指两个或两个以上。本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系;在公式中,字符“/”,表示前后关联对象是一种“相除”的关系。
可以理解的是,在本申请的实施例中涉及的各种数字编号仅为描述方便进行的区分,并不用来限制本申请的实施例的范围。
- 车辆制动性能检测装置、车辆及车辆的控制方法
- 电子机械制动结构、电子机械制动系统及车辆
- 制动机构、机械制动器、电子机械制动系统及车辆