运动机构公差仿真分析方法
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及运动机构设计技术领域,尤其是涉及一种运动机构公差仿真分析方法。
背景技术
机械产品的运动机构种类繁多,机械产品在运动机构与结构共同作用下,达到特定的功能。
目前,机械产品的活动部件的零件多采用数控加工,装配时利用工装定位,结构与机构之间及机构与机构之间采用标准件配合,同时机构采用螺纹,长圆等一系列设计形式进行补偿,现场实施调节。由于机构众多,其功能相互掣肘,调节量不一致,导致生产不稳定,互换难以满足。
发明内容
针对以上现有技术中存在的至少一些问题,本发明提供一种运动机构公差仿真分析方法,该运动机构公差仿真分析方法将运动仿真与容差分析仿真相结合,借助于运动仿真,将被分析考核机构运动到任何需要的待分析位置,借助于容差分析仿真对处于待分析位置的被分析考核机构进行容差仿真分析以得到容差仿真分析结果,从而优化设计。
为了实现上述目的,本发明提供一种运动机构公差仿真分析方法,该运动机构公差仿真分析方法包括:步骤一:在所述容差分析软件中建立容差仿真运动机制;步骤二:在所述容差分析软件中驱动所述容差仿真运动机制,根据运动形式判断建立的所述容差仿真运动机制是否满足设计要求,当不满足所述设计要求时,则校正所述仿真运动机制,直至达到所述设计要求;步骤三:在所述容差分析软件中对满足所述设计要求的所述容差仿真运动机制定义公差;在所述容差分析软件中定义所述容差仿真运动机制中的被分析考核要素;步骤四:再次驱动所述容差仿真运动机制以将所述容差仿真运动机制的被分析考核机构运动到待分析位置;步骤五:所述容差分析软件对处于所述待分析位置的所述容差仿真运动机制进行容差仿真分析,以得到容差仿真分析结果。
在该技术方案中,由于能够在容差分析软件中建立容差仿真运动机制,并能够容差分析软件能够驱动容差仿真运动机制,同时能够在容差分析软件中对容差仿真运动机制定义公差并能够定义容差仿真运动机制中的被分析考核要素,这样,在容差仿真运动机制达到设计要求并定义公差和被分析考核要素后,可以再次驱动容差仿真运动机制以将容差仿真运动机制的被分析考核机构运动到待分析位置,然后容差分析软件则对处于待分析位置的容差仿真运动机制进行容差仿真分析以得到该待分析位置处的容差仿真分析结果。如果要分析该被分析考核机构的其他位置,则将该被分析考核机构运动到其他位置即可。如果需要分析其他的被分析考核机构,则将其他的被分析考核机构运动到其对应的待分析位置进行容差仿真分析即可。因此,该运动机构公差仿真分析方法将运动仿真与容差分析仿真相结合,借助于运动仿真,将被分析考核机构运动到任何需要的待分析位置,借助于容差分析仿真对处于待分析位置的被分析考核机构进行容差仿真分析以得到容差仿真分析结果,从而优化运动机构的设计,提升生成的稳定性,使得同一类型的零部件能够互换。
进一步地,所述运动机构公差仿真分析方法包括在所述步骤一之前的数据转化导入步骤,所述数据转化导入步骤包括将通过制图软件绘制的运动机构模型转化为能够被所述容差分析软件识别的数据格式,并将所述数据格式导入所述容差分析软件;在所述步骤一中,所述容差分析软件基于导入的所述数据格式建立所述容差仿真运动机制。
更进一步地,所述运动机构公差仿真分析方法包括在所述数据转换导入步骤之前的简化步骤,所述简化步骤对所述运动机构模型进行简化处理以得到运动机构简化模型;所述数据转化导入步骤中,将所述运动机构简化模型转化为所述数据格式。
更进一步地,所述简化步骤包括将所述运动机构模型中不参与被分析考核要素分析计算的零件进行布尔融合。
进一步地,所述简化步骤包括将在所述运动机构模型整体运动过程中相对静止的机构进行布尔融合。
进一步地,所述运动机构公差仿真分析方法包括在制图软件中利用所述运动机构简化模型建立简化模型运动机制,其中,对所述简化模型运动机制建立测量因素,并输入驱动参数以进行仿真运动。
进一步地,所述步骤二中,对所述容差仿真运动机制和所述简化模型运动机制建立相同的测量因素,并输入相同的驱动参数以进行仿真运动,在相同的驱动参数和相同的测量因素下对比所述容差分析软件和所述制图软件的测量结果,当两者测量结果保持一致时,则认定所述容差仿真运动机制满足设计要求。
进一步地,所述运动机构公差仿真分析方法包括在所述简化模型运动机制的仿真运动中,输出能够显示整个仿真运动过程中的运动极值的关系。
更进一步地,所述步骤四中,所述待分析位置包括所述运动极值的位置。
另外,所述定义公差包括定义零件公差、定义装配公差和将调节量转换为能够被所述容差分析软件识别的识别公差。
显而易见,在以上单个实施方式中描述的元件或特征可以在其它实施方式中单独或组合使用。
附图说明
在附图中,尺寸和比例不代表实际产品的尺寸和比例。附图仅仅是说明性的,并且为了清楚起见,省略了某些非必要的元件或特征。
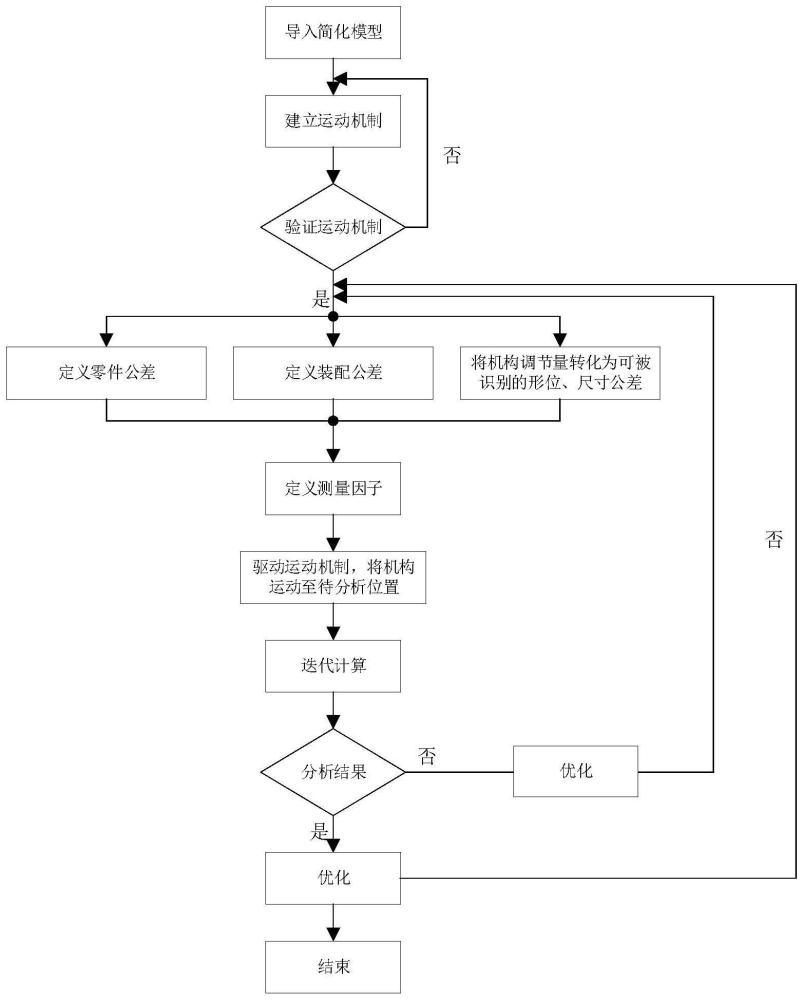
图1是示例性示出根据本发明的一种实施方式的运动机构公差仿真分析方法的示意流程框图;
图2是示例性示出简化步骤的一种示意图;
图3是示例性示出步骤二的一种示意图;
图4是示例性示出能够显示整个仿真运动过程中的一种运动极值的关系的示意图。
具体实施方式
接下来将参照附图详细描述本发明。这里所描述的仅仅是根据本发明的优选实施方式,本领域技术人员可以在所述优选实施方式的基础上想到能够实现本发明的其他方式,所述其他方式同样落入本发明的范围。
参考图1,本发明提供的运动机构公差仿真分析方法包括:步骤一:在容差分析软件中建立容差仿真运动机制,例如图1中的导入简化模型和建立运动机制;步骤二:验证运动机制,在容差分析软件中驱动容差仿真运动机制,根据运动形式判断建立的容差仿真运动机制是否满足设计要求,当不满足设计要求时,则校正仿真运动机制,直至达到设计要求;步骤三:在容差分析软件中对满足设计要求的容差仿真运动机制定义公差;在容差分析软件中定义容差仿真运动机制中的被分析考核要素;步骤四:再次驱动容差仿真运动机制以将容差仿真运动机制的被分析考核机构运动到待分析位置;步骤五:容差分析软件对处于待分析位置的容差仿真运动机制进行容差仿真分析(例如进行蒙特卡洛计算或其他数据的迭代计算),以得到容差仿真分析结果。
在该运动机构公差仿真分析方法中,由于能够在容差分析软件中建立容差仿真运动机制,并能够容差分析软件能够驱动容差仿真运动机制,同时能够在容差分析软件中对容差仿真运动机制定义公差并能够定义容差仿真运动机制中的被分析考核要素,这样,在容差仿真运动机制达到设计要求并定义公差和被分析考核要素后,可以再次驱动容差仿真运动机制以将容差仿真运动机制的被分析考核机构运动到待分析位置,然后容差分析软件则对处于待分析位置的容差仿真运动机制进行容差仿真分析以得到该待分析位置处的容差仿真分析结果。如果要分析该被分析考核机构的其他位置,则将该被分析考核机构运动到其他位置即可。如果需要分析其他的被分析考核机构,则将其他的被分析考核机构运动到其对应的待分析位置进行容差仿真分析即可。因此,该运动机构公差仿真分析方法将运动仿真与容差分析仿真相结合,借助于运动仿真,将被分析考核机构运动到任何需要的待分析位置,借助于容差分析仿真对处于待分析位置的被分析考核机构进行容差仿真分析以得到容差仿真分析结果,从而优化运动机构的设计。
在容差分析软件中建立容差仿真运动机制可以包括在机构与机构之间或者机构与结构之间添加相对应的运动副,比如转动副、滑动副等。
在该运动机构公差仿真分析方法中,可以在容差分析软件中绘制运动机构,也就是,容差分析软件配置为具备图形绘制能力,这样,可以直接在容差分析软件中根据设计需求绘制图形,使得可以直接在容差分析软件中建立容差仿真运动机制。
在其他实施方式中,可以将通过外部制图软件绘制的运动机构模型导入到容差分析软件中,例如,参考图1,运动机构公差仿真分析方法包括在步骤一之前的数据转化导入步骤,数据转化导入步骤包括将通过制图软件绘制的运动机构模型转化为能够被容差分析软件识别的数据格式,并将数据格式导入容差分析软件;这样,在步骤一中,容差分析软件基于导入的数据格式建立容差仿真运动机制。这样,容差分析软件就可以驱动建立的容差仿真运动机制运动即可。
另外,一些实施方式中,可以将制图软件绘制的原始的运动机构模型转化为数据格式并导入到容差分析软件中。或者,在其他实施方式中,参考图1,运动机构公差仿真分析方法包括在数据转换导入步骤之前的简化步骤,简化步骤对运动机构模型进行简化处理以得到运动机构简化模型;数据转化导入步骤中,将运动机构简化模型转化为数据格式。这样,可以将运动机构模型中不参与分析考核的部分简化处理,例如可以与运动的部件一体成型,从而减少数据量和数据转化工作量,提升仿真分析准确性和效率。
当然,在该运动机构公差仿真分析方法中,简化步骤可以包括多种简化类型,例如,一种简化类型中,简化步骤包括将运动机构模型中不参与被分析考核要素分析计算的零件进行布尔融合,例如,可以将这些零件融合为单一部件。
另一种简化类型中,参考图2,简化步骤包括将在运动机构模型整体运动过程中相对静止的机构进行布尔融合,这样,可以将在整个运动过程中相对静止的多个机构视作为单一机构,例如,在图2中,杆类机构的整个运动过程中,机构A和机构B、机构B和机构C之间相对静止,无转动或平动关系,因此可以将机构A、B、C整体作为单一机构,依靠机构A左端部的孔和机构C右端部的孔来参与整个机构的运动。
另外,在该运动机构公差仿真分析方法中,运动机构公差仿真分析方法包括在制图软件中利用运动机构简化模型建立简化模型运动机制,其中,对简化模型运动机制建立测量因素,并输入驱动参数以进行仿真运动,这样,参考图3,可以判断简化模型运动机制的仿真运动是否与制图软件的原始的运动机构的仿真运动一致,从而提升在容差分析软件中建立的容差仿真运动机制准确性。
另外,参考图3,步骤二中,对容差仿真运动机制和简化模型运动机制建立相同的测量因素,并输入相同的驱动参数以进行仿真运动,在相同的驱动参数和相同的测量因素下对比容差分析软件和制图软件的测量结果,当两者测量结果保持一致时,则认定容差仿真运动机制满足设计要求,这样,如图3所示的,当两者测量结果保持一致时,可以确定容差仿真运动机制和原始的运动机构具有相同的仿真运动。
另外,在该运动机构公差仿真分析方法中,运动机构公差仿真分析方法包括在制图软件中利用运动机构简化模型建立简化模型运动机制,其中,对简化模型运动机制建立测量因素,并输入驱动参数以进行仿真运动,而在简化模型运动机制的仿真运动中,输出能够显示整个仿真运动过程中的运动极值的关系。这样,可以确定何种运动参数下能够达到其对应的运动极值,从而优化设计。例如,可以在CAD的仿真运动中输出整个运动过程中,机构与机构之间或者机构与结构之间的间隙、阶差、角度等产生运动极值时之间的关系,参考图4,例如在某一机构在旋转30度时,机构与结构之间将产生最大间隙2mm,因此,该机构在30°的旋转位置需要关注。
另外,步骤四中,待分析位置包括运动极值的位置,也可以包括其他任意需要分析考核的位置。
此外,定义公差包括定义零件公差,如参与运动的零件或者尺寸链传递的零件的外形公差,孔的尺寸、位置公差,轴的尺寸、位置公差等;另外,定位公差包括定义装配公差,如与机构连接的结构装配后相关交点的位置公差,连接孔、轴的紧固件公差等;另外,定位公差包括将调节量转换为能够被容差分析软件识别的识别公差,例如将机构调节量转化为可被容差分析软件识别的尺寸公差,形状公差,位置公差,如调解杆的长度等。例如参考图2,原机构A、B、C中,机构A与机构B采用螺纹连接,机构A沿轴线方向可各伸缩5mm,同理机构C与机构B采用螺纹连接,机构C沿轴线方向可各伸缩5mm,当机构A、B、C进行布尔简化之后,则将原机构A、C的调节量转化为新机构中两孔沿某方向的距离公差±10mm。再例如,某个轴接头筒中,轴接头筒的外侧面上伸出有水平安装板,水平安装板上能形成有条形孔以调节轴接头筒的安装角度,因此,可以将条形孔转化为沿径向和沿弧向的公差。
另外,在容差分析软件中定义容差仿真运动机制中的被分析考核要素(测量因子)可以包括机构与机构以及机构与结构之间的间隙、阶差、角度等。
另外,制图软件可以为CAD软件或其他三维软件比如Solidworks软件、ProE软件等。
另外,在该运动机构公差仿真分析方法中,基于容差仿真分析结果步骤,可以判断各因子比如调节量、孔轴配合、装配的贡献度,敏感度是否与预期吻合;然后,可以基于制造能力等一系列因素,优化建立的分析模型,如优化基准,优化装配顺序,优化公差等;基于对建立的分析模型的优化,可以验证优化结果,并与优化之前数据进行比对。
本发明的保护范围仅由权利要求限定。得益于本发明的教导,本领域技术人员容易认识到可将本发明所公开结构的替代结构作为可行的替代实施方式,并且可将本发明所公开的实施方式进行组合以产生新的实施方式,它们同样落入所附权利要求书的范围内。
- 一种基于mockup的装配公差对臂架末端精度影响的仿真分析方法
- 公差仿真分析方法