一种针对快递柜派件与收件的末端自动执行机构
文献发布时间:2023-06-19 19:38:38
技术领域
本发明所述种快递柜派(放入)件与收(取出)件的末端自动执行机构,主要属于自动化与机器人应用技术领域,应用场景包括但不限于物流服务技术领域——任何需要高效率的从长方体柜体内取出物品,或向该柜体中放置物品,均应属于本发明的应用技术领域。
背景技术
预计在不久的将来,中国的快递业务市场每天会产生10亿个快件配送订单,而这些订单中至少有一半,在其派送与收取过程中会使用到智能快递柜。即快递员先从物流站将快件搬运至校区、社区或园区的智能快递柜旁,手工将快递逐一放入快递柜中,然后,从快递柜中取出客户提前放置的快件,从而完成派件与收件工作。
在[002]所述的派件与取件的过程中,由快递小哥派件与收件是整个物流体系中消耗时间与成本最多,但工作效率最低的环节。虽然,我们可以采用夹爪技术将快件放入快递柜中,但这种技术会给快件施加外力,使货物产生损伤,或出现夹不住、抓不稳的可能。同时该技术伴有对配套的视觉定位识别技术要求较高,应用也不够灵活等缺陷。即使针对特定快递柜存取物品的自动化机构,目前在技术上也没有完美的解决方案。
发明内容
本发明所述种快递柜派(放入)件与收(取出)件的自动执行机构,主要包括公对接座(18)、母对接座(17)、对接轴(或公母座间连杆,41)、盒体(1),收派件容器)、电机(27)、液压机构动力机构、推送机构(24)、皮带(6,铲取机构)。
针对现有技术的不足,本发明价值在于提供一种安装在工业机器人(或机械手、复合机器人或自动化存取机构)末端的机构或装置,实现针对当前主流尺寸及结构的智能快递柜,进行高效、可靠、精确的放置(或派件)与取出(或收件)有关快件(或物品)的作业。
应用本发明所述相关机构或装置,包括但不限于安装于工业机器人(或机械手)末端,或安装于自动化存取机末端。有关机构或装置只需得到智能快递柜网络接口及指令授权,无需主流或传统智能快递柜做任何改造或二次开发,即可在内嵌程序控制下,代替快递小哥完成有关收派件工作。
本发明所述(或[004]、[005]、[006])所述,种快递柜派(放入)件与收(取出)件的自动执行机构配置了与主流智能快递柜尺寸适配的盒体(1),通过公对接座(18)与工业机器人末端锁定,通过对接轴(41)末端的母对接座(17)与盒体连接,形成一套完整的工业机器人末端执行机构,而盒体分为大、中、小三种,放置在特定的位置,根据物品的大小,选择盒体与标准的母对接座进行对接,然后通过电机锁死盒体与母对接座的连接,开始执行放入或取出物品的作业。
本发明所述[007]所述,盒体上部署的液压机构对推送机构(24)及皮带(6)协同完成铲取快件或物体的力量,从特定位置铲取快件或物体,然后通过网络接口打开特定大小的空置智能快递柜的自动柜门,由后端工业机器人(或自动化机构)将快件搬运到特定位置,并对准上述智能快递柜口,然后将盒体插入该快递柜内,继而利用液压推动机构将物品放入快递柜内,最后用盒体末端推动快递柜门关闭。当派件工作完成后,有关机构查询智能快递柜内是否有需要收揽的快件及其所在位置,如果有则首先请求智能快递柜开门,然后利用本机构后端工业机器人及自动化机构将盒体对准该快递柜门口,将盒体插入该快递柜内,继而利用推送机构及皮带产生向前铲、向后拉的力量,将快件取入盒体中,再由后端工业机器人将盒体搬运至特定位置,采用前面的派件程序完成快件收揽的作业。
本发明所述盒体内部配有皮带机构和推送机构,皮带前端设计为铲头。其中,推送机构采用折叠连杆原理设计,配合皮带完成向前推送,或向外放置的作业。而本发明收件机构盒体前铲与皮带摩擦力后拉配合形成合力,能够高效、稳定的完成较重快件的收件与派件的作业。
本发明所述母对接座安装在盒体后端,其拥有1个对接口,并配套电机提供动力实现对接口的打开与锁死。当对接口打开时,可以让链接杆末端插入或拔出,放下或装上特定尺寸的盒体,从而完成自动化工装快换的作业流程。
附图说明
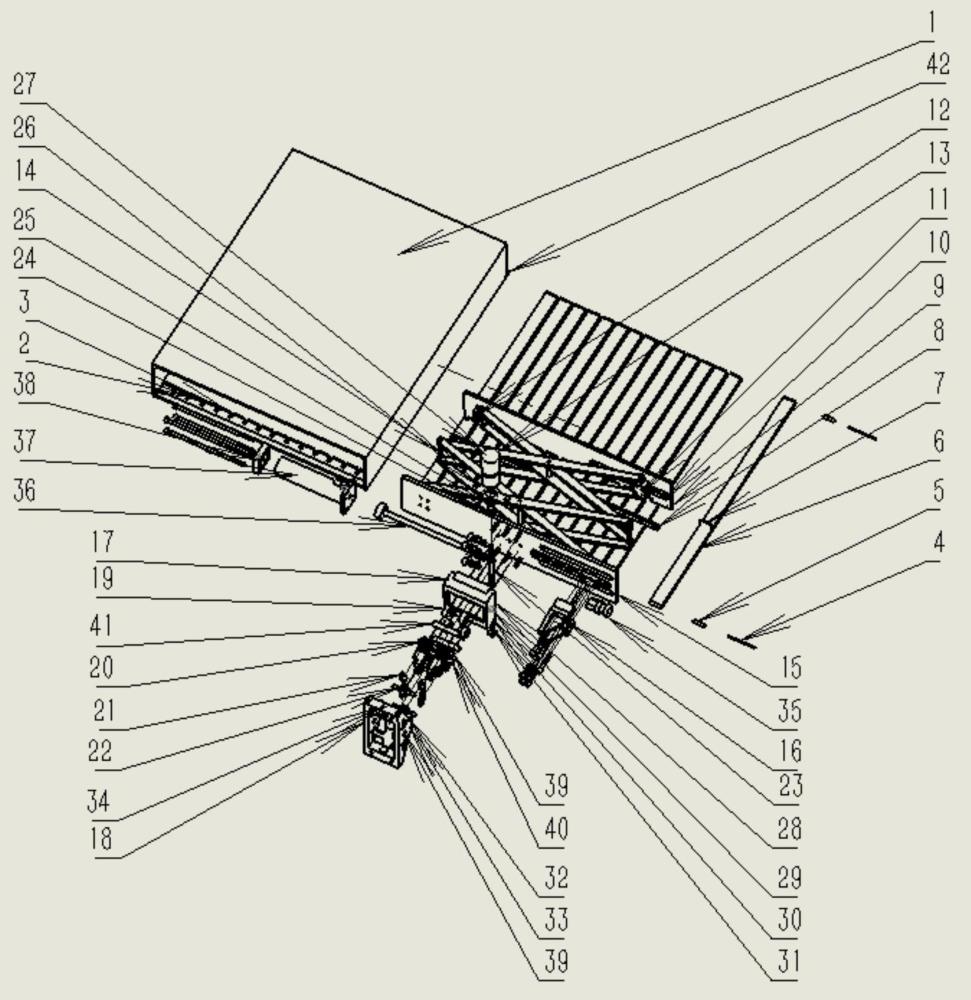
图1:快递柜派件与收件的自动执行机构总体结构图,体现了本发明的各个部分,已经各个部分之间的连接或动力驱动关系。主要包括:1、盒体;2、锯齿口;3、齿口;4、皮带轴;5、皮带轮;6、皮带;7、皮带压紧处;8、同步压紧条;9、推送板;10、上滑轨;11、上滑块;12、上固定座;13、连接杆;14、连接杆;15、固定板;16、滑动卡扣;17、母对接座;18、公对接座;19、对接轴承;20、对接头;21、连杆;22、螺纹滑块;23、正反螺纹杆;24、推力轴承;25、轴销;26、电机固定法兰;27、电机;28、推力轴承;29、预紧顶套;30、预紧螺母;31、预紧螺丝;32、孔a1;33、孔a2;34、孔a3;35、对接卡头;36、液压缸杆;37、液压缸臂;38、液压缸杆;39、轴a1;40、轴缸;41对接轴;
图2:派件与收件盒体及前端铲口造型示意图,展现了本发明前端的基本样式。主要包括:1、盒体;2、锯齿牙;3、齿口;44、皮带轴孔;
图3:派件与收件盒体内部结构与自动化示意图。主要包括:6、皮带;9、推送板;10、上滑轨;11、上滑块;12、上固定那个座;14、链接杆;16、滑动卡扣;17、母对接座;25、轴销;
图4:快递柜派件与收件盒体后端母插座。
图5:公对接座及配套液压、电机等动力机构示意图。包括:18、公对接座;19、对接轴承;20、对接头;21连杆;22、螺纹滑块;23、正反螺纹杆;25、连轴器;26、电机固定法兰;27、电机;28、推力轴承;30、预紧螺母;31、预紧螺丝;35、对接卡头;36、液压缸杆;37、液压缸壁;38、液压缸盖;
具体实施方式
本发明所述种快递柜派(放入)件与收(取出)件的自动执行机构,主要分为二个部分,前部机构包括装配在一起的盒体(内含自动化推送与揽收机构)与母对接座,后部机构包括装配在一起的公对接座、液压动力机构、电机动力机构、动力传动轴与连杆等部件。
根据[016]所述的执行机构,其后部机构所述公对接座左侧装有液压缸,上侧装有电机,前侧安装有对接头,后侧有与工业机器人(或机械手)对应的接口,中间有贯穿的固定轴孔。
根据[016]所述的执行机构,其前部所述的母对接座前侧设有中间凸起,两侧向内部凹陷的对接口,后侧有与盒体相对应的固定接口。
根据[016]所述的执行机构,其前部所述盒体前后齿口内有用于滚动皮带的皮带轮,齿牙上有皮带轴孔用与固定皮带轴,盒体进出口端设有一段下面平整上面有坡度的铲刀口。
根据[016]所述的执行机构,其机构主要分动力源机构和动力传输机构,动力源机构布署在公对接座上,动力传输机构通过母对接座布署在盒体上,动力源的液压动力通过动力传输机构来驱动推送板和皮带同步进出料,动力源机构电机通过电动力组件控制对接头开合。
本发明所述的液压动力由液压缸壁、液压缸盖、液压缸活塞杆等部件构成。而有关动力传输机构主要有滑块、滑轨、连接杆、推送板、皮带等部件构成。
本发明所述的动力传输机构为折叠式连杆通过轴销活动链接,上下端面都为一头链接固定座,另一头链接滑动座,下端面滑动座与滑动卡扣链接,液压缸活塞杆端头的对接卡头与滑动卡扣对接。
本发明所述的电机动力组件由法兰固定电机,通过联轴器与套在推力轴承里面的正反螺纹杆连接,预紧螺丝螺母压紧正反螺纹杆,螺纹滑块穿插在正反螺纹杆上,通过连杆与固定在公对接座里面的对接头连接,对接头上面套有对接轴承。
本发明所述的机构,在内嵌程序控制下,通过液压及电机提供动力,而盒体作为容器。当本机构需要派件时,首先通过后端工业机器人(或机械手,或自动化装置)的适当运动,使盒体对准需要铲取的快件,然后盒体内部机构的协同下铲取快件,然使盒体对准、并插入提前打开的智能快递柜中,然后由内部机构推出快件,盒体同时抽出,从而完成一次派件。当派件工作完成后,有关机构查询智能快递柜内是否有需要收揽的快件及其所在位置,如果有则首先请求智能快递柜开门,然后利用本机构后端工业机器人及自动化机构将盒体对准该快递柜门口,将盒体插入该快递柜内,继而利用推送机构及皮带产生向前铲、向后拉的力量,将快件取入盒体中,再由后端工业机器人将盒体搬运至特定位置,采用前面的派件程序完成快件收揽的作业。
- 一种基于快递柜的快件存取方法及快递柜
- 一种楼栋下快递柜、楼栋下快递柜系统和派收件方法
- 一种家用快递柜、家用快递柜系统和派收件方法