一种驱动电路、驱动系统及驱动方法
文献发布时间:2023-06-19 19:40:14
技术领域
本发明实施例涉及电源管理电路技术领域,特别涉及一种驱动电路、驱动系统及驱动方法。
背景技术
驱动电路中的电平位移电路主要作用是将低压控制信号转换为高压驱动信号,以此来控制外部的功率开关(MOS管)的开启和关断。
传统驱动电路中的高边供电端口连接外部的供电电源,为了保证驱动电路正常工作,供电电源输入的工作电压不能大于驱动电路中所有驱动管的漏源耐压,那么就会使得传统驱动电路无法适用于工作电压更高的电源管理电路。
因此,亟需一种新的驱动电路。
发明内容
为了解决传统驱动电路无法适用于工作电压更高的电源管理电路的问题,本发明实施例提供了一种驱动电路、驱动系统及驱动方法。
第一方面,本发明实施例提供了一种驱动电路,包括:多个依次级联的电平位移模块、钳位模块和驱动模块;所述钳位模块包括多个与所述电平位移模块一一对应的钳位子模块;
每一个所述钳位子模块的输出端分别连接至对应的所述电平位移模块,每一个所述钳位子模块用于为每一个所述电平位移模块提供对应的钳位电压;
每一个下一级的电平位移模块的两个输入端,分别连接至上一级电平位移模块的两个输出端,位于第一级的电平位移模块的两个输入端分别连接第一控制信号和第二控制信号,位于最后一级的电平位移模块的两个输出端分别连接至所述驱动模块的两个输入端,每一个所述电平位移模块用于将当前电平位移模块的输入端接收的控制信号转换为更高电平的控制信号,以将所述第一控制信号和所述第二控制信号,依次经由每一个电平位移模块而转换为电平逐级递增的控制信号;其中,最后一级的电平位移模块的高边端连接外部的供电电源提供的工作电压,每一级电平位移模块的高边端的电压逐级递增;
所述驱动模块的低边端连接至最后一级的钳位子模块,所述驱动模块的输入端的两个输入端分别连接至最后一级的电平位移模块的两个输出端,所述驱动模块的输出端连接至外部的功率开关,所述驱动模块用于根据最后一级的电平位移模块输出的控制信号,输出驱动信号至外部的功率开关。
第二方面,本发明实施例还提供了一种驱动系统,包括:供电电源、功率开关和本说明书任一实施例所述的驱动电路;
所述功率开关的输入端连接至所述驱动电路;所述供电电源分别与所述驱动电路和所述功率开关连接,所述供电电源用于给所述驱动电路和所述功率开关提供工作电压,以使所述驱动电路输出驱动信号至所述功率开关,来控制所述功率开关的工作状态。
第三方面,本发明实施例还提供了一种基于本说明书任一实施例所述的驱动电路的驱动方法,包括:
利用钳位模块中的每一个钳位子模块为对应的电平位移模块提供对应的钳位电压;
基于每一个钳位子模块的钳位电压和外部的供电电源提供的工作电压,利用多级电平位移模块将位于第一级的电平位移模块接收到的第一控制信号和第二控制信号,依次转换为电平逐级递增的控制信号;其中,最后一级的电平位移模块的高边端连接所述工作电压,每一级电平位移模块的高边端的电压逐级递增,且最后一级的电平位移模块之外每一级电平位移模块的高边端的电压均低于所述工作电压;
驱动模块根据最后一级电平位移模块输出的控制信号,输出驱动信号至外部的功率开关,以控制所述功率开关的工作状态。
本发明实施例提供了一种驱动电路、驱动系统及驱动方法,通过利用钳位模块中的每一个钳位子模块为对应的电平位移模块提供对应的钳位电压;然后,基于每一个钳位子模块的钳位电压和外部的供电电源提供的工作电压,利用多级电平位移模块将位于第一级的电平位移模块接收到的第一控制信号和第二控制信号,依次转换为电平逐级递增的控制信号;其中,最后一级的电平位移模块的高边端连接供电电源提供的工作电压,每一级电平位移模块的高边端的电压逐级递增,且最后一级的电平位移模块之外每一级电平位移模块的高边端的电压均低于供电电源提供的工作电压;最后,驱动模块根据最后一级电平位移模块输出的控制信号,输出驱动信号至外部的功率开关,以控制功率开关的工作状态;以此来提高输入的工作电压,进一步使得本方案的驱动电路可以适用于工作电压更高的电源管理电路。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明一实施例提供的传统驱动电路图;
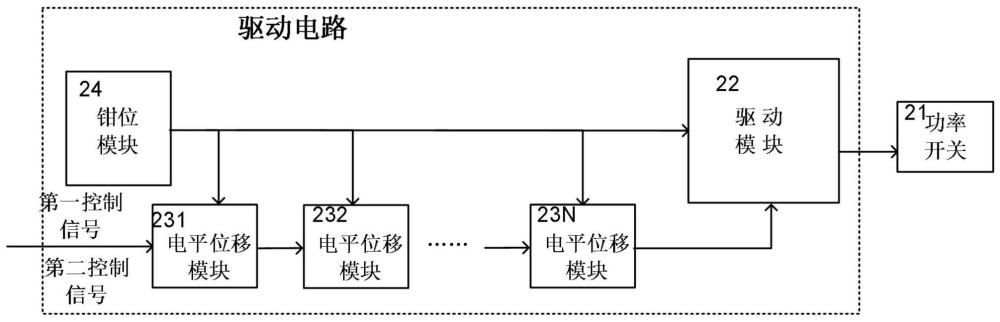
图2是本发明一实施例提供的一种驱动电路结构示意图;
图3是本发明一实施例提供的一种电平位移模块的电路图;
图4是本发明一实施例提供的一种驱动电路图;
图5是本发明一实施例提供的另一种电平位移模块的电路图;
图6是本发明一实施例提供的另一种驱动电路图;
图7是本发明一实施例提供的一种驱动方法的流程图;
其中,11和21、功率开关;12和22、驱动模块;13和231-23N、电平位移模块;14和24、钳位模块;241-24N、钳位子模块。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
如前所述,传统驱动电路中的高边供电端口连接外部的供电电源,为了保证驱动电路正常工作,供电电源输入的工作电压不能大于驱动电路中所有驱动管的漏源耐压,那么就会使得传统驱动电路无法适用于工作电压更高的电源管理电路。
如图1所示,为传统PMOS功率开关的驱动电路图,在工作过程中,MOS管M6、M7、M8、M9、M10、M11、M13、M14的漏源两端之间的电压最高时等于工作电压VIN电压,为了保证驱动电路正常工作,高边端的工作电压VIN不能大于M6、M7、M8、M9、M10、M11、M13、M14的漏源两端之间的可以承受的耐压。因此,传统驱动电路无法适用于工作电压更高的电源管理电路。
为了解决上述技术问题,发明人可以考虑利用将多个电平位移模块依次级联,并为每个电平位移模块配置对应的钳位子模块,将最后一级的电平位移模块连接外部的供电电源提供的工作电压VIN,那么除最后一级的电平位移模块以外,每一级电平位移模块的高边端的电压均会低于工作电压VIN,且程逐级递增,那么既可以保证每一级电平位移模块的MOS管的漏源电压不会高于可以承受的耐压,又可以提高驱动电路适用的工作电压VIN,进一步可以使驱动电路适用于工作电压更高的电源管理电路。
下面描述以上构思的具体实现方式。
请参考图2,本发明实施例提供了一种驱动电路,该电路包括:多个依次级联的电平位移模块、钳位模块24和驱动模块22;所述钳位模块24包括多个与所述电平位移模块一一对应的钳位子模块;
每一个所述钳位子模块的输出端分别连接至对应的所述电平位移模块,每一个所述钳位子模块用于为每一个所述电平位移模块提供对应的钳位电压;
每一个下一级的电平位移模块的两个输入端,分别连接至上一级电平位移模块的两个输出端,位于第一级的电平位移模块的两个输入端分别连接第一控制信号和第二控制信号,位于最后一级的电平位移模块的两个输出端分别连接至所述驱动模块22的两个输入端,每一个所述电平位移模块用于将当前电平位移模块的输入端接收的控制信号转换为更高电平的控制信号,以将所述第一控制信号和所述第二控制信号,依次经由每一个电平位移模块而转换为电平逐级递增的控制信号;其中,最后一级的电平位移模块的高边端连接外部的供电电源提供的工作电压,每一级电平位移模块的高边端的电压逐级递增;
所述驱动模块22的低边端连接至最后一级的钳位子模块,所述驱动模块22的输入端的两个输入端分别连接至最后一级的电平位移模块的两个输出端,所述驱动模块22的输出端连接至外部的功率开关21,所述驱动模块22用于根据最后一级的电平位移模块输出的控制信号,输出驱动信号至外部的功率开关21。
本发明实施例中,通过利用钳位模块24中的每一个钳位子模块为对应的电平位移模块提供对应的钳位电压;然后,基于每一个钳位子模块的钳位电压和外部的供电电源提供的工作电压,利用多级电平位移模块将位于第一级的电平位移模块接收到的第一控制信号和第二控制信号,依次转换为电平逐级递增的控制信号;其中,最后一级的电平位移模块的高边端连接供电电源提供的工作电压,每一级电平位移模块的高边端的电压逐级递增,且最后一级的电平位移模块之外每一级电平位移模块的高边端的电压均低于供电电源提供的工作电压;最后,驱动模块22根据最后一级电平位移模块输出的控制信号,输出驱动信号至外部的功率开关21,以控制功率开关21的工作状态。因此,本方案可以提高输入的工作电压,进一步使得本方案的驱动电路可以适用于工作电压更高的电源管理电路。
下面根据图2所示的驱动电路示意图进行说明。
参考图3,在一些实施方式中,电平位移模块包括上驱动MOS管和下驱动MOS管,上驱动MOS管和下驱动MOS管的种类不同;
当钳位子模块包括用于为上驱动MOS管提供第一钳位电压的第一钳位支路时,电平位移模块中的上驱动MOS管和下驱动MOS管均为高压MOS管。
举例来说,当功率开关为PMOS管时,上驱动管M9和M8均为高压PMOS管,下驱动管M13和M14均为高压NMOS管。需要说明的是,上驱动MOS管和下驱动MOS管的种类不同,是指上驱动MOS管均为PMOS管时,则下驱动管为NMOS管,上驱动MOS管均为NMOS管时,则下驱动管为PMOS管,具体根据电路的设计而定。
在一些实施方式中,当功率开关为PMOS管时,电平位移模块中的上驱动MOS管为高压PMOS管,下驱动MOS管为高压NMOS管;
电平位移模块包括:PMOS管M4、NMOS管M5、上驱动管M8、上驱动管M9、下驱动管M13和下驱动管M14;
PMOS管M4,栅极连接至NMOS管M5的漏极和上驱动管M9的源极连接线上,源极连接至电平位移模块的高边端,漏极连接至NMOS管M5的栅极和上驱动管M8的源极连接线上;
NMOS管M5的源极连接至电平位移模块的高边端;
上驱动管M8,栅极连接对应钳位子模块的第一钳位电压,漏极连接下驱动管M13的漏极,源极作为电平位移模块的第一输出端;
上驱动管M9,栅极连接对应钳位子模块的第一钳位电压,漏极连接下驱动管M14的漏极,源极作为电平位移模块的第二输出端;
下驱动管M13,栅极为电平位移模块的第一输入端,源极连接电平位移模块的低边端;
下驱动管M14,栅极为电平位移模块的第二输入端,源极连接电平位移模块的低边端。
在本实施例中,由于上驱动管和下驱动管的种类不同,PMOS管和NMOS管所需的钳位电压不同。当钳位子模块仅包括用于为上驱动MOS管提供第一钳位电压的第一钳位支路时,电平位移模块中的上驱动管和下驱动管的漏源电压均有超出耐压的风险,因此电平位移模块中的上驱动管和下驱动管均为高压MOS管。
举例来说,本实施例中的功率开关为PMOS管,那么电平位移模块中的上驱动MOS管为高压PMOS管,下驱动MOS管为高压NMOS管。
在一些实施方式中,第一钳位支路,包括:稳压管D1和电阻R1;
稳压管D1,阴极连接电平位移模块的高边端,阳极连接电阻R1的一端,阳极作为第一钳位支路的输出端,用于输出第一钳位电压;
电阻R1,另一端连接电平位移模块的低边端。
在本发明实施例中,驱动模块22,可以包括:PMOS管M2、PMOS管M3、NMOS管M6和NMOS管M7;
PMOS管M2,栅极连接NMOS管M6的栅极,漏极连接NMOS管M6的漏极,源极连接最后一级的电平位移模块的高边端,PMOS管M2的栅极作为驱动模块的一个输入端,连接至最后一级的电平位移模块的第二输出端,PMOS管M2的漏极作为驱动模块的一个输出端,连接至功率开关;
PMOS管M3,栅极连接NMOS管M7的栅极,漏极连接NMOS管M7的漏极,源极连接最后一级的电平位移模块的高边端,PMOS管M3的栅极作为驱动模块的另一个输入端,连接至最后一级的电平位移模块的第一输出端,PMOS管M3的漏极作为驱动模块的另一个输出端,连接至功率开关;
NMOS管M6的源极连接最后一级的钳位子模块的第一钳位电压,;
NMOS管M7的源极连接最后一级的钳位子模块的第一钳位电压。
在本发明实施例中,如图4所示,为两个图3所示的电平位移模块级联时的驱动电路图。
可见,第一级的高边端连接第二级钳位子模块242,第一级的钳位子模块241的输出端作为第二级电平位移模块232的低边端。第一级的电平位移模块231的第一输入端连接第一控制信号IN-,第二输入端连接第二控制信号IN+,通过电平位移模块231将第一控制信号IN-和第二控制信号IN+通过电平位移为高电平的控制信号,分别通过电平位移模块231的第一输出端和第二输出端,连接至第二级的电平位移模块232的第二输入端和第一输入端;第二级的电平位移模块232通过电平位移转换为更高电平的控制信号,然后通过电平位移模块232的第二输出端和第一输出端传输至驱动模块22中,驱动模块22根据第二级的电平位移模块232输出的控制信号,输出驱动信号至外部的功率开关21,来控制功率开关21的开启和关断。其中,电平位移模块232的高边端连接外部的供电电源提供的工作电压VIN,那么电平位移模块231的高边端的电压均会低于工作电压VIN,既可以保证电平位移模块231和电平位移模块232的MOS管的漏源电压不会高于可以承受的耐压,又可以提高驱动电路适用的工作电压VIN,进一步可以使驱动电路适用于工作电压更高的电源管理电路。
然而,图3和图4所示的驱动电路中电平位移模块231的上驱动管和下驱动管均为高压MOS管,通常在工艺实现时,高压MOS管相比于低压MOS管需要增加额外的掩膜版和生产工序,提高了生产成本;另外,高压MOS管的所占用的芯片面积和寄生电容一般比较大,从而增加了电平位移模块的延迟时间,降低了驱动电路的速度。
因此,在一些实施方式中,参考图5和图6,当钳位子模块包括用于为上驱动MOS管提供第一钳位电压的第一钳位支路和用于为下驱动MOS管提供第二钳位电压的第二钳位支路时,电平位移模块中的上驱动MOS管和下驱动MOS管均为低压MOS管。
具体地,当功率开关为PMOS管时,电平位移模块中的上驱动MOS管为低压PMOS管,下驱动MOS管为低压NMOS管;
电平位移模块包括:PMOS管M4、NMOS管M5、上驱动管M8、上驱动管M9、下驱动管M11、下驱动管M12、下驱动管M13和下驱动管M14;
PMOS管M4,栅极连接至NMOS管M5的漏极和上驱动管M9的源极连接线上,源极连接至电平位移模块的高边端,漏极连接至NMOS管M5的栅极和上驱动管M8的源极连接线上;
NMOS管M5的源极连接至电平位移模块的高边端;
上驱动管M8,栅极连接对应钳位子模块的第一钳位电压,漏极连接下驱动管M11的漏极,源极作为电平位移模块的第一输出端;
上驱动管M9,栅极连接对应钳位子模块的第一钳位电压,漏极连接下驱动管M12的漏极,源极作为电平位移模块的第二输出端;
下驱动管M11,栅极连接对应钳位子模块的第二钳位电压,源极连接下驱动管M13的漏极,下驱动管M11用于根据第二钳位电压控制下驱动管M13的栅源电压;
下驱动管M12,栅极连接对应钳位子模块的第二钳位电压,源极连接下驱动管M14的漏极,下驱动管M12用于根据第二钳位电压控制下驱动管M14的栅源电压;
下驱动管M13,栅极为电平位移模块的第一输入端,源极连接电平位移模块的低边端;
下驱动管M14,栅极为电平位移模块的第二输入端,源极连接电平位移模块的低边端。
在一些实施方式中,第一钳位支路,可以包括:稳压管D1和电阻R1;
稳压管D1,阴极连接电平位移模块的高边端,阳极连接电阻R1的一端,阳极作为第一钳位支路的输出端,用于输出第一钳位电压;
电阻R1,另一端连接电平位移模块的低边端;
第二钳位支路,可以包括:电阻R2和稳压管D2;
电阻R2,一端连接电平位移模块的高边端,另一端连接稳压管D2的阴极;
稳压管D2,阳极连接电平位移模块的低边端,阳极作为第二钳位支路的输出端,用于输出第二钳位电压。
在本实施例中,如图5所示,第一钳位支路用于电平位移模块的上驱动管M8和M9提供第一钳位电压,以确保M8和M9的栅源电压不超过稳压管D1的第一钳位电压;第二钳位支路用于为电平位移模块的下驱动管M11、M12、M13和M14提供第二钳位电压,以确保M11、M12、M13和M14的栅源电压不超过稳压管D2的第二钳位电压。下驱动管M11和M12分别用于根据第一钳位电压和第二钳位电压控制下驱动管M13和M14的栅源电压。
如图5所示的驱动电路,具体工作过程分以下两种情况:
第一控制信号IN-为低电平VLO、第二控制信号IN+为高电平(VLO+5V)时:MOS管M14导通,M12导通,M9关断,M4导通,M13关断,M11关断,M8导通,M5关断;MOS管M3关断,M7导通,M2导通,M6关断。OUT+为高电平(VHI)、OUT-为低电平(VHI-5V)。
第一控制信号IN-为高电平(VLO+5V)、第二控制信号IN+为低电平VLO时:MOS管M14关断,M12关断,M9导通,M4关断,M13导通,M11导通,M8关断,M5导通;MOS管M3导通,M7关断,M2关断,M6导通。OUT+为低电平(VHI-5V)、OUT-为高电平。
通过互补的第一控制信号IN-和第二控制信号IN+的高低电平交替,可以控制功率开关21的开启和关断。
另外,第二控制信号IN+的最高电压不超过MOS管M14的栅源击穿电压Vgs14(max),第一控制信号IN-的最高电压不超过MOS管M13的栅源击穿电压为Vgs13(max));为描述方便,假设所有MOS管的开启电压均为Vth,所有稳压源的钳位电压VD为5V。
那么,在工作过程中,所有的NMOS管,其栅源电压的最大值Vgsn(max)=max(VD-Vth、第二控制信号IN+、第一控制信号IN-);所有的NMOS管,其漏源电压的最大值Vdsn(max)=max(VD,VHI-VD+Vth)。
所有的PMOS管,其栅源电压的最大值Vgsp(max)=VD-Vth;所有的PMOS管,其漏源电压的最大值Vdsp(max)=max(VD,VHI-VD+Vth-VLO)。
假如设定稳压源的钳位电压VD≤5V、VHI-VD+Vth≤5V、VHI-VD+Vth-VLO≤5V,则图5所示电平位移模块中所有的MOS管均可使用5V的低压MOS管。
由以上公式可知,VHI-VLO≤5V+VD-Vth≤2*5V-Vth,因此,使用图5所示电平位移模块,在仅使用5V低压MOS管的条件下,最高可实现从0~5V到5V-VTH~2*5V-Vth的电平位移。
因此,图5所示的电平位移模块在使用5V低压MOS管的条件下,最高可实现从0~5V到5V-VTH~2*5V-Vth的电平位移,相较于图1所示的电平位移模块提高了控制信号的电平位移能力,进一步可以提高驱动电路的驱动能力。
在本发明实施例中,如图6所示,为两个图5所示的电平位移模块级联时的驱动电路图。
可见,第一级的高边端分别连接第二级钳位子模块242的第一钳位支路和第二钳位支路,第一级的钳位子模块241的第一钳位支路的输出端作为第二级电平位移模块232的低边端。第一级的电平位移模块231的第一输入端连接第一控制信号IN-,第二输入端连接第二控制信号IN+,通过电平位移模块231将第一控制信号IN-和第二控制信号IN+通过电平位移为高电平的控制信号,分别通过电平位移模块231的第一输出端和第二输出端,连接至第二级的电平位移模块232的第二输入端和第一输入端;第二级的电平位移模块232通过电平位移转换为更高电平的控制信号,然后通过电平位移模块232的第二输出端和第一输出端传输至驱动模块22中,驱动模块22根据第二级的电平位移模块232输出的控制信号,输出驱动信号至外部的功率开关21,来控制功率开关21的开启和关断。其中,第二级钳位子模块242的第二钳位支路的输出端连接至驱动模块22的低边端。因此,图6所示的驱动电路通过电平位移模块的级联,在仅使用5V低压MOS管的条件下,最高可实现从0~5V到5V*2-2*VTH~5V*(2+1)-2*Vth的电平位移。不仅提高了驱动能力和工作电压VIN,还可以避免使用高压MOS管,从而减少了加工层次、降低了生产成本,减小了电平位移模块和驱动模块的延迟时间,提高了驱动电路的速度。
需要说明的是,电平位移模块可以为多个,不仅仅局限于2个,具体可以根据功率开关21的工作电压来定。因此,本实施例通过一种电平位移模块的级联方式,在仅使用5V低压MOS管的条件下,最高可实现从0~5V到5N-N*VTH~5(N+1)-N*Vth)的电平位移。不仅可以适用于不同工作电压VIN的功率开关21,还可以提高驱动电路的电平位移能力和驱动能力,另外,避免使用高压MOS管,从而减少了加工层次、降低了生产成本,减小了电平位移模块和驱动模块的延迟时间、提高了驱动电路的速度。
本实施例还提供了一种驱动系统,包括:供电电源、功率开关和如说明书中任一实施例所述的驱动电路;
功率开关的输入端连接至驱动电路;供电电源分别与驱动电路和功率开关连接,供电电源用于给驱动电路和功率开关提供工作电压,以使驱动电路输出驱动信号至功率开关,来控制功率开关的工作状态。
如图7所示,本实施例还提供了一种基于说明书中任一实施例所述的驱动电路的驱动方法,包括:
步骤700,利用钳位模块中的每一个钳位子模块为对应的电平位移模块提供对应的钳位电压;
步骤702,基于每一个钳位子模块的钳位电压和外部的供电电源提供的工作电压,利用多级电平位移模块将位于第一级的电平位移模块接收到的第一控制信号和第二控制信号,依次转换为电平逐级递增的控制信号;其中,最后一级的电平位移模块的高边端连接工作电压,每一级电平位移模块的高边端的电压逐级递增,且最后一级的电平位移模块之外每一级电平位移模块的高边端的电压均低于工作电压;
步骤704,驱动模块根据最后一级电平位移模块输出的控制信号,输出驱动信号至外部的功率开关,以控制功率开关的工作状态。
由于本发明方法实施例与本发明驱动电路的实施例基于同一构思,具体内容可参见本发明驱动电路的实施例中的叙述,此处不再赘述。
需要说明的是,在本文中,诸如第一和第二之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个...”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同因素。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种像素驱动电路、显示装置及像素驱动电路的驱动方法
- 一种像素驱动电路的驱动方法及显示驱动电路、显示装置
- 一种高速隔离驱动电路、电磁铁驱动电路系统
- 源极驱动增强电路、源极驱动增强方法、源极驱动电路和显示设备
- 栅极驱动电路、栅极驱动电路的控制方法和栅极驱动器
- 隔离式自供电源极驱动电路和驱动方法、电源变换系统及用于隔离式驱动系统的驱动电路
- 控制驱动器电路的方法、驱动器电路、包括驱动器电路的系统和制造集成电路的方法