机械密封装置、流体机械设备和机械密封方法
文献发布时间:2023-06-23 06:30:03
技术领域
本申请涉及机械密封技术领域,特别涉及一种机械密封装置、流体机械设备和机械密封方法。
背景技术
在如压缩机、汽轮机、离心泵反应釜等流体机械设备中,具有贯穿流体机械设备的腔体内外的轴,轴与腔体之间存在一个圆周间隙,腔体内外的介质会通过该圆周间隙向两侧泄漏。机械密封装置用于连接在轴与腔体之间,机械密封结构包括套设在轴的上的动环和静环,动环和静环相对旋转以构成密封面,通过密封面将腔体保持在密封状态。但是动环与静环的硬度不同会影响机械密封装置的适用场景,而每个机械密封装置中动环与静环的硬度一经确定后续难以改变,当流体机械设备的腔体内流体状态发生变化时,如从液态变为气液混合状态或者从液态变为固液混合状态等,动环与静环的硬度难以同时适应腔体内的不同流体状态,导致机械密封装置损坏而影响密封效果。
发明内容
本申请提供一种机械密封装置,通过滑动环的设置,动环可与不同硬度的滑动环和静环形成不同的密封面,以实现机械密封装置在不同情境下均能适用的目的。
第一方面,本申请提供一种机械密封装置,所述机械密封装置包括静环、滑动环、动环和驱动结构,所述静环包括第一端面;所述滑动环包括第二端面,所述滑动环沿所述静环的径向设在所述静环的内部或套设在所述静环的外部,所述滑动环和所述静环沿所述静环的周向固定且能够沿所述静环的轴向相对移动,所述静环和所述滑动环的硬度不同;所述动环沿所述轴向设置于所述静环和所述滑动环的一端,所述动环沿所述轴向弹性抵接至所述第一端面或所述第二端面;所述驱动结构用于驱动所述第二端面沿所述轴向朝向所述动环移动,以使所述第二端面与所述动环形成密封面,所述第一端面和所述动环之间形成间隙,所述驱动结构对所述第二端面的朝向所述动环的驱动力解除时,所述第一端面和所述动环之间抵接形成密封面。
其中,所述静环、所述滑动环、所述动环的轴向方向为第一方向,所述静环在第一方向上靠近所述动环的一端面为第一端面,所述滑动环在第一方向上靠近所述动环的一端面为第二端面。在一实施方式中,所述静环在第一方向上固定,所述滑动环可沿第一方向滑动,以使所述滑动环和所述静环沿第一方向相对滑动。
其中,弹性抵接是指所述动环对所述第一端面或所述第二端面具有弹力,使得所述动环与所述第一端面或所述第二端面之间相互抵接。在一实施方式中,所述机械密封装置还包括弹性件,弹性件沿第一方向与所述动环同轴设置,且位于所述动环远离所述静环的一端,通过所述弹性件的设置,实现所述动环沿轴向弹性抵接至所述第一端面或所述第二端面。在一实施方式中,所述弹性件为弹簧。在一实施方式中,所述弹性件为弹片或弹性体。
在一实施方式中,所述机械密封装置还包括动环支撑架,所述动环支撑架套与所述动环同轴设置,所述弹性件、所述动环支撑架和所述动环沿第一方向设置,所述动环支撑架与所述动环固定连接或抵接,且所述动环支撑架与所述弹性件固定连接或抵接,所述动环支撑架与所述弹性件配合,以使所述动环与所述第一端面或所述第二端面的贴合更加紧密。其中所述动环支撑架的具体形状可根据所述动环和所述弹性件的结构和尺寸来设置。在一实施方式中,所述弹性件可直接与所述动环固定连接或者抵接。
通过所述滑动环的设置,所述动环可与不同硬度的所述滑动环和所述静环形成不同的密封面,不同的密封面适用在不同的流体环境中,使所述机械密封装置可适应不同的流体环境,扩大所述机械密封装置的使用范围,增强所述机械密封装置的密封效果,延长所述机械密封装置的使用寿命。
在一种可能的实现方式中,所述静环和所述滑动环中的一个的硬度为第一硬度,所述静环和所述滑动环中的另一个的硬度为第二硬度,所述第一硬度小于所述第二硬度,所述动环的硬度大于或者等于所述第一硬度。在一实施方式中,所述动环的硬度小于所述第一硬度。
在一种可能的实现方式中,所述静环的硬度为所述第一硬度,所述滑动环的硬度为所述第二硬度。在一实施方式中,所述动环的硬度大于所述静环的硬度。在一实施方式中,所述动环的硬度还大于所述滑动环的硬度。在一实施方式中,所述动环的硬度可小于所述滑动环的硬度且大于所述静环的硬度。在一实施方式中,所述动环的硬度可小于所述滑动环的硬度,且小于所述静环的硬度。在一实施方式中,静环310的材质为石墨,滑动环320的材质为碳化硅,石墨的硬度小于碳化硅的硬度。
当流体为液体时,流体状态包括第一状态、第二状态和第三状态,第一状态为流体中的气体含量大于或者等于第一预设值,且流体中的固体含量小于第二预设值;第二状态为流体中的固体含量大于或者等于第二预设值,且所述流体中的气体含量小于第一预设值;第三状态为流体中的气体含量小于第一预设值,且流体中的固体含量小于第二预设值。其中第一预设值和第二预设值可根据所述滑动环、所述静环、所述动环的硬度或者尺寸等来设置,还可根据实际需要来设置。
在所述滑动环的硬度大于所述静环的硬度的情况下,流体处于所述第二状态时,所述驱动结构驱动所述滑动环朝向所述动环运动,使所述滑动环与所述动环贴紧形成所述第二密封面,且所述动环与所述静环的所述第一端面形成间隙,由于所述滑动环的硬度大于所述静环的硬度,构成所述第二密封面的材质的硬度均较大,所述机械密封装置不易被固体磨损,可提所述高机械密封装置的使用寿命。
流体处于所述第一状态时,所述驱动结构对所述滑动环朝向所述动环方向的驱动力解除,在所述弹性件的作用下,所述动环沿第一方向抵接至所述静环并与所述静环紧密贴合形成所述第一密封面,所述滑动环上无额外的朝向所述动环方向的驱动力使所述第二端面与所述动环贴紧,由于所述静环的硬度小于所述滑动环的硬度,所述机械密封装置不易产生大量的热量而烧坏,所述机械密封装置的使用寿命因此提高。
当流体处于所述第三状态时,所述动环与所述静环形成的所述第一密封面或所述动环与所述滑动环形成的所述第二密封面均可达到机械密封效果。
在一种可能的实现方式中,所述静环的硬度为所述第二硬度,所述滑动环的硬度为所述第一硬度。在一实施方式中,所述滑动环的材质为石墨,所述静环的材质为碳化硅,石墨的硬度小于碳化硅的硬度。
在一实施方式中,所述滑动环、所述静环、所述动环的材质选自酚醛塑料、尼龙、聚四氟乙烯、浸树脂石墨、橡胶、陶瓷、堆焊硬质合金、碳化钨合金、锡青铜、钢结硬质合金、不锈钢、石墨、碳化硅。可根据流体或者实际需要调整所述滑动环、所述静环、所述动环的硬度差值。例如,在一实施方式中,第二硬度和第一硬度为莫氏硬度标准,第二硬度的等级比第一硬度的等级至少大1个等级。在一实施方式中,第二硬度和第一硬度为莫氏硬度标准,第二硬度的等级比第一硬度的等级大2个等级。在一实施方式中,第二硬度和第一硬度采用洛氏硬度A标尺(HRA),第二硬度为80HRA-90HRA,第一硬度为55HRA-70HRA。在一实施方式中,第二硬度和第一硬度采用洛氏硬度A标尺(HRA),第二硬度的取值比第一硬度的取值至少大10HRA。在一实施方式中,第二硬度和第一硬度采用洛氏硬度A标尺(HRA),第二硬度的取值比第一硬度的取值大20HRA。
在一实施方式中,所述机械密封装置包括多个硬度不同的所述滑动环,所述驱动结构可分别驱动所述滑动环朝向所述动环运动,使每个所述滑动环均可与所述动环贴紧形成密封面。在一实施方式中,所述驱动结构同时驱动至少两个所述滑动环朝向所述动环运动,使至少两个所述滑动环同时与所述动环贴紧形成密封面。多个所述滑动环的设置,可进一步扩大所述机械密封装置的适用场景和使用范围。
在一种可能的实现方式中,所述驱动结构与所述滑动环远离所述动环的一端抵接或者固定连接。在一实施方式中,所述驱动结构与所述滑动环抵接,所述驱动结构对所述滑动环朝向所述动环的驱动力解除的方式包括将所述驱动结构朝向远离所述动环的方向移动,当所述驱动结构对所述滑动环朝向所述动环的驱动力解除时,所述弹性件对所述动环的弹力推动所述滑动环向远离所述动环的方向移动,直至所述动环与所述静环抵接,所述动环不能继续沿第一方向运动,所述驱动结构继续向远离所述动环的方向移动,直至所述动环与所述滑动环不能紧密贴合,此时所述动环相对所述静环旋转且与所述第一端面弹性抵接,所述静环的所述第一端面与所述动环形成密封面,记为第一密封面。其中,所述驱动结构解除,所述动环与所述静环抵接时,所述驱动结构继续沿着第一方向背离所述动环运动,使所述驱动结构朝向所述滑动环的端面与所述动环朝向所述滑动环的端面之间的距离大于所述滑动环在第一方向上的长度,所述滑动环可位于所述驱动结构和所述滑动环之间的任意位置,此时即使所述滑动环的第二端面与所述动环接触,由于所述滑动环上并无额外的朝向所述动环的作用力,所述第二端面与所述动环之间不能紧密贴合形成有效的密封面,此时,所述机械密封装置通过所述第一密封面实现密封。
在一实施方式中,所述驱动结构与所述滑动环固定连接,当所述驱动结构对所述滑动环朝向所述动环的驱动力解除时,所述驱动结构沿第一方向远离所述动环运动,所述驱动结构带动所述滑动环向远离所述动环的方向运动,所述动环与所述第二端面形成间隙,可以使所述机械密封装置面对环境变化的响应速度更快,更好地适应流体的环境变化。
在一种可能的实现方式中,在所述驱动结构对所述第二端面的朝向所述动环的驱动力解除时,所述第一端面和所述第二端面平齐。若所述第一端面和所述第二端面不平齐,使得工艺设计复杂,且在所述驱动结构驱动所述第二端面运动时需要多运动一段距离才可与所述动环抵接,或所述弹性件使所述动环与所述第一端面抵接时所述动环需多运动一段距离,增加所述机械密封装置的损耗。而所述第一端面和所述第二端面平齐,一方面该设计可降低工艺加工难度,且增加所述机械密封装置的工作效率、减少工作损耗;另一方面,所述动环靠近所述静环和所述滑动环的端面为一平面,使所述动环与所述第一端面或所述第二端面贴合精度高。
在一种可能的实现方式中,所述静环套设在所述滑动环的外周侧。所述滑动环需要在第一方向上远离或靠近所述动环运动,将所述滑动环位于所述静环内侧,所述滑动环的尺寸可设置的相对较小,进而使得所述滑动环与所述静环之间的摩擦力较小,从而可使得所述驱动结构能够较容易的推动所述滑动环在第一方向上滑动。
在一种可能的实现方式中,所述静环套设在所述滑动环的外周侧,所述机械密封装置还包括静环支撑架,所述静环支撑架用于在所述静环的外周面固定所述静环。
在一种可能的实现方式中,所述静环支撑架包括相互连接的周面支撑部和位于所述周面支撑部一端的端面支撑部,所述周面支撑部用于在所述静环的外周侧固定所述静环,所述端面支撑部覆盖所述静环远离所述动环的端面,露出所述滑动环远离所述动环的至少部分端面,所述驱动结构位于所述端面支撑部的内周侧,且与所述滑动环远离所述动环的端面抵接或者固定连接,以驱动所述滑动环沿轴向朝向所述动环移动。
在一实施方式中,所述滑动环远离所述动环的端面全部未被所述端面支撑部覆盖,所述驱动结构与所述滑动环远离所述动环的端面抵接或者固定连接。在一实施方式中,所述滑动环远离所述动环的部分端面被所述端面支撑部覆盖,露出所述滑动环远离所述动环的部分端面,所述驱动结构的结构与露出的所述滑动环端面相抵接或者固定连接。
在一实施方式中,所述端面支撑部设有贯穿所述端面支撑部的通孔,露出至少部分所述滑动环远离所述动环的端面,所述驱动结构穿过所述通孔,并与所述滑动环远离所述动环的端面抵接或者固定连接。其中,所述静环的外周侧和远离所述动环的端面均被所述静环支撑架覆盖,使所述静环在径向和轴向方向均被固定,增强所述静环的稳固性。所述滑动环远离所述动环的部分端面被所述端面支撑部覆盖,所述滑动环远离所述动环的部分端面与所述端面支撑部之间具有间隙,使所述滑动环限位在所述动环和所述端面支撑部之间,防止所述滑动环沿第一方向所述脱离机械密封装置,使所述机械密封装置的密封效果降低,且达不到多场景适用的目的。在一实施方式中,可设置多个所述通孔,使所述驱动结构有足够的驱动力驱动所述滑动环运动。
在一种可能的实现方式中,所述端面支撑部的内表面与所述驱动结构的外表面螺纹连接。所述端面支撑部与所述驱动结构接触的表面设有螺纹,所述驱动结构与所述端面支撑部接触的表面也设有相匹配的所述螺纹,所述端面支撑部中的螺纹与所述驱动结构的螺纹相互配合,使所述驱动结构通过旋转实现在第一方向上运动,所述端面支撑部与所述驱动结构螺纹连接使所述驱动结构的运动具有精密度更高的可控性,提升所述机械密封装置的密封效果。
在一种可能的实现方式中,所述滑动环套设在所述静环的外周侧。
在一种可能的实现方式中,所述机械密封装置还包括静环支撑架,所述静环支撑架包括相互连接的周面支撑部和位于所述周面支撑部一端的端面支撑部,所述周面支撑部位于所述滑动环的外周侧,所述端面支撑部用于在所述静环远离所述动环的端面固定所述静环,所述端面支撑部设有贯穿所述端面支撑部的通孔,露出至少部分所述滑动环远离所述动环的端面,所述驱动结构穿过所述通孔,并与所述滑动环远离所述动环的端面抵接或者固定连接,以驱动所述滑动环沿轴向朝向所述动环移动。
在一实施方式中,所述静环与所述端面支撑部固定连接,所述滑动环与所述周面支撑部位可相对滑动。在一实施方式中,所述端面支撑部设有多个所述通孔,所述驱动结构穿过多个所述通孔与所述滑动环抵接或固定连接,使所述驱动结构有足够的驱动力驱动所述滑动环运动。在一实施方式中,所述驱动结构与所述通孔接触的外表面设有螺纹,所述通孔与所述驱动结构接触的内表面设有螺纹,所述驱动结构与所述通孔螺纹连接,使所述驱动结构的运动具有精密度更高的可控性。所述滑动环限位在所述周面支撑部和所述静环之间,且所述滑动环限位在所述端面支撑部和所述动环之间,使所述机械密封装置的整体稳固性提高,可以更好发挥密封效果。
在一种可能的实现方式中,所述静环和所述滑动环之间设有第一密封圈。所述第一密封圈将所述静环和所述滑动环之间的缝隙密封,防止流体从所述静环和所述滑动环之间的缝隙泄露,所述第一密封圈可增强所述机械密封装置的密封性能。其中所述第一密封圈为具有弹力的密封圈,可为橡胶圈。
在一实施方式中,所述滑动环套设在所述静环的外周侧,所述滑动环与所述静环支撑架之间设有第二密封圈,所述第二密封圈将所述滑动环与所述静环支撑架之间的缝隙密封,防止流体从所述滑动环与所述静环支撑架之间的缝隙泄露,所述第二密封圈可增强所述机械密封装置的密封性能。
在一实施方式中,所述静环套设在所述滑动环的外周侧,所述静环与所述静环支撑架之间设有所述第二密封圈,所述第二密封圈将所述静环与所述静环支撑架之间的缝隙密封,防止流体从所述静环与所述静环支撑架之间的缝隙泄露,所述第二密封圈可增强所述机械密封装置的密封性能。
在一种可能的实现方式中,所述驱动结构包括驱动电机和滑动环调节杆,所述滑动环调节杆位于所述滑动环远离所述动环的一端,所述驱动电机用于驱动所述滑动环调节杆沿轴向移动,带动所述滑动环沿轴向朝向所述动环移动。
在一实施方式中,所述滑动环调节杆的延伸方向为第一方向,所述滑动环调节杆的延伸方向与所述滑动环的轴向方向一致,所述滑动环调节杆的驱动力直接作用于所述滑动环上,可更好驱动所述滑动环运动。在一实施方式中,所述滑动环调节杆的延伸方向与所述滑动环的轴向方向成夹角设置,可减小所述机械密封装置在第一方向上的尺寸。
在一实施方式中,所述滑动环调节杆的延伸方向与所述滑动环的轴向方向成夹角设置,其中夹角的取值大于0°,且小于或者等于90°,所述滑动环套设在所述静环的外周侧,所述周面支撑部设有所述槽道,所述滑动环调节杆通过所述槽道与所述滑动环的抵接或固定连接,所述滑动环限位在所述端面支撑部和所述动环之间,并且所述端面支撑部和所述动环之间留有空隙使所述滑动环可在所述端面支撑部和所述动环之间运动,所述滑动环调节杆在所述槽道内可驱动所述滑动环沿第一方向或背离第一方向运动。
在一实施方式中,所述滑动环调节杆的延伸方向与所述滑动环的轴向方向成夹角设置,其中夹角的取值大于0°,且小于或者等于90°,所述静环套设在所述滑动环的外周侧,所述周面支撑部和所述静环设有所述槽道,所述滑动环调节杆通过所述槽道与所述滑动环的周侧抵接、卡接或固定连接,所述端面支撑部和所述动环将所述滑动环限位在所述端面支撑部和所述动环之间并预留空隙使所述滑动环可在所述端面支撑部和所述动环之间运动,所述滑动环调节杆在所述槽道内可驱动所述滑动环沿第一方向或背离第一方向运动,其中所述槽道沿第一方向的尺寸大于所述滑动环调节杆沿第一方向的尺寸,使得所述滑动环调节杆可在所述槽道内沿第一方向移动。
在一种可能的实现方式中,所述滑动环调节杆呈中空结构且与所述滑动环同轴设置,所述滑动环调节杆的内径大于或等于所述滑动环的内径,所述滑动环调节杆的外径小于或等于所述滑动环的外径。
在一实施方式中,所述静环套设在所述滑动环的外周侧,所述滑动环调节杆与所述滑动环远离所述动环的端面抵接或固定连接,所述滑动环调节杆的外径小于或等于所述滑动环的外径,使所述滑动环调节杆在驱动所述滑动环运动过程中,减少所述滑动环调节杆与所述静环的摩擦,提高所述驱动电机的效率,减少能源损耗。
在一实施方式中,所述滑动环调节杆的外径等于所述滑动环的外径,且所述滑动环调节杆的内径等于所述滑动环的内径,所述滑动环远离所述动环的端面被所述滑动环调节杆覆盖,所述滑动环沿第一方向的两端被限位在所述动环与所述滑动环调节杆之间,所述滑动环调节杆与所述滑动环的接触面积大,或者说所述滑动环调节杆与所述滑动环之间的作用力面积大,更有利于驱动所述滑动环的运动。
在一实施方式中,所述滑动环调节杆为圆柱结构,所述滑动环调节杆与所述滑动环远离所述动环的部分端面抵接或固定连接,所述滑动环调节杆与第一方向平行,所述滑动环调节杆的直径小于或等于所述滑动环的外径与内径之差,以使所述滑动环调节杆在驱动所述滑动环运动过程中,不易遭受所述静环的阻碍而难以继续运动,为了所述滑动环调节杆可以更有效驱动所述滑动环运动,可设置多根所述滑动环调节杆。
在一实施方式中,所述滑动环调节杆与所述滑动环周侧抵接、卡接或固定连接,所述滑动环调节杆的直径可按照实际需要设置,以提供更有效的驱动力。
在一种可能的实现方式中,所述机械密封装置还包括检测装置和控制器,所述检测装置用于检测流体状态,所述控制器根据所述流体状态控制所述驱动结构驱动所述滑动环的第二端面沿轴向朝向所述动环移动或者解除对所述第二端面的朝向所述动环的驱动力。
在一实施方式中,所述检测装置为折射仪,通过检测流体的折射率,以区分流体的状态为所述第一状态、所述第二状态或所述第三状态,该检测的流体的状态信息反馈至所述控制器,所述控制器对信息识别后控制所述驱动结构的运动。在一实施方式中,所述检测装置为密度分析仪,通过检测流体的密度,以区分流体的状态为第一状态、第二状态或第三状态。在其他实施方式中,所述检测装置还可以为红外检测装置、传感器等,只要能够实现检测出液体的所述第一状态、所述第二状态或所述第三状态即可。
第二方面,本申请提供一种流体机械设备,所述流体机械设备包括流体腔、轴和如上任意一项所述的机械密封装置,所述流体腔用于收容流体,所述轴安装在所述流体腔内且延伸至所述流体腔外,所述动环、所述静环和所述滑动环套设在所述轴上,所述动环位于所述流体腔内,所述机械密封装置通过所述密封面实现所述流体腔内和所述流体腔外的密封。
所述流体机械设备还包括壳体,所述流体腔位于所述壳体的内部空间,所述轴安装在所述流体腔内且穿过所述壳体延伸至所述流体腔外,在一实施方式中,所述轴的其中一端穿过所述壳体延伸至壳体外,所述轴的另一端位于所述流体腔内。在一实施方式中,所述轴的两端均穿过所述壳体延伸至壳体外,此时所述轴与所述壳体有两个交界处,在两个所述轴与所述壳体的交界处均设置所述机械密封装置。
其中,所述机械密封装置位于所述轴与所述壳体的交界处,用于隔绝所述流体腔内部和外部环境。所述壳体的截面可以为圆形、椭圆形、多边形等,所述壳体具体的形状根据实际使用场景设置。
采用所述机械密封装置对所述流体机械设备的所述流体腔内和所述流体腔外之间实现密封,一方面,所述机械密封装置可防止所述流体腔内的流体通过所述轴与所述壳体的交界处泄露至所述流体腔外,导致流体的流失和损坏外部器件;另一方面,所述机械密封装置可防止所述壳体外的空气、液体通过进入所述流体腔内,污染所述流体腔内的流体或者损坏所述流体腔内设备;再一方面,所述流体机械设备在使用时,所述流体腔内的流体状态会不同,例如流体中会包含固体杂质或者气泡,所述机械密封装置可根据流体状态的不同来使用滑动环与动环形成的密封面或者使用静环和动环形成的密封面实现所述流体腔内和所述流体腔外之间的密封,以延长所述机械密封装置的使用寿命。
在一实施方式中,所述动环、所述静环和所述滑动环套设在所述轴上,所述动环位于所述流体腔内,所述动环固定在所述轴上且可随着所述轴旋转,所述静环和所述滑动环则不会随着所述轴旋转,当所述轴旋转时,所述轴旋转带动所述动环旋转,所述动环相对所述静环和所述滑动环旋转。
在一实施方式中,所述弹性件、所述动环支撑架套设在所述轴上。在一实施方式中,所述滑动环调节杆设置在所述轴的外周侧,或所述滑动环调节杆套设在所述轴上。
在一种可能的实现方式中,所述流体机械设备还包括叶轮和电机,所述叶轮位于所述流体腔内且与所述轴固定连接,所述电机位于所述流体腔外且与所述轴连接,所述电机用于驱动所述轴旋转,所述轴旋转带动所述叶轮旋转。
在一种可能的实现方式中,所述流体机械设备为泵、离心机、反应釜或压缩机。
当所述机械密封装置应用在所述泵上时,所述流体腔内的流体为水,通过所述叶轮旋转带动水进入和离开所述流体腔。其中所述流体腔包括所述入口和所述出口,水从所述入口沿第一方向进入所述流体腔,并从所述出口沿第二方向传输至所述流体腔外,第二方向与第一方向垂直,其中,所述静环套设在所述滑动环的外周侧,且所述静环与所述壳体的内表面固定连接。
在一实施方式中,所述流体机械设备为所述泵,所述检测装置位于所述泵的入口一侧,用于检测从所述入口处进入所述流体腔中的流体状态。在一实施方式中,所述检测装置位于所述泵的所述出口一侧,用于检测从所述出口处流出所述流体腔中的流体状态。
所述泵通过所述滑动环的设置,使所述机械密封装置可形成不同的密封面以适应不同水的状态,防止水从所述轴与所述壳体的交界处泄露至所述流体腔外,一方面可避免降低所述泵的工作效率,另一方面可防止泄露的水流至所述电机,导致所述电机损坏、腐蚀,再一方面,还可延长所述机械密封装置的使用寿命,保证所述泵的密封可靠性。
第三方面,本申请提供一种机械密封方法,应用在如上任一项所述的所述流体机械设备上,所述机械密封方法包括:
获取所述流体腔内的流体状态;
根据所述流体状态控制所述驱动结构驱动所述滑动环的第二端面沿轴向朝向所述动环方向移动或者解除对所述第二端面的朝向所述动环的驱动力。
在一种可能的实现方式中,当所述滑动环的硬度为第一硬度,所述静环的硬度为第二硬度时,所述根据所述流体状态控制所述驱动结构驱动所述滑动环的第二端面沿轴向朝向所述动环方向移动或者解除对所述第二端面的朝向所述动环的驱动力,包括:
判断所述流体状态是否为所述第一状态,所述第一状态为所述流体中的气体含量大于或者等于第一预设值,且所述流体中的固体含量小于第二预设值;
当所述流体状态为所述第一状态时,控制所述驱动结构驱动所述滑动环的第二端面沿轴向朝向所述动环方向移动,以使所述第二端面与所述动环形成密封面,所述第一端面和所述动环之间形成间隙。
在一实施方式中,所述根据所述流体状态控制所述驱动结构驱动所述滑动环的第二端面沿轴向朝向所述动环方向移动或者解除对所述第二端面的朝向所述动环的驱动力,还包括:
当流体状态不是所述第一状态时,判断流体状态是否为所述第二状态;
当流体状态为所述第二状态时,控制所述驱动结构解除对所述第二端面的朝向所述动环的驱动力,以使所述第一端面与所述动环形成密封面。通过所述第一端面与所述动环形成的密封面实现机械密封;
当流体状态不是所述第一状态也不是所述第二状态时,所述驱动结构不工作。
在一种可能的实现方式中,所述滑动环的硬度为第二硬度,所述静环的硬度为第一硬度时,所述根据所述流体状态控制所述驱动结构驱动所述滑动环的第二端面沿轴向朝向所述动环方向移动或者解除对所述第二端面的朝向所述动环的驱动力,包括:
判断流体状态是否为所述第一状态;
当流体状态为所述第一状态时,控制所述驱动结构解除对所述第二端面的朝向所述动环的驱动力,以使所述第一端面与所述动环形成密封面。
在一实施方式中,所述根据所述流体状态控制所述驱动结构驱动所述滑动环的第二端面沿轴向朝向所述动环方向移动或者解除对所述第二端面的朝向所述动环的驱动力,还包括:
当流体状态不是所述第一状态时,判断流体状态是否为所述第二状态;
当流体状态为所述第二状态时,控制所述驱动结构驱动滑动环的所述第二端面沿轴向朝向所述动环方向移动,以使所述第二端面与所述动环形成密封面,所述第一端面和所述动环之间形成间隙;
当流体状态不是所述第一状态也不是所述第二状态时,流体状态为所述第三状态,所述驱动结构不工作。所述驱动结构不工作是指所述驱动结构维持原有的状态,不进一步发生运作。
本申请中,通过滑动环的设置,动环可与不同硬度的滑动环和静环形成不同的密封面,不同的密封面适用在不同的流体环境中,使机械密封装置可适应不同的流体环境,扩大机械密封装置的使用范围,增强机械密封装置的密封效果,提高流体机械设备的功效及安全性能。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对本申请实施例中所需要使用的附图进行说明。
图1是本申请一实施方式提供的流体机械设备的结构示意图;
图2是本申请一实施方式提供的流体机械设备的结构示意图;
图3是本申请一实施方式提供的机械密封装置的结构剖面图;
图4是本申请一实施方式提供的流体机械设备的局部剖面图;
图5是本申请一实施方式提供的流体机械设备的局部剖面图;
图6是本申请一实施方式提供的流体机械设备的局部剖面图;
图7是本申请一实施方式提供的泵的结构示意图;
图8是本申请一实施方式提供的机械密封装置的结构剖面图;
图9是本申请一实施方式提供的机械密封装置的结构剖面图;
图10是本申请一实施方式提供的机械密封装置的结构剖面图;
图11是图3中M部分的局部放大图;
图12是本申请一实施方式提供的机械密封装置的结构剖面图;
图13是本申请一实施方式提供的机械密封装置的结构剖面图;
图14是本申请一实施方式提供的机械密封装置的结构剖面图;
图15是本申请一实施方式提供的机械密封装置的结构剖面图;
图16是本申请一实施方式提供的机械密封装置的结构剖面图;
图17是本申请一实施方式提供的机械密封方法的流程图;
图18是本申请一实施方式提供的机械密封方法的流程图;
图19是本申请一实施方式提供的机械密封方法的流程图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。
本文中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本申请的描述中,除非另有说明,“多个”的含义是两个或两个以上。
此外,本文中,“上”、“下”等方位术语是相对于附图中的结构示意置放的方位来定义的,应当理解到,这些方向性术语是相对的概念,它们用于相对于的描述和澄清,其可以根据结构所放置的方位的变化而相应地发生变化。
本申请提供一种机械密封装置,机械密封装置包括静环、滑动环、动环和驱动结构,滑动环沿静环的径向设在静环的内部或套设在静环的外部,滑动环和静环沿静环的周向固定且能够沿静环的轴向相对移动,静环和滑动环的硬度不同;动环沿轴向设置于静环和滑动环的同一端;驱动结构用于驱动滑动环沿轴向朝向动环移动,以使滑动环与动环形成密封面,且静环和动环之间形成间隙;驱动结构对静环的朝向动环的驱动力解除时,静环和动环之间抵接形成密封面。机械密封装置通过滑动环与动环形成的密封面或者静环和动环形成的密封面实现密封效果,可应用在不同的流体状态中,延长机械密封装置使用寿命。
请参阅图1,本申请一实施方式提供一种流体机械设备10,流体机械设备10包括流体腔100、轴200和机械密封装置300,流体腔100用于收容流体F,轴200安装在流体腔100内且延伸至流体腔100外。流体机械设备10还包括壳体101,流体腔100位于壳体101的内部空间,轴200安装在流体腔100内且穿过壳体101延伸至流体腔100外,在本实施方式中,轴200的其中一端穿过壳体101延伸至壳体外(如图1所示),轴200的另一端位于流体腔100内。在一实施方式中,轴200的两端均穿过壳体101延伸至壳体外(如图2所示),此时轴200与壳体101有两个交界处,在两个轴200与壳体101的交界处均设置机械密封装置300。
其中,机械密封装置300位于轴200与壳体101的交界处,用于隔绝流体腔100内部和外部环境。其中,壳体101的截面可以为圆形、椭圆形、多边形等,壳体101具体的形状根据实际使用场景设置。
在本实施方式中,机械密封装置300中的动环、静环和滑动环套设在轴200上,动环位于流体腔100内,机械密封装置300通过滑动环与动环形成的密封面或者静环和动环形成的密封面实现流体腔100内和流体腔100外之间的密封。
在本申请中,采用机械密封装置300对流体机械设备10的流体腔100内和流体腔100外之间实现密封,一方面,机械密封装置300可防止流体腔100内的流体F通过轴200与壳体101的交界处泄露至流体腔100外,导致流体F的流失和损坏外部器件;另一方面,机械密封装置300可防止壳体101外的空气、液体通过进入流体腔100内,污染流体腔100内的流体F或者损坏流体腔100内设备;再一方面,结合图3所示,流体机械设备10在使用时,流体腔100内的流体状态会不同,例如流体F中会包含固体杂质或者气泡,机械密封装置300可根据流体状态的不同来使用滑动环320与动环330形成的密封面或者使用静环310和动环330形成的密封面实现流体腔100内和流体腔100外之间的密封,以延长机械密封装置300的使用寿命。
在一种可能的实现方式中,流体机械设备10还包括叶轮110和电机210(如图1所示),叶轮110位于流体腔100内且与轴200固定连接,电机210位于流体腔100外且与轴200连接,电机210用于驱动轴200旋转,轴200旋转带动叶轮110旋转。其中叶轮110和电机210的结构不限于图1所示的结构,具体可根据实际需要来设置。
在一种可能的实现方式中,流体机械设备10为泵11(如图7所示)、离心机、反应釜或压缩机中的一种。
下面详细介绍本申请的机械密封装置300。
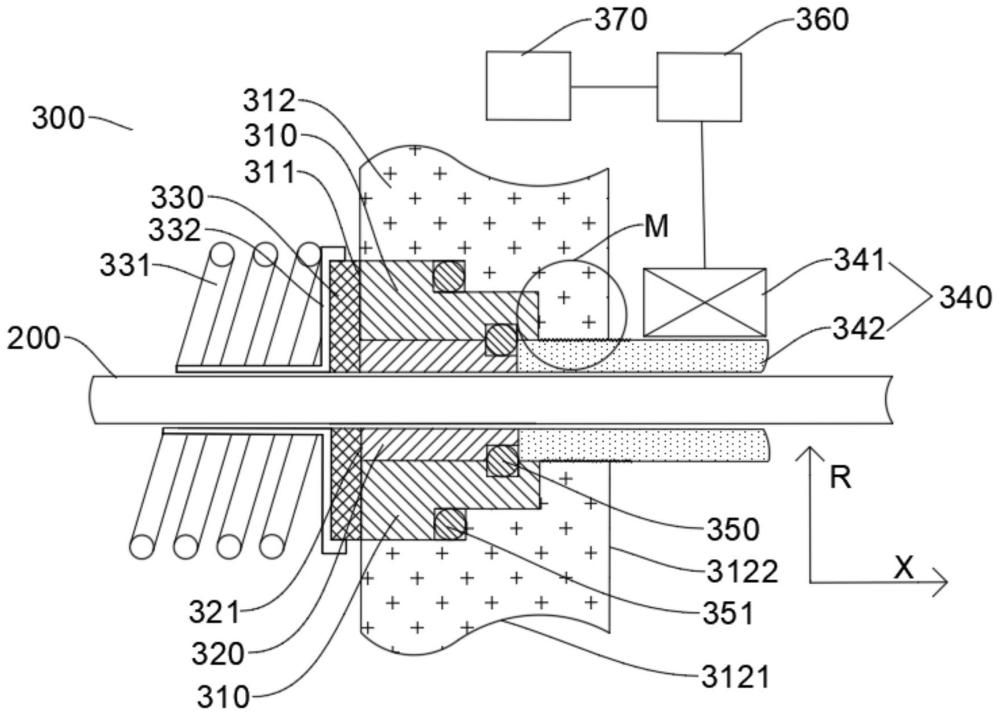
请参阅图3,本申请一实施方式提供一种机械密封装置300,包括静环310、滑动环320、动环330和驱动结构340。其中,静环310和动环330用于套设在轴200上且沿轴向排列,静环310能够与轴200相对旋转,也就是说当轴200旋转时,静环310保持不动,动环330与轴200在周向上固定,也就是说轴200的旋转能够带动动环330同步旋转,当轴200旋转时,动环330跟随轴200旋转。
静环310包括第一端面311,滑动环320包括第二端面321,滑动环320沿静环310的径向R设在静环310的内部或套设在静环310的外部,滑动环320和静环310沿静环310的周向固定且能够沿静环310的轴向相对移动,静环310和滑动环320的硬度不同。其中,静环310和滑动环320中的一个的硬度为第一硬度,静环310和滑动环320中的另一个的硬度为第二硬度,第一硬度小于第二硬度。
其中,滑动环320沿静环310的径向R套设在静环310的外部是指滑动环320套设在静环310的外周侧,滑动环320沿静环310的径向R设在静环310的内部是指静环310套设在滑动环320的外周侧,静环310的外周侧是指静环310远离轴200的外周面的一侧,滑动环320的外周侧是指滑动环320远离轴200的外周面的一侧。在本实施方式中,静环310套设在滑动环320的外周侧。静环310、滑动环320、动环330的轴向方向为第一方向X(如图3所示),静环310在第一方向X上靠近动环330的一端面为第一端面311,滑动环320在第一方向X上靠近动环330的一端面为第二端面321。滑动环320和静环310沿周向固定且能够沿轴向相对移动,说明滑动环320和静环310在圆周方向上保持相对固定不动,但在轴向(第一方向X)上可以相对滑动,在本实施方式中,静环310与轴200保持轴向固定,滑动环320相对轴200沿轴向滑动,以使滑动环320和静环310沿轴向相对滑动。
动环330沿轴向(第一方向X)设置于静环310和滑动环320的一端,动环330沿轴向弹性抵接至第一端面311或第二端面321。在本实施方式中,动环330的硬度大于或者等于第一硬度。在一些实施方式中,动环330的硬度小于第一硬度。
其中,弹性抵接是指动环330对第一端面311或第二端面321具有弹力,使得动环330与第一端面311或第二端面321之间相互抵接。在一实施方式中,机械密封装置300还包括弹性件331,弹性件331套设在轴200上,且位于动环330远离静环310的一端,通过弹性件331的设置,实现动环330沿轴向弹性抵接至第一端面311或第二端面321。其中,弹性件331的弹力沿第一方向X作用在动环330上,弹性件331使动环330与第一端面311或第二端面321紧密贴合形成密封面。在本实施方式中,弹性件331为弹簧。在一实施方式中,弹性件331为弹片或弹性体。
请继续参阅图3,在一实施方式中,机械密封装置300还包括动环支撑架332,动环支撑架332套设在轴200上,弹性件331、动环支撑架332和动环330沿第一方向X设置,动环支撑架332与动环330固定连接或抵接,且动环支撑架332与弹性件331固定连接或抵接,动环支撑架332与弹性件331配合,以使动环330与第一端面311或第二端面321的贴合更加紧密。其中动环支撑架332的具体形状可根据动环330和弹性件331的结构和尺寸来设置。在一些实施方式中,弹性件331可直接与动环330固定连接或者抵接。其中抵接是指两部件之间相互接触且两部件之间具有相互作用力,例如弹性件331与动环330抵接,是指弹性件331与动环330接触,且弹性件331对动环330具有弹力,动环330对弹性件331具有反作用力。
驱动结构340用于驱动第二端面321沿轴向(第一方向X)朝向动环330移动(如图3所示),以使第二端面321与动环330形成密封面,第一端面311和动环330之间形成间隙,驱动结构340对第二端面321的朝向动环330的驱动力解除时,第一端面311和动环330之间抵接形成密封面。
在本实施方式中,动环330、静环310和滑动环320套设在轴200上(如图3所示),动环330位于流体腔100内,动环330固定在轴200上且可随着轴200旋转,静环310和滑动环320则不会随着轴200旋转,当轴200旋转时,轴200旋转带动动环330旋转,动环330相对静环310和滑动环320旋转。
请参阅图4,驱动结构340与至少部分滑动环320抵接或固定连接,驱动结构340驱动滑动环320朝向动环330运动,使滑动环320与动环330抵接,静环310在第一方向X上位置固定,驱动结构340继续驱动滑动环320朝向动环330运动,滑动环320推动动环330向远离静环310的方向运动,动环330与静环310呈脱离接触状态,动环330与静环310之间具有间隙,此时动环330相对滑动环320旋转且仅与第二端面321弹性抵接,第二端面321与动环330形成密封面,记为第二密封面302。此时,机械密封装置300通过第二密封面302实现流体腔100内和流体腔100外的密封。
请参阅图5,在本实施方式中,驱动结构340与滑动环320抵接,驱动结构340对滑动环320朝向动环330的驱动力解除的方式包括将驱动结构340朝向远离动环330的方向移动,当驱动结构340对滑动环320朝向动环330的驱动力解除时,弹性件331对动环330的弹力推动滑动环320向远离动环330的方向移动,直至动环330与静环310抵接,动环330不能继续沿第一方向X运动,驱动结构340继续向远离动环330的方向移动,直至动环330与滑动环320不能紧密贴合(如图5所示),此时动环330相对静环310旋转且与第一端面311弹性抵接,静环310的第一端面311与动环330形成密封面,记为第一密封面301(如图5所示)。在本实施方式中,驱动结构340解除,动环330与静环310抵接时,驱动结构340继续沿着第一方向X背离动环330运动,使驱动结构340朝向滑动环320的端面与动环330朝向滑动环320的端面之间的距离大于滑动环320在第一方向X上的长度,滑动环320可位于驱动结构340和滑动环320之间的任意位置,此时即使滑动环320的第二端面321与动环330接触,由于滑动环320上并无额外的朝向动环330的作用力,第二端面321与动环330之间不能紧密贴合形成有效的密封面,此时,机械密封装置300通过第一密封面301实现流体腔100内和流体腔100外的密封。
在一实施方式中,驱动结构340与滑动环320固定连接(如图6所示)。当驱动结构340对滑动环320朝向动环330的驱动力解除时,驱动结构340沿第一方向X远离动环330运动,驱动结构340带动滑动环320向远离动环330的方向运动,使动环330与第二端面321形成间隙。
静环310、滑动环320、动环330的硬度不同,会影响机械密封装置300的适用场景。静环310和滑动环320的硬度不同,动环330和静环310形成的第一密封面301与动环330和滑动环320形成的第二密封面302能够适用不同场景。
其中,流体可为液体或者能够流动的浆液、熔融体,液体包括水、有机溶剂、混合有机溶剂等。当流体F为液体时,动环330与静环310或滑动环320形成密封面均可达到机械密封效果。
当流体F中混入固体颗粒物,当构成密封面的材质的硬度越大,越不容易被固体颗粒物磨损,若使用静环310和滑动环320中硬度较小的一个与动环330搭配使用,则坚硬的固体颗粒物容易损伤静环310和滑动环320中硬度较小的一个,导致密封性能降低,甚至失去密封效果,此时应使用静环310和滑动环320中硬度较大的一个与动环330搭配使用,在本实施方式中,动环330的硬度大于或者等于第一硬度,静环310和滑动环320中硬度较大的一个与动环330的硬度均较大,当有坚硬的固体颗粒进入密封面时,不会损伤密封面,延长密封面的使用寿命;在一实施方式中,动环330的硬度小于第一硬度时,静环310和滑动环320中硬度较大的一个与动环330搭配使用,相较于静环310和滑动环320中硬度较小的一个与动环330搭配使用,密封面损伤更低,可以延长密封面的使用寿命。
当流体F中有气体存在时,当构成密封面的材质的硬度越大,在旋转密封时产生的热量越大,若使用静环310和滑动环320中硬度较大的一个与动环330搭配使用,在本实施方式中,动环330的硬度大于或者等于第一硬度,动环330与静环310和滑动环320中硬度较大的一个摩擦产生大量的热量,热量不易导出,导致机械密封装置300容易被烧坏,此时使用静环310和滑动环320中硬度较小的一个与动环330搭配使用,密封面间的摩擦产热少,降低密封面烧毁的风险,延长机械密封装置300的使用寿命;在一实施方式中,动环330的硬度小于第一硬度时,静环310和滑动环320中硬度较小的一个与动环330搭配使用,相较于静环310和滑动环320中硬度较大的一个与动环330搭配使用,密封面间的摩擦产热更少,延长密封面的使用寿命。
在一实施方式中,机械密封装置300仅使用静环310和动环330形成密封面达到密封效果,静环310和动环330形成密封面不能适应多种流体状态,当流体腔100内流体F的性质发生变化,静环310或动环330的硬度不改变时容易导致机械密封装置300损坏,若采用更换静环310或动环330的方法去适应流体F的环境则需重新拆卸、组装机械密封装置300,导致使用不方便或根本不能实现。
在本申请中,通过滑动环320的设置(如图3至图6所示),动环330可与不同硬度的滑动环320和静环310分别形成第二密封面302、第一密封面301,第一密封面301、第二密封面302适用在不同的流体F的环境,使机械密封装置300可适应不同的流体F的环境,扩大机械密封装置300的使用范围,增强机械密封装置300的密封效果,提高流体机械设备10的功效及安全性能。
在一种可能的实现方式中,静环310的硬度为第一硬度,滑动环320的硬度为第二硬度。即静环310的硬度小于滑动环320的硬度,动环330的硬度大于静环310的硬度。在一实施方式中,动环330的硬度还大于滑动环320的硬度。在一实施方式中,动环330的硬度可小于滑动环320的硬度且大于静环310的硬度。在一实施方式中,动环330的硬度可小于滑动环320的硬度,且小于静环310的硬度。
在一实施方式中,静环310的材质为石墨,滑动环320的材质为碳化硅,石墨的硬度小于碳化硅的硬度。
在一实施方式中,滑动环320、静环310、动环330的材质选自酚醛塑料、尼龙、聚四氟乙烯、浸树脂石墨、橡胶、陶瓷、堆焊硬质合金、碳化钨合金、锡青铜、钢结硬质合金、不锈钢、石墨、碳化硅,且满足静环310的硬度小于滑动环320和动环330的硬度,可根据流体腔100中的流体或者实际需要调整滑动环320、静环310、动环330的硬度差值。例如,在一实施方式中,第二硬度和第一硬度为莫氏硬度标准,第二硬度的等级比第一硬度的等级至少大1个等级。在一实施方式中,第二硬度和第一硬度为莫氏硬度标准,第二硬度的等级比第一硬度的等级大2个等级。在一实施方式中,第二硬度和第一硬度采用洛氏硬度A标尺(HRA),第二硬度为80HRA-90HRA,第一硬度为55HRA-70HRA。在一实施方式中,第二硬度和第一硬度采用洛氏硬度A标尺(HRA),第二硬度的取值比第一硬度的取值至少大10HRA。在一实施方式中,第二硬度和第一硬度采用洛氏硬度A标尺(HRA),第二硬度的取值比第一硬度的取值大20HRA。
当流体F为液体时,流体状态包括第一状态、第二状态和第三状态,第一状态为流体中的气体含量大于或者等于第一预设值,且流体中的固体含量小于第二预设值;第二状态为流体中的固体含量大于或者等于第二预设值,且流体中的气体含量小于第一预设值;第三状态为流体中的气体含量小于第一预设值,且流体中的固体含量小于第二预设值。其中第一预设值和第二预设值可根据滑动环320、静环310、动环330的硬度或者尺寸等来设置,还可根据实际需要来设置。
在本实施方式中,滑动环320的硬度大于静环310的硬度,动环330的硬度大于静环310的硬度,本实施方式以流体机械设备10为泵11为例来说明机械密封装置300在泵11中的工作过程,当机械密封装置300应用在泵11上时(如图7所示),流体腔100内的流体F为水,通过叶轮110旋转带动水进入和离开流体腔100。其中流体腔100包括入口102和出口103,水从入口102沿第一方向X进入流体腔100,并从出口103沿第二方向Y传输至流体腔100外,第二方向Y与第一方向X垂直,其中,静环310套设在滑动环320的外周侧(如图3所示),且静环310与壳体101的内表面固定连接。
泵11工作时,进入流体腔100中的水包括前面所述的第一状态、第二状态和第三状态,当流体状态为第二状态时,即水中混入较多固体颗粒,驱动结构340驱动滑动环320朝向动环330运动,使滑动环320与动环330贴紧形成第二密封面302(如图4所示),且动环330与静环310的第一端面311形成间隙,动环330与第二端面321形成的第二密封面302对流体腔100进行密封,由于滑动环320的硬度大于静环310的硬度,构成第二密封面302的材质的硬度均较大,机械密封装置300不易被固体磨损,可提高机械密封装置300的使用寿命。
当流体状态为第一状态时,即水中存在较多气体,驱动结构340对滑动环320朝向动环330方向的驱动力解除(如图5所示),在弹性件331的作用下,动环330沿第一方向抵接至静环310并与静环310紧密贴合形成第一密封面301,滑动环320上无额外的朝向动环330方向的驱动力使第二端面321与动环330贴紧,此时第二端面321与动环330接触形成间隙,机械密封装置300中起密封作用的是动环330与第一端面311形成的第一密封面301,由于静环310的硬度小于滑动环320的硬度,机械密封装置300不易产生大量的热量而烧坏,机械密封装置300的使用寿命因此提高。
当流体状态为第三状态时,即水中的气泡或者固体颗粒物均较少,或者没有气泡和固体颗粒物时,动环330与静环310形成的第一密封面301或动环330与滑动环320形成的第二密封面302均可达到机械密封效果。
也就是说在本实施例方式中的泵11通过滑动环320的设置,使机械密封装置300可形成不同的密封面以适应不同水的状态,防止水从轴200与壳体101的交界处泄露至流体腔100外,一方面可避免降低泵11的工作效率,另一方面可防止泄露的水流至电机210,导致电机210损坏、腐蚀,再一方面,还可延长机械密封装置300的使用寿命,保证泵11的密封可靠性。
需要说明的是,图7中的泵11只是示例性介绍,不对泵11的构成造成限制,本申请中泵11还可以为其他结构。
在一种可能的实现方式中,静环310的硬度为第二硬度,滑动环320的硬度为第一硬度,即静环310的硬度大于滑动环320的硬度。在一实施方式中,动环330的硬度大于滑动环320的硬度。在一实施方式中,动环330的硬度还大于静环310的硬度。在一实施方式中,动环330的硬度可小于静环310的硬度,且大于滑动环320的硬度。
在一实施方式中,滑动环320的材质为石墨,静环310的材质为碳化硅,石墨的硬度小于碳化硅的硬度。在一实施方式中,滑动环320、静环310、动环330的材质选自酚醛塑料、尼龙、聚四氟乙烯、浸树脂石墨、橡胶、陶瓷、堆焊硬质合金、碳化钨合金、锡青铜、钢结硬质合金、不锈钢、石墨、碳化硅,且满足滑动环320的硬度小于静环310和动环330的硬度,可根据实际需要调整滑动环320、静环310、动环330的硬度差值。
在本实施方式中,静环310的硬度大于滑动环320的硬度,动环330的硬度大于静环310的硬度,当流体F处于第三状态时,动环330与静环310或滑动环320形成密封面均可达到机械密封效果;当流体F处于第一状态时,即流体F中含有较多的气泡,驱动结构340驱动硬度较小的滑动环320朝向动环330运动,使滑动环320与动环330贴紧形成第二密封面302(如图4所示),且动环330与第一端面311形成间隙,动环330与第二端面321形成的第二密封面302对流体腔100进行密封,由于滑动环320的硬度小于静环310的硬度,机械密封装置300不易产生大量的热量而烧坏,机械密封装置300的使用寿命因此提高;当流体F处于第二状态时,即流体F中含有较多的固体颗粒物,驱动结构340沿第一方向X运动,驱动结构340对滑动环320朝向动环330方向的驱动力解除,在弹性件331的作用下,动环330沿第一方向抵接至静环310并与静环310紧密贴合形成第一密封面301,滑动环320上无额外的朝向动环330方向的驱动力使第二端面321与动环330贴紧,此时第二端面321与动环330接触或形成间隙,机械密封装置300中起密封作用的是动环330与第一端面311形成的第一密封面301,由于静环310的硬度大于滑动环320的硬度,构成第二密封面302的材质的硬度均较大,机械密封装置300不易被固体磨损,可提高机械密封装置300的使用寿命。
在一实施方式中,机械密封装置300包括多个硬度不同的滑动环320,驱动结构340可分别驱动滑动环320朝向动环330运动,使每个滑动环320均可与动环330贴紧形成密封面。在一实施方式中,驱动结构340同时驱动至少两个滑动环320朝向动环330运动,使至少两个滑动环320同时与动环330贴紧形成密封面。多个滑动环320的设置,可进一步扩大机械密封装置300的适用场景和使用范围。
请继续参阅图3,在一种可能的实现方式中,驱动结构340与滑动环320远离动环330的一端抵接或者固定连接。当驱动结构340与滑动环320抵接时,滑动环320向远离动环330的方向移动,是通过弹性件331对动环330的弹力作用驱动动环330移动,动环330再带动滑动环320来实现的。当驱动结构340与滑动环320固定连接时,驱动结构340能够直接驱动滑动环320沿第一方向X远离动环330的方向移动,使滑动环320不依靠弹性件331的作用也可沿第一方向X运动,且驱动结构340可带动滑动环320远离动环330,使第二端面321与动环330形成间隙,可以使机械密封装置300面对环境变化的响应速度更快,更好地适应流体F的环境变化。
请继续参阅图3,在一种可能的实现方式中,静环310套设在滑动环320的外周侧。滑动环320需要在第一方向X上远离或靠近动环330运动,将滑动环320位于静环310内侧,滑动环320的尺寸可设置的相对较小,进而使得滑动环320与静环310或者轴200之间的摩擦力较小,从而可使得驱动结构340能够较容易的推动滑动环320在第一方向X上滑动。
在一种可能的实现方式中,驱动结构340对第二端面321的朝向动环330的驱动力解除时,第一端面311和第二端面321平齐(如图3所示)。若第一端面311和第二端面321不平齐,使得工艺设计复杂,且在驱动结构340驱动第二端面321运动时需要多运动一段距离才可与动环330抵接,或弹性件331使动环330与第一端面311抵接时动环330需多运动一段距离,增加机械密封装置300的损耗。而第一端面311和第二端面321平齐,一方面该设计可降低工艺加工难度,且增加机械密封装置300的工作效率、减少工作损耗;另一方面,动环330靠近静环310和滑动环320的端面为一平面,使动环330与第一端面311或第二端面321贴合精度高。
请继续参阅图3,在一种可能的实现方式中,静环310套设在滑动环320的外周侧,机械密封装置300还包括静环支撑架312,静环支撑架312用于在静环310的外周面固定静环310。静环310与静环支撑架312固定连接,防止静环310在流体机械设备10运作过程中松动而导致静环310和动环330之间的密封效果降低。
在一种可能的实现方式中,静环支撑架312包括相互连接的周面支撑部3121和位于周面支撑部3121一端的端面支撑部3122(如图3所示),周面支撑部3121用于在静环310的外周侧固定静环310,端面支撑部3122覆盖静环310远离动环330的端面,露出滑动环320远离动环330的至少部分端面,驱动结构340位于端面支撑部3122的内周侧,且与滑动环320远离动环330的端面抵接或者固定连接,以驱动滑动环320沿轴向朝向动环330移动。
在本实施方式中,滑动环320远离动环330的端面全部未被端面支撑部3122覆盖,驱动结构340与滑动环320远离动环330的端面抵接或者固定连接。在一实施方式中,滑动环320远离动环330的部分端面被端面支撑部3122覆盖,露出滑动环320远离动环330的部分端面,驱动结构340的结构与露出的滑动环320端面相抵接或者固定连接(如图8所示)。
在一实施方式中,端面支撑部3122设有贯穿端面支撑部3122的通孔3123(如图9和图10所示),露出至少部分滑动环320远离动环330的端面,驱动结构340穿过通孔3123,并与滑动环320远离动环330的端面抵接或者固定连接。在本实施方式中,静环310的外周侧和远离动环330的端面均被静环支撑架312覆盖,使静环310在径向R和轴向方向均被固定,增强静环310的稳固性。滑动环320远离动环330的部分端面被端面支撑部3122覆盖,滑动环320远离动环330的部分端面与端面支撑部3122之间具有间隙,使滑动环320限位在动环330和端面支撑部3122之间,防止滑动环320沿第一方向X脱离机械密封装置300,使机械密封装置300的密封效果降低,且达不到多场景适用的目的。在一实施方式中,可设置多个通孔3123,使驱动结构340有足够的驱动力驱动滑动环320运动。
请参考图11,在一种可能的实现方式中,端面支撑部3122的内表面与驱动结构340的外表面螺纹连接。端面支撑部3122与驱动结构340接触的表面设有螺纹343,驱动结构340与端面支撑部3122接触的表面也设有相匹配的螺纹343,端面支撑部3122中的螺纹与驱动结构340的螺纹相互配合,使驱动结构340通过旋转实现在第一方向X上运动,端面支撑部3122与驱动结构340螺纹连接使驱动结构340的运动具有精密度更高的可控性,提升机械密封装置300的密封效果。
请参阅图12,在一种可能的实现方式中,滑动环320套设在静环310的外周侧。静环310位于滑动环320与轴200之间。
在一种可能的实现方式中,机械密封装置300还包括静环支撑架312,滑动环320位于静环支撑架312与静环310之间,静环支撑架312包括相互连接的周面支撑部3121和位于周面支撑部3121一端的端面支撑部3122(如图12所示),周面支撑部3121于滑动环320的外周侧,端面支撑部3122用于在静环310远离动环330的端面固定静环310,端面支撑部3122设有贯穿端面支撑部3122的通孔3123,露出至少部分滑动环320远离动环330的端面,驱动结构340穿过通孔3123,并与滑动环320远离动环330的端面抵接或者固定连接,以驱动滑动环320沿轴向朝向动环330移动。在本实施方式中,静环310与端面支撑部3122固定连接,滑动环320与周面支撑部3121可相对滑动。
在一实施方式中,端面支撑部3122设有多个通孔3123(如图13所示),驱动结构340穿过多个通孔3123与滑动环320抵接或固定连接,使驱动结构340有足够的驱动力驱动滑动环320运动。在一实施方式中,驱动结构340与通孔3123接触的外表面设有螺纹,通孔3123与驱动结构340接触的内表面设有螺纹,驱动结构340与通孔3123螺纹连接,使驱动结构340的运动具有精密度更高的可控性。滑动环320限位在周面支撑部3121和静环310之间,且滑动环320限位在端面支撑部3122和动环330之间,使机械密封装置300的整体稳固性提高,可以更好发挥密封效果。
在一种可能的实现方式中,静环310和滑动环320之间设有第一密封圈350(如图3和图12所示)。第一密封圈350将静环310和滑动环320之间的缝隙密封,防止流体F从静环310和滑动环320之间的缝隙流出流体腔100外,第一密封圈350可增强机械密封装置300的密封性能。其中第一密封圈350为具有弹力的密封圈,可为橡胶圈。
在一实施方式中,滑动环320套设在静环310的外周侧,滑动环320与静环支撑架312之间设有第二密封圈351(如图12所示),第二密封圈351将滑动环320与静环支撑架312之间的缝隙密封,防止流体F从滑动环320与静环支撑架312之间的缝隙流出流体腔100外,第二密封圈351可增强机械密封装置300的密封性能。
在一实施方式中,静环310套设在滑动环320的外周侧,静环310与静环支撑架312之间设有第二密封圈351(如图3所示),第二密封圈351将静环310与静环支撑架312之间的缝隙密封,防止流体F从静环310与静环支撑架312之间的缝隙流出流体腔100外,第二密封圈351可增强机械密封装置300的密封性能。
请再次参阅图3,在一种可能的实现方式中,驱动结构340包括驱动电机341和滑动环调节杆342,滑动环调节杆342位于滑动环320远离动环330的一端,驱动电机341用于驱动滑动环调节杆342沿轴向移动,带动滑动环320沿轴向朝向动环330移动。在本实施方式中,滑动环调节杆342的延伸方向为第一方向X,滑动环调节杆342的延伸方向与滑动环320的轴向方向一致,滑动环调节杆342的驱动力直接作用于滑动环320上,可更好驱动滑动环320运动。在一实施方式中,滑动环调节杆342的延伸方向与滑动环320的轴向方向成夹角设置(如图15和图16所示),可减小机械密封装置300在第一方向X上的尺寸,适应不同流体机械设备10的内部空间环境。
请继续参阅图15,在一实施方式中,滑动环调节杆342的延伸方向与滑动环320的轴向方向成夹角设置,其中夹角的取值大于0°,且小于或者等于90°,滑动环320套设在静环310的外周侧,周面支撑部3121设有槽道3124,滑动环调节杆342通过槽道3124与滑动环320的抵接或固定连接,滑动环320限位在端面支撑部3122和动环330之间,并且端面支撑部3122和动环330之间留有空隙3125使滑动环320可在端面支撑部3122和动环330之间运动,滑动环调节杆342在槽道3124内可驱动滑动环320沿第一方向X或背离第一方向X运动。
请继续参阅图16,在一实施方式中,滑动环调节杆342的延伸方向与滑动环320的轴向方向成夹角设置,其中夹角的取值大于0°,且小于或者等于90°,静环310套设在滑动环320的外周侧,周面支撑部3121和静环310设有槽道3124,滑动环调节杆342通过槽道3124与滑动环320的周侧抵接、卡接或固定连接,端面支撑部3122和动环330将滑动环320限位在端面支撑部3122和动环330之间并预留空隙3125使滑动环320可在端面支撑部3122和动环330之间运动,滑动环调节杆342在槽道3124内可驱动滑动环320沿第一方向X或背离第一方向X运动,其中槽道3124沿第一方向X的尺寸大于滑动环调节杆342沿第一方向X的尺寸,使得滑动环调节杆342可在槽道3124内沿第一方向X移动。
请继续参阅图10和图14,在一种可能的实现方式中,滑动环调节杆342呈中空结构且与滑动环320同轴设置,滑动环调节杆342的内径大于或等于滑动环320的内径,滑动环调节杆342的外径小于或等于滑动环320的外径。在本实施方式中,静环310套设在滑动环320的外周侧,滑动环调节杆342与滑动环320远离动环330的端面抵接或固定连接,滑动环调节杆342的内径大于或等于滑动环320的内径有利于将滑动环调节杆342套设在轴200上,且在相对轴滑动时,可减少滑动环调节杆342与轴200的摩擦,提高驱动电机341的效率,减少能源损耗。滑动环调节杆342的外径小于或等于滑动环320的外径,使滑动环调节杆342在驱动滑动环320运动过程中,减少滑动环调节杆342与静环310的摩擦,提高驱动电机341的效率,减少能源损耗。
在一实施方式中,滑动环调节杆342的外径等于滑动环320的外径(如图3所示),且滑动环调节杆342的内径等于滑动环320的内径,滑动环320远离动环330的端面被滑动环调节杆342覆盖,滑动环320沿第一方向X的两端被限位在动环330与滑动环调节杆342之间,滑动环调节杆342与滑动环320的接触面积大,或者说滑动环调节杆342与滑动环320之间的作用力面积大,更有利于驱动滑动环320的运动。
在一实施方式中,滑动环调节杆342为圆柱结构(如图12和图13所示),滑动环调节杆342与滑动环320远离动环330的部分端面抵接或固定连接,滑动环调节杆342设置在轴200的外周侧且与轴200平行,滑动环调节杆342的直径小于或等于滑动环320的外径与内径之差,以使滑动环调节杆342在驱动滑动环320运动过程中,不易遭受静环310或轴200的阻碍而难以继续运动,为了滑动环调节杆342可以更有效驱动滑动环320运动,可设置多根滑动环调节杆342。在一实施方式中,滑动环调节杆342还可以为扁平状、圆弧片状细长方体状,可根据实际需要设置。
在一实施方式中,滑动环调节杆342与滑动环320周侧抵接、卡接或固定连接(如图16所示),滑动环调节杆342的直径可按照实际需要设置,以提供更有效的驱动力。
请继续参阅图3,在一种可能的实现方式中,机械密封装置300还包括检测装置360和控制器370(如图3所示),检测装置360用于检测流体状态,控制器370根据流体状态控制驱动结构340驱动滑动环320的第二端面321沿轴向朝向动环330移动或者解除对第二端面321的朝向动环330的驱动力。
在一实施方式中,检测装置360为折射仪,通过检测流体F的折射率,以区分流体F的状态为第一状态、第二状态或第三状态,该检测的流体F的状态信息反馈至控制器370,控制器370对信息识别后控制驱动结构340的运动。在一实施方式中,检测装置360为密度分析仪,通过检测流体F的密度,以区分流体F的状态为第一状态、第二状态或第三状态。在一实施方式中,流体机械设备10为泵11,检测装置360位于泵11的入口102一侧,用于检测从入口102处进入流体腔100中的流体状态。在一实施方式中,检测装置360位于泵11的出口103一侧,用于检测从出口103处流出流体腔100中的流体状态。在其他实施方式中,检测装置360还可以为红外检测装置、传感器等,只要能够实现检测出液体的第一状态、第二状态或第三状态即可。
请参阅图17、图1和图3,本申请一实施方式提供机械密封方法,应用在如上所述的流体机械设备10上,机械密封方法包括步骤S10和步骤S20:
步骤S10,获取流体腔100内的流体状态。
步骤S20,根据流体状态控制驱动结构340驱动滑动环320的第二端面321沿轴向朝向动环330方向移动或者解除对第二端面321的朝向动环330的驱动力。
在一实施方式中,流体状态包括第一状态、第二状态和第三状态,第一状态为流体中的气体含量大于或者等于第一预设值,且流体中的固体含量小于第二预设值;第二状态为流体中的固体含量大于或者等于第二预设值,且流体中的气体含量小于第一预设值;第三状态为流体中的气体含量小于第一预设值,且流体中的固体含量小于第二预设值。
在一种可能的实现方式中,滑动环320的硬度为第一硬度,静环310的硬度为第二硬度时,第一硬度小于第二硬度,即滑动环320的硬度小于静环310的硬度,所述步骤S20包括步骤S10-1和步骤S20-1(如图18所示):
步骤S10-1,判断流体状态是否为第一状态;
步骤S20-1,当流体状态为第一状态时,控制驱动结构340驱动滑动环320的第二密封端321面沿轴向朝向动环330方向移动,以使第二端面321与动环330形成密封面,第一端面311和动环330之间形成间隙。通过第二端面321与动环330形成的密封面实现机械密封。
在一实施方式中,所述步骤S20还包括步骤S11-1、步骤S21-1和步骤S22-1(如图18所示):
步骤S11-1,当流体状态不是第一状态时,判断流体状态是否为第二状态;
步骤S21-1,当流体状态为第二状态时,控制驱动结构340解除对第二端面321的朝向动环330的驱动力,以使第一端面311与动环330形成密封面。通过第一端面311与动环330形成的密封面实现机械密封;
步骤S22-1,当流体状态不是第一状态也不是第二状态时,驱动结构340不工作。其中,流体状态不是第一状态也不是第二状态,即流体状态为第三状态,当流体为水时,可理解为第三状态中的水仅含有少量气泡或者少量固体颗粒物,或者第三状态中的水不含气泡和固定颗粒物。驱动结构340不工作是指驱动结构340维持原有的状态,不进一步发生运作,即当前如果是第一端面311与动环330形成的密封面进行机械密封时,此时驱动结构340不工作,即保持当前第一端面311与动环330形成的密封面进行机械密封;当前如果是第二端面321与动环330形成的密封面进行机械密封时,此时驱动结构340不工作,即保持当前驱动结构340不工作,即保持当前。也就是说此时第一端面311与动环330形成的密封面或者第二端面321与动环330形成的密封面均可实现密封。
在一种可能的实现方式中,滑动环320的硬度为第二硬度,静环310的硬度为第一硬度时,第一硬度小于第二硬度,即静环310的硬度小于滑动环320的硬度,所述步骤S20包括步骤S10-2和步骤S20-2(如图19所示):
步骤S10-2,判断流体状态是否为第一状态;
步骤S20-2,当流体状态为第一状态时,控制驱动结构340解除对第二端面321的朝向动环330的驱动力,以使第一端面311与动环330形成密封面。
在一实施方式中,所述步骤S20还包括步骤S11-2、步骤S21-2和步骤S22-2(如图19所示):
步骤S11-2,当流体状态不是第一状态时,判断流体状态是否为第二状态;
步骤S21-2,当流体状态为第二状态时,控制驱动结构340驱动滑动环的第二密封端321面沿轴向朝向动环330方向移动,以使第二端面321与动环330形成密封面,第一端面311和动环330之间形成间隙;
步骤S22-2,当流体状态不是第一状态也不是第二状态时,流体状态为第三状态,驱动结构340不工作。驱动结构340不工作是指驱动结构340维持原有的状态,不进一步发生运作。
在本实施方式中,机械密封方法同样适用于包含上述机械密封装置的流体机械设备中,机械密封装置和流体机械设备的结构如前所述,在此不再赘述。
以上对本申请实施例所提供的机械密封装置、流体机械设备和机械密封方法进行了详细介绍,本文中应用了具体个例对本申请的原理及实施例进行了阐述,以上实施例的说明只是用于帮助理解本申请的方法及其核心思想;同时,对于本领域的一般技术人员,依据本申请的思想,在具体实施例及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本申请的限制。
- 一种大弹簧机械密封装置及其生产方法
- 流体机械的轴密封结构和用于密封流体机械的轴的方法
- 带有密封装置的机械设备及用于安装该密封装置的方法