一种可适应多种地形的智能果园割草机器人
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及割草机器人技术领域,具体为一种可适应多种地形的智能果园割草机器人。
背景技术
智慧果园应用大数据、物联网、移动互联等现代信息技术,对基地种植区域的气象环境、土壤墒情、病虫害、农事活动等进行实时监测,实现果树生产智能化、经营网络化、管理高效化、服务便捷化,全面提高水果产业现代化水平,在智慧果园的管理中,为了提供果园内的环境采用栽种绿植来防止水土的流失,这类绿植会才采用智能割草机对其进行维护,通过智能化的产品来加大对智能果园的管理。
对此,中国申请专利号:CN206879446U,公开了一种悬挂式智能果园割草机,包括悬挂梁,悬挂梁的前端与拖拉机后悬置铰接,在悬挂架上设有油箱和液压泵,液压泵的转动轴通过万向联轴器与拖拉机后置动力输出轴相连,在悬挂梁的底部自前向后间隔设有两个空心型材,在悬挂梁的一侧后端设有前限深轮,在悬挂梁的另一侧设有伸缩铰接梁,在每个空心型材内分别活动设有连接梁,连接梁的一端与伸缩铰接梁的一侧固连,与空心型材相平行设置的伸缩油缸的活塞杆端与伸缩铰接梁铰接,缸底端与悬挂梁铰接,在伸缩铰接梁上设有后限深轮,伸缩铰接梁的后端与旋转刀架的一端铰接。本实用新型操作简单、使用可靠、作业效率高、可满足不同地区、不同用户除草需求,不损伤树干,又能将果树周边杂草进行清除。
对此,中国申请专利号:CN114830855A,公开了一种山地标准化果园智能除草机器人,包括履带车、控制系统、割草装置、株间伸缩割草装置,该机器人的底盘采用履带式底盘运动载体,在山地等复杂环境下具有良好的通过性;采用摄像头探测果树技术,能够对果园内的果树进行识别,从而实现精准作业;通过使用激光雷达,能够实现对果园地图进行实时构建,以实现果园智能除草机器人的自动行走。同时,本发明中的割草机构在结合传统旋耕式除草机所具有的优点下,进一步采用了深耕式的割草装置,可以有效的对杂草根部进行割除,有效的提高了杂草的清除率;株间伸缩割草装置采用丝杆传动,实现了割草装置的左右伸缩,进而实现了株间精准除草。
现如今的果园维护,果园内通过种植草类植物来使得果园内的环境更加的丰富,另外这类草类植物可以巩固泥沙,防止水土流失,但是为了避免草类植物生长过高,营养匮乏,通过割草设备去除植物的顶端优势,现有的割草设备割草后依旧需要设备或人工进行喷洒药水或洒水来加大维护,二次作业成本较高,现有的割草设备未能独立完成割草和喷洒作物的功能。
针对上述问题,为此,提出一种可适应多种地形的智能果园割草机器人。
发明内容
本发明的目的在于提供一种可适应多种地形的智能果园割草机器人,解决了背景技术中设备功能的单一性不能完成割草和喷洒两种工作的问题。
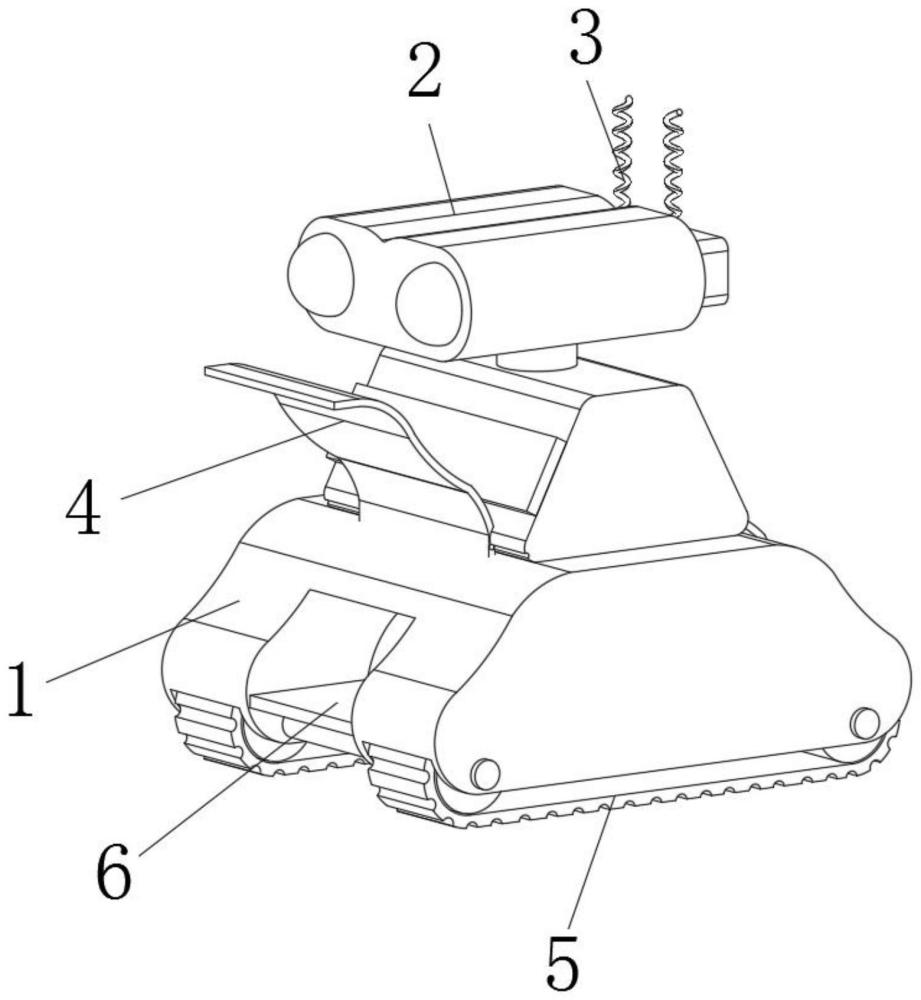
为实现上述目的,本发明提供如下技术方案:一种可适应多种地形的智能果园割草机器人,包括机仓,所述机仓的底端安装有履带,所述机仓的顶端连接有监测组件,所述监测组件的一侧连接有接收天线,所述监测组件和接收天线之间电性连接,所述机仓的内部嵌入有架设平台,所述架设平台的上端连接有安装固定架,所述安装固定架的顶端连接有切割辊,所述切割辊的上端安装有切割刀,所述架设平台的顶端连接有隔离罩;
所述切割辊的一侧连接有衔接盘,所述衔接盘的内部嵌入有输水管,所述输水管的顶端嵌入到切割辊的内部,所述切割辊的内部开设有内空腔,所述内空腔的内部固定连接有分流盘,所述分流盘的上端固定连接有分流条,所述内空腔的内壁上开设有贯穿切割辊的喷洒孔。
优选的,所述机仓的上端通过转动轴连接有两组检修门,两组所述检修门覆盖在架设平台的左右两端。
优选的,所述安装固定架的一侧固定连接有一组电机,电机的输出端嵌入在切割辊的中心轴上,所述切割辊的一侧和电机输出端相连接,另外一侧和衔接盘相连接。
优选的,所述隔离罩设置为弧形,所述隔离罩覆盖在切割辊和切割刀的上端。
优选的,所述衔接盘的上端固定连接有嵌环,所述衔接盘的上端套接有密封圈,所述衔接盘的上端开设有定位槽,所述衔接盘的表面连接有密封贴,所述衔接盘嵌入到切割辊的内部,所述嵌环嵌入在定位槽的内部,所述衔接盘和切割辊之间通过嵌环和定位槽转动连接。
优选的,所述衔接盘的内部开设有穿插孔,所述输水管嵌入在穿插孔的内部,所述输水管贯穿穿插孔嵌入到内空腔的内部。
优选的,所述输水管的正前方对应分流盘,所述输水管和分流盘保持同一高度,所述分流盘上端均匀等距连接有分流条。
优选的,每组所述分流条的内侧皆开设有一组凹槽,所述分流条上端开设凹槽的位置对应了喷洒孔的位置,所述分流条的纵切面和的喷洒孔保持同一平面。
优选的,所述密封圈嵌入在切割辊的内部,所述密封圈设置为环状结构,且靠近切割辊的一侧面上附着有润滑油。
优选的,所述喷洒孔均匀等距环绕在切割辊的内部,所述喷洒孔为弧形凹槽。
与现有技术相比,本发明的有益效果如下:
本发明提供的一种可适应多种地形的智能果园割草机器人,采用了履带作为行走机构可以加大该装置的通用性,使得可以适用于多种地形,加大了设备的通过性,另外在切割辊和切割刀的作用下完成对草类植物的切割,切割期间可通过喷洒孔对草类植物进行浇灌,一次性的完成了切割和浇灌两种工序,其中浇灌不仅能为草类植物提供了良好的生存环境,还能防止切割产生的灰尘飞扬,通过打湿泥土减少扬尘。
附图说明
图1为本发明的整体结构示意图;
图2为本发明的立体结构示意图;
图3为本发明履带和隔离罩的结构示意图;
图4为本发明切割辊和切割刀的结构示意图;
图5为本发明衔接盘和喷洒孔的结构示意图;
图6为本发明的穿插孔和定位槽分解结构示意图;
图7为本发明切割辊的剖面结构示意图。
图中:1、机仓;2、监测组件;3、接收天线;4、检修门;5、履带;6、架设平台;7、切割辊;8、切割刀;9、安装固定架;10、隔离罩;11、衔接盘;12、输水管;13、喷洒孔;14、穿插孔;15、定位槽;16、密封贴;17、分流盘;18、分流条;19、嵌环;20、密封圈;21、内空腔。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为进一步了解本发明的内容,结合附图对本发明作详细描述。
结合图1-图7,本发明的一种可适应多种地形的智能果园割草机器人,包括机仓1,机仓1的上端连接有监测组件2,监测组件2的内部安装有摄像头,摄像头作为画面采集的重要部件之一,可以将果园内的环境进行监测,监测结果通过监测组件2顶端的接收天线3将画面传输到终端上,画面输送到终端,工作人员可远程操作设备进自主的工作,机仓1的左右两侧各开设有检修门4,机仓1的内部连接有架设平台6,检修门4覆盖在架设平台6的左右两端,经过了检修门4的遮盖加大对架设平台6的保护,其中机仓1的底端连接有履带5,通过履带5可以适用于不同的地形,加大了机仓1的通过性。
架设平台6的上端安装有安装固定架9,安装固定架9的顶端连接有切割辊7,切割辊7的外边缘环绕有切割刀8,架设平台6的上端位于切割辊7和切割刀8的上端连接有隔离罩10,隔离罩10包裹在切割辊7和切割刀8的上端,圆弧的设计可以更加贴合切割刀8,当切割辊7和切割刀8进行转动时,切割的草碎能通过隔离罩10的阻挡,继续向上飞溅,飞溅的草碎撞击到隔离罩10的上端,在进行自由落地时,可再次撞击到切割辊7和切割刀8的上端,当切割辊7和切割刀8进行高速转动时,转动的切割刀8将草碎进行二次粉碎,经过二次粉碎的草渣更好的进行的分解,分解产生的肥料能够再次的利用到果园,使得果园内的土地更加的肥沃。
当电动机和切割辊7相连接时,切割辊7进行转动,为了避免衔接盘11跟着切割辊7进行同步转动,其中切割辊7和衔接盘11采用了活动连接的方式来完成,其中衔接盘11的背面一侧固定连接有嵌环19,且嵌环19设为环状,其中嵌环19和切割辊7上端开设的定位槽15匹配,当嵌环19嵌入到定位槽15的内部时,二者转动连接,另外在密封圈20填充在衔接盘11和定位槽15之间,另外配合了密封贴16贴合在衔接盘11的一侧,加大衔接盘11和切割辊7之间的连接,其中衔接盘11的内部开设的穿插孔14,其内部连接有输水管12,通过输水管12和液体容器相连接,通过将液体溶液输送到输水管12的内部,后通过输水管12输送到切割辊7的内部,切割辊7的内部开设有内空腔21,内空腔21的设计储存的部分液体,液体进入到内空腔21的内部,通过输水管12输送到切割辊7的内部的液体,液体通过管路会冲击到分流盘17的上端,其中分流盘17固定连接在切割辊7的内部,而分流盘17也对应了输水管12的位置,使得输水管12内部出来的水直接冲击到分流盘17的上端,切割辊7的转动带动了分流盘17进行转动,当分流盘17开始转动后,冲击到分流盘17上端的水流经过了分流条18进行导流,导流后将液体四散开,四散来的水流通过喷洒孔13喷洒出去,其中喷洒孔13为弧形凹槽,弧形的设计可减缓喷洒出去的速度,则内空腔21的内部开设的喷洒孔13则可以将液体输送出去,通过切割辊7的转动内空腔21内部储存的液体受到了离心力的影响向外扩散,液体可通过喷洒孔13洒落到切割辊7的外部,这时通过切割刀8对草进行分割,分割后内部的液体导出,导出的液体浇灌到草类植物上,完成果园的浇灌和切割,该割草机器人一次经过可以完成两种工序,功能也更加的多样化,提高了工作的效率。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种适应多种地形使用的电动车充电桩
- 一种适应复杂地形的移动机器人底盘
- 一种适应多种地形的工业机器人行走机构
- 一种适应多种地形的树干涂白机器人