一种半导体离子注入机的智能化作业的系统和方法
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及半导体器件加工技术领域,具体涉及一种半导体离子注入机的智能化作业系统和方法。
背景技术
半导体芯片离子注入机的注入工艺直接关系到芯片的最终性能,属于半导体最核心的主设备之一,但受限于离子注入机的作业方式,它只能单片作业,效率较低,单台价格又十分昂贵,严重制约半导体芯片的产能。
在离子注入机作业前,需要对离子注入机离子源部分进行暖机,并提前开启并加至作业时的束流,以确保离子源工作在稳定束流的状态,保证作业的均匀性,设备暖机过程一般需要1-2小时,暖机后才能开始注入作业。操作人员到岗后的第一时间就需要立即开启离子源进行暖机,最大程度的保证一天内离子注入机的有效工作时长足够长。
离子注入机在注入作业时,会伴随着高能量辐射危害,经常需要厚厚的屏蔽墙体进行屏蔽,操作人员在作业时,需要在注入机的显示屏幕上进行束流开启、晶圆ID和对应加工程序的选取、参数的调整、异常处置、束流关闭等操作,不可避免的长时间接触离子注入机设备,引发职业健康的困扰。同时在离子注入作业时,往往需要将不同晶圆执行不同的程序,如果注入能量跨度大,注入机可能会因为能量突然大跨度调整导致束流异常等错误,造成注入中断。此时需要操作人员在过程中及时关注作业进度,及时在上一批次作业完成后,手动缓慢分梯度调整注入能量,然后待束流稳定后,将不同的晶圆和程序进行再次作业。如果过程中遇到束流不稳定时,会出现报警,需要手动关闭报警界面,将束流重新开启再重新执行作业程序。这些过程往往都需要人工干预。
在离子注入机作业完成时,需要将离子源进行关闭,以延长离子源的寿命。离子源对离子注入机来讲是“心脏”类的功能,其作用不言而喻,一旦离子源寿命缩短或损坏,耗材、人工、维护等一系列流程走下来,非常耗财耗时。因此在作业完成后第一时间,需要手动将离子源关闭,最大限度的延长其寿命。
发明内容
针对现有技术的离子注入机的近距离高能量辐射危害、以及针对离子注入机作业前、中、后的人工干预过程的技术问题,为克服现有技术不足,本发明提供一种半导体离子注入机的智能化作业系统和方法,具体的,是一种基于RPA流程自动化模块的半导体芯片在离子注入过程中的智能化作业系统和方法。
本发明采用了如下的技术方案:
本发明涉及一种半导体离子注入机的智能化作业系统,所述系统包括:半导体离子注入机、KVM切换器、搭载RPA流程自动化模块的远程操控服务器,KVM:键盘视频鼠标,RPA:机器人流程自动化;
所述离子注入机用于对半导体工艺进行离子注入;
所述KVM切换器用于把离子注入机切换到远程操控端服务器,离子注入机和远程操控服务器进行通讯,远程操控服务器通过KVM切换器控制离子注入机的远程界面;
所述RPA流程自动化模块搭载到远程操控服务器,包括OCR文字识别单元、流程编辑单元、CV视觉处理单元、Dashboard单元:所述OCR文字识别单元是用字符识别方法将形状翻译成计算机文字的单元模块;流程编辑单元是将流程中各个步骤进行设置、编辑和逻辑串联的单元模块,实现对各个步骤的衔接和逻辑的判定;CV视觉处理单元是利用图像识别模型与同步检测到的图像进行比对,方便计算机识别并做出判断;Dashboard单元用于将RPA流程各个界面进行集中展示和管理。
进一步的,所述半导体离子注入机是大束流离子注入机、或中低束流离子注入机、或高能离子注入机。
进一步的,所述RPA流程自动化模块根据远程操控服务器时间变化,定时开启离子注入机暖机流程。
进一步的,所述RPA流程自动化模块用于根据设定,执行工程师设定束流调整以及不同的作业程序,RPA流程自动化模块还用于监控晶圆位置变化和单片晶圆的作业进度条。
进一步的,所述RPA流程自动化模块在不同晶圆变更程序作业时,注入机设备自动停止运行,RPA流程自动化模块在界面特定坐标下触发选择程序的窗口,在弹出的窗口下根据坐标位置选择需要执行的稳定束流程序,在一定时间内没有检测到新的报错时,RPA流程自动化模块根据坐标位置开启继续作业。
进一步的,所述RPA流程自动化模块在遇到报错时,识别报警窗口,同时确认报警信息内容,与设定报错内容相符时,自动重置报错,重新开启作业;与设定报错内容不相符时,自动全屏截取画面,开启邮件发送功能,将报错信息发送至指定联系人。
进一步的,所述RPA流程自动化模块作业完成时,自动打开离子源控制界面,关闭离子源电压。
进一步的,所述RPA流程自动化模块在次日定时自动开启离子注入机暖机程序,并结束RPA流程自动化模块,等待处理新产品流程。
本发明还涉及一种半导体离子注入机的智能化作业方法,包括如下步骤:步骤S100,为远程操控服务器或电脑搭载RPA流程自动化模块,在设定时间开启RPA流程自动化模块的暖机程序;
步骤S200,在远程操控端通过网络和KVM切换器远程同步操控离子注入机运行,优化调整作业参数;
步骤S300,当作业参数设定好后,设定RPA流程自动化模块执行自动批量运行不同的菜单;
步骤S400,当作业参数注入能量过小或注入能量过大时,会出现报错,RPA流程自动化模块的视觉处理单元判断设备状态,OCR单元识别错误类型并进行判定;
步骤S500,若RPA流程自动化模块识别出错误,将报错信息截图或把报错消息的文字内容发出,提醒报错发生;
步骤S600,当作业完成时,RPA根据识别晶圆位置状态和进度条状态,判断整体作业进度,如果进度条状态为100%,RPA流程自动化模块触发关闭离子源模块。
进一步的,步骤S300中,当不同晶圆上选取的注入能量参数跨度大时,观察晶圆位置变化和屏幕进度条情况,当作业完指定的晶圆后,RPA流程编辑模块继续执行不同程序的剩余晶圆,RPA流程自动化模块根据晶圆的颜色变化,来判断作业进度。
与现有技术相比,本发明的技术方案能够实现如下有益的技术效果:
本发明解决了离子注入机靠人工近距离暖机、调参数、消报警、关机等手动作业的问题,大幅降低了人工工作的强度和时长,极大的降低了作业时的辐射风险,提升半导体离子注入机的作业效率。
本发明利用KVM切换器、网络、以及远程操控系统,实现远程操控系统端同步显示离子注入机的操作界面窗口,键盘鼠标同步操作离子注入机,避免近距离接触;
本发明在远程操控系统端搭配RPA流程自动化模块,可代替人工干预,定时开启离子源暖机,对不同晶圆对应不同程序选择,尤其是注入能量有较大跨度时,可自动监控作业进度情况,完成时自动分梯度调整注入能量稳定束流,开启不同条件的作业,对常规发生的束流报错,自动关闭并重新加载程序运行,提升作业效率;作业完成后,自动关闭离子源,延长离子源寿命,降低人员依赖。
附图说明
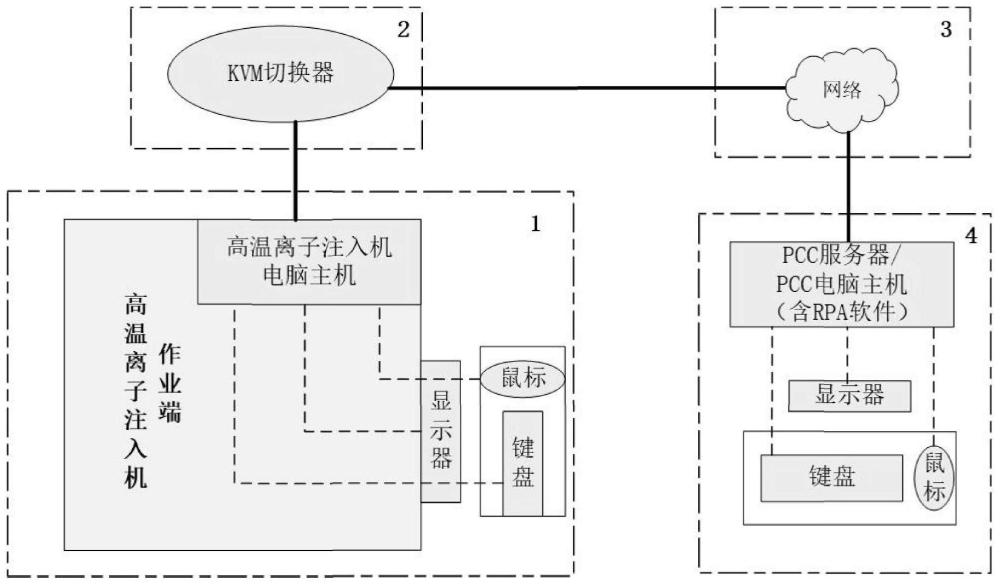
图1为本发明的半导体离子注入机的智能化作业系统;
图2为本发明的半导体离子注入机的智能化作业方法流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
下面结合附图及具体实施例对本发明进行详细说明。
本发明的第一方面提供了一种半导体离子注入机的智能化作业系统,所述系统包括:半导体离子注入机、KVM切换器、搭载RPA流程自动化模块的远程操控服务器或电脑主机。其中,离子注入机能够对半导体工艺进行离子注入,可被单独操作运行作业,KVM切换器是把离子注入机的键盘、视频、鼠标切换到远程操控端服务器或电脑的装置,通过网络通讯将离子注入机和远程操控端的服务器或电脑串联起来,远程操控服务器或电脑可以通过KVM切换器控制离子注入机的远程界面;RPA流程自动化模块是搭载到远程操控端服务器或电脑的软件,包括OCR文字识别单元、流程编辑单元、CV视觉处理单元、Dashboard单元。
所述OCR文字识别单元是用字符识别方法将形状翻译成计算机文字的单元模块,内置各种字符类的图形与对应的计算机文字转换对应模型。
流程编辑单元是将流程中各个步骤进行设置、编辑和逻辑串联的单元模块,实现对各个步骤的衔接和逻辑的判定。
CV视觉处理单元是利用图像识别模型与同步检测到的图像进行比对,方便计算机识别并做出判断。
Dashboard单元是可以将RPA流程各个界面进行集中展示和管理的单元。
所述半导体离子注入机可以是大束流离子注入机、或中低束流离子注入机、或高能离子注入机。
所述KVM切换器可以是基于IP的KVM或非基于IP的KVM。
应用局域有线网络或无线网络。优选的,远程端网络搭建为光纤连接,可保证远程端操控低延迟。
PCC远程端可以是服务器或电脑。优选的,服务器作为保障RPA流程自动化模块运行的载体。
RPA流程自动化模块不限于安装在远程端服务器上,也可以安装在离子注入机上。优选的,安装在服务器上,以避免影响离子注入机本身运行或RPA流程自动化模块与离子注入机系统不兼容。
半导体高温离子注入机通过部署KVM切换器模块、网络、以及同网络下远程端电脑,将高温离子注入机的视频信号、鼠标信号、键盘信号同步到远程端,远程端电脑通过信号切换,可显示高温离子注入机的操作界面,同时远程端的鼠标、键盘控制信号通过网络传递到高温离子注入机电脑上,实现远程同步操控。远程端电脑设置RPA流程自动化模块,提前根据判断条件编辑逻辑动作,可实现自动化定制化的功能。
RPA流程自动化模块根据监控服务器时间变化,定时开启离子注入机暖机流程。
RPA流程自动化模块可以根据工程师设定,执行工程师设定的作业程序,RPA流程自动化模块监控晶圆位置变化和单片晶圆的作业进度条,掌握产品作业进度。
RPA流程自动化模块在不同晶圆变更程序作业时,尤其是注入能量跨度大时,自动停下,去分梯度自动调整注入能量稳定束流,无报错后自动选取对应的作业程序,重新运行。
RPA流程自动化模块在遇到报错时,可识别报警“Error”窗口,同时确认报警信息内容。与设定报错内容相符时,自动重置报错,重新开启作业。
RPA流程自动化模块在遇到报错时,可识别报警“Error”窗口,同时确认报警信息内容。
与设定报错内容不相符时,自动全屏截取画面,开启邮件发送功能,将报错信息发送至指定联系人。
RPA流程自动化模块作业完成时,自动打开离子源控制界面,关闭离子源电压等。
RPA流程自动化模块在次日定时自动开启离子注入机暖机程序,并结束RPA流程自动化模块,等待工程师处理新产品流程。
在本发明的一个具体实施例中,远程端电脑RPA流程自动化模块早上7点自动开启高温离子注入机的暖机工序,操作员8点半上班后进入洁净间将待作业的产品放置到设备内。
工程师在远程端电脑的RPA流程自动化模块内将对应的程序与晶圆编辑匹配,并试跑确认无报警后,开启RPA流程自动化模块正式执行作业程序。
RPA流程自动化模块根据设定,批量执行作业,根据晶圆的位置变更信息判断晶圆的整体作业进度,通过识别单片晶圆的作业进度条,掌握产品的详细的作业进度。到设定晶圆的位置后,自动分梯度增加注入能量稳定束流,再自动变更作业程序,并继续运行。
RPA流程自动化模块遇到报错时,通过识别报警窗口,读取报错信息,如果与设定的报错信息一致,可重置报错并重新开启,继续作业。如果与设定的报错信息不符,将报错信息全屏截图,并发邮件通知到责任工程师,便于提醒工程师及时处理。
作业完成后,根据产品作业安排,RPA按照设定可自动关闭离子源。
RPA流程自动化模块自动在设定时间开启高温离子注入机暖机工序,等待工作人员将新程序和新产品重新设定。
本发明的第二方面提供了一种半导体离子注入机的智能化作业方法,包括如下步骤:
步骤S100,远程操控服务器或电脑搭载RPA流程自动化模块,RPA流程自动化模块可设定,在设定时间开启暖机程序。当有作业任务排产时,提前设定在工作时间前2小时自动开启离子源,以稳定束流,无须人员提前到场,延长可作业时间。
步骤S200,作业时,作业人员在远程操控端通过网络和KVM切换器远程同步操控离子注入机运行,优化调整作业参数,避免人员近距离接触带来的辐射风险。
步骤S300,当作业参数固定好后,设定RPA流程自动化模块执行自动批量运行不同的菜单。当不同晶圆上选取的注入能量参数跨度大时,常规需要人工看守至同程序作业完成后,再手动分梯度加载不同能量的作业程序,稳定束流,无报错后选取另外条件的程序继续作业,过程中需要人员时刻跟进作业进度,作业完成后再执行不同条件作业。而RPA流程自动化模块可以根据CV视觉处理模块,观察晶圆位置变化和屏幕进度条情况,当作业完指定的晶圆后,RPA流程编辑模块可换程序继续执行不同程序的剩余晶圆。如有多个程序对应多个晶圆,RPA可依此法执行作业。而RPA流程自动化模块可以根据晶圆的颜色变化,来判断作业进度。其中作业中晶圆共有四个颜色状态,灰色代表未作业数,绿色代表正在作业中,墨绿色代表即将作业,蓝色代表作业完成数。当N片晶圆以程序1作业完成时,RPA流程自动化模块监控1-N的晶圆颜色显示为蓝色,作业进度条显示100%。如果在第N+1片启动的作业程序2的注入能量与程序1的注入能量跨度大(一般超过30keV),RPA流程自动化模块自动去指定界面,加载设定好的程序,分梯度缓慢加至需要的作业能量,如果在此过程中CV视觉处理模块没有识别到报错,RPA自动化模块触发Job界面,自动勾选待作业的N+1号和其它同条件作业晶圆,自动加载作业2程序,触发“Start”开始继续作业。
步骤S400,当作业参数注入能量过小或注入能量过大时,因濒临设备能力极限,束流经常遇到不稳定现象,会出现报错。此时,屏幕上右上角“Error”窗口指示灯变红,Error窗口变红并闪烁,同时进度条停止不动,常规是手动消除报警,点击“Error”窗口,弹出具体报错界面,点击“Error Reset”,然后关闭“Error”窗口,重新点击右下角的“Start”,继续作业。RPA流程自动化模块可自动判断设备状态,判断依据:当出现报错时,RPA流程自动化模块检查“Error”处边上的指示灯是否变红,再去验证“Error”窗口是否变红,再去核实注入工艺的进度条是否在15s内没有更新,如果上述判定均与报错的内置提示一致,确认为报错并触发自动处理。RPA流程自动化模块自动点击“Error”窗口,内置的OCR模块根据“Error”弹出的窗口中最近时间的红色报错文字,识别错误类型,与预设的报错文字对比,如果与预设报错一致,判定为“束流不稳定报错”,RPA根据坐标位置在“Error”窗口内触发点击“Error Reset”,再关闭“Error”窗口,再去指定坐标位置触发点击“Start”。完成报警自动消除,提高作业效率。
步骤S500,如果是其它错误类型,RPA识别出错误,将报错信息截图或把报错消息的文字内容发给同网络下的负责人,提醒报错发生,以便及时处理。
步骤S600,当作业完成时,RPA根据识别晶圆位置状态和进度条状态,判断整体作业进度,如果进度条状态为100%,晶圆位置已经显示在最后一片,则表明作业已经结束,RPA流程自动化模块触发“Power Supply”界面,并触发关闭离子源模块。
步骤S700,并在次日自动进行暖机动作。等待工作人员上班后,将作业完的晶圆取下,将待作业完的晶圆换上,待工作人员将晶圆以及对应的程序一一对应后,RPA自动执行新一批的作业流程。
综上所述,本发明的RPA流程自动化模块远程操控离子注入机在设定的任意时间自动开启暖机进行稳定束流,注入作业时批量化执行不同程序的注入工艺,针对报错信息自动修正处理,注入作业完成后自动执行关闭离子源的操作,可大幅降低人工工作强度和时长,避免注入作业时的辐射风险,提升作业效率。
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
- 一种空地一体输电输电线路智能化机巡作业系统及方法
- 一种半导体外壳焊接方法及半导体外壳定位装架方法
- 一种基于高功率半导体激光器的激光熔覆方法及系统
- 一种半导体激光器测试系统及方法
- 一种集装箱盒装货物智能化卸货消杀码垛作业线视觉引导控制系统及方法
- 一种场地作业人员安全智能化管理系统及方法