一种超低轨微小型卫星平台电子控制组件
文献发布时间:2024-01-17 01:14:25
技术领域
本发明属于卫星平台电子系统技术领域,尤其涉及一种超低轨微小型卫星平台电子控制组件。
背景技术
超低轨轨道一般低于300km。由于轨道低,在携带同样载荷情况下,可以获得更高的分辨率和观测精度,综合成像能力大幅提升。另一方面,相比传统遥感卫星,要达到同样的观测精度,超低轨微小卫星载荷的体积和功耗可大为降低。这使得超低轨微小型卫星具有成本低、体积小、重量轻、响应快、在轨机动灵活等特点,获得了国内外众多航天机构的青睐。
超低轨微小卫星星体空间狭小,为满足任务多样性,携带更多任务载荷,对平台电子系统的体积、重量等提出了较高的要求。此外,为适应超低轨的空气阻力环境,减小空气阻力对飞行姿态、轨道控制的影响,一些超低轨微小卫星还会进行气动外形设计。这更加剧了对平台电子设备体积和重量的限制程度。
传统卫星平台电子系统一般包括数管计算机、姿轨控分系统、测控分系统、推进分系统、热控分系统等的相关单机设备。设备间通过串行总线进行信息交互,如1553B、CAN、RS422等。设备数量相对较多,整星成本相对较高,系统研制周期长;电缆数量多,占用空间大,不利于整星减重;设备间电缆连接关系复杂,不便于整星测试,也给系统可靠性带来隐患;整个系统的软硬件状态多,不利于系统功能性优化与功能扩展,也不利于批产和快速响应。
发明内容
本发明解决的技术问题是:克服现有技术的不足,提供了一种超低轨微小型卫星平台电子控制组件,具有体积小、重量轻,适合超低轨微小型卫星狭小空间,满足后续相关任务需求。
本发明目的通过以下技术方案予以实现:一种超低轨微小型卫星平台电子控制组件,包括:星载处理与控制模块、电源管理模块和测控模块;其中,所述测控模块:用于接收上行的射频信号,对上行的射频信号进行解调和指令译码得到直接指令;接收间接指令和遥控数据并转发至所述星载处理与控制模块;从所述星载处理与控制模块获取下行数据,对下行数据进行遥测帧组帧,调制成射频信号并输出;接收导航信号,对导航信号进行模数转换和电文解算处理后得到导航定位数据,将导航定位数据发送给所述星载处理与控制模块;所述电源管理模块:用于将一次电源转换为星载处理与控制模块和测控模块所需的二次电源;对蓄电池组进行均衡控制;接收星载处理与控制模块发送的配电指令,根据配电指令控制星载处理与控制模块的配电开关通断;所述星载处理与控制模块:用于接收间接指令和遥控数据并进行分发与执行;生成及维护星上时间;采集星上数据,对星上数据中的所需数据进行保存;采集姿控敏感器的敏感数据,根据工作模式和预定算法形成控制操作序列,驱动执行机构对卫星姿态进行调整;采集星上设备和星体结构的温度信息,按照温度控制规则控制加热器的闭环和开环控制。
上述超低轨微小型卫星平台电子控制组件中,所述测控模块包括X频段测控模块和GNSS模块;其中,所述X频段测控模块:从测控接收天线接收到上行的射频信号,对上行的射频信号进行解扩和解调,提取码位同步信号,识别方式字,根据方式字得到直接指令;接收间接指令和遥控数据并转发至所述星载处理与控制模块;从所述星载处理与控制模块获取下行数据,对下行数据进行遥测帧组帧,调制成射频信号并输出;所述GNSS模块:接收导航信号,对导航信号进行模数转换和电文解算处理后得到导航定位数据,将导航定位数据发送给所述星载处理与控制模块。
上述超低轨微小型卫星平台电子控制组件中,所述电源管理模块包括:一次电源变换模块、二次配电模块和蓄电池管理模块;其中,所述一次电源变换模块:用于将一次电源转换为星载处理与控制模块和测控模块所需的二次电源,将二次电源传输给所述二次配电模块;所述蓄电池管理模块:用于对蓄电池组进行均衡控制;所述二次配电模块:接收星载处理与控制模块发送的配电指令,根据配电指令控制星载处理与控制模块的配电开关通断。
上述超低轨微小型卫星平台电子控制组件中,对蓄电池组进行均衡控制包括:采集单体电池的电压数据,得到单体电池间压差;若单体电池间压差不低于均衡起始条件电压50mV时,电压较高的一节单体执行均衡通操作;当单体电池间压差小于均衡停止电压20mV时,停止该节单体电池均衡。
上述超低轨微小型卫星平台电子控制组件中,根据配电指令控制星载处理与控制模块的配电开关通断包括:根据配电指令控制星载处理和控制模块的主份配电开关和备份配电开关的通断,形成主开备关或者主关备开。
上述超低轨微小型卫星平台电子控制组件中,所述星载处理与控制模块包括核心处理模块、星务模块和接口控制模块;其中,所述核心处理模块:用于接收间接指令和遥控数据并进行分发与执行;生成及维护星上时间;采集星上数据,对星上数据中的所需数据进行保存;接收星上设备和星体结构的温度信息,按照温度控制规则控制加热器的闭环和开环控制;所述星务模块:用于采集姿控敏感器的敏感数据,根据工作模式和预定算法形成控制操作序列,驱动执行机构对卫星姿态进行调整;所述接口控制模块:用于采集星上设备和星体结构的温度信息,将星上设备和星体结构的温度信息传输给所述核心处理模块。
上述超低轨微小型卫星平台电子控制组件中,采集星上数据,对星上数据中的所需数据进行保存包括:所述核心处理模块每分钟抽取整星重要遥测参数组成延时遥测包,存储在核心处理模块的数据存储区,在过测控弧段时通过X测控部分下传至地面。
上述超低轨微小型卫星平台电子控制组件中,所述接口控制模块通过系统总线与核心处理模块通信,所述接口控制模块通过OC输出通道和OC接收通道形成控制指令传输通道,通过加热器驱动控制加热器的打开或关闭。
上述超低轨微小型卫星平台电子控制组件中,所述接口控制模块包括CAN通道、RS422通道、LVDS通道、OC输出通道、OC接收通道、模拟量采集通道、测温通道和加热器驱动通道。
上述超低轨微小型卫星平台电子控制组件中,姿控敏感器包括星敏感器、太阳敏感器、磁强计和陀螺。
本发明与现有技术相比具有如下有益效果:
(1)本发明功能密度高,综合了数管、星务、配电、测控、推进控制、热控等常规设备的功能,体积小,重量轻,适合超低轨微小型卫星狭小空间,满足相关任务需求;
(2)本发明平台电子控制组件对外接口少,整个电子系统的电缆数量少;
(3)本发明电子控制组件实现模块化、接口标准化,可根据任务进行功能扩展,也有利于功能模块独立升级,从而满足超低轨微小型卫星任务多样性的特点,以及适应批产的要求。
附图说明
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
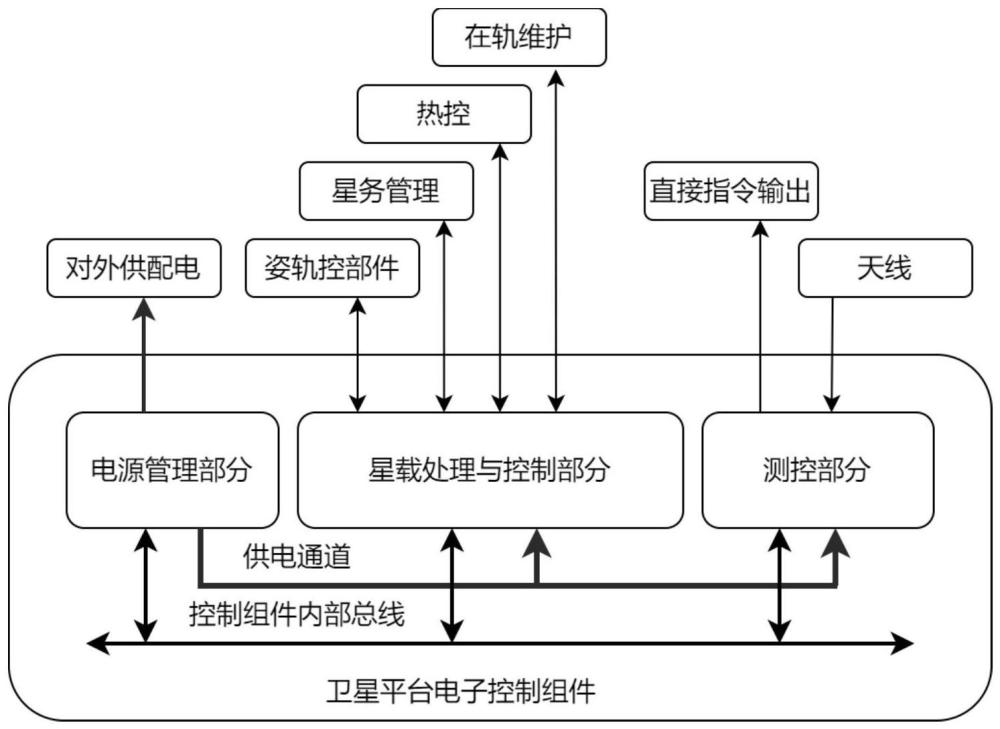
图1是本发明实施例提供的超低轨微小型卫星平台电子控制组件的结构框图;
图2是本发明实施例提供的测控模块组成示意图;
图3是本发明实施例提供的电源管理模块组成示意图;
图4是本发明实施例提供的星载处理与控制模块组成示意图;
图5是本发明实施例提供的测控模块、电源管理模块和星载处理与控制模块三个功能模块堆叠结构示意图。
具体实施方式
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
图1是本发明实施例提供的超低轨微小型卫星平台电子控制组件的结构框图。如图1所示,该超低轨微小型卫星平台电子控制组件包括:星载处理与控制模块、电源管理模块和测控模块;其中,
所述测控模块:用于接收上行的射频信号,对上行的射频信号进行解调和指令译码得到直接指令;接收间接指令和遥控数据并转发至所述星载处理与控制模块;从所述星载处理与控制模块获取下行数据,对下行数据进行遥测帧组帧,调制成射频信号并输出;接收导航信号,对导航信号进行模数转换和电文解算处理后得到导航定位数据,将导航定位数据发送给所述星载处理与控制模块;
所述电源管理模块:用于将一次电源转换为星载处理与控制模块和测控模块所需的二次电源;对蓄电池组进行均衡控制;接收星载处理与控制模块发送的配电指令,根据配电指令控制星载处理与控制模块的配电开关通断;
所述星载处理与控制模块:用于接收间接指令和遥控数据并进行分发与执行;生成及维护星上时间;采集星上数据,对星上数据中的所需数据进行保存;采集姿控敏感器的敏感数据,根据工作模式和预定算法形成控制操作序列,驱动执行机构对卫星姿态进行调整;采集星上设备和星体结构的温度信息,按照温度控制规则控制加热器的闭环和开环控制。
测控模块主要功能包括:(1)完成上行射频信号解调,指令译码,直接指令输出,间接指令和遥控数据转发;(2)完成下行数据组帧,调制成射频信号并输出;(3)采集自身遥测,作为下行数据的一部分,并管理前述两项功能。
电源管理模块主要功能包括:(1)一次电源对蓄电池组进行均衡控制;(2)将一次电源转换为设备、器件所需的二次电源;(3)为其它设备提供供配电功能;(4)接收指令,控制自身运行,采集相关遥测,通过内部总线传输至星载处理部分。
星载处理与控制模块主要功能包括:(1)星务管理:接收遥控指令并进行分发与执行;对星上任务进行调度和管理;生成及维护星上时间;采集星上数据,重要数据进行保存,遥测数据打包发送给数传;(2)姿轨控:姿轨控传感器数据采集与控制,执行机构数据采集与控制,推进部件控制;(3)热控管理:采集星上设备和星体结构的温度信息,按照温度控制规则控制加热器的闭环和开环控制;(4)在轨维护,完成数据和程序的上注、更新;(5)提供大容量存储及其管理。
如图2所示,测控模块包括X频段测控模块和GNSS模块;其中,
所述X频段测控模块:从测控接收天线接收到上行的射频信号,对上行的射频信号进行解扩和解调,提取码位同步信号,识别方式字,根据方式字得到直接指令;接收间接指令和遥控数据并转发至所述星载处理与控制模块;从所述星载处理与控制模块获取下行数据,对下行数据进行遥测帧组帧,调制成射频信号并输出;
所述GNSS模块:接收导航信号,对导航信号进行模数转换和电文解算处理后得到导航定位数据,将导航定位数据发送给所述星载处理与控制模块。
X频段测控模块从测控接收天线接收到上行的射频信号,完成对射频信号的解扩和解调,提取码位同步信号,对方式字进行识别,对数据进行校验;X频段测控模块根据方式字生成直接指令,并通过X频段测控模块的OC通道驱动输出到相应的设备,使之产生预期的动作,完成地面直接遥控功能;对间接指令及其它上注数据,X频段测控模块通过平台电子控制组件内部的总线进行转发,送至星载处理与控制部分处理。
X频段测控模块通过总线接口从星载处理与控制部分获取下行数据,对下行数据进行遥测帧组帧,然后调制成射频信号,通过测控发送天线输出。
GNSS模块从GNSS接收天线接收GPS、北斗的导航信号,在本模块内完成射频信号处理、模数转换、电文解算,并解析出实时导航定位数据,再通过平台电子控制组件的内部总线将数据送给星载处理与控制部分,为其它星上设备提供位置、速度和时间信息。
GNSS模块接收GPS信号,提取时间信息,再整秒向星载处理与控制部分输出秒脉冲信号。
如图3所示,电源管理模块包括:一次电源变换模块、二次配电模块和蓄电池管理模块;其中,所述一次电源变换模块:用于将一次电源转换为星载处理与控制模块和测控模块所需的二次电源,将二次电源传输给所述二次配电模块;所述蓄电池管理模块:用于对蓄电池组进行均衡控制;所述二次配电模块:接收星载处理与控制模块发送的配电指令,根据配电指令控制星载处理与控制模块的配电开关通断。
一次电源变换模块在一次母线配电输入端设置载荷配电总开关,将卫星太阳能帆板或蓄电池提供的28V一次母线电源转换成测控部分、星载处理与控制部分、其它设备等所需的二次电源,如:+12V、-12V、+5V、-5V、3.3V等。一次电源变换模块产生的二次电源通过内部通道接入二次电源配电管理模块。
一次电源变换模块提供一次电源配电,为电推进、高算力、数传、北斗模块等有效载荷提供一次母线配电。
蓄电池管理模块通过模拟采集电路采集单体电池的电压数据,经I2C总线传至下位机,由下位机传输至星载处理和控制部分。
蓄电池管理模块采用自动均衡管理策略。通过采集、比较和判断单体电池压差,若单体电池间压差不低于均衡起始条件电压50mV时,电压较高的一节单体执行均衡通操作;当单体电池间压差小于均衡停止电压20mV时,停止该节单体电池均衡。启动过放保护控制以及放电开关控制等。
二次电源配电模块包含二次配电和下位机,二次配电为星上其它部件提供多路供电输出,如+12V、-12V、+5V、-5V、3.3V等。每路配电采取单独的配电开关。
星载处理与控制部分通过内部总线发送配电指令到二次电源模块的下位机,下位机接收到指令后,形成对配电开关通断的控制,完成各部件配电电源的输出或断开。
二次电源配电模块通过OC通道接收测控部分发送过来的直接指令,控制星载处理和控制部分的主份和备份配电开关的通断,形成主开备关或者主关备开。或根据星载处理和控制部分仲裁电路发送的切机指令,控制星载处理和控制部分的主份和备份配电开关的通断。
二次电源配电模块下位机采集电源管理部分的内部状态信息,如配电开关通断状态、配电输出电压和电流等遥测参数,通过内部总线发给星载处理和控制部分。
如图4所示,星载处理与控制模块包括核心处理模块、星务模块和接口控制模块;其中,
所述核心处理模块:用于接收间接指令和遥控数据并进行分发与执行;生成及维护星上时间;采集星上数据,对星上数据中的所需数据进行保存;接收星上设备和星体结构的温度信息,按照温度控制规则控制加热器的闭环和开环控制;
所述星务模块:用于采集姿控敏感器的敏感数据,根据工作模式和预定算法形成控制操作序列,驱动执行机构对卫星姿态进行调整;
所述接口控制模块:用于采集星上设备和星体结构的温度信息,将星上设备和星体结构的温度信息传输给所述核心处理模块。
核心处理模块包括CPU及其最小系统。为星务软件提供运行环境和平台,完成卫星的星务管理、热控管理和健康管理等操作。
核心处理模块接收从测控部分发送过来的上注指令和上注数据,并转发给其它设备。
核心处理模块通过系统内部总线收集星上各设备的遥测参数,组帧后通过内部总线发给测控系统下传;核心处理模块提供数据存储功能,用于保存重要参数、重要的原始数据。核心处理模块每分钟抽取整星重要遥测参数组成延时遥测包,存储在核心处理模块的数据存储区,在过测控弧段时通过X测控部分下传至地面。
星务模块对星敏感器、太阳敏感器、磁强计、陀螺等姿控敏感器进行管理和控制,通过RS422采集姿控敏感器的敏感数据,根据工作模式、预定算法形成控制操作序列,驱动执行机构如推力器、动量轮、磁力矩器等,对卫星姿态进行调整,实现整星的姿态和轨道控制。
根据遥感成像任务,接收地面通过X测控部分传来的成像时间、目标点坐标、成像模式等信息,完成由成像准备到成像后状态恢复全过程的姿态路径规划与控制。
通过内部总线与核心处理模块进行数据交换,接收各种指令、上注数据、广播数据、状态数据、秒脉冲整秒信息数据,输出姿轨控遥测数据、姿轨控重要数据。
接口控制模块为与任务相关的各类对外接口,包括CAN、RS422、LVDS、OC输出、OC接收、模拟量采集通道、测温通道、加热器驱动通道等。接口控制模块通过系统总线与核心处理模块通信,受核心处理模块控制完成对各类总线接口的访问,配合核心处理模块完成对整星的控制。
通过CAN总线、RS422接口实现卫星平台电子控制组件内部各组成部分间、控制组件与外部设备间的数据通信,如遥测数据、间接指令等的传输。通过模拟量采集通道、测温通道测量部件和设备的状态数据、温度数据。通过OC输出通道和OC接收通道形成控制指令传输通道,通过加热器驱动控制加热器的打开或关闭,对特定设备进行加热或停止加热。
使用LVDS总线在星载处理与控制部分和载荷之间构成高速数据传输通道,使得载荷数据或在线处理,或将其重要部分存入存储器中。
由于与卫星任务相关,因此接口控制模块的类型和通道数量可能随着任务的不同而发生变化。接口模块间采用堆叠组合方式可以让硬件上接口类型和数量的扩展简便易行。
根据应用需求还可通过堆叠方式扩展带有高速对外接口的大容量存储模块,以满足高性能载荷高速、海量原始数据存储的需求。
如图5所示,星载处理与控制模块、电源管理模块、测控模块,这三个功能部分之间通过堆叠方式组合成一个整体-平台电子控制组件。通过平台电子控制组件内部系统总线互联,三个功能部分相互间的信息流和控制流交互通过内部总线进行传递。
平台电子控制组件的三个功能部分之间接口类型固定,接口数量较少。它们之间虽然存在供电关系(由电源管理系统提供),以及一定信息流、控制流的交互,但相互间软硬件耦合度低,功能上具有较好的隔离度。因而三个功能部分既可以集成在一处,作为一个独立的设备存在,从而节省卫星内部空间,减少电缆数量,也可以分散放置于不同区域,通过有限的电缆相连,从而满足超低轨卫星特殊构型或布局的需要。后一种形式虽然分置于不同区域,但三个功能部分仍然构成了一个完整的平台电子控制组件,达到“物理上分离,逻辑上统一”的效果。
由于软硬件耦合度相对较低,相互之间互联的接口类型固定,接口数量较少,三个部分可分别独立进行开发,分别独立进行调试测试,还可分别独立完成软硬件功能与性能的升级,易于形成标准化货架式系列产品。从而适应多任务类型、多载荷类型、快速响应,以及批量生产的需求。
X频段测控模块由测控A、测控B和天线网络组成。采用扩频体制,数据上注使用QPSK调制,A和B采用同构设计,接收热备,发射冷备,发射默认关机,通过指令控制开机。测控A和B都可以通过指令切换测控模式、数据上注,并具备数据上注模式下超时自动转入测控模式的功能。天线网络完成测控接收和射频信号分配功能,完成发生信号功率放大功能。
GNSS模块兼容GPS、北斗的导航信号。接收卫星定位信息,完成射频信号射频信号处理、模数转换、电文解算,解析出实时导航定位数据,通过平台电子控制组件内部总线送给星载处理与控制部分,为其它星上设备提供位置、速度和时间信息。在整秒通过RS422通道向星载处理与控制部分输出秒脉冲信号。
一次电源变换将卫星提供的28V一次电源转换成测控部分、星载处理与控制部分、一些其它设备等所需的二次电源,如如+12V、-12V、+5V、3.3V等。
蓄电池蓄电池电压范围:23.8V~29.4V;单体电池启动均衡电压:≥100mV;单体电池停止均衡电压:≤30mV;均衡电流:150mA~220mA。单组蓄电池放电开关主要由8个PMOS管串并联组成。当接收到蓄电池组放电指令时,可进行对蓄电池组放电。均衡管理采用被动型均衡电路,与耗散电阻连接的MOS管采用串联方式,避免三极管短路造成单体持续放电。星上设计20路加热器,为星上设备提供主动温度控制。测温通道包括16热敏电阻和两路不少于50个测温节点的Onewire总线。
二次电源配电管理为星上其它部件提供多路供电输出,包括6路+12V、4路-12V、10路+5V、4路-5V、4路3.3V等;通过OC通道接收直接指令或切机仲裁指令控制星载处理和控制部分的主备份加断电。采集电源管理部分的内部遥测,通过内部总线发给星载处理和控制部分。
星载处理与控制模块包含1个核心处理模块、1个姿轨控模块、2个接口模块、1个存储模块等5个模块。除存储外,提供双机备份。其中,
1个核心处理模块采用TMS570构建最小系统。具有不少于512KB的片内RAM,支持ECC;具有4MB带ECC的片内Flash,可满足超低轨嵌入式为星务软件需要,并可为核心处理提供一定的抗单粒子翻转能力。系统设计有16MB的MRAM,为重要数据提供存储空间。接收测控部分发送的上注指令和数据,并转发给其它设备。通过系统内部总线收集星上各设备的遥测参数,组帧后通过内部总线发给测控系统下传;提供存储功能,保存重要参数;完成卫星的星务管理、热控管理和健康管理等操作。
1个星务模块对星敏感器、太阳敏感器、动量轮、磁力矩、磁强计、陀螺等部件进行管理和控制,实现整星的姿态和轨道控制。
2个接口模块为与任务相关的各类对外接口,包括2路CAN、24路RS422、4路LVDS、32路OC输出/输入、96路模拟量采集通道、16个热敏电阻测温通道、50个Onewire测温节点、32个加热器驱动通道等,配合核心处理模块完成对整星的处理和控制。
1个存储模块提供128GB容量的存储空间,提供4路LVDS高速通过,供载荷数据存储使用。
每一个功能部分中的模块之间的结构通过螺钉与铜柱进行固定,电信号可参考PC-104或PC-104Plus等标准,通过针孔配合的接插件(针/孔间距2.54mm或2.0mm)进行传输,也可通过柔性电缆及其接插件进行信号传输。
三个功能部分间的连接方法与模块间连接类似,通过功能部分最边缘的模块之间的衔接实现。
整个平台电子控制组件外形尺寸约为205mm×240mm×125mm,重量约为4.2kg。同等功能性能情况下,体积、重量与功能密度方面优于常规设计。
本实施例通过多功能的综合,提高电子控制组件的功能密度高:超低轨微小型卫星平台电子控制组件综合了:电源控制(供电、电池均衡、二次供电、配电)、中心计算机(数管、姿轨控、控制、存储)、推进控制、测控(x测控,GNSS)等功能,可大幅减小系统体积,便于系统信息的融合与管理。
本实施例通过优化功能划分,三个功能部分相对独立,布置配置灵活,任务适应性强:可集中放置也可分散放置。当平台电子控制组件综合为一个机箱时,原来设备间的电缆转变为三个功能部分堆叠结构中接插件内的连线,系统电缆数量减少,有利于减轻整星重量及整星布线。当平台电子控制组件分散布置时,需增加一定电缆,但可适应超低轨卫星特殊构型或布局的需求。
本实施例通过优化组合,实现接口标准化,可扩展性好:模块统一外形尺寸和板间通信接口。三大功能部分软硬件耦合度低,各功能部分可独立进行设计、调试测试、软硬件升级改造。组件层面,可以根据任务需要,通过堆叠增加额外的功能部分。每一个功能部分也可根据应用需要,增补新的功能、提高系统性能,独立实现的软硬件升级。
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
- 一种微轨调度控制方法及系统
- 一种用于变轨装置的轨道支架组件
- 一种适用于接触轨受电的小型磁浮微轨电车
- 一种卫星平台电子的自动测试方法及其相关组件