一种用于惯性仪表的无源磁悬浮偏心磁干扰力矩补偿方法
文献发布时间:2024-01-17 01:14:25
技术领域
本发明属于惯性仪表技术领域,涉及一种无源磁悬浮偏心磁干扰力矩的补偿方法,尤其是一种用于惯性仪表的无源磁悬浮偏心磁干扰力矩补偿方法。
背景技术
在惯性仪表尤其是高精度三浮陀螺仪中,磁悬浮作为仪表输出轴定心装置,彻底消除了输出轴上的机械接触摩擦,从根源上抑制了仪表输出轴上的摩擦力矩,解决了仪表输出轴上的主要干扰力矩,使得仪表的噪声参数大幅优化,仪表精度也因此提升了一个量级以上。得益于此,高精度三浮陀螺仪成为当前航天用高精度陀螺仪的主流产品之一。
目前,磁悬浮的工作方式主要有两种:有源磁悬浮和无源磁悬浮,两者实现“仪表输出轴无机械摩擦”功能的前提下,又具有各自的特点。其中,有源磁悬浮具有拉中快速、拉中刚度大、稳态电磁力矩小的优点,但也具有闭环伺服控制固有的周期性扰动噪声问题,适用于机动性较高、噪声要求较低的工况;相比之下,无源磁悬浮拉中较慢、拉中刚度较小,但结构简单(可靠性更高),并且从原理上根除了有源闭环伺服控制带来的扰动噪声问题,更加适用于高可靠性、低机动性、低噪声、高精度要求的工况,因此成为航天用高精度三浮陀螺仪的首选。
无源磁悬浮的工程应用中,由于磁悬浮的拉力中心与仪表输出轴存在一定的偏差,导致产生绕输出轴的偏心磁干扰力矩,制约了所在仪表精度的进一步提升。
目前,常用的应对方法是通过提升磁路材质的一致性、提升零件加工装配的精度与对称性来降低磁悬浮拉力中心与仪表输出轴之间的偏差值,取得了一定效果,但付出了极高的材料、加工、装配成本,且磁干扰力矩的抑制潜力有限。上述状况已无法满足航天用高精度三浮陀螺仪技术与产品进一步发展的需求。
经检索,未发现与本发明相同或相似的已公开的专利文献。
发明内容
本发明的目的在于克服现有技术的不足,提出一种无源磁悬浮偏心磁干扰力矩的补偿方法,能够突破磁干扰力矩的技术难题。
本发明解决其现实问题是采取以下技术方案实现的:
一种用于惯性仪表的无源磁悬浮偏心磁干扰力矩补偿方法,包括以下步骤:
步骤1、测量初始磁干扰力矩;
步骤2、交叉调整X、Y轴两支路的电容,对步骤1的磁悬浮的磁干扰力矩进行补偿;
步骤3、测出调整后陀螺仪中磁悬浮的磁干扰力矩Mms2,如果Mms2<指定值,则补偿工作结束;否则,返回步骤2继续交叉调整X、Y轴两支路的电容,使得Mms2持续逼近指定值,直到满足要求为止。
而且,所述步骤1的具体步骤包括:
(1)被补偿仪表中,磁悬浮处于工作状态。测出此时的磁悬浮工作电流I1,同时测出仪表输出轴上的总干扰力矩M1,此时,M1=Mms1+M0,式中,M0为磁悬浮之外因素引入的干扰力矩。
(2)调整磁悬浮工作电压将磁悬浮的工作电流降为原来的二分之一,同时测出此时陀螺仪上的干扰力矩M2,此时磁悬浮引入的磁干扰力矩值为原来的四分之一,而其它因素引入的干扰力矩应保持不变,故有M2=0.25Mms1+M0。可以计算出,初始磁干扰力矩Mms1=0.75*(M1-M2)。
而且,所述步骤2的具体步骤包括:
(1)Y轴两支路的电容增加ΔCy1后导致Y支路的拉中电流减小ΔIy1,进而Y轴的拉中力减小ΔFy1;X轴两支路的电容减小ΔCx1后导致X支路拉中电流增加ΔIx1,进而X轴的拉中力增大ΔFx1。
(2)由于磁悬浮组件气隙的非理想圆柱度,ΔFy1与ΔFx1的作用下将产生绕陀螺仪输出轴的力矩ΔMms。
(3)通过控制ΔCy1、ΔCx1的正负控制ΔMms与Mms1方向相反,实现磁悬浮的磁干扰力矩的补偿。
而且,所述步骤3的具体步骤包括:
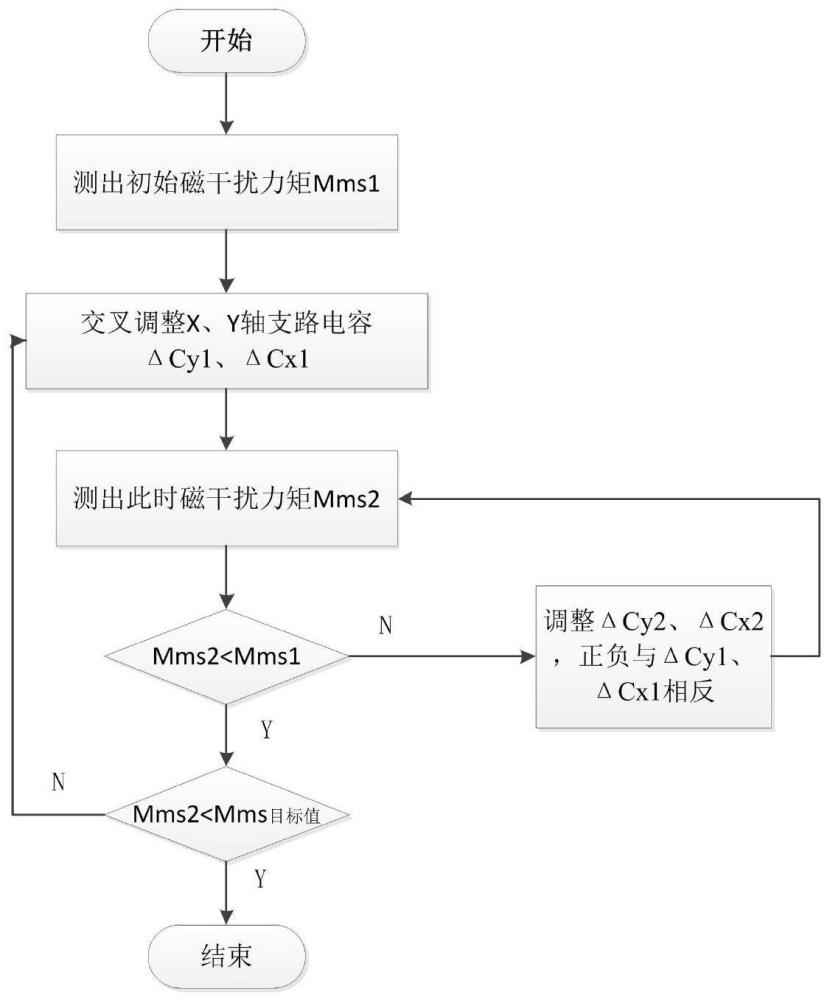
(1)测出调整后陀螺仪中磁悬浮的磁干扰力矩Mms2,如果Mms2 (2)如果Mms2>Mms1,则调整X、Y轴两支路ΔCy2、ΔCx2的正负。 (3)测出此时陀螺仪中磁悬浮的磁干扰力矩Mms3,如果Mms3 本发明的优点和有益效果: 1、本发明提出一种用于惯性仪表的无源磁悬浮偏心磁干扰力矩补偿方法,利用电参数不对称性补偿磁、结构参数不对称性,巧妙解决了磁悬浮偏心磁干扰力矩问题,补偿效果不受材料、加工装配精度等工程因素的制约,可以接近理论0值。 2、本发明用于解决磁悬浮偏心磁干扰力矩问题的成本极低,较目前“提升材料一致性、提升加工装配精度及对称性”方法具有无可比拟的成本优势,具有优异的工程可用性。 附图说明 图1是本发明的补偿方法流程图; 图2是本发明的电参数(X、Y支路电容)调整示意图。 具体实施方式 以下结合附图对本发明实施例作进一步详述: 一种用于惯性仪表的无源磁悬浮偏心磁干扰力矩补偿方法,如图1所示,包括以下步骤: 步骤1、测量初始磁干扰力矩; 所述步骤1的具体步骤包括: (1)被补偿仪表中,磁悬浮处于工作状态。测出此时的磁悬浮工作电流I1,同时测出仪表输出轴上的总干扰力矩M1,此时,M1=Mms1+M0,式中,M0为磁悬浮之外因素引入的干扰力矩。 (2)调整磁悬浮工作电压将磁悬浮的工作电流降为原来的二分之一,同时测出此时陀螺仪上的干扰力矩M2,此时磁悬浮引入的磁干扰力矩值为原来的四分之一,而其它因素引入的干扰力矩应保持不变,故有M2=0.25Mms1+M0。可以计算出,初始磁干扰力矩Mms1=0.75*(M1-M2)。 步骤2、交叉调整X、Y轴两支路的电容,对步骤1的磁悬浮的磁干扰力矩进行补偿; 所述步骤2的具体步骤包括: (1)Y轴两支路的电容增加ΔCy1后导致Y支路的拉中电流减小ΔIy1,进而Y轴的拉中力减小ΔFy1;X轴两支路的电容减小ΔCx1后导致X支路拉中电流增加ΔIx1,进而X轴的拉中力增大ΔFx1。 (2)由于磁悬浮组件气隙的非理想圆柱度,ΔFy1与ΔFx1的作用下将产生绕陀螺仪输出轴的力矩ΔMms。 (3)通过控制ΔCy1、ΔCx1的正负控制ΔMms与Mms1方向相反,实现磁悬浮的磁干扰力矩的补偿。 步骤3、测出调整后陀螺仪中磁悬浮的磁干扰力矩Mms2,如果Mms2<指定值,则补偿工作结束;否则,返回步骤2继续交叉调整X、Y轴两支路的电容,使得Mms2持续逼近指定值,直到满足要求为止。 所述步骤3的具体步骤包括: (1)测出调整后陀螺仪中磁悬浮的磁干扰力矩Mms2,如果Mms2 (2)如果Mms2>Mms1,则调整X、Y轴两支路ΔCy2、ΔCx2的正负。 (3)测出此时陀螺仪中磁悬浮的磁干扰力矩Mms3,如果Mms3 本发明的工作原理是: 本发明提出一种用于惯性仪表的无源磁悬浮偏心磁干扰力矩补偿方法,无源磁悬浮偏心磁干扰力矩产生的根源是由于磁路材料一致性、零件加工装配的对称性偏离理论值产生的,对于某一个惯性仪表成品来说,该偏离是固定值,相应的磁干扰力矩基本也是固定的。 为此,本发明的应对思路为:利用绕仪表输出轴方向相反的两个力矩对仪表的作用可以相互抵消的原则,通过调整磁悬浮的电路参数产生与磁悬浮偏心磁干扰力矩反向的力矩,来补偿磁悬浮偏心磁干扰力矩的补偿。 本发明的补偿方法如附图1所示,首先测出仪表中磁悬浮的磁干扰力矩Mms1;然后交叉调整X、Y轴两支路的电容,测出相应的磁悬浮的磁干扰力矩Mms2;判断Mms2是否小于指定值,如果Mms2<指定值,补偿工作结束,否则,返回上一步继续交叉调整X、Y轴两支路的电容,使得Mms2持续逼近指定值,直到满足要求为止。 本发明的电参数(X、Y支路电容)调整方法如图2所示,调整Y轴两支路的电容,分别增加ΔCy1,Y支路的拉中电流减小ΔIy1,进而Y轴的拉中力减小ΔFy1,同时,调整X轴两支路的电容,分别减小ΔCx1,进而X轴的拉中力增大ΔFx1;ΔFy1与ΔFx1的作用下将产生绕陀螺仪输出轴的力矩ΔMms,通过调整ΔCy1、ΔCx1的正负实现ΔMms与Mms1方向相反,实现对Mms1的补偿。 本申请是参照根据本申请实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。 这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。 这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
- 用于偏心工况的磁源补偿磁性液体密封装置及去偏心方法
- 一种基于广义内模的三轴惯性稳定平台偏心力矩补偿方法