用于在激光雷达测量中识别光晕候选者的方法和装置
文献发布时间:2024-01-17 01:15:20
技术领域
本发明涉及一种用于在激光雷达测量中识别光晕候选者的方法。
本发明还涉及一种用于在激光雷达测量中识别光晕候选者的装置和该方法的应用。
背景技术
由DE 10 2005 003 970 A1已知一种用于确定机动车上的传感器装置的功能有效性的方法,其中,由所述传感器装置检测的区域被划分为不同的子区域并且被配设给一个子区域的传感器信号被从确定的周围环境区域中评估以确定所述传感器装置的功能有效性。在此,对传感器信号进行评估,在从确定的周围环境区域旁边驶过时依次针对不同的子区域检测所述传感器信号。这些子区域涉及不同激光雷达传感器的检测区域或者激光雷达传感器的不同角扇区。
此外,由DE 10 2018 003 593 A1公知一种用于运行车辆的辅助系统的方法,其中,借助于辅助系统使车辆在自主行驶运行中运动并且辅助系统包括具有多个布置在车辆中和/或上的检测单元的周围环境传感装置。在车辆的自主行驶运行中,借助检测单元检测车辆的周围环境和处于该周围环境中的对象,其中,借助监控模块连续地监控各个检测单元的功能并且在检测单元失效时仅仅借助与监控模块连接的计划模块解除激活与该失效的检测单元连接的辅助功能。检测单元包括基于激光雷达的传感器。
未公开的DE 10 2020 110 809.5描述了用于识别激光雷达测量中的光晕的装置和方法,其中,在主动测量和被动测量中求取与激光雷达反射点的距离。在此,基于激光脉冲的信号传播时间在主动测量中求取第一距离值。此外,基于对从不同的测量位置执行的二维强度测量的三角测量在被动测量中求取第二距离值。如果第二距离值以预设的程度超过第一距离值,则推断为是“光晕”。
从Kaszubiak Jens等人的发表于IEEE Proceedings.Intelligent VehiclesSymposium.2005.IEEE.2005.第619至624页的“Real-time vehicle and lane detectionwith embedded hardware”已知一种用于借助立体相机检测车辆周围环境的方法。
此外,US 2019/0391270 A1描述了一种用于减小激光雷达数据中的高反射对象的影响的装置和方法。
发明内容
本发明的任务在于,提供一种用于在激光雷达测量中识别光晕候选者的新型方法和新型装置以及这种方法的应用。
根据本发明,该任务通过具有在权利要求1中给出的特征的方法、通过具有在权利要求6中给出的特征的装置、以及通过具有在权利要求9中给出的特征的应用来解决。
本发明的有利的设计方案是从属权利要求的主题。
在用于识别激光雷达测量中的光晕候选者的方法中,根据本发明创建在激光雷达测量中产生的点云的点的基于距离的直方图。在直方图中,识别具有与执行激光雷达测量的激光雷达传感器相同距离的点的群集,并且评估群集、尤其是相应的群集的点的强度。当所述群集包含具有分别超过预设极限值的强度的点时,所述群集的具有分别不超过预设极限值、尤其是低于预设极限值超过预设阈值的强度的那些点被分类为光晕候选者。在该方法的可能的设计方案中,所述群集的具有分别超过所述预设极限值的强度的那些点被分类为高反射的测量值,尤其是被分类为正确肯定的测量值。
在此,光晕在此理解为激光雷达测量中的过度曝光或串扰。当由激光雷达发射的激光脉冲被强反射的目标、例如交通标志或前照灯反射器、尤其是构造为回射器的目标反射时,例如出现光晕。在这种情况下,与反射较少的目标相比,大量发射能量被返回发射到激光雷达。在此,返回发射的光束通常不是最佳地聚焦的。这样做的原因是多种多样的,通常是这样的,即,来自目标的反射通常不是最佳地镜反射,大气中的颗粒使激光束偏移或者激光雷达的遮盖部上的污物引起光散射。这可能导致,所返回发射的光入射到激光雷达的多个在空间上彼此靠近地布置的接收单元上或者所返回发射的光过渡到相邻的像素上。由此,根据探测器的灵敏度触发距离测量。
光晕效应通常在距激光雷达较近的距离处更为强烈,因为随着光必须行进的距离增加,从目标反射的能量量迅速减少。
激光雷达在驾驶员辅助系统和其他自动化运行的平台、例如机器人中扮演重要的角色,因为它们能够实现激光雷达的周围环境的精确的三维显示。然而在出现光晕时,在测量激光雷达和在其周围环境中检测的对象之间的距离时会出现错误的结果。尤其是由于光晕效应会产生错误肯定的激光雷达测量,从而使得难以精确地三维显示周围环境。
借助该方法能够以简单的方式在激光雷达测量中可靠地识别光晕候选者,从而可以避免或至少可靠地识别在这种距离测量中的错误结果并且可以相应地例如在下游软件模块中将光晕候选者像这样来处理。由此实现了应用的安全运行,例如自动化地、尤其是高度自动化地或自主地行驶的或运动的车辆和机器人的安全运行。
因此,例如在可自动化地、尤其是高度自动化地或自主地能运行的车辆或机器人的运行期间使用该方法时,可以使如下危险最小化,即,在进一步的数据处理、例如传感器融合中假设的是,在出现光晕的位置处存在障碍物、例如拥堵端。
尤其是,在所述方法在可自动化运行的车辆或机器人运行期间的这种应用中,根据在激光雷达测量中检测的数据对车辆或机器人进行控制,其中,在所述执行时,借助于所述方法将经分类的点考虑为光晕候选者。例如,在此该方法的结果流入算法,在该算法中决定,所检测的点是对象还是由光晕得到的测量。
例如由出现光晕引起的由驾驶员辅助系统必要时不期望地引入的制动、转向干预和/或其他措施可以因此可靠地被避免。也可以可靠地识别由光晕候选者导致的实际障碍物的遮盖。
在该方法的另外的可能的设计方案中,为了产生点云,借助激光雷达传感器的发射器发射线状的激光脉冲和/或矩形的激光脉冲。由此,在激光雷达传感器的扫描时间特别短的同时能够实现特别大的空间分辨率。对于在对象上反射的入射到激光雷达传感器的接收器上的每个激光脉冲,在点云中产生一个点,其中,为了求取与对象的距离,在激光雷达传感器的周围环境中检测直至反射的激光脉冲入射到激光雷达传感器的接收器上的时间,并且为每个点配设所求取的距离的值。
在本方法的另外的可能的设计方案中,借助激光脉冲逐行地、逐列地并且/或者划分成多个子区域地扫描周围环境。这能够实现激光雷达传感器的周围环境的可靠且精确的检测和映射。
为了进一步提高激光雷达传感器的周围环境的检测和映射的精度,在本方法的另外的可能的设计方案中,将激光雷达传感器的周围环境划分成多个子区域,并且针对每个子区域创建在激光雷达测量中产生的点云的点的至少一个基于距离的直方图。
根据本发明,用于在激光雷达测量中识别光晕候选者的装置包括处理单元,该处理单元被构造用于创建在激光雷达测量中产生的点云的点的基于距离的直方图,在该直方图中识别与执行激光雷达测量的激光雷达传感器具有相同距离的点的群集,评估群集、尤其是相应的群集的点的强度,并且然后当所述群集包含具有分别超过预设极限值的强度的点时,所述群集的具有分别不超过预设极限值、尤其是低于预设极限值超过预设阈值的强度的那些点被分类为光晕候选者。在所述装置的可能的设计方案中,处理单元被构造用于将所述群集的具有分别超过所述预设极限值的强度的那些点分类为高反射的测量值,尤其是分类为正确肯定的测量值。
借助该装置能够以简单的方式在激光雷达测量中可靠地识别光晕候选者,从而可以避免或至少可靠地识别在这种距离测量中的错误结果并且可以相应地例如在下游软件模块中将光晕候选者像这样来处理。由此实现了应用的安全运行,例如自动化地、尤其是高度自动化地或自主地行驶的或运动的车辆和机器人的安全运行。
因此,例如在能够自动化地、尤其是高度自动化地或自主地运行的车辆或机器人的运行期间应用该装置时,可以使如下危险最小化,即,在进一步的数据处理、例如传感器融合中假设的是,在出现光晕的位置处存在障碍物、例如拥堵端。例如,由此引起的可能由驾驶员辅助系统不期望的制动可以因此可靠地被避免。也可以可靠地识别由光晕候选者导致的实际障碍物的遮盖。
在该装置的另外的可能的设计方案中,激光雷达传感器包括至少一个基于光栅的接收器,以便在激光雷达传感器的扫描时间特别短的同时能够实现特别大的空间分辨率。
附图说明
下面借助于附图对本发明的实施例进行更详细解释。
在此,示出:
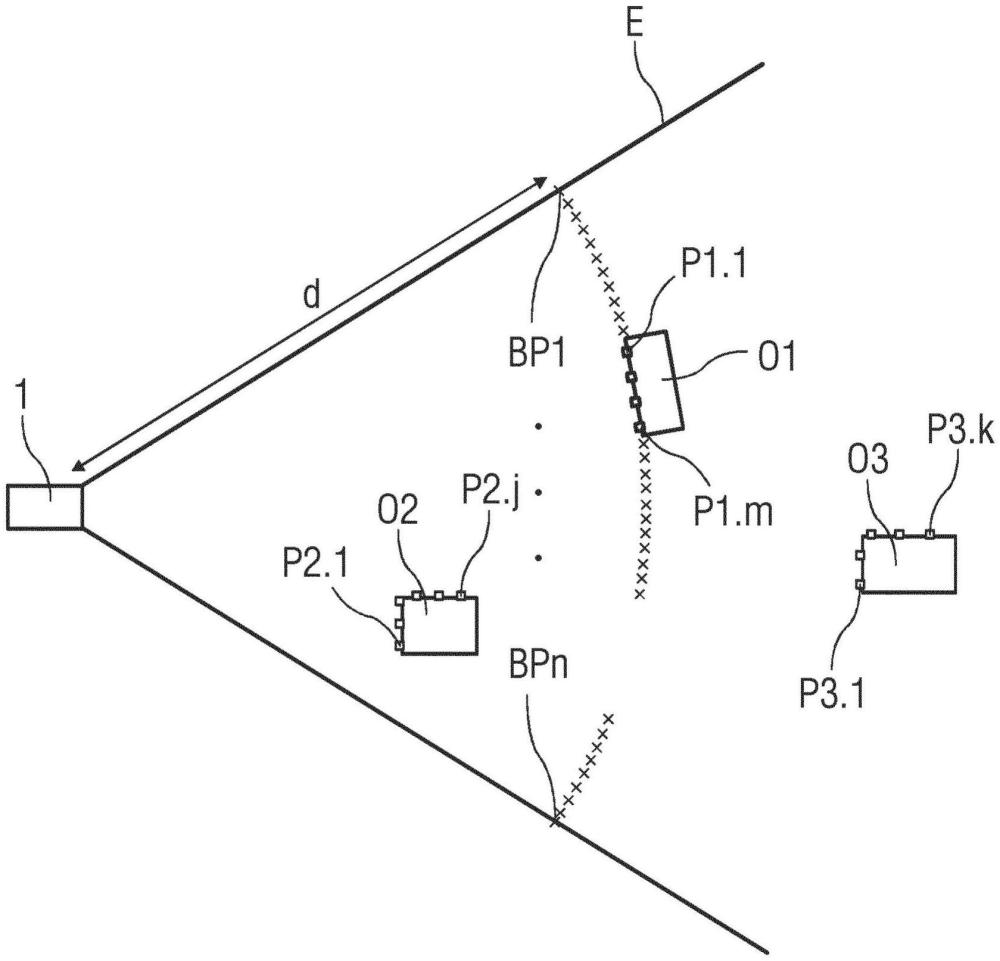
图1示意地示出具有检测区域和处于检测区域中的对象的激光雷达传感器。
具体实施方式
在唯一的图1中以俯视图示出激光雷达传感器1和由激光雷达传感器1监控的周围环境。
三个对象01至03处于激光雷达传感器1的周围环境内,所述对象由激光雷达传感器1在检测区域E内检测。
激光雷达传感器1例如布置在自动化地、尤其是高度自动化地或自主地行驶的车辆上。激光雷达传感器1也可以备选地布置在机器人上。
第一对象01是高反射的对象01,例如逆反射的交通标志或车辆的号牌。第二对象02和第三对象03分别具有很小的反射率。
借助激光雷达传感器1求取与其周围环境中的对象01至03的距离,办法是:发射激光脉冲并且检测直至反射的激光脉冲入射到激光雷达传感器1的尤其格栅状构造的接收器上的时间。在此,激光雷达传感器1可以包括多个被构造为激光器的发射器和/或多个接收器,以便提高激光雷达传感器1的测量率和空间分辨率。在此,借助激光雷达传感器1实施的测量(也称为扫描)可以这样实施,使得完整的扫描可以被解释为二维的测量网格(也称为激光雷达图像)。
尤其是,为了产生点云,借助激光雷达传感器1的发射器发射线状的激光脉冲和/或矩形的激光脉冲。尤其是,借助激光脉冲,逐行地、逐列地和/或分成多个子区域地扫描周围环境。
对于在对象01至03上反射的入射到激光雷达传感器的接收器上的每个激光脉冲,在点云中产生点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k,其中,为了求取与在所述激光雷达传感器的周围环境中的对象01至03的距离,检测直至所反射的激光脉冲入射到所述激光雷达传感器的接收器上的时间。然后,为每个点分配一个所求取的距离的值。在此,直接处于对象01至03上的所示出的点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k表示正确肯定的测量。这些点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k在图1中被示为小方块。属于第三对象03的点P3.1至P3.k由于其位置而成为二阶测量点。
在激光雷达传感器1的所示出的周围环境中,第一对象01由于其高反射率在激光测量期间在侧向上以及在对象01上方和下方与激光雷达传感器1相距相同距离地产生被构造为光晕点的点BP1至BPn,从而产生所谓的光晕伪影。这些点BP1至BPn在图1中示出为十字。这些点BP1至BPn围绕对象01以距激光雷达传感器1相同的距离半圆形地分布。如果这些被构造为光晕点的点BP1至BPn不被这样探测,则存在的危险是,在进一步的数据处理、例如传感器融合中由此得出,在那里存在障碍物、例如拥堵端,从而由驾驶员辅助系统可能触发不期望的制动。真实的障碍物、例如对象03也可能由于这种光晕伪影而被遮盖,从而在激光雷达测量中不能识别这些障碍物。
在此,被构造为光晕点的点BP1至BPn表示错误肯定的测量。
为了可靠地探测这些被构造为光晕点的点BP1至BPn而提出的是,创建在激光雷达测量中产生的点云的点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k、BP1至BPn的基于距离的直方图,也称为基于范围的直方图。在此,基于距离的直方图是这样的直方图,该直方图示出在哪个距离处检测到多少个点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k、BP1至BPn。为了创建直方图,可以将所述激光雷达传感器1的周围环境划分为多个子区域并且针对每个子区域创建在所述激光雷达测量中产生的点云的点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k、BP1至BPn的至少一个基于距离的直方图。
在此,由借助激光雷达传感器1检测的数据可以求取每个点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k、BP1至BPn的两个特征。这就是如前所述的相应点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k、BP1至BPn与激光雷达传感器1的距离,以及相应点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k、BP1至BPn的测量强度,也就是说,在相应点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k、BP1至BPn处的对象01至03的哪种光量被返回发射到激光雷达传感器1的接收器。
根据强度的特征,从等距的点P1.1至P1.m和BP1至BPn的集合中,点P1.1至P1.m可以与被构造为光晕点的点BP1至BPn区分,因为从对象01、也就是说从点P1.1至P1.m将大量的具有高强度的光反射回到接收器。相反,通过点BP1至BPn上的光晕效应引起的错误肯定测量通过激光雷达传感器1的物镜中的散射光在其接收器上产生。在此,强度通常比点P1.1至P1.m的强度小若干个数量级。
在此,通过将一列内的激光雷达测量插入到直方图中来产生基于距离的直方图。如果出现光晕效应,则预期在完全相同的距离处存在非常大量的点,这里,在距离d处存在点P1.1至P1.m和BP1至BPn。这随后导致在直方图颜色区间内的高偏差。这些测量来自实际对象01至03是非常不可能的,因为否则激光雷达传感器1必须处于过大的球体中,以便返回相应的信号。如果同时在这些测量中高的强度值处于直方图的相同的颜色区间中,也就是说在距激光雷达传感器1相同距离的多个点P1.1至P1.m、BP1至BPn处,则可以可靠地假定光晕效应。
出于这个原因,在直方图中识别到具有与执行激光雷达测量的激光雷达传感器1相同距离的点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k、BP1至BPn的群集。在当前情况下,识别具有距离d的点的群集,即点P1.1至P1.m和BP1至BPn。附加地,对这些点P1.1至P1.m和BP1至BPn的强度进行评估。如果强度的评估得出,该群集包含其强度分别超过预设的极限值的点,则推断出光晕效应,因为光晕在高反射的对象中出现并且高强度是高反射的对象的标志。该群集的具有分别超过预设极限值的强度的所有那些点、在此是点P1.1至P1.m都被分类为高反射的测量值,尤其是被分类为正确肯定的测量值。所述群集的具有分别不超过、尤其是低于预设极限值、尤其是显著地、即以超过预设的阈值的程度低于预设极限值的强度的所有那些点被分类为光晕候选者。在此,这些是点BP1至BPn。
在可能的设计方案中,下游的算法可以在传感器融合中相应地处理所获得的信息。通过使用借助于另外的传感器、例如在另外的位置处的激光雷达传感器、摄像头或雷达传感器所求取的另外的信息,可以验证和/或补充借助于激光雷达传感器1的测量所获得的信息。
例如,在此关于光晕候选者的结果流入算法中,在该算法中决定,所检测的点P1.1至P1.m、P2.1至P2.j、P3.1至P3.k、BP1至BPn是对象01至03还是由光晕得到的测量。
如果在激光雷达测量中识别到由出现光晕得到的测量,则由驾驶员辅助系统在存在实际对象01至03的情况下不执行例如所执行的制动、转向干预和/或其他措施并且因此减小车辆乘客和其他交通参与者的由此引起的危险。
也可能的是,当在激光雷达测量中识别到由出现光晕得到的测量时,可靠地识别由于光晕候选者引起的真实障碍物的遮盖。相反,在识别到这种遮盖时,可以有效地避免借助驾驶员辅助系统进行的制动、转向干预和/或其他措施的自动执行的停滞,从而进一步降低车辆乘客和其他交通参与者的危险。
附图标记列表
1激光雷达传感器BP1至BPn点
d 距离
E 检测区域
01至03 对象
P1.1至P1.m点
P2.1至P2.j点
P3.1至P3.k点
- 用于减少对象识别方法的检测候选者数量的方法和装置
- 旋转角传感器装置、激光雷达系统、工作装置和用于激光雷达系统的运行方法
- 旋转角传感器装置、激光雷达系统、工作装置和用于激光雷达系统的运行方法
- 用于测量多线激光雷达的角分辨率的方法和装置
- 一种用于激光雷达系统的测量调试装置
- 用于识别激光雷达测量中的光晕的方法和装置
- 用于减少对象识别方法的检测候选者数量的方法和装置