医学成像系统及其空气过滤器的清洁装置和方法
文献发布时间:2024-01-17 01:15:20
技术领域
本发明的实施例涉及医学成像技术,更具体地涉及一种医学成像系统以及用于清洁医学成像系统的空气过滤器的装置和方法。
背景技术
医学成像系统可包括容纳于其中的电子器件以及用于防止电子器件过热的冷却机构,在诸如超声设备的一些采用气体流通来进行冷却的医疗成像系统中,可能包括过滤器,其用于过滤进入医学成像系统中的冷却气体,该冷却气体可以是外部环境中的空气。经过滤的空气通过电子器件后排出医学成像系统,以带走热量。医学成像系统的上述过滤器需要定期更换或进行清洁。通常手动进行过滤器更换或清洁。如果未能及时清洁或更换过滤器,可能由于过滤器积有过多灰尘影响空气流通,造成电子器件过热,导致系统性能降低甚至系统故障。而如果过于频繁地更换或清洁频率,可能造成人力成本的浪费。
发明内容
本发明一方面提供一种医学成像系统的空气过滤器的清洁装置,包括:连动组件;过滤器清洁组件,安装在所述连动组件上;驱动组件,连接所述连动组件,所述驱动组件用于响应接收的控制信号以驱动所述连动组件运动,进而带动所述过滤器清洁组件相对所述空气过滤器运动来对所述空气过滤器进行清洁,所述过滤器清洁组件的延伸轴上每一点的运动轨迹形成一个圆的至少一部分或多个重复的圆的至少一部分,且所述延伸轴在所述运动的任意时刻沿第一延伸方向延伸。
另一方面,所述连动组件包括第一曲柄,第二曲柄、支架和安装架,所述第一曲柄、支架、第二曲柄和安装架依次铰接,且所述第一曲柄、支架、第二曲柄和安装架的中心轴形成平行四边形,所述过滤器清洁组件安装在所述安装架上,所述驱动组件用于与所述第一曲柄和第二曲柄中的至少一个连接,以驱动所述第一曲柄和第二曲柄绕各自的第一端旋转,并带动所述安装架及其上的过滤器组件运动。
另一方面,所述支架用于相对于所述医学成像系统的外壳被固定,或者,所述支架包括所述外壳的一部分。
另一方面,所述第一曲柄的第一端通过第一连接轴连接所述支架的第一端,所述支架的第二端通过第二连接轴连接所述第二曲柄的第一端,所述驱动组件用于与所述第一连接轴和第二连接轴中的至少一个连接,以驱动对应的第一连接轴和第二连接轴中的至少一个旋转,并带动对应的第一曲柄和第二曲柄绕各自的第一端旋转。
另一方面,所述驱动组件包括马达和驱动轴,所述驱动轴的第一端用于连接所述第一连接轴,所述马达连接所述驱动轴的第二端,所述马达用于响应所述控制信号以驱动所述驱动轴旋转,并带动所述第一连接轴旋转。
另一方面,所述驱动组件还包括连接在所述驱动轴和第一连接轴之间的齿轮传动组件,其用于将所述驱动轴的旋转力变换方向后传递至所述第一连接轴。
另一方面,所述安装架和所述第一曲柄之间设有第一弹性部件,所述安装架和所述第二曲柄之间设有第二弹性部件。
另一方面,所述支架被设置为沿所述第一方向延伸,所述清洁装置还包括限位架和限位组件,所述限位架被设置为沿第二延伸方向的延伸,所述第一延伸方向和第二延伸方向互相垂直,所述限位组件被设置为与所述安装架相配合以沿所述第一延伸方向移动,限位组件还被设置为与所述限位架相配合以沿所述第二延伸方向移动。
另一方面,所述限位架和支架中的每个在其中心位置与另一个连接。另一方面,所述过滤器清洁组件用于遍历一个清洁区域,所述清洁区域至少包括一个中间部分和分别连接所述中间部分的两侧的两个弧形部分。
本发明另一方面还提供一种医学成像系统的空气过滤器的清洁装置,包括:连动组件,包括第一曲柄、第二曲柄以及安装架,所述第一曲柄和第二曲柄的具有互相平行的延伸轴,所述第一曲柄、第二曲柄以及安装架分别包括第一端和第二端,所述安装架的第一端和第二端分别与所述第一曲柄的第二端和第二曲柄的第二端铰接;过滤器清洁组件,安装在所述安装架上;驱动组件,连接所述第一曲柄和第二曲柄中的至少一个,所述驱动组件用于响应接收的控制信号以驱动所述连动组件的第一曲柄和第二曲柄绕其第一端旋转,并带动所述过滤器清洁组件相对所述空气过滤器运动来对所述空气过滤器进行清洁。
另一方面,还包括支架,所述第一曲柄和第二曲柄的第一端分别与所述支架的第一端和第二端相铰接,所述支架用于相对于所述医学成像系统的外壳被固定,或者,所述支架包括所述外壳的一部分。
另一方面,所述第一曲柄和第二曲柄的第一端分别通过第一连接轴和第二连接轴与所述支架的第一端和第二端相铰接,所述驱动组件包括马达和驱动轴,所述驱动轴的第一端用于连接所述第一连接轴和第二连接轴的至少一个,所述马达连接所述驱动轴的第二端,所述马达用于响应所述控制信号以驱动所述驱动轴旋转,并带动所述第一连接轴和第二连接轴的至少一个旋转,进而带动所述第一曲柄和第二曲柄绕其第一端旋转。
另一方面,所述支架被设置为沿第一方向延伸,所述清洁装置还包括限位架和限位组件,所述限位架被设置为沿第二延伸方向的延伸,所述第一延伸方向和第二延伸方向互相垂直,所述限位组件被设置为与所述安装架相配合以沿所述第一延伸方向移动,限位组件还被设置为与所述限位架相配合以沿所述第二延伸方向移动。
本发明另一方面还提供一种医学成像系统,包括:
外壳,所述外壳具有至少一个进风口和至少一个出风口;设置在所述至少一个进风口和至少一个出风口之间的至少一个空气过滤器;以及,至少一个上述任一方面的清洁装置,所述至少一个清洁装置安装在所述外壳上。
另一方面,所述医学成像系统为超声系统。
本发明另一方面还提供一种医学成像系统的空气过滤器的清洁方法,该系统包括任一方面所述的医学成像系统,所述方法包括:监测所述至少一个空气过滤器的操作条件;确定所述操作条件不在预定阈值内;以及向所述至少一个清洁装置提供所述控制信号。
另一方面,该方法还包括:接收来自所述至少一个清洁装置的状态反馈信号;基于所述状态反馈信号确定对所述至少一个空气过滤器的清洁任务已完成;以及,响应于对所述至少一个空气过滤器的清洁任务已完成,控制所述至少一个清洁装置停止工作。
另一方面,该方法还包括:确定所述驱动组件前次对所述连动组件进行驱动的驱动方向;其中,向所述至少一个清洁装置发送的所述控制信号用于控制所述驱动组件沿所述驱动方向的反方向驱动所述连动组件。
应理解,提供上文的简要描述是为了以简化的形式介绍在具体实施方式中进一步描述的一些概念。这并不意味着识别所要求保护的主题的关键或必要特征,其范围由详细描述之后的权利要求唯一地限定。此外,所要求保护的主题不限于解决在上文中或在本公开的任一区段中所提及的任何缺点的实现。
附图说明
参考所附附图,通过阅读下列非限制性实施例的描述,本发明将被更好地理解,其中:
图1是根据本发明各种实施例的医学成像系统100的框图;
图2示出了根据各种实施方案的示例性超声系统200的结构示意图;
图3是根据各种实施方案的图2的示例性超声系统100的分解图;
图4示出了根据各种实施方案的另一个示例性超声系统400的分解图;
图5示出了根据各种实施方案的示例性的清洁装置500安装在超声系统400中的结构示意图;
图6示出了根据各种实施方案的示例性的清洁装置500的分解图;
图7示出了过滤器清洁组件的运动轨迹的一个示例;
图8示出了连动组件从起始位置运动至多个不同位置时的状态图;
图9示出根据各种实施方案的示例性步骤的流程图900;
图10示出根据各种实施方案的示例性步骤的流程图1000;
图11示出根据各种实施方案的示例性步骤的流程图1100;以及
图12示出根据各种实施方案的示例性步骤的流程图1200。
具体实施方式
以下将描述本发明的具体实施方式,需要指出的是,在这些实施方式的具体描述过程中,为了进行简明扼要的描述,本说明书不可能对实际的实施方式的所有特征均作详尽的描述。应当可以理解的是,在任意一种实施方式的实际实施过程中,正如在任意一个工程项目或者设计项目的过程中,为了实现开发者的具体目标,为了满足系统相关的或者商业相关的限制,常常会做出各种各样的具体决策,而这也会从一种实施方式到另一种实施方式之间发生改变。此外,还可以理解的是,虽然这种开发过程中所作出的努力可能是复杂并且冗长的,然而对于与本发明公开的内容相关的本领域的普通技术人员而言,在本公开揭露的技术内容的基础上进行的一些设计,制造或者生产等变更只是常规的技术手段,不应当理解为本公开的内容不充分。
除非另作定义,权利要求书和说明书中使用的技术术语或者科学术语应当为本发明所属技术领域内具有一般技能的人士所理解的通常意义。本发明专利申请说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“一个”或者“一”等类似词语并不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同元件,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,也不限于是直接的还是间接的连接。
图1是根据本发明各种实施例的医学成像系统100的框图,该医学成像系统100具有一个或多个空气过滤器,并能够被操作以自动对该空气过滤器进行清洁。图2、图3、图4示出了示例性的超声成像系统,然而,应当指出的是,本发明的各方面不限于超声成像系统,而适用于具有空气过滤器的任何医学成像系统。
参考图1,医学成像系统100包括设置在外壳102中的主电子器件110、AC电源箱130、空气过滤器140和空气流动特性传感器。医学成像系统100还包括用户输入设备180和通信地耦接到主电子器件110的显示系统182。
用户输入设备180可用于输入患者数据、医学成像参数、设置、选择协议和/或模板等。在示例性实施方案中,用户输入设备180可操作以配置、管理和/或控制医学成像系统100中的一个或多个部件和/或模块的操作。就这一点而言,用户输入设备180可操作以配置、管理和/或控制医学成像电子器件112、空气过滤器处理器114、存储模块116、用户输入设备180和/或显示系统182的操作。用户输入设备180可包括触摸面板、按钮、旋转编码器、运动跟踪、语音识别、鼠标设备、键盘、相机和/或能够接收用户指令的任何其他设备。在某些实施方案中,例如,用户输入设备180中的一者或多者可集成到其他部件,诸如显示系统182中。例如,用户输入设备180可包括触摸屏显示器。
显示系统182可为能够将视觉信息传送给用户的任何设备。例如,显示系统182可包括液晶显示器、发光二极管显示器、和/或任何合适的一种或多种显示器。显示系统182可操作以显示来自医学成像电子器件112、空气过滤器处理器114和/或存储模块116的信息,诸如空气过滤器清洁设置、医学图像数据和/或任何合适的信息。
主电子器件110包括医学成像电子器件112、空气过滤器处理器114、存储模块116、计数器118和风扇120。风扇120可被配置成通过以下方式来防止主电子器件110过热:使环境温度空气101经由空气过滤器140吸入外壳102并且流经主电子器件110。由主电子器件110产生的热量被传递到被吸入医学成像系统外壳102中的环境温度空气101。然后,暖空气103从外壳102排出。
AC电源箱130可包括AC/DC转换器132和风扇134。风扇134可被配置成通过以下方式来防止AC电源箱130过热:使环境温度空气101经由空气过滤器140吸入到外壳102中,并流经AC电源箱130。由AC电源箱130产生的热量被传递到被吸入医学成像系统外壳102中的环境温度空气。然后,暖空气107从外壳102排出。
基于以上描述,环境温度空气可以在经由相同的空气过滤器(例如空气过滤器140)过滤后依次或分别在风扇120和134的作用下流经主电子器件110和AC电源箱130。然而,AC医学成像系统100可以包括多个空气过滤器,以分别对从多个不同位置进入壳体的环境温度空气进行过滤。例如,还可以包括空气过滤器160,风扇134可被配置成通过以下方式来防止AC电源箱130过热:使环境温度空气105经由空气过滤器160吸入到外壳102中,并流经AC电源箱130。由AC电源箱130产生的热量被传递到被吸入医学成像系统外壳102中的环境温度空气。然后,暖空气107从外壳102排出。
医学成像电子器件112可被配置成通过探头、扫描仪等(未示出)控制医学图像数据的采集,从探头、扫描仪等(未示出)接收医学图像数据,并且根据与所接收的医学图像数据相对应的模态来执行一个或多个处理操作。医学成像电子器件112可包括合适的逻辑、电路、接口和/或代码,该逻辑、电路、接口和/或代码可操作以处理医学图像数据,从而生成用于在显示系统182上呈现的医学图像。在示例性实施方案中,医学成像电子器件112可操作以执行显示处理和/或控制处理等。当接收到医学图像数据时,可以在医学成像检查期间实时处理所采集的医学图像数据。除此之外或另选地,医学图像数据可在医学成像检查期间暂时存储,并且通过在线或离线方式被操作以进行图像处理。在各种实施方案中,所处理的医学图像数据可呈现在显示系统182处以及/或者可存储在存储模块116中。存储模块116可以是本地存储器、图片归档和通信系统(PACS),或用于存储医学图像和相关信息的任何合适的设备。医学成像电子器件112可以包括一个或多个中央处理单元、微处理器、微控制器等。例如,医学成像电子器件112可以是集成部件,或者可分布在各个位置上。在示例性实施方案中,医学成像电子器件112可能够从用户输入设备180和/或存储模块116接收输入信息,生成可由显示系统182显示的输出,并且响应于来自用户输入设备180的输入信息而操纵输出等。
空气过滤器处理器114可包括合适的逻辑、电路、接口和/或代码,该逻辑、电路、接口和/或代码可操作以向空气过滤器140和/或空气过滤器160提供控制信号,从而开始空气过滤器140和/或空气过滤器160的自动清洁。空气过滤器处理器114可被配置成当其确定所监测的空气过滤器操作条件不再在预定阈值内时提供控制信号。所监测的空气过滤器操作条件可包括医学成像系统100已通电的时间量。除此之外和/或另选地,所监测的空气过滤器操作条件可包括由上述空气过滤器传感器检测到的空气流动特性。例如,空气过滤器传感器可以包括对空气过滤器140进行空气流动特性进行检测的传感器152和/或用于对空气过滤器160进行空气流动特性进行检测的传感器172。空气流动特性可包括由质量流速传感器测量的空气的流速、由压差传感器测量的空气过滤器的压降、或由任何合适的传感器、仪表、阀等测量的任何合适的空气流动特性。空气过滤器处理器114可被配置成响应于确定至少一个所监测的空气过滤器操作条件不在预定阈值内,而生成发送到适当的空气过滤器的清洁装置的控制信号。由空气过滤器处理器114提供的控制信号可启动对应的清洁装置以开始自动清洁,如下文结合清洁装置500所述。
空气过滤器处理器114可以是一个或多个中央处理单元、微处理器、微控制器等。例如,空气过滤器处理器114可以是集成部件,或者可分布在各个位置上。在示例性实施方案中,空气过滤器处理器114可能够从用户输入设备180和/或存储模块116接收输入信息,监测空气过滤器操作条件,并且向空气过滤器提供控制信号以开始空气过滤器的自动清洁等。例如,空气过滤器处理器114可能够执行根据各种实施方案的本文所讨论的方法和/或指令集中的任一者。
空气过滤器处理器114可包括合适的逻辑、电路、接口和/或代码,该逻辑、电路、接口和/或代码可操作以监测由计数器118跟踪的医学成像系统100已通电的时间量或启动次数,以确定何时向空气过滤器140和/或空气过滤器160提供控制信号,从而开始空气过滤器140、160的自动清洁。例如,主电子器件110可以包括计数器118,该计数器118包括合适的逻辑、电路、接口和/或代码,该逻辑、电路、接口和/或代码可操作以跟踪医学成像系统100通电的时间量。计数器118可被配置成当医学成像系统100通电时连续递增,直到医学成像系统100断电。计数器118可被配置成当医学成像系统100再次通电时恢复递增。在各种实施方案中,空气过滤器处理器114可以连续地或周期性地监测计数器118,以确定医学成像系统100的当前通电时间或启动次数何时超过预定阈值。预定阈值可由制造商、供应商、用户等设定。例如,预定阈值可为7天、30天、60天或任何合适的时间量,预定阈值可为7次、30次、60次或任何合适的启动次数。在各种实施方案中,对于医学成像系统100中的每个空气过滤器140、160,预定阈值可以相同或不同。空气过滤器处理器114可被配置成基于与相应的空气过滤器140、160相关联的预定阈值,向适当的空气过滤器140、160提供控制信号。空气过滤器处理器114可被配置成当已经超过预定阈值并且控制信号被发送到空气过滤器140、160时,重置计数器118。
空气过滤器处理器114可包括合适的逻辑、电路、接口和/或代码,该逻辑、电路、接口和/或代码可操作以监测由传感器152、172提供的空气流动特性,以确定何时向空气过滤器140和/或空气过滤器160提供控制信号,从而开始空气过滤器140、160的自动清洁。在各种实施方案中,空气过滤器处理器114可以连续地或周期性地监测由传感器152和/或传感器172提供的空气流动特性,以确定医学成像系统100的空气过滤器140、160中的一个或多个空气过滤器的空气流动特性何时在预定阈值之外。预定阈值可由制造商、供应商、用户等设定。例如,预定阈值可以是最小质量流速、最大压降或空气流动特性的任何合适值。在各种实施方案中,对于医学成像系统100中的每个空气过滤器140、160,预定阈值可以相同或不同。空气过滤器处理器114可被配置成基于适当的空气过滤器140、160的空气流动特性落在与相应的空气过滤器140、160相关联的预定阈值之外,来向该空气过滤器140、160提供控制信号。
存储模块116可以是与医学成像系统100集成和/或通信地联接(例如,通过网络)到医学成像系统100的一个或多个计算机可读存储器,诸如图片归档和通信系统(PACS)、服务器、硬盘、软盘、CD、CD-ROM、DVD、紧密存储器、闪存存储器、随机存取存储器、只读存储器、可电擦除和可编程只读存储器,和/或任何合适的存储器。例如,存储模块116可包括数据库、库、信息集或其他存储器,该数据库、库、信息集或其他存储器由医学成像电子器件112和/或空气过滤器处理器114访问和/或与之结合。例如,存储模块116能够暂时或永久地存储数据。存储模块116可能够存储医学图像数据、由医学成像电子器件112和/或空气过滤器处理器114生成的数据、和/或由医学成像电子器件112和/或空气过滤器处理器114可读的指令等。例如,在各种实施方案中,存储模块116存储供空气过滤器处理器114执行的指令,以用于监测计数器118和/或传感器152、172,从而生成用于自动清洁空气过滤器140、160的控制信号。
AC/DC转换器132可以包括合适的逻辑、电路、接口和/或代码,该逻辑、电路、接口和/或代码可操作以将来自外部电源(未示出)的交流电(AC)转换为直流电(DC),以用于为医学成像系统100的部件供电,诸如主电子器件110、风扇120、134、传感器152、172、空气过滤器140、160、用户输入设备180和/或显示系统182。
医学成像系统100可以包括一个或多个空气过滤器140、160,该一个或多个空气过滤器被配置成过滤被吸入医学成像系统100的外壳102中的空气202、206,以用于冷却医学成像系统100的部件,诸如主电子器件110和AC电源箱130。例如,一个或多个空气过滤器140可包括用于过滤经过主电子器件110的空气的主体空气过滤器140、用于过滤经过AC电源箱130的空气的AC电源箱空气过滤器160、和/或任何合适数量的空气过滤器140、160。空气过滤器140、160可以各种尺寸制造,诸如较大的空气过滤器140、较小的空气过滤器160或任何合适数量的尺寸。
医学成像系统100可以包括一个或多个清洁装置500,用于对上述一个或多个空气过滤器140、160进行自动清洁。该清洁装置500可以包括驱动组件510、与驱动组件510连接的连动组件520和设置在连动组件520上的过滤器清洁件530。在各种实施方案中,一个或多个传感器152、172可定位在空气过滤器140、160中的每个过滤器附近,以用于监测相应空气过滤器140、160的至少一个空气流动特性。清洁装置500可被配置成响应于从空气过滤器处理器114接收到控制信号,而自动清洁过滤器140、160。例如,控制信号可启动驱动组件510。驱动组件510被启动时,带动连动组件520运动,进而带动该过滤器清洁组件530整体做平移圆周运动,过滤器清洁件530随连动组件520运动的过程中作用于过滤器140、160以对过滤器140、160进行清洁,例如,使灰尘和其他颗粒从空气过滤器140、160脱离。在该平移圆周运动的过程中,该过滤器清洁组件的延伸方向不变,例如,过滤器清洁组件在进行清洁的过程中不发生扭转,而是整体进行平移,过滤器清洁组件平移时,其上的每一点圆形轨迹移动。由空气过滤器处理器114提供的控制信号可在预定时间量内提供给驱动组件510,该预定时间量足以在关闭清洁装置500之前清洁对应的空气过滤器140、160。
医学成像系统100的部件可在软件、硬件、固件等中实现。医学成像系统100的各种部件可以通信地连接。医学成像系统100的部件可单独实现和/或以各种形式集成。
上述医学成像系统100的一个示例可以包括该超声系统,图2示出了根据各种实施方案的示例性超声系统200的结构图。该超声系统200具有用于接收环境温度空气212、216的进风口210、220和用于排出暖空气214、218的出风口230,示例性的空气过滤器可以分别设置在上述进风口210、220处。
图3是根据各种实施方案的图2的示例性超声系统100的分解图。图2和图3的超声系统200可与图1的医学成像系统100共享各种特性。参见图2和图3,超声系统200可以包括外壳202、臂284、安装件286、主电子器件210、AC电源箱230、主体空气过滤器240和AC电源箱空气过滤器260。安装件286可被配置成接纳用户输入设备280和/或显示系统282。安装件286可联接到臂284,该臂284从外壳202延伸并且联接到该外壳202。主电子器件210、AC电源箱230、主体空气过滤器240和AC电源箱空气过滤器260可设置在外壳202内。外壳202可包括进风口211、215,环境温度空气201、205通过该进风口211、215被吸入外壳中,穿过邻近进风口211、215定位的空气过滤器240、260,并且流经主体电子器件210或AC电源箱230。暖空气203通过外壳202中的出风口213排出,暖空气207通过外壳202中的另一出风口(图中未示出)排出。例如,环境温度空气201可通过进风口211被吸入,穿过主体空气过滤器240,并且流经主电子器件210。来自主电子器件210的热量可被传递到过滤后的空气,并且暖空气207可通过外壳202中的出风口213排出。主体空气过滤器240可安装在进风口211和主电子器件210之间。又如,环境温度空气205可通过进风口215被吸入,并在经由空气过滤器260过滤后流经AC电源箱230。来自AC电源箱230的热量可传递到过滤后的空气,并且暖空气207可通过外壳202中的出风口(未示出)排出。AC电源箱空气过滤器260可安装在进风口215和AC电源箱230之间。
以上示例虽然可以包括多个进风口和多个空气过滤器,然而,医学成像系统还可以仅设置一个进风口和一个空气过滤器,例如,图1所示的医学成像系统100也可以仅包括用于流通环境温度空气101的进风口和邻近该进风口的空气过滤器140。医学成像系统100的一个或多个风扇(例如风扇120、134)可以引导进入壳体102的环境温度空气101经过一个或多个待冷却的部件(如上述的主电子器件110和AC电源箱130),以对该一个或多个部件进行冷却,并且暖空气通过一个或多个出风口被排出。
图4示出了根据各种实施方案的另一个示例性超声系统400的分解图。图4中的超声系统400可与图1的医学成像系统100共享各种特性。例如,该超声系统400具有用于接收环境温度空气401的进风口411以及用于排出暖空气403的出风口413和/或用于排出暖空气405的出风口415,示例性的空气过滤器500可以设置在上述进风口411处。
参见图4,超声系统400可以包括外壳402、臂484、安装件486和空气过滤器440。安装件486可被配置成接纳用户输入设备480和/或显示系统482。安装件486可联接到臂484。主电子器件(图4中未示出)、AC电源箱(图4中未示出)和空气过滤器440可设置在外壳402内。外壳402可包括进风口411,环境温度空气401通过该进风口411被吸入外壳(超声设备)中,穿过邻近进风口411定位的空气过滤器440,并且流经主体电子器件和/或AC电源箱。暖空气403、405可以分别通过外壳402中的出风口413、415排出。空气过滤器440可安装在进风口411处,具体地,可以安装在进风口和待冷却的部件之间。
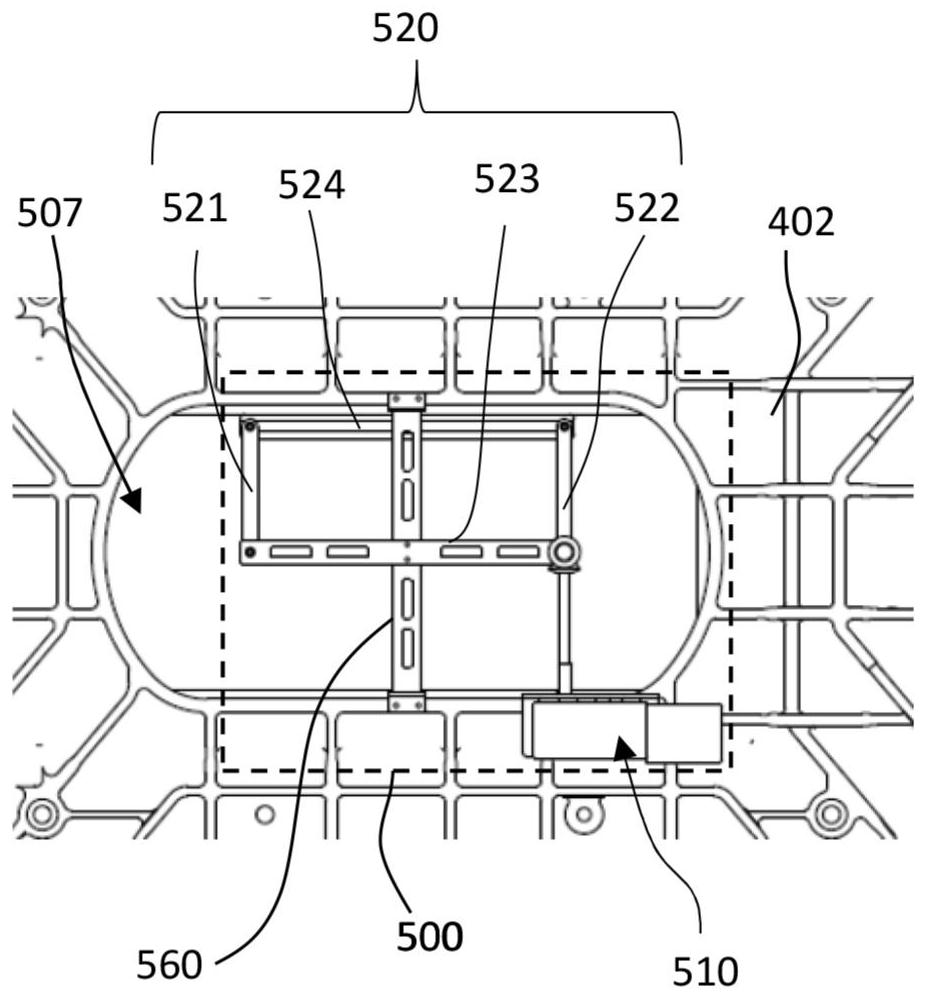
图5示出了根据各种实施方案的示例性的清洁装置500安装在超声系统400中的结构示意图。参考图5,超声系统400的外壳402设有开口507,该开口507例如可以设置在外壳402的底部,以与该进风口411相连通。空气过滤器440跨该开口507被安装,以使得环境温度空气能够经由开口507和空气过滤器440后再进入外壳。清洁装置500安装在外壳402中并经由该开口507与空气过滤器440相对,以清洁空气过滤器440暴露于开口507的部分。
图6示出了根据各种实施方案的示例性的清洁装置500的分解图。参考图5、图6,清洁装置500可以包括驱动组件510、连动组件520和过滤器清洁组件530,连动组件520连接驱动组件510,过滤器清洁组件530设置在连动组件520上,驱动组件510用于驱动该连动组件520运动,进而带动该过滤器清洁组件530整体做平移圆周运动,在该平移圆周运动的过程中,过滤器清洁组件的延伸方向不变。
驱动组件510用于响应接收的控制信号以驱动该连动组件运动,进而带动该过滤器清洁组件530相对空气过滤器440(或空气过滤器140、160、24、260)运动来对该空气过滤器440进行清洁,过滤器清洁组件530的延伸轴539上每一点的运动轨迹形成一个圆的至少一部分或多个重复的圆的至少一部分,且该延伸轴539在该运动的任意时刻沿第一延伸方向(如箭头581所示)延伸。
在一个示例中,每一点的运动轨迹的长度可以为N*P,其中P为上述圆周的周长,N为大于0的数,N可以为自然数或小数,例如,可以是1、0.8、2、1.6、3.5等等)
在另一个示例中,每一点的运动可以沿着部分圆周(例如半圆或3/4圆)进行往复运动。
在另一个示例中,每一点的运动可以沿着部分圆周(例如半圆或3/4圆)进行顺时针或逆时针运动,例如,第一次启动清洁装置500时,过滤器清洁组件顺时针运动半圈或3/4圈后停止,再次启动清洁装置500时,从上次的停止位置继续顺时针旋转半圈或3/4圈。
在另一个示例中,每一点的运动可以沿着整个圆周进行往复运动,例如,将过滤器清洁组件530正转一圈再反转一圈,如此重复一次或多次。这样的重复可以是在执行同一次清洁任务时进行,也可以是在多个具有时间间隔地清洁任务下分次完成。
在另一个示例中,每一点的运动可以沿着整个圆周进行顺时针或逆时针运动,例如,第一次启动清洁装置500时,过滤器清洁组件530顺时针运动一圈或多个整数圈后停止,再次启动清洁装置500时,再次顺时针运动一圈或多个整数圈。
上述多个重复的圆,可以是过滤器清洁组件进行上述任何往复运动或顺时针、逆时针转动形成的多个轨迹所在的圆。
过滤器清洁装置整体做平移圆周运动时,其每个部分(或每个点)的运动是同步的,例如,具有相同的运动方向、速度和角速度。
图7示出了过滤器清洁组件的运动轨迹的一个示例,例如,过滤器清洁组件530(以延伸轴539示出)从位置w0开始依次经过位置w1-w8之后回到位置w0。其中,过滤器清洁组件530具有沿第一延伸方向的延伸部分,并且在运动的过程中,该第一延伸方向始终不变。以过滤器清洁组件530两端的两个点531和532为例,该两个点531和532各自的运动同步进行,并分别形成圆形的运动轨迹533和534。圆形轨迹533和534的两个圆心之间的连线始终是沿着第一延伸方向的。因此,过滤器清洁组件530整体上可以遍历该轨迹533和534所在的一个清洁区域,该清洁区域是连续的,其至少包含一个中间部分535和两个位于中间部分两侧的弧形部分536。基于该过滤器清洁组件530的整体轮廓(或形状),该区域可以具有其它变化的形状。
开口507的形状可以被设置为与上述清洁区域相适应,作为一个示例,开口507的的形状也可以包括一个中间部分和两个位于中间部分两侧的弧形部分。
参考图5、图6,该连动组件520包括第一曲柄521、第二曲柄522、支架523和安装架524。该第一曲柄521、支架523、第二曲柄522和安装架524依次相连形成平行四边形的连动结构,例如,该第一曲柄521、支架523、第二曲柄522和安装架524依次铰接或可活动地连接,且其中心轴分别形成平行四边形。具体地,第一曲柄521和第二曲柄522被相对设置且互相平行,支架523和安装架524被相对设置且互相平行。
支架523用于相对于医学成像系统被固定,例如,支架523可以在水平方向横跨开口507并安装在外壳402上,具体地,支架523的两端可以分别沿水平方向延伸后安装在开口507侧缘处。或者,支架523安装在限位架560上,这种方式将在下文结合对限位架560的描述进行说明。
其它实施例中,外壳402也可以用于支架523,以直接与第一曲柄和第二曲柄铰接或可活动地连接。
安装架524用于安装上述过滤器清洁组件530,当第一曲柄521和第二曲柄522中的任一个被驱动时,第一曲柄521和第二曲柄522中的另一个通过安装架524进行连动。驱动组件510用于与第一曲柄521和第二曲柄522中的至少一个连接,以驱动第一曲柄521和第二曲柄522各自绕其一端转动,并带动安装架524做整体的平移圆周运动。
具体地,第一曲柄521、第二曲柄522、支架523和安装架524分别具有相对设置的第一端和第二端,第一曲柄521的第一端通过第一连接轴621连接支架523的第一端,支架523的第二端通过第二连接轴622连接第二曲柄522的第一端,第二曲柄522的第二端通过第三连接轴623连接安装架524的第一端,安装架524的第二端通过第四连接轴624连接第一曲柄521的第二端。驱动组件510用于与第一连接轴621和第二连接轴622中的至少一个连接,以驱动对应的第一连接轴621和第二连接轴622中的至少一个旋转,并带动对应的第一曲柄521和第二曲柄522绕各自的第一端(或分别绕第一连接轴621和第二连接轴622)旋转。
参考图5、图6,在一种实施例中,驱动组件510包括马达511以及驱动轴513。马达511可以安装在超声系统400的外壳402内。马达511可以连接驱动轴513的第一端,并基于响应控制信号来驱动该驱动轴513旋转,驱动轴513的第二端用于连接上述第一连接轴621,并带动第一连接轴621旋转,进而带动第一曲柄521绕第一连接轴621旋转。
驱动组件510还可以包括齿轮传动组件515,其连接在驱动轴513和第一连接轴621之间,以将驱动轴513的旋转力变换方向后传递至第一连接轴621。
上述齿轮传动组件515可以包括互相啮合的第一斜齿轮517和第二斜齿轮518,其中,第一斜齿轮517与驱动轴513相配合,第二斜齿轮518与第一连接轴621相配合,第一斜齿轮517的中心轴沿第二延伸方向(如箭头582所示)延伸,第二斜齿轮518的中心轴沿第三延伸方向(如箭头583所示)延伸,该第二延伸方向和第三延伸方向互相垂直。基于这样的设置,可以将驱动轴513设置为沿第二延伸方向延伸,将第一连接轴621设置为沿第三延伸方向延伸。应当理解,基于马达511安装位置的不同,上述第二延伸方向还可以与第一延伸方向相同。
在其它实施例中,也可以将驱动轴513和第一连接轴621设置为沿着相同的方向延伸,即将第一连接轴621设置为沿第三延伸方向延伸,此时,无需通过齿轮传动组件515即可直接将驱动轴513的旋转传递到第一曲柄521。
虽然在图5、图6的示例中,驱动轴513与第一连接轴621相配合以驱动第一曲柄521,然而可以理解,驱动轴513也可以与第二连接轴622相配合来驱动第二曲柄522,由于第一曲柄521和第二曲柄522通过安装架524连接,当两者中的其中任一个被驱动时,另一个也随之被驱动。
本发明的各种实施例中,过滤器清洁组件530可以包括过滤器刷或清洁布,过滤器刷、清洁布等可用于抵靠待清洁的空气过滤器的一侧。过滤器清洁组件530还可以无需与空气过滤器抵靠,例如,其可以具有非接触的灰尘吸附功能。
参考图6,安装架524和第一曲柄521之间设有第一弹性部件601,安装架524和第二曲柄522之间设有第二弹性部件602。上述第一弹性部件601和第二弹性部件602用于向安装架524提供压力,以使安装架524上的过滤器清洁组件530能够充分作用(例如接触、抵靠等)于待清洁的空气过滤器。上述第一弹性部件601和第二弹性部件602可以分别包括套设在第四连接轴624和第三连接轴623外的压缩弹簧。
参考图5、图6,该清洁装置500还包括限位组件540和限位架560,限位架560可以安装在外壳402上,限位架560具有沿第二延伸方向(如箭头582所示)的延伸部分,该第二延伸方向与第一延伸方向(支架523的延伸方向)相垂直。具体地,限位架560可以在第一延伸方向上横跨开口507并且其两端分别经由安装件561安装在开口507的侧缘上。限位架560和支架523中的每个在其中心位置与另一个连接。例如,限位架560和支架523互相连接形成“十”字形,且该“十”字形的交点位置位于该“十”字形的中心。
限位组件540被设置为与安装架524相配合并能够沿上述第一延伸方向在第一曲柄521和第二曲柄522的第二端之间移动。限位组件540还被设置为与限位架560相配合并能够沿第二延伸方向移动。通过这种方式,确保第一曲柄521和第二曲柄522同步旋转,避免出现曲柄随意摆动。
具体地,该限位组件540可以包括互相连接的第一滑动件541和第二滑动件542,该安装架524上设有用于与第一滑动件541配合的滑动轨道543,该限位架560上设有与第二滑动件542配合的滑动轨道544。该滑动件和滑动轨道的一个示例可以包括滑块和滑槽。
上述限位组件540用于在安装架524被驱动的过程中限定其位置,进而限定其上安装的过滤器清洁组件530的运动轨迹。
虽然图6中的示例中采用限位组件,然而,可以采用其它任何方式来实现曲柄的同步运动,例如,可以采用驱动组件510来驱动第一曲柄521,并采用额外的驱动组件来驱动第二曲柄522,只要对两个驱动组件进行同步设置即可。
参考图8,示出了连动组件520从如图5所示的起始位置运动至多个不同位置(其中的第一曲柄和第二曲柄转动了不同的角度)时的状态图。其中,用弧线示意性地示出了安装架524经历的轨迹。安装架524在每个位置处都是沿水平方向延伸而非倾斜,双曲柄每旋转一圈,安装架524及其上的过滤器清洁组件530可以经历一个较大范围的清洁区域。
以上示例中,虽然揭示了平面的清洁区域,然而,当待清洁的表面为曲面或凹凸状时,可以相应地改变过滤器清洁组件或其所在的安装件的形状,或者将过滤器清洁组件设置为具有弹性形变能力。
进行产品设计时,可以确定双曲柄结构的尺寸或者过滤器清洁组件530的尺寸,以匹配待清洁的空气过滤器的尺寸。
清洁装置500可被配置成响应于从空气过滤器处理器114接收到控制信号,而自动清洁过滤器。例如,控制信号可启动马达511。马达511可被配置成驱动双曲柄机构中的曲柄绕其一端做平移圆周运动,以使设置在曲柄另一端的连杆整体上进行平移圆周运动并经历清洁区域,上述连杆用于承载过滤器清洁组件530,并且,清洁区域与过滤器的待清洁表面相对或重合,使得过滤器清洁组件530随连杆运动的过程中作用于过滤器以对过滤器进行清洁,例如,使灰尘和其他颗粒从过滤器脱离,从而在没有用户干预的情况下(即,自动地)清洁过滤器。由空气过滤器处理器114提供的控制信号可在预定时间量内提供给马达511,该预定时间量足以在关闭马达之前清洁过滤器。
本发明的各种实施例中,空气过滤器处理器114还用于接收来自清洁装置500的状态反馈信号,并基于该状态反馈信号判断对空气过滤器进行清洁任务已完成,进而控制清洁装置500停止工作,即停止该清洁任务。
具体地,该状态反馈信号可以包括来自于马达511在当前清洁任务下的转动量,当该转动量达到预设值时,空气过滤器处理器114判断清洁装置已完成一次清洁任务。上述转动量的预设值可以基于过滤器清洁组件530从清洁区域的起点运动到终点所需的马达的转动量来设置,例如,可以基于过滤器清洁组件530转动一圈所需的马达的转动两来设置转动量的预设值。
图9示出根据各种实施方案的示例性步骤902至910的流程图900,该示例性步骤可用于基于医学图像系统100(例如包括超声系统200/400)通电的时间量来自动清洁医学成像系统100的空气过滤器。
在步骤902处,使医学成像系统100通电。例如,用户可翻转开关、按下按钮、插入电源线等,以打开医学成像系统100。医学成像系统100的通电使AC电源箱130接收交流电(AC)功率,该交流电(AC)功率由AC/DC转换器转换为用于为医学成像系统100部件供电的直流电(DC)。
在步骤904处,计数器118递增以跟踪医学成像系统100通电的时间量。例如,计数器118可包括合适的逻辑、电路、接口和/或代码,该逻辑、电路、接口和/或代码可操作以跟踪医学成像系统100通电的时间量。计数器118可被配置成当医学成像系统100通电时连续递增,直到医学成像系统100断电。
在步骤906处,医学成像系统100的空气过滤器处理器114可以确定医学成像系统100已经通电的时间量是否在预定阈值内。例如,空气过滤器处理器114可被配置成连续地或周期性地监测计数器118,以确定医学成像系统100的当前通电时间何时超过预定阈值。预定阈值可由制造商、供应商、用户等设定。例如,预定阈值可为7天、30天、60天或任何合适的时间量。如果空气过滤器处理器114确定尚未超过预定阈值,则该过程可返回到步骤904。如果空气过滤器处理器114确定已经超过预定阈值,则该过程继续到步骤908。
在步骤908处,医学成像系统100的空气过滤器处理器114可以发送控制信号以启动空气过滤器的清洁装置500,从而自动清洁空气过滤器。例如,空气过滤器处理器114可被配置成将控制信号发送到清洁装置500的驱动组件510。驱动组件510连接有连动组件520,连动组件520用于安装过滤器清洁组件530,驱动组件510用于驱动该连动组件520运动,进而带动该过滤器清洁组件530整体做平移圆周运动,在该平移圆周运动的过程中,过滤器清洁组件的延伸方向不变。过滤器清洁组件530被设置为与待清洁的空气过滤器相对或接触,以在运动的过程中对空气过滤器进行清洁。
在步骤910处,医学成像系统100的空气过滤器处理器114可以重置计数器118。例如,计数器118可被重置,并且过程返回到步骤704,其中计数器118开始递增以跟踪医学成像系统100自重置发生以来已通电的时间量。
图10是示出根据各种实施方案的示例性步骤1002至1008的流程图700,该示例性步骤可用于基于检测到的空气流动特性来自动清洁医学成像系统100的空气过滤器。
在步骤1002处,使医学成像系统100通电。例如,用户可翻转开关、按下按钮、插入电源线等,以打开医学成像系统100。医学成像系统100的通电使AC电源箱130接收交流电(AC)功率,该交流电(AC)功率由AC/DC转换器转换为用于为医学成像系统100部件供电的直流电(DC)。
在步骤1004处,医学成像系统100的空气过滤器处理器114可以监测由传感器152、172感测的空气流动特性。例如,定位在空气过滤器处的传感器1可检测空气流动特性,并将该空气流动特性提供给空气过滤器处理器114。空气流动特性可包括穿过空气过滤器1的质量流速、跨空气过滤器1的压降或任何合适的空气流动特性。传感器1可以是质量流速传感器、压差传感器或任何合适的传感器。
在步骤1006处,医学成像系统100的空气过滤器处理器114可以确定空气流动特性是否在预定阈值内。例如,空气过滤器处理器114可以连续地或周期性地监测由传感器提供的空气流动特性,以确定医学成像系统100的一个或多个空气过滤器的空气流动特性何时在预定阈值之外。预定阈值可由制造商、供应商、用户等设定。例如,预定阈值可以是最小质量流速、最大压降或空气流动特性的任何合适值。如果空气过滤器处理器114确定特定空气过滤器的空气流动特性未落在与特定空气过滤器相关联的预定阈值之外,则过程返回到步骤1004。如果空气过滤器处理器114确定特定空气过滤器的空气流动特性落在与特定空气过滤器相关联的预定阈值之外,则过程继续到步骤1008。
在步骤1008处,医学成像系统100的空气过滤器处理器114可以发送控制信号以启动清洁装置500,从而自动清洁一个或多个空气过滤器。例如,空气过滤器处理器114可被配置成将控制信号发送到医学成像系统100的一个或多个空气过滤器。医学成像系统100的空气过滤器处理器114可以发送控制信号以启动空气过滤器的清洁装置500,从而自动清洁空气过滤器。例如,空气过滤器处理器114可被配置成将控制信号发送到清洁装置500的驱动组件510。驱动组件510连接有连动组件520,连动组件520用于安装过滤器清洁组件530,驱动组件510用于驱动该连动组件520运动,进而带动该过滤器清洁组件530整体做平移圆周运动,在该平移圆周运动的过程中,过滤器清洁组件的延伸方向不变。过滤器清洁组件530被设置为与待清洁的空气过滤器相对或接触,以在运动的过程中对空气过滤器进行清洁。
参考图11,示出根据各种实施方案的示例性步骤的流程图1100。在步骤1102处,监测至少一个空气过滤器的操作条件。步骤1104处,确定该操作条件不在预定阈值内。步骤1106处,向该至少一个清洁装置提供该控制信号。
在可选实施例中,还可以包括步骤1108-1112。在步骤1108中,接收来自至少一个清洁装置500的状态反馈信号。步骤1110中,基于该状态反馈信号确定对至少一个空气过滤器的清洁任务已完成。在步骤1112中,响应于对该至少一个空气过滤器的清洁任务已完成,控制该至少一个清洁装置500停止工作。
参考图12,示出根据各种实施方案的示例性步骤的流程图1200。在步骤1202处,监测至少一个空气过滤器的操作条件。步骤1204处,确定该操作条件不在预定阈值内。步骤1206处,确定至少一个清洁装置500的驱动组件510前次对连动组件520进行驱动的驱动方向;步骤1208处,向该至少一个清洁装置提供控制信号,该控制信号用于控制驱动组件沿前次驱动方向的反方向驱动该连动组件。
通过这种方式,避免由于连动组件的运动误差造成运动死点,该运动死点的一个示例可以包括:由于第一曲柄和第二曲柄在停止旋转而失去惯性时,其延伸轴在同一直线上,而无法再次被驱动。
在可选实施例中,还可以包括步骤1114-1112。在步骤1108中,接收来自至少一个清洁装置500的状态反馈信号。步骤1110中,基于该状态反馈信号确定对至少一个空气过滤器的清洁任务已完成。在步骤1112中,响应于对该至少一个空气过滤器的清洁任务已完成,控制该至少一个清洁装置500停止工作。
在示例性实施方案中,上述各实施例的方法可包括由至少一个风扇将空气经由至少一个进风口吸入外壳中。方法900、1000可包括由至少一个风扇使空气穿过至少一个空气过滤器。上述各实施例的方法还可包括由至少一个风扇使空气经过设置在外壳内的电子器件。上述各实施例的方法还可包括由至少一个风扇从至少一个出风口排出空气。
上述各实施例的方法还的一些方案可省略一个或多个步骤,和/或以与所列顺序不同的顺序执行步骤,和/或组合下文讨论的某些步骤。例如,在某些实施方案中可能不执行一些步骤。又如,某些步骤可能以与下面所列时间顺序不同的时间顺序执行,包括同时执行。
各种实施例提供一种医学成像系统的空气过滤器的清洁装置,包括驱动组件510、连动组件520和过滤器清洁组件530。过滤器清洁组件530安装在连动组件520上,驱动组件510用于响应接收的控制信号以驱动连动组件520运动,进而带动过滤器清洁组件530相对空气过滤器运动来对该空气过滤器进行清洁,过滤器清洁组件530的延伸轴539上每一点的运动轨迹形成一个圆的至少一部分或多个重复的圆的至少一部分,且该延伸轴539在该运动的任意时刻沿第一延伸方向延伸。
各种实施例提供一种医学成像系统的空气过滤器的清洁装置,包括:驱动组件510、连动组件520和过滤器清洁组件530。连动组件520包括第一曲柄521、第二曲柄522以及安装架524,第一曲柄521和第二曲柄522的中心轴被设置为互相平行,第一曲柄521、第二曲柄522以及安装架523分别包括第一端和第二端,安装架523的第一端和第二端分别与第一曲柄521的第二端和第二曲柄522的第二端铰接。过滤器清洁组件530安装在安装架523上。驱动组件510连接第一曲柄521和第二曲柄522中的至少一个,驱动组件510用于响应接收的控制信号以驱动连动组件的第一曲柄521和第二曲柄522各自绕其第一端旋转,并带动该过滤器清洁组件530相对空气过滤器运动来对空气过滤器进行清洁。
一种实施例中,连动组件包括第一曲柄521,第二曲柄522、支架523和安装架524,所述第一曲柄521、支架523、第二曲柄522和安装架524依次铰接,例如形成平行四边形,过滤器清洁组件530安装在安装架524上,驱动组件510用于与第一曲柄521和第二曲柄522中的至少一个连接,以驱动第一曲柄521和第二曲柄522绕各自的第一端旋转,并带动安装架524及其上的过滤器组件530运动。
一种实施例中,该支架523用于相对于该所述医学成像系统的外壳被固定,或者,该支架包括该外壳的一部分。
一种实施例中,第一曲柄521的第一端通过第一连接轴621连接支架523的第一端,支架523的第二端通过第二连接轴622连接所述第二曲柄522的第一端,驱动组件510用于与第一连接轴621和第二连接轴622中的至少一个连接,以驱动对应的第一连接轴621和第二连接轴622中的至少一个旋转,并带动对应的第一曲柄521和第二曲柄522绕各自的第一端旋转。
一种实施例中,驱动组件510包括马达511和驱动轴513,驱动轴513的第一端用于连接第一连接轴621,马达511连接驱动轴513的第二端,马达511用于响应该控制信号以驱动驱动轴513旋转,并带动第一连接轴621旋转。
一种实施例中,驱动组件510还包括连接在驱动轴513和第一连接轴621之间的齿轮传动组件515,其用于将驱动轴513的旋转力变换方向后传递至第一连接轴621。
一种实施例中,安装架524和第一曲柄521之间设有第一弹性部件601,安装架和第二曲柄522之间设有第二弹性部件602。
一种实施例中,在该平移圆周运动的过程中,所述过滤器清洁组件530的延伸方向不变。
一种实施例中,支架523被设置为沿第一方向延伸,清洁装置500还包括限位架560和限位组件540,限位架560被设置为沿第二延伸方向的延伸,第一延伸方向和第二延伸方向互相垂直,限位组件540被设置为与安装架530相配合以沿第一延伸方向移动,限位组件540还被设置为与限位架560相配合以沿第二延伸方向移动。
一种实施例中,限位架560和支架523中的每个在其中心位置与另一个连接。
一种实施例中,过滤器清洁组件530用于遍历一个清洁区域,清洁区域至少包括一个中间部分535和分别连接中间部分535的两侧的两个弧形部分536。
各种实施例还提供一种医学成像系统,包括外壳101、202、402,该外壳101、202、402具有至少一个进风口和至少一个出风口。该系统还包括设置在该至少一个进风口和至少一个出风口之间的至少一个空气过滤器140、160、240、260、440。该系统还包括至少一个清洁装置500,其安装在外壳101、202、402上,该至少一个清洁装置500的过滤器清洁组件530被设置为分别与该至少一个空气过滤器140、160、240、260、440相对,以在运动的过程中对该至少一个空气过滤器140、160、240、260、440进行清洁。
一种实施例中,该系统还包括至少一个处理器,例如空气过滤器处理器114,该至少一个处理器被配置成:监测该至少一个空气过滤器140、160、240、260、440的操作条件;确定该操作条件不在预定阈值内;以及,响应于该操作条件不在所述预定阈值内,提供该控制信号。
各种实施例还提供一种医学成像系统的空气过滤器的清洁方法,包括:监测至少一个空气过滤器140、160、240、260、440的操作条件;确定该操作条件不在预定阈值内;以及,向该至少一个清洁装置500提供该控制信号。
一种实施例中,该方法还包括:接收来自至少一个清洁装置500的状态反馈信号;基于该状态反馈信号确定对该至少一个空气过滤器的清洁任务已完成;以及,响应于对该至少一个空气过滤器的清洁任务已完成,控制该至少一个清洁装置500停止工作。
如本文所用,术语“电路”是指物理电子部件(即,硬件)以及可配置硬件、由硬件执行和/或以其他方式与硬件相关联的任何软件和/或固件(“代码”)。例如,如本文所用,当执行一条或多条第一代码时,特定处理器和存储器可包括第一“电路”,并且在执行一条或多条第二代码时,特定处理器和存储器可包括第二“电路”。如本文所用,“和/或”表示列表中的由“和/或”连结的项中的任一个或多个项。例如,“x和/或y”表示三元素集{(x),(y),(x,y)}中的任何元素。作为另一个示例,“x、y和/或z”表示七元素集{(x),(y),(z),(x,y),(x,z),(y,z),(x,y,z)}中的任何元素。如本文所用,术语“示例性”表示用作非限制性示例、实例或例证。如本文所用,术语“例如(e.g.)”和“例如(for example)”引出一个或多个非限制性示例、实例或例证的列表。如本文所用,电路“可操作为”和/或“被配置为”每当该电路包括执行功能的必需硬件和代码(如果需要的话)时就执行该功能,不管是否通过某些用户可配置的设置禁用或不启用该功能的执行。
其他实施方案可提供计算机可读设备和/或非暂态计算机可读介质,和/或机器可读设备和/或非暂态机器可读介质,该计算机可读设备和/或非暂态计算机可读介质和/或该机器可读设备和/或非暂态机器可读介质上存储有机器代码和/或具有可由机器和/或计算机执行的至少一个代码段的计算机程序,从而使机器和/或计算机执行如本文所述的用于自动清洁医学成像系统的空气过滤器的步骤。
因此,本公开可在硬件、软件或硬件和软件的组合中实现。本公开可能以集中方式在至少一个计算机系统中实现,或以分布式方式实现,其中不同的元件分布在若干互连的计算机系统上。适于执行本文所述的方法的任何种类的计算机系统或其他装置都是合适的。
各种实施方案也可嵌入计算机程序产品中,该计算机程序产品包括能够实现本文所述的方法的所有特征,并且当加载到计算机系统中时能够执行这些方法。本文中的计算机程序是指以任何语言、代码或符号表示的一组指令的任何表达,这些指令旨在使具有信息处理能力的系统直接执行特定功能或在以下两项或其中一项之后执行特定功能:a)转换为另一种语言、代码或符号;b)以不同的物质形式进行复制。
虽然已经参考某些实施方案来描述了本公开,但是本领域的技术人员应当理解,在不脱离本公开的范围的情况下,可以进行各种改变并可以替换等同物。另外,在不脱离本公开的范围的情况下,可以进行许多修改以使特定情况或材料适应于本公开的教导。因此,本公开不旨在限于所公开的特定实施方案,而是本公开将包括落入所附权利要求书的范围内的所有实施方案。
- 检测用于核级空气净化装置的高效过滤器的过滤效率的方法
- 用于核级空气净化装置的高效过滤器的过滤效率检测系统
- 用于微粒过滤器清洁的系统和方法
- 用于自动清洁医学成像系统的空气过滤器的方法和系统
- 清洁过滤器以及使用了它的空气清洁装置和空气清洁维持系统