一种适用于方形真空舱的自适应密封结构舱门及操作方法
文献发布时间:2024-01-17 01:17:49
技术领域
本发明涉及卫星整星、推进分系统及推力器部件级真空环境试验、特殊环境试验及检漏试验领域,尤其涉及一种适用于方形真空舱的自适应密封结构舱门及操作方法。
背景技术
目前,方形真空系统以高容纳率、工作效率高及灵活便捷等优点在航天器及其他行业产品真空环境试验、可靠性试验及检漏试验中得到广泛应用,但方形真空系统的结构强度设计与密封舱门设计是一个较大的难题,尤其是受限空间中的方形舱门平移、升降、密封涉及多种机构联合动作,同时要保证开关门及不同位置密封,技术难度较大;另外,方形密封舱门以方形法兰加工及其密封结构设计是面临的技术难题,现有方形真空系统有龙门式舱门、平移式舱门及钟罩式舱门几种,其占地空间大、自由度低,不适用于多种场合密封。
发明内容
为解决现有技术中存在的问题,本发明根据场地及实际工况需要,考虑舱门预紧、升降及平移的自动化控制,实现人性化操作,提供了一种适用于方形真空舱的自适应密封结构舱门及操作方法,通过特殊的结构设计,实现方形真空舱门自适应密封及自动化控制,系统安全可靠,大门密封性能较好。
为实现上述目的,本发明采用如下方案:
本发明提供一种适用于方形真空舱的自适应密封结构舱门,包括密封舱门、方形真空容器、密封气锁、密封圈、升降导轨、支撑框架,其中:
所述方形真空容器设置在所述支撑框架上,所述方形真空容器一面设置有一开口,以垂直于所述开口平面的方向为X轴向,以升降导轨的方向为Y轴向;
所述升降导轨与所述方形真空容器相对固定,所述密封舱门与所述升降导轨配合,可以沿Y轴向移动,靠近或远离所述开口,当所述密封舱门与所述开口距离最近时,所述密封舱门与所述开口在X轴向对齐;
所述密封气锁设置在所述方形真空容器上,当所述密封舱门移动至与所述开口对齐的位置时,所述密封气锁启动,将所述密封舱门沿X轴向压紧在所述开口上;
所述密封圈设置在所述开口四周,当所述密封舱门被压紧时,与其配合,实现密封。
在一些实施例中,本发明还包括以下技术特征:
当所述密封舱门与所述开口距离最近时,所述密封舱门与所述开口在X轴向分离。
还包括连接轴、设置在所述密封舱门远离所述开口一侧的连轴固定座、升降驱动机构,其中,所述连接轴中部与所述连接轴固定座固定连接,所述连接轴端部与所述升降驱动机构固定连接,所述升降驱动机构与所述升降导轨配合,带动所述连接轴沿Y轴向移动。
所述升降驱动机构包括用于提供升降动力的升降气缸、与所述升降导轨配合的升降滑块、与所述升降滑块固定连接的分离弹簧连接件,所述分离弹簧连接件一端与所述升降气缸的活动端固定连接,另一端与一可沿X轴向活动的销轴连接,所述销轴一端与所述分离弹簧连接件活动连接,另一端与所述连接轴固定连接,所述连接轴与所述连接轴固定座固定连接,所述销轴上套设有分离弹簧,所述分离弹簧两端分别与所述连接轴和所述分离弹簧连接件接触,使所述连接轴远离所述分离弹簧连接件。
所述连接轴固定座为至少一个。
所述连接轴与所述销轴通过一十字连接座连接。
其特征在于,所述升降导轨为两根,所述升降驱动机构为两个,分别与两根所述升降导轨配合。
所述密封气锁为四个,其中两个设置在所述开口一侧,另外两个设置在所述开口另一侧。
还包括限位装置,所述限位装置设置在所述升降导轨两端,用于对所述密封舱门的活动进行限位。
本发明还提供一种舱门操作方法,用于上述适用于方形真空舱的自适应密封结构舱门,包括以下步骤:
步骤1:初始状态检查;所述密封舱门初始位置位于所述升降导轨底部,通过限位装置定位下限位置;驱动气缸处于初始状态,分离弹簧处于自由状态,密封气锁处于自由状态,密封圈在方形真空容器内定位处于未压缩状态,其余部件均紧固状态;
步骤2:舱门上升;启动驱动气缸装置,根据上升下降时间要求设置气缸升降速度,系统按照气缸移动速率上升到限位装置的上限位置,密封舱门与方形真空容器处于上下左右对齐状态,密封舱门密封面与方形真空容器密封面在X方向保持一定距离;
步骤3:舱门预紧;开启密封气锁装置,密封气锁将密封舱门与方形真空容器压紧,此时驱动气缸装置与密封气锁装置处于自锁状态,保持压力状态;
步骤4:舱门密封及真空试验,根据试验条件方形真空容器配置的真空系统抽真空并密封,完成相应试验;
步骤5:舱门分离;真空试验完成后,关闭释放密封气锁装置,分离弹簧从压紧状态变成自由释放状态,驱动密封舱门与方形真空容器分开;
步骤6:舱门下降复位;驱动密封舱门与方形真空容器分离后,驱动气缸自锁状态解除,根据设置的升降速率匀速下降至限位装置的下限位,驱动气缸恢复至初始状态。
本发明的有益效果是:
本发明主要为了解决受限空间中方形真空容器密封舱门平移、升降不同状态下密封结构设计的难题,也最大限度留出试验产品真空试验有效空间,便于自动化及人性化操作。由于该容器为方形真空容器,结构强度设计与加工难度较大,同时耐受正压与真空环境条件,且系统高真空度条件下工作要求;与此同时,方形真空容器要实现方形容器变容和移动,需要设计相应的可移动密封舱门,系统构型复杂;系统要求清洁无油且具备光学试验通道,本发明研制了一种适用于方形真空舱的自适应密封,通过特殊的结构设计,实现方形真空舱门自适应密封及自动化控制,系统安全可靠,大门密封性能较好,解决了受限空间航天器产品真空试验方形舱门平移、升降及多状态下密封的难题。
附图说明
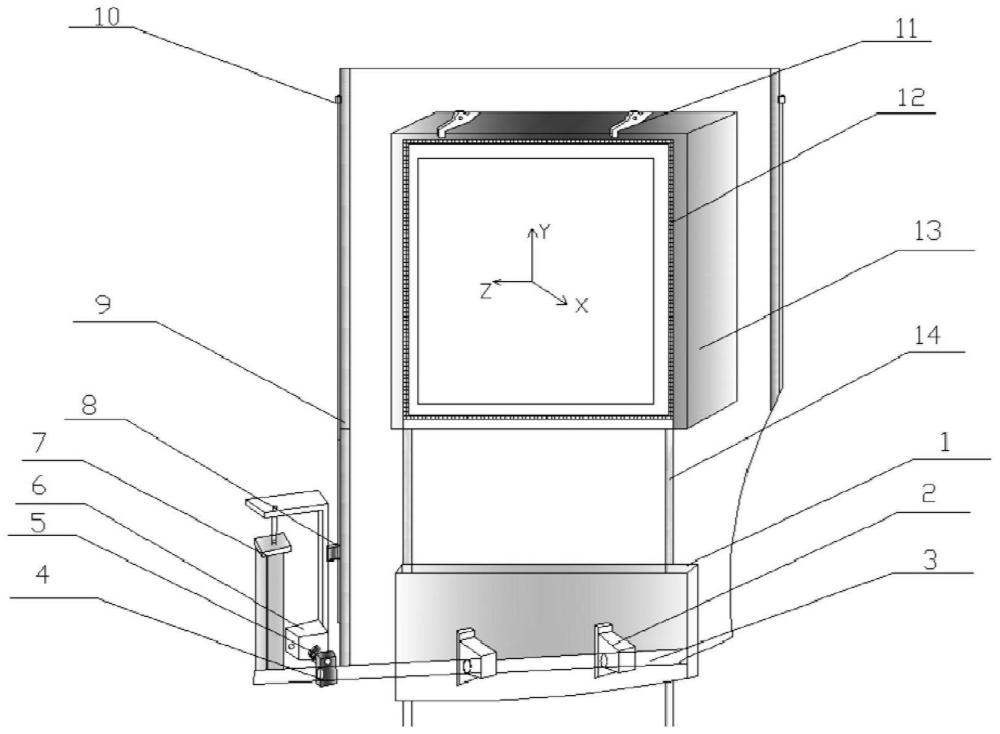
图1为本发明实施例结构示意图;
图中:1-密封舱门、2-连轴固定座、3-连接轴、4-十字连接座、5-分离弹簧、6-驱动气缸及分离弹簧连接件、7-驱动气缸、8-升降滑块、9升降导轨、10-限位装置、11-密封气锁、12-密封圈、13-方形真空容器、14-支撑框架。
具体实施方式
为使本发明技术方案和优点更加清楚,下面将结合本发明中的附图对本发明实施例的技术方案进行完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
如图1所示,密封舱门需要在高度方向(Y)移动,同时在横向方向(X)上预紧、密封及分离等横向移动。高度方向在支撑框架两侧配置两重升降导轨,由两套气缸推杆装置驱动舱门在高度平稳移动,移动方向控制系统自动控制,并设置有到位安全机械限位装置。由于舱门既要上下移动又要压紧密封时,故需要一定X方向的活动量,故在舱门X方向的固定轴(分离弹簧连接件)上安装一套短行程的光轴滑块结构并配有分离弹簧,在门锁打开时,舱门板会远离方形真空容器一定的距离,这样舱门在升降过程中不会有干涉,当舱门板需要和方形真空容器进行密封时,关闭气锁锁紧装置使分离弹簧压缩,气锁关闭时,压紧在分离门板上,分离门板通过十字连接座压缩弹簧沿X轴方向压紧密封,保证舱门和方形真空容器的紧密贴合并密封。方形真空容器和舱门对接法兰处设置4套密封气锁,如图1所示,在方形真空容器上方设置两套,在其底部对称位置也设置有两套,自动控制其锁紧或松开,锁紧机构小巧且美观。
所述密封舱门1连接在连轴固定座2上;连接轴3连接在连轴固定座2与十字连接座4上、十字连接座4通过销轴上套分离弹簧5与驱动气缸及分离弹簧连接件6连接;驱动气缸及分离弹簧连接件6一端与驱动气缸7固定连接,另一端与升降滑块8紧固连接,升降滑块8间隙配合连接在升降导轨9上,升降导轨9的顶端及低端安装限位装置10。升降导轨9、驱动气缸7及方形真空容器13固定连接在支撑框架14上,4套密封气锁11固定在方形真空容器13上,密封圈12按真空设计标准镶嵌在方形真空容器13法兰面梯形槽内,具体连接示意图如附图1所示。
上述密封舱门、方形真空容器、连轴固定座、十字连接座、分离弹簧、驱动气缸及分离弹簧连接件、升降滑块、升降导轨、限位装置均为304不锈钢材料,连接轴为45#钢,支撑框架、驱动气缸、密封气锁均为普通碳钢材料,密封圈为氟橡胶材料。
上述密封舱门法兰密封面及方形真空容器密封槽底面光洁度不大于1.6,考虑到密封面及密封槽焊接过程中法兰局部受热产生大的热应力会产生形变要增加了0.4mm~0.6mm的密封圈形变量。密封圈压缩率一般为15%~30%,渗透率小于10
上述驱动气缸按0.3MPa~0.5MPa的驱动压力计算,计算驱动力S=F/P,根据密封舱门重量选定80气缸两台。
上述分离弹簧选择标准的不锈钢弹簧,根据销轴直径选择线径不小于1.6mm的不锈钢弹簧,弹簧外径20mm~40mm,螺距一般6.7mm。
该装置通过下述步骤进行方形真空容器舱门移动、升降、预紧、密封及真空试验测试:
步骤1:初始状态检查;舱门初始位置位于升降导轨底部(9),如图1所示状态,通过限位装置(10)定位;驱动气缸(7)也处于初始状态,分离弹簧(5)处于自由状态,密封气锁(11)处于自由状态,密封圈(12)在方形真空容器(13)内定位处于未压缩状态,其余部件均紧固状态。
步骤2:舱门上升;启动2套驱动气缸装置(7),根据上升下降时间要求设置气缸升降速度20cm/min,系统按照气缸移动速率上升到限位装置(10)的上限位置,密封舱门(1)与方形真空容器(13)处于上下左右对齐状态,密封舱门(1)密封面与方形真空容器(13)密封面在X方向约5mm距离;
步骤3:舱门预紧;开启4套密封气锁(11)装置,密封气锁将密封舱门(1)与方形真空容器(13)压紧,此时2套驱动气缸装置(7)与4套密封气锁(11)装置处于自锁状态,保持压力状态;
步骤4:舱门密封及真空试验,根据试验条件方形真空容器(13)配置的真空系统抽真空并密封,完成相应试验;
步骤5:舱门分离;真空试验完成后,关闭释放4套密封气锁(11)装置,分离弹簧(5)从压紧状态变成自由释放状态,驱动密封舱门(1)与方形真空容器(13)分开;
步骤6:舱门下降复位;驱动密封舱门(1)与方形真空容器(13)分离后,驱动气缸(7)自锁状态解除,根据设置的升降速率匀速下降至限位装置(10)的下限位。驱动气缸恢复至初始状态。
本发明具备如下有益效果:
1、占用空间小、高容纳率及工作效率高,灵活便捷,便于真空试验时舱门的预紧、升降及平移,克服了受限空间方形密封舱门移动及密封的难题;
2、方形真空容器使用有效空间大,通过特殊的结构设计,实现了方形真空舱门自适应密封及自动化控制;
3、系统安全可靠,实现升降限位及移动到位后的互锁;
4、根据密封舱门机构的重量和动作方式可自适应选择标准的弹簧与驱动机构;
5、大门密封性能较好,不易发生与方形容器法兰面的干涉,舱门密封结构总漏率小于1×10
在本说明书的描述中,参考术语“一个实施例”和“示例”等述意指结合该实施例或示例描述的具体特征、结构或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相对的实施例或示例中以合适的方式结合。
必须指出,以上实施例的说明不用于限制而只是用于帮助理解本发明的核心思想,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,对本发明进行的任何改进以及与本产品等同的替代方案,也属于本发明权利要求的保护范围内。
- 一种飞机起落架轮胎与舱门的密封装置及密封方法
- 一种乘员舱与变速器罩的复合密封结构
- 一种常开式密封结构、真空隔离舱门、真空管道关闭方法
- 一种常闭式密封结构、真空隔离舱门、真空管道连通方法