一种可变磁吸力车轮系统
文献发布时间:2024-01-17 01:18:42
技术领域
本发明涉及爬壁机器人技术领域,尤其涉及的是一种可变磁吸力车轮系统。
背景技术
吸附技术是爬壁机器人在各类壁面开展工作的关键技术之一,不同的壁面采用不同的吸附方式。由于许多应用场景是铁磁体壁面,因此这类爬壁机器人采用磁吸附技术。磁吸附技术分为电磁吸附与永磁吸附,其中永磁吸附具有结构小、吸附力大以及不需要提供额外电源的优点。但现有的爬壁机器人,其永磁吸附的磁力大小不能调节,而吸附力有时会成为爬壁机器人运动的阻力,例如在遇到障碍时较大的吸附力会导致机器人难以脱困,或者在不需要大吸力的路段上行驶时,较大的吸附力会导致机器人功耗较大,降低了机器人的续航能力。
发明内容
本发明的目的在于克服现有技术的不足,提供了一种可变磁吸力车轮系统,以实现车轮在行进过程中能随时调整吸附力大小,以适应各种不同的需求。
本发明是通过以下技术方案实现的:
一种可变磁吸力车轮系统,包括车轮框架,所述车轮框架包括内外设置的轮毂和轮圈,轮毂和轮圈之间通过多个轮辐连接在一起,所述车轮系统还包括磁吸机构以及磁吸力调整驱动机构;
所述磁吸机构包括分别设置在多个轮辐上的多组磁吸组件,每组磁吸组件包括翻转板、永磁体片,翻转板一端通过铰接轴铰接在对应的轮辐上,翻转板另一端为自由端,铰接轴的轴向与轮毂的轴向相平行,永磁体片固定在翻转板的外侧壁上;
通过所述磁吸力调整驱动机构带动各个翻转板绕着各自铰接轴的轴心线翻转,从而调整翻转板及其上的永磁体片与轮圈之间的角度,进而实现整个车轮系统磁吸力大小的调整。
作为上述车轮系统的优选方案,所述磁吸力调整驱动机构包括法兰盘、多个连杆、驱动源,驱动源安装在轮毂内部,法兰盘转动安装在轮毂上且与轮毂同轴心设置,法兰盘上沿周向分布有多个销柱,多个翻转板内侧与多个销柱之间通过多个连杆一一对应的相连接,每个连杆内外两端分别与销柱和翻转板内侧相铰接,通过驱动源带动法兰盘转动,从而通过多个连杆带动多个翻转板翻转。
作为上述车轮系统的优选方案,所述翻转板内侧设有安装块,连杆外端通过销轴与安装块相铰接。
作为上述车轮系统的优选方案,所述驱动源为舵机。
作为上述车轮系统的优选方案,所述翻转板为弧形板,永磁体片为弧形片,永磁体片内侧壁固定在翻转板外侧壁上。
本发明相比现有技术具有以下优点:
本发明提供的一种可变磁吸力车轮系统,其将多组磁吸组件分别铰接在车轮框架的多个轮辐上,通过磁吸力调整驱动机构带动多组磁吸组件翻转,实现多组磁吸组件的内收或外展,从而调整多组磁吸组件的永磁体片与轮圈的角度,进而实现整个车轮系统磁吸力大小的灵活调整,可使车轮系统在行进过程中随时调节吸附力,解决了现有爬壁机器人存在的移动效率低、越障困难等问题,提高了爬壁机器人的移动效率及续航能力。
附图说明
图1是本发明的立体图。
图2是本发明的车轮框架的立体图。
图3是本发明的磁吸机构及磁吸力调整驱动机构相连接的立体图。
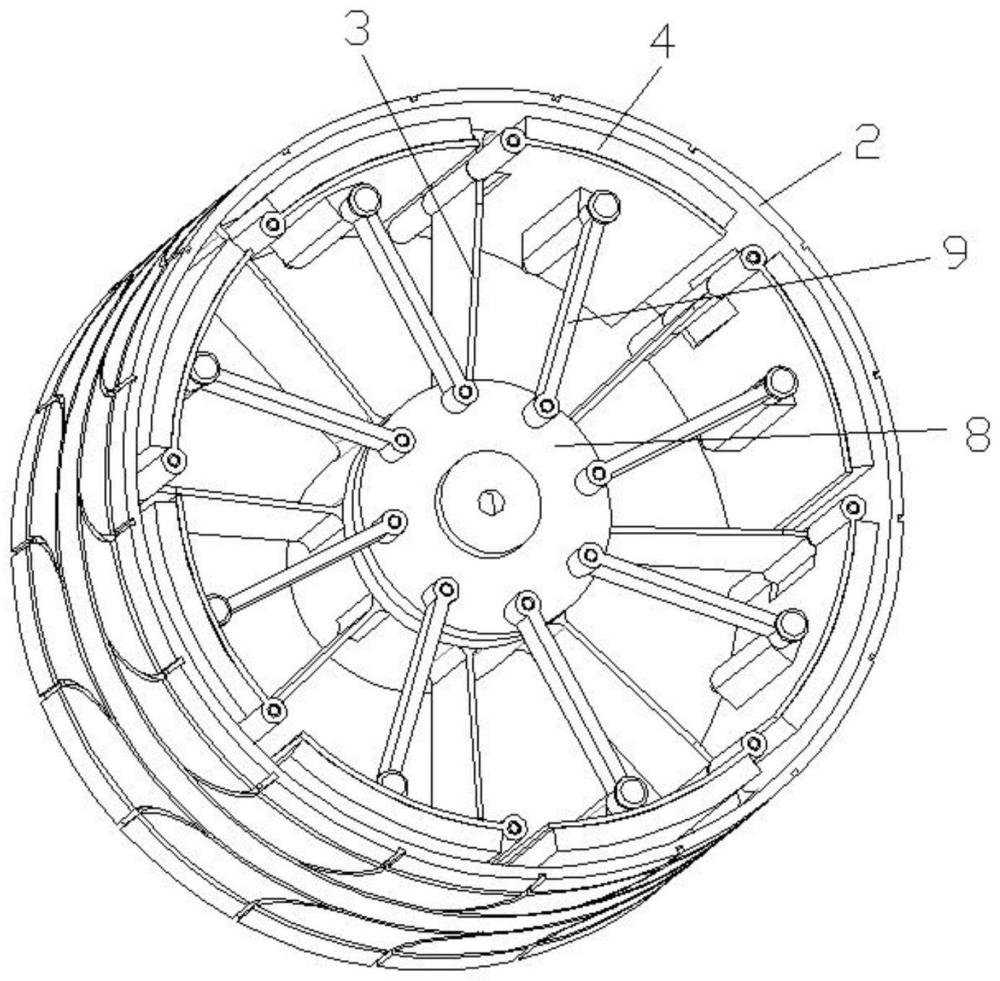
图4是本发明的多组磁吸组件处于内收状态的主视图。
图中标号:1轮毂,2轮圈,3轮辐,4磁吸组件,5翻转板,6永磁体片,7铰接轴,8法兰盘,9连杆,10销柱,11安装块,12销轴。
具体实施方式
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
参见图1至图4,本实施例公开了一种可变磁吸力车轮系统,包括车轮框架,车轮框架包括内外设置的轮毂1和轮圈2,轮毂1和轮圈2之间通过多个轮辐3连接在一起,车轮系统还包括磁吸机构以及磁吸力调整驱动机构。
磁吸机构包括分别设置在多个轮辐3上的多组磁吸组件4,每组磁吸组件4包括翻转板5、永磁体片6,翻转板5为弧形板,翻转板5一端通过铰接轴7铰接在对应的轮辐3上,翻转板5另一端为自由端,铰接轴7的轴向与轮毂1的轴向相平行,永磁体片6固定在翻转板5的外侧壁上,永磁体片6为弧形片,永磁体片6内侧壁固定在翻转板5外侧壁上。
通过磁吸力调整驱动机构带动各个翻转板5绕着各自铰接轴7的轴心线翻转,从而调整翻转板5及其上的永磁体片6与轮圈2之间的角度,进而实现整个车轮系统磁吸力大小的调整。
磁吸力调整驱动机构包括法兰盘8、多个连杆9、驱动源,驱动源安装在轮毂1内部,法兰盘8转动安装在轮毂1上且与轮毂1同轴心设置,法兰盘8上沿周向分布有多个销柱10,多个翻转板5内侧与多个销柱10之间通过多个连杆9一一对应的相连接,每个连杆9内外两端分别与销柱10和翻转板5内侧相铰接,连杆9内端的销孔转动套装在销柱10上;翻转板5内侧设有安装块11,连杆9外端通过销轴12与安装块11相铰接,通过销轴12依次穿过连杆9外端的销孔和安装块11的安装孔,实现连杆9与安装块11的铰接。驱动源可采用舵机,通过驱动源带动法兰盘8转动,从而通过多个连杆9带动多个翻转板5翻转,实现多组磁吸组件4的内收或外展。
当需要调整磁吸力时,由舵机带动法兰盘8转动,法兰盘8带动其上的多个销柱10一起转动,多个销柱10带动多个连杆9动作,从而带动与多个连杆9分别铰接的多个翻转板5绕着各自铰接轴7的轴心线翻转,进而调整多组磁吸组件4的永磁体片6与轮圈2的角度,进而改变车轮对壁面的磁吸力大小,使得车轮系统在行进过程中可随时调节吸附力,解决了现有爬壁机器人存在的移动效率低、越障困难等问题,提高了爬壁机器人的移动效率及续航能力。
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种可变扁平比汽车轮胎系统
- 一种可变扁平比汽车轮胎系统