穿刺机器人主操作手、穿刺活检机器人及其操作方法
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及活体组织检查技术领域,尤其是涉及一种穿刺机器人主操作手、穿刺活检机器人及其操作方法。
背景技术
CT引导下的经皮穿刺手术就是在CT图像的引导下,将穿刺针准确插入人体病灶并能获取病理组织的一种手术,经过病理检测,确定最适合患者的治疗方案,该方法已经成为检测和治疗肿瘤的重要临床方法。
但CT设备的工作原理是通过X射线扫描形成图像的,X射线有较强的辐射,在CT设备旁边完成穿刺手术会让医生长期暴露在辐射环境中,严重影响医生的健康,基于此,使用主从式机器人辅助穿刺系统可以让医生在CT室外的控制室通过主操作手远程控制CT室内的从端机器人来执行穿刺手术,该系统避免将医生暴露在CT辐射中,具有极大的临床意义。
但是,传统主从式机器人辅助穿刺系统在穿刺过程中,无法为医护人员提供力反馈,医护人员无法真实的感受穿刺的阻力,无法更准确的进行手术,容易出现风险。
发明内容
本发明的目的在于提供一种穿刺机器人主操作手、穿刺活检机器人及其操作方法,以缓解了现有技术中存在的传统主从式机器人辅助穿刺系统在穿刺过程中,无法为医护人员提供力反馈,手术容易出现风险的技术问题。
第一方面,本发明提供的穿刺机器人主操作手,包括:模拟穿刺针、姿态调节机构、深度调节机构和主控单元;
所述模拟穿刺针穿设于所述姿态调节机构,所述姿态调节机构配置为能够随着所述模拟穿刺针的摆动沿第一方向和第二方向转动,以检测和控制所述模拟穿刺针的摆动角度;
所述深度调节机构固定于所述姿态调节机构上,所述深度调节机构用于检测和控制所述模拟穿刺针在第三方向上的位移;
所述第三方向为所述模拟穿刺针的轴线方向,且所述第一方向、第二方向和所述第三方向两两相互垂直;
所述主控单元分别与所述姿态调节机构和所述深度调节机构电连接,且所述主控单元与从端机械臂信号连接,所述主控单元用于读取所述模拟穿刺针在第一方向、第二方向的角度变化以及在第三方向上的位移变化,对应控制从端机械臂沿相同方向做相同运动,且所述主控单元用于接收从端机械臂受到的阻力信息,对应控制所述姿态调节机构和所述深度调节机构对所述模拟穿刺针施加反馈阻力。
在可选的实施方式中,
所述姿态调节机构包括操作杆、固定基座、第一方向基座和第二方向基座;
所述操作杆设置为中部贯通结构,用于供所述模拟穿刺针穿行;
所述第一方向基座的两端转动连接于所述固定基座;
所述第二方向基座的两端转动连接于所述固定基座;
所述操作杆与所述第一方向基座转动连接,所述第二方向基座设置有长条孔,所述操作杆穿过所述长条孔,以使所述操作杆能够随同所述第一方向基座围绕所述固定基座沿第一方向转动,所述操作杆能够随同所述第二方向基座围绕所述固定基座沿第二方向转动。
在可选的实施方式中,
所述固定基座设置有用于检测所述第一方向基座沿第一方向的转动角度的第一方向运动计量组件;
所述固定基座设置有用于检测所述第二方向基座沿第二方向的转动角度的第二方向运动计量组件。
在可选的实施方式中,
所述第一方向运动计量组件包括第一磁铁和第一读头;
所述第一磁铁固定于所述第一方向基座的第一转动轴上,所述第一读头固定于所述固定基座上,所述第一读头用于感应所述第一磁铁的角度变化值。
在可选的实施方式中,
所述姿态调节机构还包括第一电机和第一齿轮组;
所述第一齿轮组连接于所述第一方向基座与所述第一转动轴相对设置的第二转动轴上,所述第一电机的驱动端与所述第一齿轮组啮合连接;
所述第一电机设置有用于读取电机端转动角度信息的第一编码器。
在可选的实施方式中,
所述主控单元根据所述第一读头和所述第一编码器的检测信息对应控制从端机械臂运动;
所述主控单元根据从端机械臂受到的阻力信息对应控制所述第一电机,以使所述第一电机通过所述第一齿轮组向所述第一方向基座施加反馈阻力。
在可选的实施方式中,
所述深度调节机构包括穿刺基座、穿刺齿轮组和穿刺电机;
所述穿刺基座固定于所述操作杆上;
所述穿刺齿轮组包括同轴设置且转动连接在所述穿刺基座上的第一穿刺齿轮和第二穿刺齿轮,所述模拟穿刺针设置有齿条段,所述第一穿刺齿轮与所述齿条段啮合连接;
所述穿刺电机的驱动端与所述第二穿刺齿轮啮合连接。
在可选的实施方式中,
所述穿刺基座设置有第三方向运动计量组件,所述第三方向运动计量组件用于检测所述穿刺基座相对于所述模拟穿刺针在第三方向上的位移。
在可选的实施方式中,
所述第三方向运动计量组件包括第三读头和第三磁铁;
所述第三磁铁固定在所述穿刺齿轮组的穿刺转动轴上,所述第三读头固定在所述穿刺基座上,所述第三读头用于感应所述第三磁铁的角度变化值。
在可选的实施方式中,
所述穿刺电机设置有用于读取电机端转动角度信息的第三编码器;
所述主控单元根据所述第三读头和所述第三编码器的检测信息对应控制从端机械臂运动;
所述主控单元根据从端机械臂受到的阻力信息对应控制所述穿刺电机,以使所述穿刺电机通过所述穿刺齿轮组向所述模拟穿刺针施加反馈阻力。
第二方面,本发明提供的穿刺活检机器人,包括所述穿刺机器人主操作手;
所述从端机械臂根据所述主控单元读取的模拟穿刺针的位移变化信息对应带动实际穿刺针做相同运动;
所述从端机械臂设置有六维力传感器,所述六维力传感器用于检测所述从端机械臂受到的阻力,并将阻力信息传递至所述主控单元中。
第三方面,本发明提供的基于所述穿刺活检机器人的操作方法,包括以下步骤:
摆动模拟穿刺针,主控单元读取模拟穿刺针在第一方向和第二方向上的摆动角度变化信息,并控制从端机械臂带动实际穿刺针在第一方向和第二方向上做相同的摆动;
带动模拟穿刺针在第三方向上移动,主控单元读取模拟穿刺针在第三方向上的位移变化信息,并控制从端机械臂带动实际穿刺针在第三方向上做相同运动。
在可选的实施方式中,
还包括以下步骤:计算从端机械臂带动实际穿刺针摆动的安全角度范围,当主控单元读取到的模拟穿刺针在第一方向和第二方向上的摆动角度变化超出安全角度范围时,主控单元控制第一电机和第二电机堵转,以阻止模拟穿刺针的摆动;
计算从端机械臂带动实际穿刺针进针的安全深度范围,当主控单元读取到的模拟穿刺针在第三方向上的位移变化超出安全深度范围时,主控单元控制第三电机堵转,以阻止模拟穿刺针的深入。
本发明提供的穿刺机器人主操作手,在CT室外操作模拟穿刺针,通过姿态调节机构和深度调节机构的设置以检测模拟穿刺针的摆动角度和深度,利用主控单元控制CT室内的从端机械臂做相同动作,完成穿刺手术,从端机械臂受到的阻力信息传递到主控单元中,主控单元根据此阻力信息对应控制姿态调节机构和深度调节机构对模拟穿刺针施加阻力,形成力反馈,降低手术风险和不确定性,使遥操作穿刺的过程更直观准确,手术更加安全,缓解了现有技术中存在的传统主从式机器人辅助穿刺系统在穿刺过程中,无法为医护人员提供力反馈,手术容易出现风险的技术问题。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的穿刺机器人主操作手中模拟穿刺针、姿态调节机构和深度调节机构的结构示意图;
图2为本发明实施例提供的穿刺机器人主操作手中姿态调节机构的结构示意图;
图3为本发明实施例提供的穿刺机器人主操作手中姿态调节机构的结构爆炸图;
图4为本发明实施例提供的穿刺机器人主操作手中姿态调节机构的半剖结构示意图;
图5为本发明实施例提供的穿刺机器人主操作手中姿态调节机构的使用示意图;
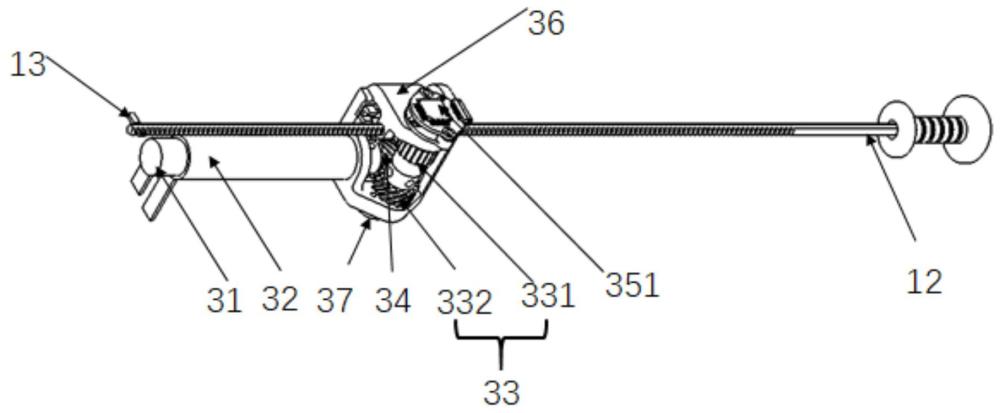
图6为本发明实施例提供的穿刺机器人主操作手中深度调节机构的结构示意图;
图7为本发明实施例提供的穿刺机器人主操作手中深度调节机构另一视角下的结构示意图;
图8为本发明实施例提供的穿刺机器人主操作手中深度调节机构的使用示意图;
图9为本发明实施例提供的穿刺机器人主操作手中外壳主体的结构示意图;
图10为本发明实施例提供的穿刺机器人主操作手中模拟穿刺针的结构示意图。
图标:10-模拟穿刺针;11-针柄;12-针杆;13-防脱块;20-姿态调节机构;21-第一编码器;22-第一电机;23-第一齿轮组;231-转轴齿轮;232-电机锥齿轮;24-操作杆;25-第一方向运动计量组件;251-第一磁铁;252-第一读头;26-第二方向运动计量组件;27-固定基座;28-第二方向基座;29-第一方向基座;30-深度调节机构;31-第三编码器;32-穿刺电机;33-穿刺齿轮组;331-第一穿刺齿轮;332-第二穿刺齿轮;34-斜齿轮;35-第三方向运动计量组件;351-第三读头;352-第三磁铁;36-穿刺基座;37-穿刺转动轴;50-控制面板;52-拨杆;53-状态指示灯;54-急停按钮;60-从端机械臂;70-六维力传感器;80-实际穿刺针。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
传统主从式机器人辅助穿刺系统在穿刺过程中,无法为医护人员提供力反馈,医护人员无法真实的感受穿刺的阻力,无法更准确的进行手术,容易出现风险。
有鉴于此,如图1所示,本实施例提供的穿刺机器人主操作手,包括:模拟穿刺针10、姿态调节机构20、深度调节机构30和主控单元;模拟穿刺针10穿设于姿态调节机构20,姿态调节机构20配置为能够随着模拟穿刺针10的摆动沿第一方向和第二方向转动,以检测和控制模拟穿刺针10的摆动角度。
具体而言,如图2、图3和图4所示,姿态调节机构20包括操作杆24、固定基座27、第一方向基座29和第二方向基座28;操作杆24中部具有贯通孔,形成中部贯通结构,模拟穿刺针10从贯通孔中穿行;第一方向基座29为中部贯通的框架结构,第一方向基座29相对的两侧分别设置有第一转动轴和第二转动轴,第一转动轴和第二转动轴的连线即为第一方向,固定基座27对应第一转动轴和第二转动轴的位置均形成有凹槽,第一转动轴和第二转动轴对应伸入到两个凹槽中,通过转动轴的设置将第一方向基座29转动连接于固定基座27,使第一方向基座29能够围绕第一方向相对于固定基座27转动;同理,第二方向基座28通过转动轴转动连接于固定基座27,使第二方向基座28围绕第二方向相对于固定基座27转动;操作杆24位于第一方向基座29中部贯通区域内,与第一方向基座29转动连接,第二方向基座28设置有长条孔,操作杆24穿过长条孔,当模拟穿刺针10以第一方向为轴做摆动运动时,操作杆24与模拟穿刺针10一同在第二方向运动,第一方向基座29围绕第一方向转动,操作杆24在长条孔内移动,当模拟穿刺针10以第二方向为轴做摆动运动时,操作杆24与模拟穿刺针10一同在第一方向运动,操作杆24贴合长条孔的孔壁推动第二方向基座28围绕第二方向转动,实现将模拟穿刺针10的摆动转换成第一方向和第二方向的运动。
姿态调节机构20还包括第一电机22和第一齿轮组23;第一齿轮组23连接于第一方向基座29与第一转动轴相对设置的第二转动轴上,第一电机22的驱动端与第一齿轮组23啮合连接,具体而言,第一齿轮组23包括转轴齿轮231和电机锥齿轮232,转轴齿轮231固定在与第二转动轴上,电机锥齿轮232固定在第一电机22的驱动端上,电机锥齿轮232与转轴齿轮231相互啮合,转轴齿轮231和电机锥齿轮232的配合更加节省整体装置空间;主控单元根据从端机械臂60受到的阻力信息对应控制第一电机22,第一电机22通过第一齿轮组23为第一方向基座29施加反馈力,为操作杆24沿第一方向的转动施加阻力。
同理,姿态调节机构20还包括第二电机和第二齿轮组,第二电机通过第二齿轮组与第二方向基座28上的转动轴传动连接,主控单元根据从端机械臂60受到的阻力信息对应控制第二电机,第二电机通过第二齿轮组为第二方向基座28施加反馈力,即为操作杆24沿第二方向的转动施加阻力。
如图6、图7所示,深度调节机构30固定于姿态调节机构20上,深度调节机构30用于检测和控制模拟穿刺针10在第三方向上的位移;第三方向为模拟穿刺针10的轴线方向,且第一方向、第二方向和第三方向两两相互垂直。
具体而言,深度调节机构30包括穿刺基座36、穿刺齿轮组33和穿刺电机32;穿刺基座36通过六角螺母固定在操作杆24上,使穿刺基座36与固定基座27为一整体;穿刺齿轮组33包括同轴设置且转动连接在穿刺基座36上的第一穿刺齿轮331和第二穿刺齿轮332,即第一穿刺齿轮331和第二穿刺齿轮332同轴连接,且第一穿刺齿轮331和第二穿刺齿轮332均通过转轴与穿刺基座36连接;模拟穿刺针10设置有齿条段,第一穿刺齿轮331与齿条段啮合连接,穿刺电机32的驱动端连接有斜齿轮34,斜齿轮34与第二穿刺齿轮332啮合连接,斜齿轮34与第二穿刺齿轮332的配合使用更加节省装置整体空间;主控单元根据从端机械臂60受到的阻力信息对应控制穿刺电机32,穿刺电机32通过穿刺齿轮组33为模拟穿刺针10施加阻力,形成反馈阻力,医护人员能感知到实际进针时的阻力。
本实施例提供的穿刺机器人主操作手,在CT室外操作模拟穿刺针10,通过姿态调节机构20和深度调节机构30的设置以检测模拟穿刺针10的摆动角度和深度,利用主控单元控制CT室内的从端机械臂60做相同动作,完成穿刺手术,从端机械臂60受到的阻力信息传递到主控单元中,主控单元根据此阻力信息对应控制姿态调节机构20和深度调节机构30对模拟穿刺针10施加阻力,形成力反馈,降低手术风险和不确定性,使遥操作穿刺的过程更直观准确,手术更加安全,缓解了现有技术中存在的传统主从式机器人辅助穿刺系统在穿刺过程中,无法为医护人员提供力反馈,手术容易出现风险的技术问题。
在可选的实施方式中,固定基座27设置有用于检测第一方向基座29沿第一方向的转动角度的第一方向运动计量组件25,具体而言,第一方向运动计量组件25包括第一磁铁251和第一读头252;第一读头252固定于固定基座27上,第一磁铁251固定于第一方向基座29的第一转动轴上,第一磁铁251会跟着第一方向基座29一起运动,第一读头252能感知到第一磁铁251角度的变化值,即可读取模拟穿刺针10在第一方向角度的变化。
同理,固定基座27设置有用于检测第二方向基座28沿第二方向的转动角度的第二方向运动计量组件26,利用第二方向运动计量组件26感知第二方向基座28的转动角度,即可读取模拟穿刺针10在第二方向角度的变化。
在可选的实施方式中,第一电机22设置有用于读取电机端转动角度信息的第一编码器21,第一编码器21采集第一电机22的电机端的转动角度信息,第一读头252采集输出端的转动角度信息,第一编码器21和第一读头252相互校验,安全性更高,如果只设置第一编码器21或第一读头252存在失效的风险。
如图5所示,图5为姿态调节机构20的使用场景图,主控单元根据第一方向运动计量组件25和第二方向运动计量组件26的检测信息对应控制从端机械臂60运动,即主控单元读取模拟穿刺针10在第一方向、第二方向的角度变化对应控制从端机械臂60沿相同方向做相同运动;当模拟穿刺针10转动θ1角度时,主控单元控制从端机械臂60带动实际穿刺针80转动θ1角。
在可选的实施方式中,穿刺基座36设置有第三方向运动计量组件35,第三方向运动计量组件35用于检测穿刺基座36相对于模拟穿刺针10在第三方向上的位移;具体而言,第三方向运动计量组件35包括第三读头351和第三磁铁352;第三磁铁352固定在穿刺齿轮组33的穿刺转动轴37上,第三读头351固定在穿刺基座36上,第三读头351感应第三磁铁352的角度变化值,即可读取模拟穿刺针10在第三方向的深度变化。
在可选的实施方式中,穿刺电机32设置有用于读取电机端转动角度信息的第三编码器31;主控单元根据第三读头351和第三编码器31的检测信息对应控制从端机械臂60运动;第三编码器31采集第三电机的电机端的转动角度信息,第三读头351采集输出端的转动角度信息,第三编码器31和第三读头351相互校验,安全性更高。
如图8所示,图8为深度调节机构30的使用场景图,模拟穿刺针10深入Z1深度尺寸时,主控单元控制从端机械臂60同样深入Z1深度。
另外,从端机械臂60末端装有一个六维力传感器70,通过六维力传感器70读取实际穿刺针80所受的阻力,主控单元接收从端机械臂60受到的阻力信息,并通过第一电机22、第二电机施加摆动方向上的阻力,第三电机施加深度方向上的阻力。
本实施例中的主控单元,包含电机驱动板,读取主端的动作,控制从端机械臂60做相同的动作,同时通过从端机械臂60上的六维力传感器70读取阻力,将该阻力传递给模拟穿刺针10。
如图10所示,本实施例中的模拟穿刺针10,包括相互连接的针柄11和针杆12,针杆12上设置有齿条段,并且在针杆12远离针柄11的端部设置有防脱块13,防脱块13的尺寸大于操作杆24的贯通孔尺寸,有效避免针杆12从操作杆24中脱出。
如图9所示,还包括有控制面板50,控制面板50罩设深度调节机构30和姿态调节机构20,控制面板50具有通孔,模拟穿刺针10穿过通孔伸入到操作杆24中,控制面板50上设置有拨杆52、状态指示灯53和急停按钮54,拨杆52用于切换方向调整和深度调整模式,急停按钮54用于紧急情况下停止从端机械臂60的动作,状态指示灯53用于显示主操作手的状态,当主操作手正常工作时,亮绿灯,当主操作手有不可恢复的故障时,亮红灯。
本实施例提供的穿刺活检机器人,包括穿刺机器人主操作手;从端机械臂60根据主控单元读取的模拟穿刺针10的位移变化信息对应带动实际穿刺针80做相同运动;从端机械臂60设置有六维力传感器70,六维力传感器70用于检测从端机械臂60受到的阻力,并将阻力信息传递至主控单元中;通过从端机械臂60和穿刺机器人主操作手的相互配合,实现在CT室外完成穿刺手术。
本实施例提供的穿刺活检机器人的操作方法,包括以下步骤:摆动模拟穿刺针10,主控单元读取模拟穿刺针10在第一方向和第二方向上的摆动角度变化信息,并控制从端机械臂60带动实际穿刺针80在第一方向和第二方向上做相同的摆动;带动模拟穿刺针10在第三方向上移动,主控单元读取模拟穿刺针10在第三方向上的位移变化信息,并控制从端机械臂60带动实际穿刺针80在第三方向上做相同运动;还包括以下步骤:计算从端机械臂60带动实际穿刺针80摆动的安全角度范围,当主控单元读取到的模拟穿刺针10在第一方向和第二方向上的摆动角度变化超出安全角度范围时,主控单元控制第一电机22和第二电机堵转,以阻止模拟穿刺针10的摆动;计算从端机械臂60带动实际穿刺针80进针的安全深度范围,当主控单元读取到的模拟穿刺针10在第三方向上的位移变化超出安全深度范围时,主控单元控制第三电机堵转,以阻止模拟穿刺针10的深入。
本实施例提供的操作方法,具有安全调整范围,CT室内,从端机械臂60和病人一起扫CT后,导航定位软件对CT图像重建,图像重建后即可知道从端机械臂60和病灶的相对位置,进而可以计算从端机械臂60需要带着实际穿刺针80调整的角度ΔA和ΔB以及进针的深度ΔZ,ΔA、ΔB和ΔZ就是安全调整范围,当主端的调节位于安全范围内,主操作手可以正常控制从端机械臂60,当主操作手的调节将要超出安全范围时,主操作手的第一电机22、第二电机和第三电机会给操作者施加非常大的阻力,阻止操作者调整模拟穿刺针10,这种控制模式可以防止主操作手非预期的运动对手术安全造成影响。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 用于穿刺手术的力反馈主操作手及穿刺手术机器人系统
- 自动穿刺活检医疗机器人的控制方法、装置及机器人