一种擦窗机器人
文献发布时间:2024-01-17 01:24:51
技术领域
本发明涉及窗户清理技术领域,具体为一种擦窗机器人。
背景技术
随着我国经济的不断发展,各地的办公楼、写字楼等高层建筑林立而起,通常为了增加办公楼、写字楼视野开阔度和降低成本会安装大量的玻璃,虽然这样大大增加了高楼的美观度,但是同时也增加了高楼建筑玻璃的清洁难度,市场上有大量的擦窗机器人。
但是这些擦窗机器人存在以下缺点:
1、这些擦窗机器人基本上都是吸附在玻璃表面进行清洗的,都需要人工安放上才能工作,擦拭完毕后有需要人工拿下才行,操作繁琐,工作效率低下;
2、市场上擦窗的机器人大多都是家用型的,而且每次只能擦一扇窗户,想要擦另一扇窗还要手动去摆放,并不能在擦完一扇窗户后智能地越过窗户的边框来继续擦拭另一扇窗户。
发明内容
针对现有技术的不足,本发明提供了一种擦窗机器人,解决了上述问题。
为实现以上目的,本发明通过以下技术方案予以实现:
一种擦窗机器人,包括:
清洁组件,其用于窗户的表面清洁,其包括:
上部组件,包括支撑板一,所述支撑板一上安装有水箱和气体产生器;
底部组件,其包括支撑板二,所述支撑板二上转动连接有四个清洁刷,所述清洁刷通过驱动组件转动,用于对窗户表面的擦拭,且清洗刷的中心嵌设有喷头,所述喷头与水箱管道连接,用于窗户表面的喷水;
行走支撑组件,其设置在所述清洁组件的四角位置处,包括支腿,所述支腿由多个转动节相互转动组装而成,且两两相邻的转动节的转动点上均设置有舵机二,且支腿的最上端设置有舵机一,所述舵机一安装在支撑板一上,支腿的最底端设置有吸盘,所述吸盘通过软管与气体产生器连接。
优选的,驱动组件,包括支架一,所述支架一上安装有驱动电机一,所述驱动电机一的输出轴与主齿轮一固定连接,且主齿轮一的外部啮合连接有多个从齿轮一,所述从齿轮一与支撑板二转动连接,且从齿轮一的底部与清洗刷固定连接。
优选的,所述上部组件,还包括上盖板,所述上盖板通过螺栓与支撑板一固定连接。
优选的,还包括清洁组件,所述清洁组件包括可在支撑板一底部竖向移动的支架二,所述支架二上固定连接有驱动电机二,所述驱动电机二的输出轴与主齿轮二固定连接,且主齿轮二的外部与从齿轮二啮合,所述从齿轮二与丝杆固定连接,且丝杆在支架二的前后两侧转动,所述丝杆的外部螺旋连接有内螺纹块,所述内螺纹块之间固定连接有刮板。
优选的,所述丝杆的底部设置有导杆,所述导杆的两端与支架二固定连接,且内螺纹块在导杆二上滑动。
优选的,所述支撑板二上固定连接有控制箱,所述控制箱内设置有供电系统和控制系统,其中,所述供电系统包括可充电电池,所述控制系统为带远程控制的CPU处理器,所述处理器与电池电性连接,且处理器分别与驱动电机一、驱动电机二、舵机一和舵机二、气体发生器和水箱的水泵电性连接。
本发明中还提供了一种擦窗机器人的工作步骤,包括:
S10:首先,启动电源,将装置放置在窗户表面,启动行走支撑组件,利用舵机一和舵机二的配合,打开转动节,并带动吸盘接触到窗户边缘四角,启动气体发生器使吸盘内部呈负压状态,使装置吸附在窗户边缘;
S20:调整行走支撑组件的姿态,使底部组件的底部清洁刷接触到窗户外表面,启动驱动电机一,带动清洁刷同步旋转,同时启动水箱的水泵,实现窗户表面喷水清理;
S30:继续调整行走支撑组件的姿态,使清洁组件在窗户外表面滑动,实现窗户表面的清洗;
S40:清洗完成后,启动驱动电机二带动主齿轮二和从齿轮二旋转,进而带动丝杆旋转,带动刮板移动,进而实现对窗户表面的水渍清理,单个窗户清理完成;
S50:一个窗户外表面清洁完成后,调整行走支撑组件,使装置可以沿窗户边框行走,行走到临侧窗户后,重复上述工作,即可实现对大厦窗户整面的清理。
本发明提供了一种擦窗机器人,具备以下有益效果:
1.本发明中,通过设置的本申请提供了一种擦窗机器人,其通过行走支撑组件模拟节制动物的腿部,使装置牢牢吸附在窗户边框上,在清洁组件对窗户表面清洗时,行走支撑组件不会产生松动,因此降低了装置从窗户上脱落的风险,同时行走支撑组件可以模拟节制动物沿窗户边缘行走,解决了一次只能清理一块窗户的问题,并且可以实现转弯,能够灵活地实现玻璃窗的擦拭功能。
2.本发明中,通过设置的清洁组件,当机器人对窗户表面清洁后,启动驱动电机二带动主齿轮二和从齿轮二旋转,进而带动丝杆旋转,带动刮板移动,进而实现对窗户表面的水渍清理,提高窗户表面清洁的质量。
附图说明
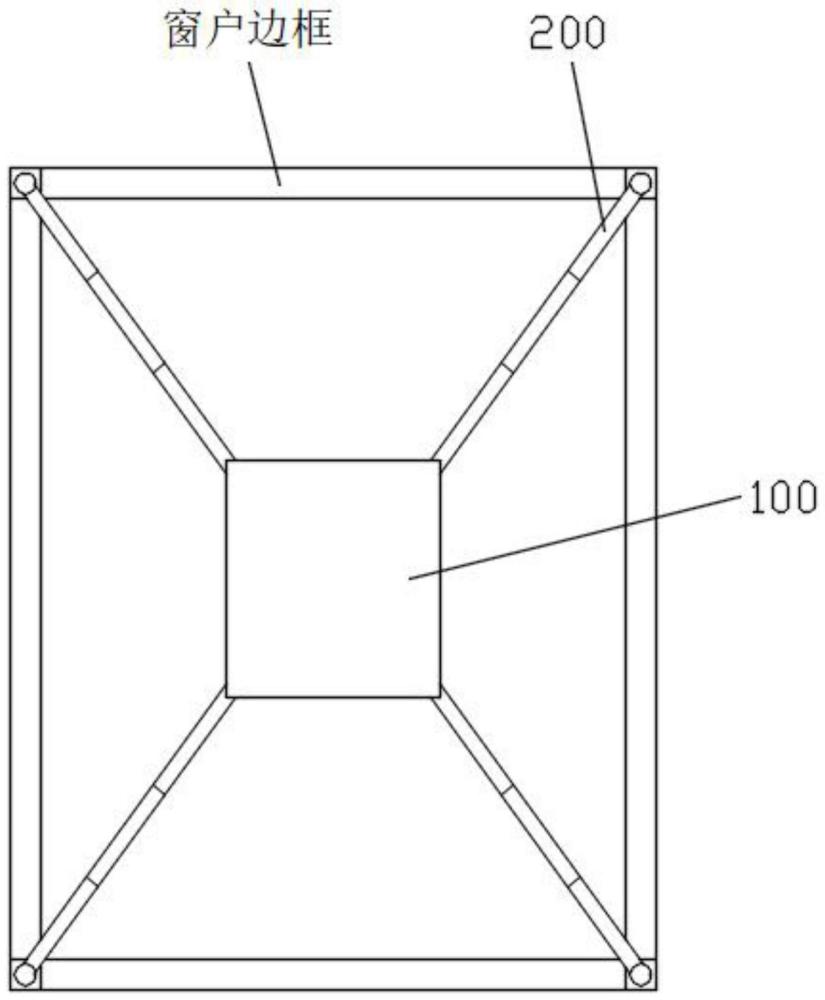
图1为本发明中装置在使用状态下的结构示意图;
图2为本发明中清洁组件的整体结构示意图;
图3为本发明中清洁组件的底部结构示意图;
图4为本发明中清洁组件的正面结构示意图;
图5为本发明中底部组件的结构示意图;
图6为本发明中主齿轮一和从齿轮一连接结构示意图;
图7为本发明中清洁刷和水喷头的结构示意图;
图8为本发明中行走支撑组件的结构示意图。
图中:
100-清洁组件、
110-上部组件、111-上盖板、113-电磁推杆、114-水箱、115-气体产生器、116-支撑板一;
120-底部组件、121-支撑板二、122-清洁刷、123-连杆、124-驱动电机一、125-支架一、126-控制箱、127-从齿轮一、128-水喷头、129-主齿轮一;
130-清洁组件、131-主齿轮二、132-从齿轮二、133-驱动电机二、134-导向杆、135-支架二、136-丝杆、137-滑槽、138-内螺纹块、139-刮板。
200-行走支撑组件、201-舵机一、202-转动节、203-舵机二、204-吸盘。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
请参阅图1-8中,本发明提供一种技术方案:
一种擦窗机器人,包括:
清洁组件100,其用于窗户的表面清洁,其包括:
上部组件110,包括支撑板一116,支撑板一116上安装有水箱114和气体产生器115;
底部组件120,其包括支撑板二121,支撑板二121上转动连接有四个清洁刷122,清洁刷122通过驱动组件转动,用于对窗户表面的擦拭,且清洗刷122的中心嵌设有喷头128,喷头128与水箱114管道连接,用于窗户表面的喷水,进而提高窗户表面清洁的效率;
行走支撑组件200,其设置在清洁组件100的四角位置处,包括支腿,支腿由多个转动节202相互转动组装而成,且两两相邻的转动节202的转动点上均设置有舵机二203,通过舵机二203带动每个转动节202旋转,且支腿的最上端设置有舵机一201,舵机一201安装在支撑板一116上,支腿的最底端设置有吸盘204,吸盘204通过软管与气体产生器115连接,通过舵机一201带动支腿旋转,并通过舵机二203调动转动接202旋转,进而调节支腿的姿态,使吸盘204吸附在窗户边框上,并在使用时带动清洁组件100的移动,实现窗户表面的清洁。
具体的,如图5-6中所示:驱动组件,包括支架一125,支架一125上安装有驱动电机一124,驱动电机一124的输出轴与主齿轮一129固定连接,且主齿轮一129的外部啮合连接有多个从齿轮一127,从齿轮一127与支撑板二121转动连接,且从齿轮一127的底部与清洗刷122固定连接。
如此,通过驱动电机一124带动主齿轮一129旋转,进而带动从齿轮一127转动,清洗刷122跟随转动,进而实现对窗户表面的清洗。
具体的,如图3中所示:上部组件110,还包括上盖板111,上盖板111通过螺栓与支撑板一116固定连接,实现对水箱114和气体产生器115的保护。
具体的,如图4-5中所示:装置还包括清洁组件130,清洁组件130包括可在支撑板一116底部竖向移动的支架二135,支架二135上固定连接有驱动电机二133,驱动电机二133的输出轴与主齿轮二131固定连接,且主齿轮二131的外部与从齿轮二132啮合,从齿轮二132与丝杆136固定连接,且丝杆136在支架二135的前后两侧转动,丝杆136的外部螺旋连接有内螺纹块138,内螺纹块138之间固定连接有刮板139。
如此,通过清洁组件130,当机器人对窗户表面清洁后,启动驱动电机二133带动主齿轮二131和从齿轮二132旋转,进而带动丝杆136旋转,带动刮板139移动,进而实现对窗户表面的水渍清理,提高窗户表面清洁的质量。
具体的,为了保证刮板139的正常移动,丝杆136的底部设置有导杆134,导杆134的两端与支架二135固定连接,且内螺纹块138在导杆二134上滑动。
具体的,仍如图5中所示:支撑板二121上固定连接有控制箱126,控制箱126内设置有供电系统和控制系统,其中,供电系统包括可充电电池,控制系统为带远程控制的CPU处理器,处理器与电池电性连接,且处理器分别与驱动电机一124、驱动电机二133、舵机一201和舵机二203、气体发生器115和水箱114的水泵电性连接,如此,本装置可通过远程控制的方式控制装置的行走以及对窗户表面的清洁。
本装置的工作步骤在于:
S10:首先,启动电源,将装置放置在窗户表面,启动行走支撑组件200,利用舵机一201和舵机二203的配合,打开转动节202,并带动吸盘204接触到窗户边缘四角,启动气体发生器114使吸盘204内部呈负压状态,使装置吸附在窗户边缘;
S20:调整行走支撑组件200的姿态,使底部组件120的底部清洁刷122接触到窗户外表面,启动驱动电机一124,带动清洁刷122同步旋转,同时启动水箱114的水泵,实现窗户表面喷水清理;
S30:继续调整行走支撑组件200的姿态,使清洁组件100在窗户外表面滑动,实现窗户表面的清洗;
S40:清洗完成后,启动驱动电机二133带动主齿轮二131和从齿轮二132旋转,进而带动丝杆136旋转,带动刮板139移动,进而实现对窗户表面的水渍清理,单个窗户清理完成;
S50:一个窗户外表面清洁完成后,调整行走支撑组件200,使装置可以沿窗户边框行走,行走到临侧窗户后,重复上述工作,即可实现对大厦窗户整面的清理。
综上所述,本申请提供了一种擦窗机器人,其通过行走支撑组件200模拟节制动物的腿部,使装置牢牢吸附在窗户边框上,在清洁组件对窗户表面清洗时,行走支撑组件200不会产生松动,因此降低了装置从窗户上脱落的风险,同时行走支撑组件200可以模拟节制动物沿窗户边缘行走,解决了一次只能清理一块窗户的问题,并且可以实现转弯,能够灵活地实现玻璃窗的擦拭功能。
本申请还提供了另一种工作方式:在放置过程中,使用者可以将装置放在大厦底部,打开行走支撑组件200,使其先与窗户边框连接,然后顺着窗户边框爬上去,进而降低工作强度和危险程度。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种户外擦窗脚踏锻炼装置
- 一种新能源汽车用高效的擦窗装置
- 一种擦窗器的真空解除结构及擦窗器
- 一种方便更换擦窗片的汽车擦窗器