供水管网漏损定位系统
文献发布时间:2024-01-17 01:26:37
技术领域
本发明属于供水管网泄漏定位技术领域,具体涉及一种供水管网漏损定位系统。
背景技术
现有技术中,对于供水网关漏损定位的产品要么进行在线监测漏点,要么进行现场实时(即离线)检测漏点。在线监测的缺点是工作人员对没有放置监测设备且又想进一步检测的点位无法判断,需要去现场进行实地测试。
同时现有技术把在线和离线割裂开,但实际漏点检测过程常常是需要两者相结合的,在线监测布置探头的间距会影响到漏点检出的灵敏度,通常需要对部分漏点位置进行现场的二次检测,此时需要用到离线功能;现有技术中在线和离线检测产品是独立两款产品,需要同时采购价格昂贵。
发明内容
鉴于以上存在的问题,本发明提供一种供水管网漏损定位系统,可以同时进行供水管网漏损定位的在线和离线检测,提高了供水管网漏损定位的集成度,降低了供水管网漏损定位成本。
为解决上述技术问题,本发明采用如下的技术方案:
本发明实施例提供一种供水管网漏损定位系统,包括终端设备、云平台和移动端,
其中终端设备包括传感单元和电路板,所述传感单元采用振动传感器,用于将管网泄漏噪声由振动信号转换为电信号;所述电路板包括主控芯片,根据主控芯片内程序切换包括在线监测模式和离线现场检测模式的两种不同工作模式,
在线监测模式时由终端设备和云平台工作,用于对监测区域的日常监测;振动传感器布置在监测区域的各个点位,定时采集管网噪声信号并传输至云平台,在云平台通过定位算法精确定位漏点位置,并在云平台进行展示每日监测结果;离线检测模式时由终端设备、移动端和云平台工作,用于现场实时漏损检测定位,传感终端布置在需要检测的点位上,移动端通过下达检测任务给终端设备,终端设备完成管网噪声数据采集并上发数据给云平台,在云平台通过定位算法精确定位漏点位置,云平台将计算结果返回移动端进行计算结果的展示。
一种可能的实现方式中,在云平台通过定位算法精确定位漏点位置具体包括以下步骤:
在发生泄漏的管段两端各安装第一振动传感器和第二振动传感器,进行传感器数据采集;
假设由第一振动传感器采集到的信号为x,第二振动传感器采集到的信号为y,进行包括互功率谱密度P
根据互功率谱密度P
根据相干性选择滤波范围进行带通滤波,选择采用包括HB、PHAT、SCOT的三个加权函数合成相关函数估计结果,并以此最大值对应的时延值作为到达时间差的估计,计算泄漏距离。
一种可能的实现方式中,第一振动传感器采集到的信号x和第二振动传感器采集到的信号y建立的信号模型为:
其中s(n)为泄漏信号,n
一种可能的实现方式中,通过时延估计算法可获得时延的估计值
其中c为管道的振动传播速度,d为第一振动传感器和第二振动传感器之间的间距。
一种可能的实现方式中,互功率谱密度P
X(ω)=FFT(x(n)) (3)
Y(ω)=FFT(y(n)) (4)
P
其中,FET为傅里叶变换;X(ω)*为X(ω)的共轭。
一种可能的实现方式中,根据相干性选择滤波范围进行带通滤波,选择采用包括HB、PHAT、SCOT的三个加权函数合成相关函数估计结果,并以此最大值对应的时延值作为到达时间差的估计,计算泄漏距离具体包括:
HB的相关性为:
PHAT的相关性为:
SCOT的相关性为:
相关合成结果为:
α,β,γ分别为经加权处理得到的相关函数的权重,并以此最大值对应的时延值作为到达时延值的估计
一种可能的实现方式中,所述终端设备包括NB模块,采用NB模块进行远传,发送数据到云平台。
一种可能的实现方式中,所述终端设备包括蓝牙模块,采用蓝牙模块进行近场通讯,发生数据到移动端。
一种可能的实现方式中,所述电路板还包括传感信号处理模块,所述传感信号处理模块对振动传感器信号进行处理。
一种可能的实现方式中,所述传感信号处理模块进一步包括电荷放大单元、二级放大单元、滤波电路单元和A/D转换单元,所述电荷放大单元对振动传感器产生的电荷信号进行预处理放大并转换为电压信号,所述二级放大模块对转换后的电压信号进行再次放大调整信号幅值范围,所述滤波电路单元对传感器信号进行滤除有用信号外的低频和高频信号,所述A/D转换单元对放大滤波后的振动传感器信号的同步采样转换为数字信号。
采用本发明具有如下的有益效果:
(1)同时进行供水管网漏损定位的在线和离线检测,提高了供水管网漏损定位的集成度,降低了供水管网漏损定位成本。
(2)在云平台通过定位算法精确定位漏点位置时采用相对自适应时延估计,具有操作简单可靠,实时计算性强等优点,并且融合多个广义互相关函数,在现实中噪声较大即信噪比低的情况下,仍能以较高的精度进行定位,经实际使用,定位效果良好。相对卫星探漏、光纤测漏、探地雷达等检测技术具有成本低廉,定位精准的优势。
附图说明
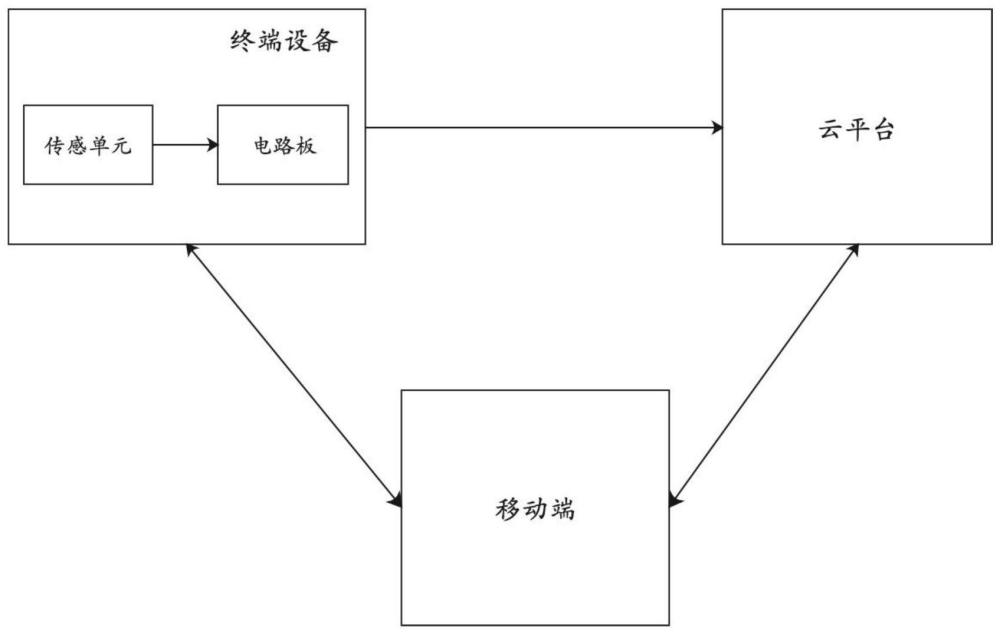
图1为本发明实施例的供水管网漏损定位系统的结构示意图;
图2为本发明实施例中传感信号处理模块的结构原理图;
图3为一具体应用实例中终端设备的安装结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1,所示为本发明一实施例的一种供水管网漏损定位系统的结构示意图,包括终端设备、云平台和移动端,其中终端设备包括传感单元和电路板,传感单元采用振动传感器,用于将管网泄漏噪声由振动信号转换为电信号;电路板包括主控芯片,根据主控芯片内程序切换包括在线监测模式和离线现场检测模式的两种不同工作模式,在线监测模式时由终端设备和云平台工作,用于对监测区域的日常监测;振动传感器布置在监测区域的各个点位,定时采集管网噪声信号并传输至云平台,在云平台通过定位算法精确定位漏点位置,并在云平台进行展示每日监测结果;离线检测模式时由终端设备、移动端和云平台工作,用于现场实时漏损检测定位,传感终端布置在需要检测的点位上,移动端下达检测任务给终端设备,终端设备完成管网噪声数据采集并上发数据给云平台,在云平台通过定位算法精确定位漏点位置,云平台将计算结果返回移动端进行计算结果的展示。
通过以上设置的供水管网漏损定位系统,可同时进行供水管网漏损定位的在线和离线检测,提高了供水管网漏损定位的集成度,降低了供水管网漏损定位成本。
为了提高检测的精度,本发明一实施例中,在云平台通过定位算法精确定位漏点位置具体包括以下步骤:
在发生泄漏的管段两端各安装第一振动传感器和第二振动传感器,进行传感器数据采集,例如采样频率为5120Hz,数据采集时间间隔为40s;
假设由第一振动传感器采集到的信号为x,第二振动传感器采集到的信号为y,进行包括互功率谱密度P
根据互功率谱密度P
根据相干性选择滤波范围进行带通滤波,选择采用包括HB、PHAT、SCOT的三个加权函数合成相关函数估计结果,并以此最大值对应的时延值作为到达时间差的估计,计算泄漏距离。
进一步地,参见图3的一终端设备安装结构示意图,第一振动传感器采集到的信号x和第二振动传感器采集到的信号y建立的信号模型为:
其中s(n)为泄漏信号,n
进一步地,通过时延估计算法可获得时延的估计值
其中c为管道的振动传播速度,d为第一振动传感器和第二振动传感器之间的间距。
其中互功率谱密度P
X(ω)=FFT(x(n)) (3)
Y(ω)=FFT(y(n)) (4)
P
其中,FET为傅里叶变换;X(ω)*为X(ω)的共轭。
本发明一实施例中,对于单个的广义互相关函数,难以应对现实复杂的噪声干扰。采用三个加权函数并配以不同权重进行数据处理。根据相干性选择滤波范围进行带通滤波,选择采用包括HB、PHAT、SCOT的三个加权函数合成相关函数估计结果,并以此最大值对应的时延值作为到达时间差的估计,计算泄漏距离具体包括:
HB的相关性为:
PHAT的相关性为:
SCOT的相关性为:
相关合成结果为:
α,β,γ分别为经加权处理得到的相关函数的权重,并以此最大值对应的时延值作为到达时延值的估计
通过以上设置的基于融合广义互相关的供水管网泄漏精确定位方式,采用相对自适应时延估计,具有操作简单可靠,实时计算性强等优点,并且融合多个广义互相关函数,在现实中噪声较大即信噪比低的情况下,仍能以较高的精度进行定位,经实际使用,定位效果良好。相对卫星探漏、光纤测漏、探地雷达等检测技术具有成本低廉,定位精准的优势。
一具体应用实例中,参见图3,管道直径为600mm,根据经验选取的声波在管道中的传播速度为1100m/s,管道长度为150m,位于市中心某繁华地段水泥路旁,车流噪声极大。根据计算后的相干性图像,选取滤波范围:100-500Hz,联合相关函数对应的时延值为:125.6ms,经计算漏点距离1号传感器为143.9m,经实际开挖验证,实际泄漏距离(距1号传感器)为143.2m,误差仅为0.7m,精度达到了0.47%。
又一具体应用实例中,继续参见图3,此处的管道直径为500mm,根据经验选取的声波在管道中速度为1098m/s,管道长度为123.5m,位于某繁华地段柏油路旁,由于附近施工,由此经过的大货车、渣土车数量极大,噪声极大,且管段穿过一桥梁,由汽车经过桥梁时引起的噪声也十分大。根据计算后的相干性图像,选取滤波范围:60-200Hz,联合相关函数对应的时延值为:60.0ms,经计算漏点距离1号传感器为94.7m,经实际开挖验证,实际泄漏距离(距1号传感器)为94.3m,误差仅为0.4m,精度达到了0.32%。
本发明一实施例中,终端设备包括NB模块,采用NB模块进行远传,发送数据到云平台。终端设备也包括蓝牙模块,采用蓝牙模块进行近场通讯,发生数据到移动端。
本发明一实施例中,参见图2,电路板还包括传感信号处理模块,传感信号处理模块对振动传感器信号进行处理。传感信号处理模块进一步包括电荷放大单元、二级放大单元、滤波电路单元和A/D转换单元,电荷放大单元对振动传感器产生的电荷信号进行预处理放大并转换为电压信号,二级放大模块对转换后的电压信号进行再次放大调整信号幅值范围,滤波电路单元对传感器信号进行滤除有用信号外的低频和高频信号,A/D转换单元对放大滤波后的振动传感器信号的同步采样转换为数字信号。通过以上设置,传感器的电信号被精确的进行了处理,更有利于精确定位的计算。
应当理解,本文所述的示例性实施例是说明性的而非限制性的。尽管结合附图描述了本发明的一个或多个实施例,本领域普通技术人员应当理解,在不脱离通过所附权利要求所限定的本发明的精神和范围的情况下,可以做出各种形式和细节的改变。
- 一种大水量输供水管网漏损分析和漏点定位方法
- 一种供水管网漏损定位方法及系统