一种高压电动叉车制动系统及其控制方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及叉车制动技术领域,更具体地说,本发明涉及一种高压电动叉车制动系统及其控制方法。
背景技术
在工业车辆行业,常用的制动方案为一个泵电机带一个齿轮泵用于起升、转向和制动;其中,现有的电动叉车多采用双泵电机或单泵电机带双联泵实现电动车的液压助力制动;但是采用双泵电机,成本高且不能解决电机高怠速问题;采用单泵电机和双联泵实现液压助力制动功能,效率差,同时电机怠速带来的能耗更高;而且在高压车上,若整车故障引起高压断电,会导致制动失效;如此以上方案均不能保证在整车故障状态制动的可靠性。
其中,高压电动叉车由于自身质量大,惯性大,需要很大的力才能满足制动要求;为了更好的确保制动效果,减少脚施力,因此提出一种高压电动叉车制动系统及其控制方法,避免出现高压电动车在高压下电时引起制动失效问题。
发明内容
为了克服现有技术的上述缺陷,本发明的实施例提供一种高压电动叉车制动系统及其控制方法,以解决上述背景技术中提出的问题。
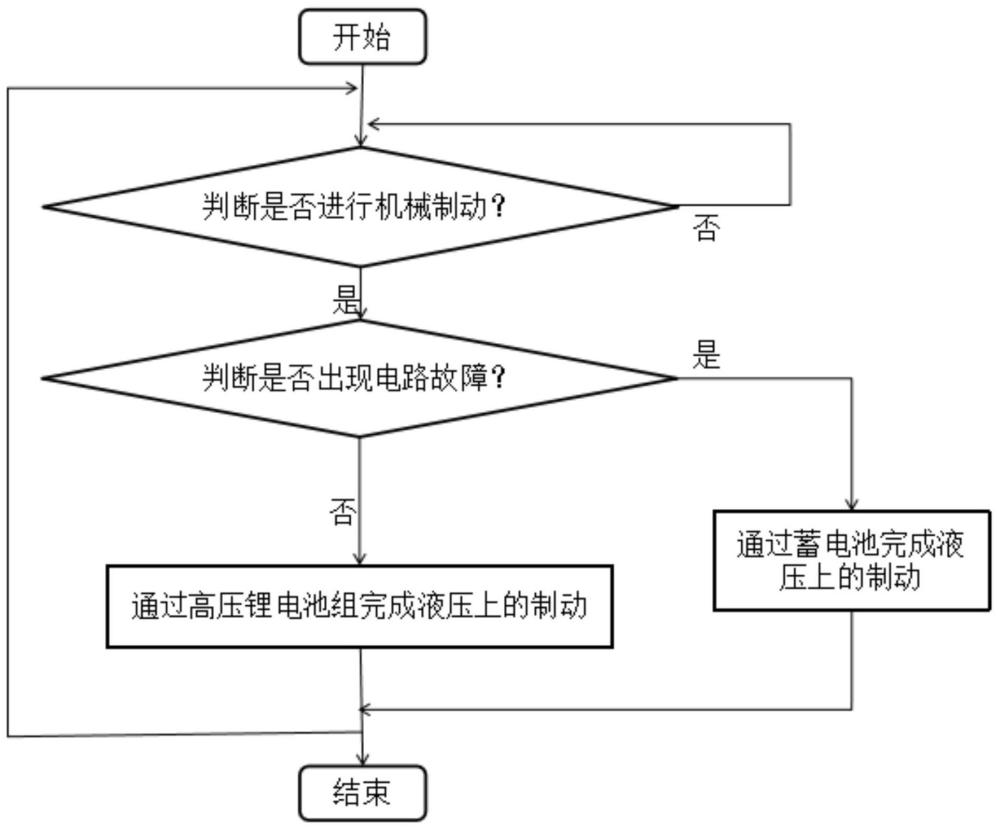
为实现上述目的,本发明提供如下技术方案:一种高压电动叉车的制动方法,包括以下步骤:
步骤一:根据制动开关判断踏板是否进行制动:若进行机械制动,则进行步骤二;若不进行机械制动,则高压电动叉车不制动,继续步骤一;
步骤二:根据VCU判断是否处于电路故障状态:若不处于故障时,则进入步骤三;若处于故障时,则进行步骤四;
步骤三:由高压锂电池组给液压动力单元供电,液压动力单元给制动阀供油,进而实现制动器的液压制动;随后进入步骤五;
步骤四:由蓄电池给液压动力单元供电,液压动力单元给制动阀供油,进而实现制动器的液压制动;随后进入步骤五;
步骤五:通过制动开关判断踏板是否机械制动结束;并且,VCU判断是否进行液压制动;若进行机械制动并又进行液压制动,则高压电动叉车进行制动,并继续步骤五;否则,高压电动叉车不制动,返回步骤一。
进一步地,步骤一中:所述机械制动:驾驶员踩下制动踏板,控制踏板的行程,调节控制阀的输入活塞的移动,输入活塞的运动推动制动总泵活塞挤压液压油流入制动器中的制动分泵,完成机械制动。
进一步地,步骤二中:所述VCU接受制动信号判断是否处于电路故障状态时,VCU断开加速器电路。
进一步地,步骤二中:所述VCU接受制动信号判断是否处于电路故障状态时,VCU将制动信号传递至控制系统,仪表显示制动信号。
进一步地,步骤一中:所述不进行机械制动,则VCU连接并控制加速器。
进一步地,步骤一中:所述不进行机械制动,则VCU未收到制动信号,此时仪表不显示制动信号。
进一步地,步骤三中:所述高压锂电池组给液压动力单元供电:VCU根据制动信号,向与液压动力单元并联的高压锂电池组发送供电信号。
进一步地,步骤四中:蓄电池给液压动力单元供电:当VCU判断高压锂电池组给液压动力单元供电处于电路故障状态时,VCU接通蓄电池与液压动力单元的电路。
一种高压电动叉车的制动系统,包括制动操纵系统、控制系统、与制动操纵系统连接的制动阀、与控制系统连接的液压动力单元和与制动阀连接的制动器,
所述制动操纵系统包括制动踏板总成和安装支架总成,所述制动踏板总成固定安装在安装支架总成上,且所述安装支架总成上固定安装有制动开关;
所述控制系统包括VCU、加速器和仪表,所述安装支架总成通过制动开关与VCU连接,所述VCU分别与液压动力单元、加速器和仪表信号连接。
进一步地,所述制动踏板总成包括安装在安装支架总成上的踏板和安装在安装支架总成上铰链支架,所述液压动力单元通过管路与制动阀连接。
本发明的技术效果和优点:
1、与现有技术相比,通过设置高压电动叉车的制动系统,由于该制动系统由机械制动和液压制动两部分组成,且液压制动的电路所需供电由两部分组成,可以确保液压制动的可靠性;确保整机处于电路故障状态时,如电池组损坏,短路等,其可以通过蓄电池供电,保证制动的可靠性。
2、与现有技术相比,通过设置液压动力单元用于制动,可以减少齿轮泵、电机、电控数量,降低整机能耗,在没有制动需求时处于停机状态,不需要消耗电量,低碳环保;成本相较高压电机和电控而言,经济性非常好,能够降低整机成本,降低整机能耗。
附图说明
图1为本发明的流程示意图。
图2为本发明制动操纵系统和控制系统示意图。
图3为本发明电气原理图结构示意图。
图4为本发明液压动力单元制动原理图结构示意图。
图5为本发明制动操纵系统结构示意图。
附图标记为:
1、制动操纵系统;
11、制动踏板总成;111、踏板;112、铰链支架;
12、安装支架总成;13、制动开关;
2、控制系统;21、VCU;22、加速器;23、仪表;
3、制动阀;4、液压动力单元;5、制动器;6、管路;7、制动总泵。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
如附图1和图2所示的一种高压电动叉车的制动方法,包括以下步骤:
步骤一:根据制动开关判断踏板是否进行制动:
若驾驶员踩下制动踏板,一方面:控制踏板的行程,调节控制阀的输入活塞的移动,输入活塞的运动推动制动总泵活塞挤压液压油流入制动器中的制动分泵,完成机械制动;另一方面:制动开关S3闭合,继电器K1,K2开始工作,继电器K1的常开触点S1接通,同时继电器K2的常开触点S2接通,液压动力单元开始工作;随后则进行步骤二;
若不进行机械制动,则高压电动叉车不制动,VCU连接并控制加速器,VCU未收到制动信号,此时仪表不显示制动信号;随后继续步骤一;
步骤二:VCU接受制动信号后,判断是否处于电路故障状态,同时VCU接收信号后切断加速器;并且,VCU将制动信号传递至控制系统,仪表显示制动信号;
若不处于故障时,则进入步骤三;
若处于故障时,则进行步骤四;
步骤三:VCU根据制动信号,向与液压动力单元并联的高压锂电池组发送供电信号,由DC-DC通过将高压锂电池组的高压变为低压,给液压动力单元供电,液压动力单元给制动阀供油,进而实现制动器的液压制动;随后进入步骤五;
步骤四:整车处于故障状态,高压断电,即当VCU判断高压锂电池组给液压动力单元供电处于电路故障状态时,VCU接通蓄电池与液压动力单元的电路,12V蓄电池向液压动力单元供电,液压动力单元给制动阀供油,进而实现制动器的液压制动;随后进入步骤五;
步骤五:通过制动开关判断踏板是否机械制动结束;并且,VCU判断是否进行液压制动;若进行机械制动并又进行液压制动,则高压电动叉车进行制动,并继续步骤五;否则,高压电动叉车不制动,返回步骤一。
其中,电路故障由整机的VCU判断,故障有很多种,比如:电池损坏,电机损坏,短路,继电器损坏等,为保证整机安全,VCU会限制锂电池组工作;
其中,机械制动和液压制动针对的是同一个制动阀,因此需要机械和液压两部分共同工作才能实现控制制动器制动;单一的机械制动或单一的液压制动均不能使高压电动叉车制动;如此,采用两种制动方式,解决了自身质量大,惯性大,需要很大的力才能满足制动要求的问题。
如附图2-5所示的一种高压电动叉车的制动系统,包括制动操纵系统1、控制系统2、与制动操纵系统1连接的制动阀3、与控制系统2连接的液压动力单元4和与制动阀3连接的制动器5;
制动操纵系统1包括制动踏板总成11和安装支架总成12,制动踏板总成11固定安装在安装支架总成12上,且安装支架总成12上固定安装有制动开关13;
控制系统2包括VCU21、加速器22和仪表23,安装支架总成12通过制动开关13与VCU21连接,VCU21分别与液压动力单元4、加速器22和仪表23信号连接;液压动力单元4通过管路6与制动阀3连接。
其中,制动阀3包括控制阀、制动总泵7和分流阀,控制阀的作用是将踏板压力转变为液压动力,然后由液压油流入制动器5中的制动分泵,完成制动;
其中,液压动力单元4包含电机、启动开关、阀块、油箱、齿轮泵等,电机会带动齿轮泵进行泵油,通过管路6将油泵至制动阀3;
在一个优选地实施方式中,如附图1-5所示,制动踏板总成11包括安装在安装支架总成12上的踏板111和安装在安装支架总成12上铰链支架112,以便于踏板111需要制动时,踩下制动的踏板111,与制动的踏板111联动的铰链支架112会作用在动力制动阀3的推杆上,从而将踏板111的行程传递到控制阀的输入活塞,推动活塞移动,输入活塞的运动推动制动总泵活塞,液压油流入制动器5中的制动分泵,完成制动。
其中,本发明的电路中,高压锂电池组与液压动力单元4并联,蓄电池与VCU21并联,VCU21与高压锂电池组信号连接;
其中,踩下制动的踏板111时,踏板111连接的铰链支架112会接触制动开关13,从而造成S3闭合,继电器K1,K2的线路接通,电路中的继电器K1,K2开始工作,继电器K1的常开触点S1和继电器K2的常开触点S2接通电路,从而VCU21接收信号后切断加速器22;
其中,高压锂电池组与液压动力单元4始终保持并联,VCU21根据制动信号,向与液压动力单元4并联的高压锂电池组发送供电信号,收到信号,液压动力单元4开始工作,提供电源;当VCU21判断高压锂电池组给液压动力单元4供电处于电路故障状态时,VCU21接通蓄电池与液压动力单元4的电路,蓄电池给液压动力单元4供电,从而保证液压动力单元4能够根据VCU21的信号进行液压制动。
其中,VCU21接收S2信号后判断为制动泵电机制动状态,将制动信号传递至控制系统2,并在仪表23显示制动信号。
其中,当松开制动的踏板111时,S3断开,相应的VCU21接收S2信号后判断制动泵电机不处于制动状态,将制动信号传递至控制系统2,并在仪表23取消显示制动信号。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种基于驻车制动提升机动车行车制动安全的控制方法和系统
- 一种电动汽车制动控制方法、整车控制装置及系统
- 一种轨道车辆救援用停放制动控制系统及控制方法
- 一种排气制动蝶阀控制系统及控制方法
- 一种重装电动叉车电液复合制动系统及控制方法
- 一种电动叉车的停车制动控制装置及其控制方法