一种基于绳索驱动的模块化串联三轴云台关节
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及云台关节领域,特别是涉及一种基于绳索驱动的模块化串联三轴云台关节。
背景技术
随着人类科学的水平发展和技术的进步,机器人种类日新月异,机器人的研究以及其在各个领域的应用都在被广泛地关注着。在传统工业领域以及许多服务、科研领域,均常见各种多自由度机械臂。虽传统工业机器人在物流、装配等领域存在具有强大的优越性,但也因其质量高、惯性高、刚度大,使得作业人员在与其进行协同交互时极易发生危险,这将直接导致作业人员无法与其很好地进行交互,降低人机协作场合的工作效率,人机交互的安全性显然不足。
若要突破传统工业机器人边界,物理人机交互则是一个十分关键的突破口,因此绳驱动技术为实现安全的人机交互提供了实际的可能性。采用绳索等柔性介质驱动的方式,直接替代传统工业机器人齿轮、气压、液压等传动方式,并因其可在任意路径进行远程力与运动的传递,因此可直接将云台关节上的电机转移到基座或远离转动轴的位置,亦或使电机等硬件设备与关节零件高度集成,利用绳索的灵活布置,把驱动力传递至转动关节处,最终使云台关节产生运动。
采用绳驱动的方式能使机器人达到质量小、惯量小、自重载荷比大、人机交互安全性强、灵活性高、精度高、可靠性高等优良特性。随着时间的发展,机器人将全面进入服务、医疗、军事等领域,其人机交互的可靠性更为人们所看重,安全性原则的重要性不言而喻,因此绳驱动技术将在未来具有极其广阔的发展前景,甚至直接推动人类社会的进步与发展。
现有技术1:
如图1所示,绳驱动冗余自由度并联机构的主要组成部分包括悬挂系统、绳索系统、运动平台和控制系统。悬挂系统是机构的支撑系统,绳索系统是机构的驱动系统,运动平台是机构的工作系统,控制系统是机构的核心系统。
绳驱动冗余自由度并联机构的绳索系统通常由多根绳索组成,绳索一端固定在悬挂系统上,另一端固定在运动平台上。通过控制绳索的张力,可以控制机构的运动轨迹和姿态。此外,绳驱动冗余自由度并联机构具有冗余自由度,即机构的自由度数量大于任务所需的自由度数量,但同时也增加了其运动解算的复杂性。
由于绳驱动冗余自由度并联机构的绳索数量较多,且存在冗余自由度,系统复杂度高,系统结构相对复杂,因此需要较为复杂的控制系统来控制机构的运动和姿态,增加了机构的技术设计水平和维护成本。
多条绳索需要同时调整,绳驱动机构多条绳索驱动,而且每个绳索都需要进行同步调整,具有极大的耦合特性,需要一定的时间和精度来完成。
绳索对机构自由度的限制,绳驱动冗余自由度并联机构的自由度受到绳索数量和分布的限制,这可能会影响机构的灵活性和可操作性,另外刚度也存在一定上限。
现有技术2:
如图2所示,传统的三轴云台关节由三个旋转轴组成,分别是俯仰轴、横滚轴和偏航轴。三轴云台关节广泛应用于机器人、工业生产线、航空航天等领域中,用于实现机械臂、机器人手、平移台等设备的运动控制。俯仰轴负责机械臂或机器人手的上下运动,使其能够在垂直方向上自由旋转。横滚轴负责机械臂或机器人手的左右运动,使其能够在水平方向上自由旋转。偏航轴负责机械臂或机器人手的旋转运动,使其能够在垂直轴周围自由旋转。通过这三个轴的协同运动,三轴云台关节可以实现机械臂或机器人手在三个方向上的平稳、精确运动,从而完成各种复杂的操作任务。
通常三轴云台关节采用电机直接驱动或传统的齿轮、同步带驱动方式进行动力传输。
另一种传统的三轴云台关节如图3-4所示,三轴云台关节的设计多采用传统的直驱方式进行动力的传输,不仅不能提高运动扭矩,保证传动比,倒置末端负载能力低,而且还难以降低系统的转动惯量,不利于电机的工作运行;而采用齿轮传动方式进行动力传输时精度难以保证,在产生巨大噪音的同时缺乏稳定性,精度水平较低难以达到控制要求。由于三轴云台关节需要同时实现多个方向的运动,某些机构的运动可能会干涉其他机构的运动,导致运动不协调或出现故障。
发明内容
为了解决如何保证绳驱动云台关节的稳定性和灵活性的同时降低维护成本,本发明提出一种基于绳索驱动的模块化串联三轴云台关节。
本发明的技术问题通过以下的技术方案予以解决:
一种基于绳索驱动的模块化串联三轴云台关节,包括由绳索驱动各自的关节转盘进行转动的俯仰轴模块、滚转轴模块和偏航轴模块,其中,所述俯仰轴模块的关节转盘与所述滚转轴模块通过第一连接支架相连,所述滚转轴模块的关节转盘与所述偏航轴模块通过第二连接支架相连。
在一些实施例中,所述俯仰轴模块、所述滚转轴模块和所述偏航轴模块的关节转盘的中心线相交于同一点。
在一些实施例中,所述俯仰轴模块、所述滚转轴模块和所述偏航轴模块的关节转盘的转动角度为180度以上。
在一些实施例中,所述俯仰轴模块采用“8”字型联动绕线的绞盘驱动机构由电机驱动关节转盘;优选的,由电机转轴线盘对绳索进行存储,再引出两根绳索连接至关节转盘以顺/逆时针控制关节转盘转动,所述电机转轴线盘和所述关节转盘设有用于穿过绳索的孔位,所述绳索以张紧状态固定;优选地,所述关节转盘与所述电机转轴线盘的外径比率为4:1;优选地,所述关节转盘的内层安装有交叉滚子轴承;优选地,所述关节转盘为空心结构。
在一些实施例中,所述滚转轴模块采用由滑轮引导两根绳索联动绕线的绞盘驱动机构由电机驱动关节转盘;优选的,所述滚转轴模块的电机设置于所述第一连接支架上;优选的,由电机转轴线盘对绳索进行存储,再引出两根绳索连接至关节转盘以顺/逆时针控制关节转盘转动,所述电机转轴线盘和所述关节转盘设有用于穿过绳索的孔位,所述绳索以张紧状态固定;优选地,所述关节转盘的内层安装有交叉滚子轴承;优选地,所述关节转盘为空心结构。
在一些实施例中,所述偏航轴模块采用双“8”字型联动绕线的绞盘驱动机构由电机驱动关节转盘;优选地,所述偏航轴模块包括内侧上层的电机转轴线盘、内侧下层的关节转盘、外侧上层线盘、转轴以及外侧下层线盘,由所述电机转轴线盘对绳索进行存储,一根绳索由所述电机转轴线盘绕线至所述外侧上层线盘,所述外侧上层线盘通过所述转轴耦合至所述外侧下层线盘,另一根绳索由所述外侧下层线盘绕线至所述关节转盘;优选地,所述关节转盘的内层安装有交叉滚子轴承;优选地,所述电机相对于所述关节转盘偏置。
在一些实施例中,所述偏航轴模块的内侧具有用于安装所述电机、所述电机转轴线盘和所述关节转盘的双层碳板结构,所述双层碳板结构上设置有固定盘,所述转轴通过所述法兰轴承固定于所述固定盘的外侧,所述双层碳板结构和所述固定盘设置有用于散热和/或观察的孔。
在一些实施例中,所述第一连接支架通过榫卯结构拼插而成。
在一些实施例中,所述第一连接支架包括碳纤维主板和至少四个连接块,所述碳纤维主板的一端在所述碳纤维主板的第一面通过两个连接块连接所述俯仰轴模块的关节转盘,所述碳纤维主板的另一端在所述碳纤维主板的第二面通过另外两个连接块连接所述滚转轴模块。
在一些实施例中,所述第二连接支架包括平行的两个碳纤维主板和至少四个连接块,所述平行的两个碳纤维主板呈弓形,所述平行的两个碳纤维主板的一端通过两个连接块连接所述滚转轴模块的关节转盘,所述平行的两个碳纤维主板的另一端通过另外两个连接块连接所述偏航轴模块。
本发明与现有技术对比的有益效果包括:
本发明通过绳索驱动各自的关节转盘进行转动的俯仰轴模块、滚转轴模块和偏航轴模块的设置,提升本发明模块化串联三轴云台关节的运动控制性能,具有一定的传动比且较为精确,而且在保证减少空间体积的情况下实现扭矩的传递,更优于传统减速机构的驱动方式,即可解决传统云台负载较低的问题,且其连接的简约性提升了结构的稳定性。该设置还提升了本发明模块化串联三轴云台关节的柔性,使其具有刚柔耦合的显著特点,在进行人机交互时能充分保护人员的安全性,避免了刚性云台的失控对人员造成伤害。刚柔耦合特点还提高了运动的灵活性,保证刹车性能,提高末端负载,同时系统所占空间较小,并使其转动惯量达到较低水平,保证云台机构的模块化连接,便于结构更换与机构检修。模块化串联三轴云台关节较易于检修且容易观察内部工作状况,以及便于连接各个模块的支架,利于更换以及拆卸模块。本发明模块化串联三轴云台关节具备紧密结合的特点,而模块化串联布置方式又可以避免因为某个元件出现故障而导致整个机构的失效,降低其与其它关节连接的耦合性。可将传感器等模块集成于关节处,使总的关节所占空间最小,在紧凑的空间下能减少三轴云台关节的转动惯量,使电机所需要的扭矩量仅可能少以保护电机的运转,最终使机构的质心位于靠近基座的关节处,降低机构整体的质量惯性,提升机构的运动性能。采用可拆分模块形式的模块化布置方式,连接迅速且稳定,利于结构更换与机构检修。绳索驱动及驱动源布置于靠近基座的位置,调整质心位置,以减少系统的转动惯量,提升系统的灵活性。机构的转动惯量维持在较低的水平,同时也能使机构紧密结合,使其所占空间尽量最小,达到高度集成化。
本发明实施例中的其他有益效果将在下文中进一步述及。
附图说明
图1是现有技术中绳驱动冗余自由度并联机构的示意图;
图2是传统的直驱三轴云台关节的示意图;
图3是另一种传统的直驱三轴云台关节的示意图;
图4是传统的齿轮驱动三轴云台的示意图;
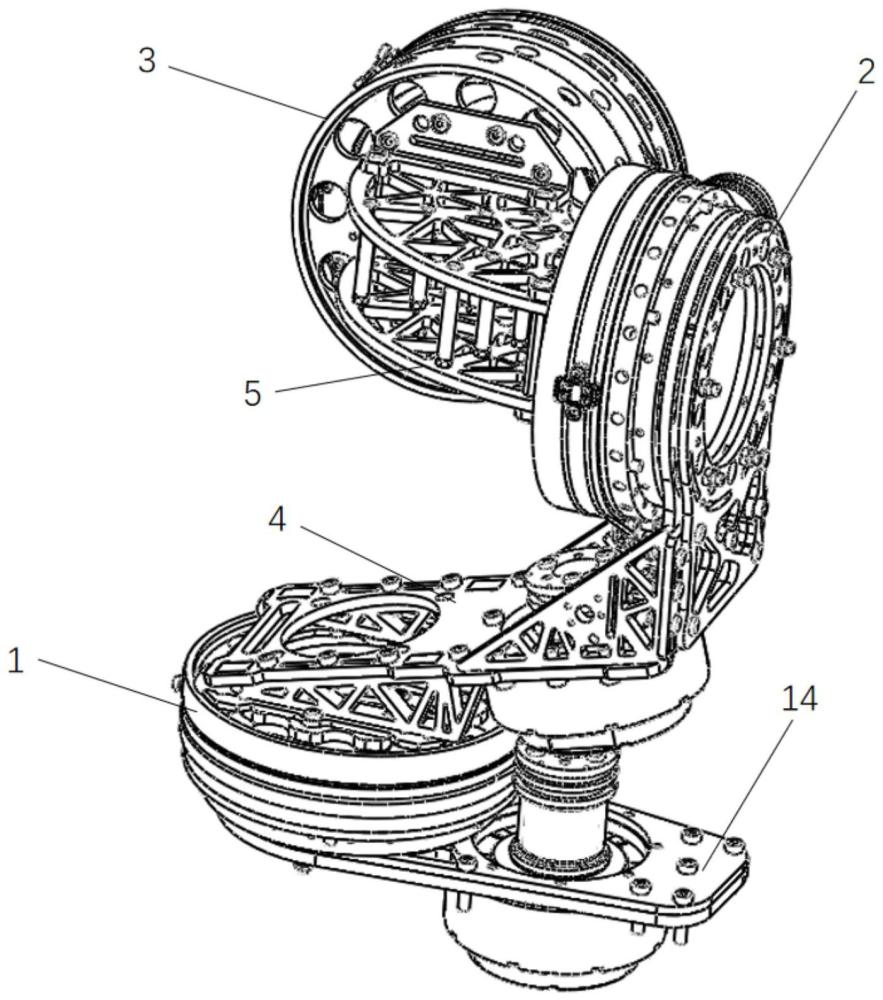
图5是本发明实施例中模块化串联三轴云台关节的立体图;
图6是本发明实施例中模块化串联三轴云台关节的轴侧图;
图7是本发明实施例中模块化串联三轴云台关节的爆炸图;
图8是本发明实施例中第一连接支架的示意图;
图9是本发明实施例中第二连接支架的示意图;
图10是本发明实施例中模块化串联三轴云台关节轴线的示意图;
图11是本发明实施例中“8字型绕线”的示意图;
图12是本发明实施例中俯仰轴模块的示意图;
图13是本发明实施例中俯仰轴模块的爆炸图;
图14是本发明实施例中俯仰轴模块的绕线示意图;
图15是本发明实施例中滚转轴模块的示意图;
图16是本发明实施例中滚转轴模块的爆炸图;
图17是本发明实施例中滚转轴模块的绕线示意图;
图18是本发明实施例中偏航轴模块的示意图;
图19是本发明实施例中偏航轴模块的爆炸图;
图20是本发明实施例中偏航轴模块的绕线示意图;
附图标记说明如下:
x-俯仰轴,y-滚转轴,z-偏航轴,p-中心线交点,1-俯仰轴模块,11-俯仰轴模块的锁绳器,12-俯仰轴模块的关节转盘,13-俯仰轴模块的电机转轴线盘,14-固定机架,15-俯仰轴模块的电机,16-俯仰轴模块的交叉滚子轴承,2-滚转轴模块,21-滚转轴模块的锁绳器,22-滚转轴模块的关节转盘,23-滑轮,24-滚转轴模块的电机转轴线盘,25-滚转轴模块的电机,26-滚转轴模块的交叉滚子轴承,3-偏航轴模块,31-偏航轴模块的锁绳器,32-外侧上层线盘,33-转轴,34-外侧下层线盘,35-偏航轴模块的关节转盘,36-偏航轴模块的电机转轴线盘,37-偏航轴模块的交叉滚子轴承,38-固定盘,39-法兰轴承,4-第一连接支架,41-第一连接支架的碳纤维主板,411-第一连接支架的连接块,5-第二连接支架,51-第二连接支架的碳纤维主板,511-第二连接支架的连接块。
具体实施方式
下面对照附图并结合优选的实施方式对本发明作进一步说明。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
需要说明的是,本实施例中的左、右、上、下、顶、底等方位用语,仅是互为相对概念,或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。
传统运动云台具有完全刚性的特点,缺乏良好的人机交互性能,而本发明实施例提出旨在采用绳索驱动的方式实现机构的刚柔耦合(刚性零部件+柔性传动绳)特性的三轴运动云台关节,其柔性的特点能使三轴运动云台关节在与人类交互的过程中得到安全的体验;更重要的是,绳索因其响应速度较快而具有极佳的刹车性能,且在过载时绳索自身可以断裂而保护人类等优点,使其人机交互的性能良好。而反观传统运动云台,因为其纯刚性的特点造成在与人交互碰撞时容易造成危险。提高人机交互的安全性,解决交互安全性问题。
如图5至图7所示,该三轴运动云台关节通过具有较大传动比特点的绳索传动机构,提高了云台关节的末端负载,提高运动的灵活性,保证刹车性能,提高了三轴运动云台关节末端负载能力,解决了若不采用带有传动比的传统方式则其负载会非常低的问题。同时各传动机构的紧密结合使系统所占空间较小,并使其转动惯量达到较低水平,保证三轴运动云台关节的模块化连接,便于三轴运动云台关节更换与机构检修。
为解决绳索驱动的三轴运动云台关节的驱动源与驱动媒介布局问题,采用如下设计:
①俯仰轴模块1采用紧凑且直接的“8”字型联动绕线的绞盘驱动机构由电机驱动关节转盘,使驱动源(电机)能最直接地转动转盘;
②滚转轴模块2的驱动源(电机)布置于连接的支架上,并通过滑轮更改绳索的绕转方向,最后驱动转盘运动,紧凑的布置方式能使布局空间得到最有效的利用;
③偏航轴模块3采用双“8”字绕线,将电机集成于关节转盘内,充分利用转盘的内部空间,并能在最大化利用空间的同时增加输出扭矩,从而增大负载。综上所述,驱动源(电机)及驱动媒介布局问题可以用“紧密结合”的布局方式解决。
本发明实施例提出的三轴运动云台关节还通过采用合理的布局方式将三个轴及其驱动源组合布局,最终实现三轴云台的合理运动,从而解决机械结构设计运动不合理的问题。并通过各关节之间的连接仅需拆卸少量螺钉即可实现各轴系的拆卸与检修,便于进行模块更换,从而解决检修拆卸不方便的问题。其还设计专门的预紧机构对绳索进行预紧,从而绳索预紧问题。
本发明实施例提出了一种基于绳索驱动的模块化串联三轴云台关节,如图5至图7所示,其包括由绳索驱动各自的关节转盘进行转动的俯仰轴模块1、滚转轴模块2和偏航轴模块3,该三轴云台关节具备三个自由度,分别为俯仰、滚转、偏航轴部分,如图7所示,具体为俯仰轴模块1和滚转轴模块2以及偏航轴模块3,并通过其模块化关节串联的形式连接。其连接方式如下:
①俯仰轴模块的关节转盘与偏航轴模块之间通过第一连接支架4进行连接,如图8所示,第一连接支架4包括碳纤维主板41和至少四个连接块411,碳纤维主板41的一端在碳纤维主板41的第一面通过两个连接块411连接俯仰轴模块1的关节转盘,碳纤维主板41的另一端在碳纤维主板41的第二面通过另外两个连接块411连接滚转轴模块2。
具体采用碳纤维主板41和四个铝合金连接块411进行连接,并通过螺钉紧固的形式进行安装连接;
②偏航轴模块3与滚转轴模块2的关节转盘之间通过第二连接支架5相连,如图9所示,第二连接支架5包括平行的两个碳纤维主板51和至少四个连接块511,其中连接块511采用铝合金材质,平行的两个碳纤维主板51呈弓形,平行的两个碳纤维主板51的一端通过两个连接块511连接滚转轴模块2的关节转盘,平行的两个碳纤维主板51的另一端通过另外两个连接块511连接偏航轴模块3。
其中两个碳纤维主板51之间具体采用数个铝柱、铜柱进行连接,可提高其连接的稳固性。如图5所示,并且使俯仰轴模块1、滚转轴模块2和偏航轴模块3的关节转盘的中心线相交于同一点p(中心线交点p),即运动关节轴中线(即俯仰轴x、滚转轴y和偏航轴z)相交于同一点,以利于其运动学建模。三个关节(即俯仰轴模块1、滚转轴模块2和偏航轴模块3)分别为三个方向的旋转,并保证俯仰轴模块1、滚转轴模块2和偏航轴模块3的关节转盘的转动角度至少为180度。
本发明实施例中的绕线原理如下:
三轴云台关节利用了“8”字型联动绕线原理,如图11所示,即由一个电机通过“8”字型绕线的方式把动力传递至被驱动的转动主轴,并且可以在不同关节线盘直径比的情况下实现增矩传动。电机置于转动关节旁,通过两根绳索顺/逆时针控制关节的转动,这种方法的好处是在保证一定的减速比的同时避免传统齿轮啮合传动等带来的巨大噪声,同时降低重量,利于实现高速运动。电机转轴的设计具有较多细孔,通过一端带锌头的钢丝绳穿过其中即可完成固定任务。
图11中“线1”和“线2”指代的是两根独立钢丝绳,其布置外形酷似“8”字,所以其原理称为八字绕线原理。
应理解,本发明实施例优选采用钢丝绳,但本发明中的绳索不限于钢丝绳。
如图12和图13所示,俯仰轴模块采用如图14所示的“8”字型联动绕线的绞盘驱动机构,将电机15置于关节转盘12旁,并通过连接的电机转轴线盘13对绳索进行存储,其绕线原理如图14所示,再引出两根绳索连接至关节转盘12以顺/逆时针控制关节转盘12转动,电机转轴线盘13以及关节转盘12均设有用于穿过绳索的孔位,穿过后采用特质的锁绳器11与顶丝对绳索进行固定,并通过拉力计张紧保证绳索的状态。关节转盘12与电机转轴线盘13的外径比率约为4:1,关节转盘12的内层安装有交叉滚子轴承16;优选地,关节转盘为空心结构。由于绳索在拉伸的过程中会因本身弹性形变而存在部分变形,因此最终传递出约为原电机四倍的转矩。最后三轴云台关节通过固定机架14可与额外的基座连接。如在固有孔位使用螺钉螺母进行连接固定,从而可以对云台关节进行固定并实现多轴运动。
因为刚度与关节转盘12的直径成正比,因此当关节转盘12的直径到达一定长度时,能保证系统刚度在一个较大的水平,同时绳索的长度也将相应地增加。在关节转盘12的内层,安装交叉滚子轴承16,在带动关节运动的同时为关节提供轴向力支撑,保证外层在旋转状态下系统的稳定性。关节中心采用大空心形状,在保证其质量减轻的同时利于电气线缆的布置。
图14中“线1”和“线2”指代的也是两根独立钢丝绳,其布置外形酷似“8”字,所以其原理称为八字绕线原理,两根钢丝绳都是一端拥有锌头穿过电机转轴的孔位,另一端采用锁绳器进行压紧。
为了尽可能使转动惯量减小,使俯仰轴模块采用的电机所需刹车扭矩尽可能小,滚转轴模块如图15和图16所示,滚转轴模块2的电机25被置于俯仰轴模块1与滚转轴模块2的第一连接支架4上,其由碳纤维材料雕铣而成,能使结构尽可能地紧凑。滚转轴模块2与俯仰轴模块1的第一连接支架4使用榫卯结构拼插而成,通过在外侧旋入螺钉使在保持结构稳定的同时便于拆卸检修。
如图17所示,滚转轴模块2采用由滑轮引导两根绳索联动绕线的绞盘驱动机构由电机25驱动关节转盘22;具体是在电机转轴线盘24传出后经固定的滑轮23绕至滚转轴模块2的关节转盘22,并通过定制的锁绳器21在对应的孔位对绳索进行固定,其绕线原理如图17所示。滑轮23通过碳管、筛打螺钉、支架等固定在相应的连接块上。
由电机转轴线盘24对绳索进行存储,再引出两根绳索连接至关节转盘以顺/逆时针控制关节转盘22转动,电机转轴线盘24和关节转盘22设有用于穿过绳索的孔位,绳索以张紧状态固定;关节转盘22的内层安装有交叉滚子轴承26;并且关节转盘22为空心结构。
在滚转轴模块2的关节处采用中空的设计,能让电气线缆穿过并利于固定。
图17中“线1”和“线2”指代的也是两根独立钢丝绳,其布置方式也是按照八字绕线原理,但中间通过滑轮进行转弯过渡,从而改变绳索的绕行路径,两根钢丝绳都是一端拥有锌头穿过电机转轴的孔位,另一端采用锁绳器进行压紧。
偏航轴模块3通过双层碳纤维主板结构的第二连接支架5与滚转轴模块2实现连接,中间的铝柱以及大镂空的碳板可为电气线缆的布置提供固定空间。绳索布置方式采用双“8”字型联动绕线的绞盘驱动机构由电机驱动关节转盘35,其绕线原理如图20所示,在内置电机减少外侧冗余固定机构和保证高度集成化的同时实现动力传输。
偏航轴模块3包括内侧上层的电机转轴线盘36、内侧下层的关节转盘35、外侧上层线盘32、转轴33以及外侧下层线盘34,由所述电机转轴线盘36对绳索进行存储,一根绳索由电机391通过电机转轴线盘36绕线将动力传输至外侧上层线盘32(含锁紧机构),外侧上层线盘32再通过连接的转轴33耦合把动力传输至外侧下层线盘34,而转轴33则通过法兰轴承39固定于固定盘38的外侧,另一根绳索由外侧下层线盘34再把动力通过绕线传输至内侧下层的关节转盘35,关节转盘35的内层安装有交叉滚子轴承37,在交叉滚子轴承37的轴向支撑下最终实现关节转盘35的转动。
偏航轴模块3的内侧具有用于安装电机391、电机转轴线盘36和关节转盘35的双层碳板结构,双层碳板结构上设置有固定盘38,固定盘38上方也可以设有关节固定盘392,偏航轴模块3的电机相对于关节转盘35采用偏置放置,可为电气线缆在另一侧的通过提供较大的空间,双层碳板结构和固定盘设置有用于散热和/或观察的孔,具体为外侧的圆孔在为电机散热的同时为内侧线盘提供里层线盘的转动情况提供观察空间,并保持外观的优美性。
图20中“线1”、“线2”、“线3”和“线4”指代的是四根独立钢丝绳,其布置方式也是按照八字绕线原理,因为是上与下均采用八字绕线,因此称之为“双8字”绕线,其中“上八字”的绳索固定于外侧上层线盘处,“下八字”两根钢丝绳都是一端拥有锌头穿过外侧下层线盘的孔位,另一端在大转盘处采用锁绳器进行压紧。
本发明实施例提出的三轴云台关节是连接基座与末端负载的关键部分,选用高比强度和高比刚度的材料,如碳纤维、铝合金等,并采用大截面的材料以增加其抗弯性能,在保证刚度和强度的情况下尽量使其重量降到较低,提升机构的运动性能。
三轴云台关节具备紧密结合的特点,可将传感器等模块集成于关节处,使总的三轴云台关节所占空间最小,在紧凑的空间下能减少三轴云台关节的转动惯量,使关节的电机所需要的扭矩量尽可能少以保护电机的运转,最终使机构的质心位于靠近基座的关节处,降低机构整体的质量惯性,提升机构的运动性能。
本发明实施例提出的三轴云台关节具有如下优势:
采用绳索驱动技术可以实现三轴云台关节非常精准的运动控制,使得三轴云台关节可以更加精准地执行任务,减少三轴云台关节对人员造成的伤害风险。因此,为了解决三轴云台关节在人机交互过程中的安全性问题,该三轴云台关节采用绳索驱动技术以提升其运动控制性能,其具有刚柔耦合的显著特点,在进行人机交互时能充分保护人员的安全性,避免了使用传统纯刚性云台的失控对人员造成伤害。
相对于传统纯刚性云台关节由于其难以凭借较大的传动比使得末端能产生较大的力矩以承受较高的负载,而本发明实施例中采用绳索驱动的方式实现三轴云台关节的运动,具有一定的传动比且较为精确,而且在保证减少空间体积的情况下实现扭矩的传递,更优于传统减速机构的驱动方式,即可解决传统云台负载较低的问题,并且相比传统的减速机构具有噪声低、传递路径灵活等优点,相比直驱的方式可调整不同的输出转轴外径比率,提高系统的减速比,升输出轴的扭矩,直接提升了云台关节的负载能力;维持系统柔性保证人机交互的安全性;还采用紧密结合布局,使整体三轴云台关节所占空间达到最小,将驱动源(电机)布置于靠近基座的位置,调整质心位置,以减少系统的转动惯量,提升系统的灵活性,同时也能使机构紧密结合,使其所占空间尽量最小,达到高度集成化;
本发明实施例采用模块化布置方式,并且采用较易于检修且容易观察内部工作状况的外部镂空设计,其采用模块拆分的形式,连接迅速且稳定,利于三轴云台关节的部件更换与检修;还采用串联布置方式,可以避免因为某个元件出现故障而导致整个三轴云台关节的失效,降低其与其它关节连接的耦合性;采用轻量化设计,使三轴云台关节在保持较低质量的同时具有高强度的稳定性能,提升其运动性能,为后续进行柔顺驱动控制打下基础。
本发明实施例中低转动惯量且保证强度的绳驱三轴云台关节,采用大截面碳纤维、铝合金等材料保证其强度,实现较为轻量化。并合理的绳索张紧对绳索进行张紧。
本发明实施例的一些设计还有利于分布电气线缆。例如,各关节拥有大中空的关节转盘,方便电气线缆从中间穿过;连接支架拥有较多的镂空,在电气线缆攀附于其上的时候可借助这些孔位镂空进行扎带的穿接和线缆的固定。连接支架拥有较多镂空的同时中间通过铝柱连接,线缆可以攀附于铝柱上,同理可采用扎带进行固定。关节固定盘下端镂空可以通过电气线缆,进而对偏航轴电机进行供电与通信,达到内置关节线缆的目的。
本发明实施例的三轴云台关节的典型应用如下:
本三轴云台关节可将其基座固定于其它支架上,即可以通过其上的螺钉紧固连接至其它支架上,在保证电机均连接上电源,电气线缆布置好之后,连接完控制器后即可进行三个轴(俯仰轴、滚转轴、偏航轴)的各自转动以及同时关节转动实现同轴插补,使末端达到相应的关节位姿,而输出的关节位姿可用于其它方面的操作,比如在末端添加摄像机、望远镜等设备可以实现拍摄、监控、天文观测功能。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干等同替代或明显变型,而且性能或用途相同,都应当视为属于本发明的保护范围。
- 一种基于串联弹性驱动器的柔顺关节机械臂
- 一种基于绳索驱动实现云台姿态调整的抛射机器人
- 一种三轴串联式旋转关节机器人