一种茶树幼苗的种植装置
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及茶树种植设备领域,具体是一种茶树幼苗的种植装置。
背景技术
随着茶产业的迅速发展,人工茶基地面积不断扩大,对茶树幼苗的需求量也越来越大,因此需要对茶树幼苗进行大面积的种植。
现有的在茶树幼苗种植,一般是通过铲刀等农具挖掘,人工手持着铲刀的手柄,再操作铲刀对种植土地进行挖洞,然后放入茶树幼苗,进行填土实现茶树幼苗种植,这种作业方式对种植人员体力消耗过大,且种植效率低下;因此,针对上述问题提出一种茶树幼苗的种植装置。
发明内容
为了弥补现有技术的不足,现有的在茶树幼苗种植,一般是通过铲刀等农具挖掘,人工手持着铲刀的手柄,再操作铲刀对种植土地进行挖洞,然后放入茶树幼苗,进行填土实现茶树幼苗种植,这种作业方式对种植人员体力消耗过大,且种植效率低下的问题,本发明提出一种茶树幼苗的种植装置。
本发明解决其技术问题所采用的技术方案是:本发明所述的一种茶树幼苗的种植装置,包括环形手持板和固定筒;所述环形手持板的底部转动连接有固定筒;所述固定筒的外侧固接有绞笼片;所述固定筒的内侧壁开设有一组滑动槽,且滑动槽内通过滑块滑动连接有挡土板,且挡土板的底部固接有扇形铲土板;所述扇形铲土板的顶部开设有翻转通槽,且翻转通槽内通过转轴转动连接有翻转板;所述翻转板的一侧固接有第一T形块,且第一T形块的一端贯穿扇形铲土板伸入滑动槽内;所述挡土板的一侧设有翻滚件,且翻滚件带动第一T形块翻滚;一组所述扇形铲土板的内侧固接有滑动筒;所述滑动筒内滑动连接延伸筒;所述延伸筒的外侧固接有一对对称分布的压板;所述压板的顶部设有拉动件,且延伸筒向下滑动通过拉动件带动滑动筒向上滑动;所述环形手持板底部带动转动件,且固定筒通过转动件带动旋转。
优选的,所述翻滚件包括滑动通槽;所述固定筒的内侧开设有一组滑动通槽,且滑动通槽与滑动槽相连通;所述滑动通槽内滑动连接有第二T形块;所述第二T形块与第一T形块的顶部均开设有一对对称分布的摆动槽;一组所述摆动槽内通过转轴转动连接有翻滚杆;所述第二T形块的一端与挡土板一侧相转动连接;且第二T形块的另一端伸出滑动通槽固接有手栓。
优选的,所述拉动件包括环形块;所述滑动筒的顶部转动连接有环形块,且环形块的顶部开设有第一通孔;所述压板的顶部固接有固定块;所述环形手持板的顶部固接有一组对称分布的支撑杆;所述支撑杆的一侧固接有引导轴,且引导轴与第一通孔位置相对应;所述第一通孔内固接有拉绳,且拉绳的一端贯穿压板并通过引导轴与固定块相固接;所述压板的外侧设有限位件,且压板的上下移动高度通过限位件控制。
优选的,所述转动件包括电机;所述环形手持板的底部固接电机,且电机的顶部输出端固接有第一齿轮;所述固定筒的外侧固接有一组齿块,且齿块与第一齿轮相啮合。
优选的,所述限位件包括限位板;所述环形手持板的顶部固接一对对称分布的限位板,且限位板一侧开设有限位通槽;所述限位通槽内侧与压板外侧相滑动连接;所述限位通槽的侧壁开设有移动通槽,且移动通槽内滑动连接有斜块;所述限位板的一侧固接有移动块,且移动块与移动槽的位置相对应;所述移动块一侧开设有移动槽,且移动槽与移动通槽相连通;所述移动槽的侧壁与移动块一侧通过弹簧相固接;所述移动块的一端固接拉动柱,且拉动柱的一端贯穿移动块固接有拉杆。
优选的,所述扇形铲土板的底部固接有一组松土柱。
优选的,所述环形手持板的两侧均固接把手。
优选的,所述固定筒的外侧固接有环形支撑板。
本发明的有益之处在于:
1.通过手持环形手持板,将固定筒前方的绞笼片放入需要种植的土地上,然后开启转动件,带动固定筒转动,从而带动绞笼片片转动,方便设备对泥土钻孔,同时固定筒带动扇形铲土板转动,使扇形铲土板底部接触的泥土通过斜面将泥土运到扇形铲土板上方,堆积在固定筒内,到达一定深度后,下压压板,带动延伸筒向下滑动,通过拉动件带动滑动筒向上滑动,这时延伸筒向下运动,滑动筒向上运动,延伸筒的底部与滑动筒底部的泥土相接触,将滑动筒底部泥土挤压掉落后,在延伸筒内放置一株茶树幼苗,在转动翻滚件,使扇形铲土板上的翻转板翻转倾斜,从而使固定筒内的泥土掉落掩盖在茶树幼苗的根部;从而达到对茶树幼苗根部自动盖土的效果,减少人员种植步骤,从而提高种植效率。
2.通过转动手栓,带动第二T形块转动,从而带动翻滚杆上下摆动,从而带动第一T形块上下摆动,使翻转板倾斜,从而使固定筒内的泥土掉落,达到对茶树幼苗根部自动盖土的效果,从而提高种植效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
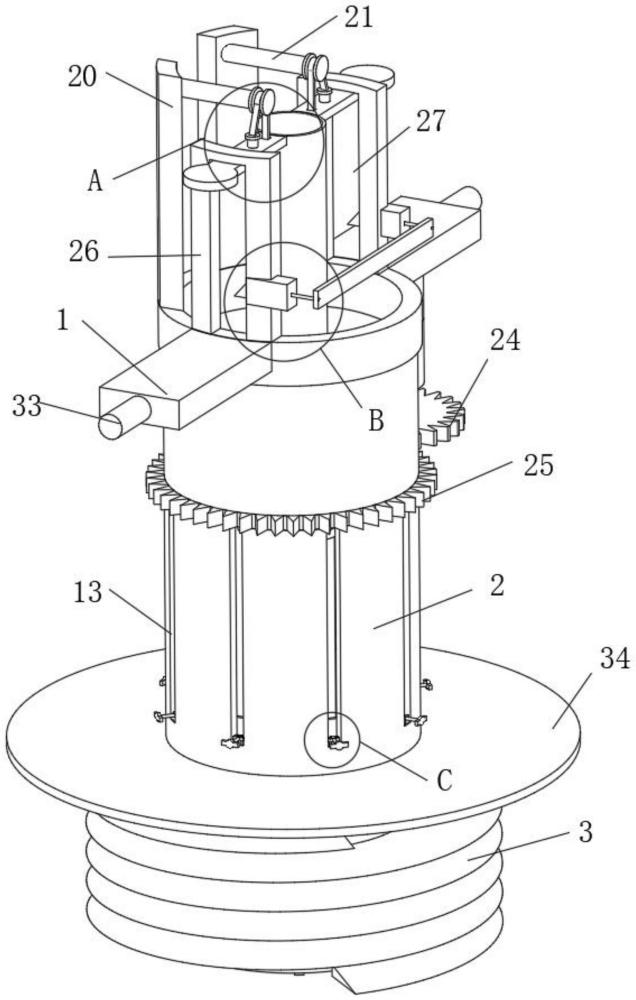
图1为本发明的立体图;
图2为1中A处的局部放大图;
图3为1中B处的局部放大图;
图4为图1中C处的局部放大图;
图5为本发明的局部剖面图;
图6为图5中D处的局部放大图;
图7为图5中E处的局部放大图;
图8为图5中F处的局部放大图;
图9为本发明的部分立体图;
图10为图9中G处的局部放大图;
图11为发明的局部剖面图。
图中:1、环形手持板;2、固定筒;3、绞笼片;4、滑动槽;5、挡土板;6、扇形铲土板;7、翻转板;8、翻转通槽;9、第一T形块;10、滑动筒;11、延伸筒;12、压板;13、滑动通槽;14、第二T形块;15、翻滚杆;16、手栓;17、环形块;18、第一通孔;19、固定块;20、支撑杆;21、引导轴;22、拉绳;23、电机;24、第一齿轮;25、齿块;26、限位板;27、限位通槽;28、斜块;29、移动块;30、拉动柱;31、拉杆;32、松土柱;33、把手;34、环形支撑板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1-11所示,一种茶树幼苗的种植装置,包括环形手持板1和固定筒2;所述环形手持板1的底部转动连接有固定筒2;所述固定筒2的外侧固接有绞笼片3;所述固定筒2的内侧壁开设有一组滑动槽4,且滑动槽4内通过滑块滑动连接有挡土板5,且挡土板5的底部固接有扇形铲土板6;所述扇形铲土板6的顶部开设有翻转通槽8,且翻转通槽8内通过转轴转动连接有翻转板7;所述翻转板7的一侧固接有第一T形块9,且第一T形块9的一端贯穿扇形铲土板6伸入滑动槽4内;所述挡土板5的一侧设有翻滚件,且翻滚件带动第一T形块9翻滚;一组所述扇形铲土板6的内侧固接有滑动筒10;所述滑动筒10内滑动连接延伸筒11;所述延伸筒11的外侧固接有一对对称分布的压板12;所述压板12的顶部设有拉动件,且延伸筒11向下滑动通过拉动件带动滑动筒10向上滑动;所述环形手持板1底部带动转动件,且固定筒2通过转动件带动旋转;工作时,通过手持环形手持板1,将固定筒2前方的绞笼片3放入需要种植的土地上,然后开启转动件,带动固定筒2转动,从而带动绞笼片3片转动,方便设备对泥土钻孔,同时固定筒2带动扇形铲土板6转动,使扇形铲土板6底部接触的泥土通过斜面将泥土运到扇形铲土板6上方,堆积在固定筒2内,到达一定深度后,下压压板12,带动延伸筒11向下滑动,通过拉动件带动滑动筒10向上滑动,这时延伸筒11向下运动,滑动筒10向上运动,延伸筒11的底部与滑动筒10底部的泥土相接触,将滑动筒10底部泥土挤压掉落后,在延伸筒11内放置一株茶树幼苗,在转动翻滚件,使扇形铲土板6上的翻转板7翻转倾斜,从而使固定筒2内的泥土掉落掩盖在茶树幼苗的根部;从而达到对茶树幼苗根部自动盖土的效果,减少人员种植步骤,从而提高种植效率。
所述翻滚件包括滑动通槽13;所述固定筒2的内侧开设有一组滑动通槽13,且滑动通槽13与滑动槽4相连通;所述滑动通槽13内滑动连接有第二T形块14;所述第二T形块14与第一T形块9的顶部均开设有一对对称分布的摆动槽;一组所述摆动槽内通过转轴转动连接有翻滚杆15;所述第二T形块14的一端与挡土板5一侧相转动连接;且第二T形块14的另一端伸出滑动通槽13固接有手栓16;工作时,通过转动手栓16,带动第二T形块14转动,从而带动翻滚杆15上下摆动,从而带动第一T形块9上下摆动,使翻转板7倾斜,从而使固定筒2内的泥土掉落,达到对茶树幼苗根部自动盖土的效果,从而提高种植效率。
所述拉动件包括环形块17;所述滑动筒10的顶部转动连接有环形块17,且环形块17的顶部开设有第一通孔18;所述压板12的顶部固接有固定块19;所述环形手持板1的顶部固接有一组对称分布的支撑杆20;所述支撑杆20的一侧固接有引导轴21,且引导轴21与第一通孔18位置相对应;所述第一通孔18内固接有拉绳22,且拉绳22的一端贯穿压板12并通过引导轴21与固定块19相固接;所述压板12的外侧设有限位件,且压板12的上下移动高度通过限位件控制;工作时,通过向下压压板12,带动延伸筒11向下运动,带动拉绳22向下运动,通过引导轴21使环形块17固接的拉绳22向上运动,从而带动滑动筒10向上运动,使延伸筒11疏通滑动筒10内部的泥土,在通过限位件固定滑动筒10和延伸筒11的移动高度,从而解放双手,对延伸筒11内放入茶树幼苗,进行种植。
所述转动件包括电机23;所述环形手持板1的底部固接电机23,且电机23的顶部输出端固接有第一齿轮24;所述固定筒2的外侧固接有一组齿块25,且齿块25与第一齿轮24相啮合;工作时,通过开启电机23,带动第一齿轮24转动,带动齿块25运动,从而带动固定筒2转动,从而相泥土进行钻孔运动,减少种植人员的体力操作,从而提高种植效率。
所述限位件包括限位板26;所述环形手持板1的顶部固接一对对称分布的限位板26,且限位板26一侧开设有限位通槽27;所述限位通槽27内侧与压板12外侧相滑动连接;所述限位通槽27的侧壁开设有移动通槽,且移动通槽内滑动连接有斜块28;所述限位板26的一侧固接有移动块29,且移动块29与移动槽的位置相对应;所述移动块29一侧开设有移动槽,且移动槽与移动通槽相连通;所述移动槽的侧壁与移动块29一侧通过弹簧相固接;所述移动块29的一端固接拉动柱30,且拉动柱30的一端贯穿移动块29固接有拉杆31;工作时,通过压板12向下运动,移动到斜块28时,与斜块28接触,通过摩擦,将斜块28挤压到移动通槽内,当压板12穿过斜块28区域后,斜块28通过弹簧设置从新弹回去,对压板12进行限位,从而解放种植人员双手,进行下一步操作,在拉动拉杆31,带动斜块28移动,从而解除压板12限制,方便下一次种植。
所述扇形铲土板6的底部固接有一组松土柱32;工作时,通过扇形铲土板6转动带动松土柱32带动,对泥土有搅拌效果,从而使泥土变得松软,使土更容易进入固定筒2内,方便人员操作。
所述环形手持板1的两侧均固接把手33;工作时,通过把手33设置,方便工作人员使用此设备。
所述固定筒2的外侧固接有环形支撑板34;工作时,通过环形支撑板34设置,在设备打孔到一定深度后,环形支撑板34与地面接触,支撑设备不会倾斜,方便种植人员操作。
工作原理,通过手持环形手持板1,将固定筒2前方的绞笼片3放入需要种植的土地上,然后开启转动件,带动固定筒2转动,从而带动绞笼片3片转动,方便设备对泥土钻孔,同时固定筒2带动扇形铲土板6转动,使扇形铲土板6底部接触的泥土通过斜面将泥土运到扇形铲土板6上方,堆积在固定筒2内,到达一定深度后,下压压板12,带动延伸筒11向下滑动,通过拉动件带动滑动筒10向上滑动,这时延伸筒11向下运动,滑动筒10向上运动,延伸筒11的底部与滑动筒10底部的泥土相接触,将滑动筒10底部泥土挤压掉落后,在延伸筒11内放置一株茶树幼苗,在转动翻滚件,使扇形铲土板6上的翻转板7翻转倾斜,从而使固定筒2内的泥土掉落掩盖在茶树幼苗的根部;从而达到对茶树幼苗根部自动盖土的效果,减少人员种植步骤,从而提高种植效率,通过转动手栓16,带动第二T形块14转动,从而带动翻滚杆15上下摆动,从而带动第一T形块9上下摆动,使翻转板7倾斜,从而使固定筒2内的泥土掉落,达到对茶树幼苗根部自动盖土的效果,从而提高种植效率,通过向下压压板12,带动延伸筒11向下运动,带动拉绳22向下运动,通过引导轴21使环形块17固接的拉绳22向上运动,从而带动滑动筒10向上运动,使延伸筒11疏通滑动筒10内部的泥土,在通过限位件固定滑动筒10和延伸筒11的移动高度,从而解放双手,对延伸筒11内放入茶树幼苗,进行种植,通过开启电机23,带动第一齿轮24转动,带动齿块25运动,从而带动固定筒2转动,从而相泥土进行钻孔运动,减少种植人员的体力操作,从而提高种植效率,通过压板12向下运动,移动到斜块28时,与斜块28接触,通过摩擦,将斜块28挤压到移动通槽内,当压板12穿过斜块28区域后,斜块28通过弹簧设置从新弹回去,对压板12进行限位,从而解放种植人员双手,进行下一步操作,在拉动拉杆31,带动斜块28移动,从而解除压板12限制,方便下一次种植,通过扇形铲土板6转动带动松土柱32带动,对泥土有搅拌效果,从而使泥土变得松软,使土更容易进入固定筒2内,方便人员操作,通过把手33设置,方便工作人员使用此设备,通过环形支撑板34设置,在设备打孔到一定深度后,环形支撑板34与地面接触,支撑设备不会倾斜,方便种植人员操作。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
- 一种增加茶树种植土壤营养的肥料
- 一种茶树的插育种植方法
- 一种茶树种植方法
- 一种油茶树种植专用肥料
- 一种提高油茶树种植土壤肥力的肥料
- 一种茶树幼苗的种植装置
- 一种茶树种植用幼苗培育装置