基于人脑海马体纵向结构的表面形态测量方法及处理设备
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及图像处理技术领域,具体而言,涉及一种基于人脑海马体纵向结构的表面形态测量方法及处理设备。
背景技术
海马体(Hippocampus),又名海马回、海马区、大脑海马,位于大脑丘脑和内侧颞叶之间,属于边缘系统的一部分。海马体是阿尔兹海默病等神经退行性疾病十分重要的生物标志物,通过研究它的形态及其变化可以在很大程度上预测是否存在发展为相关疾病的风险或推断相关疾病的病程。即为了满足医疗及研究等目的,需要构建海马体的形态模型,以表征和测量海马体的表面形态特征。
如相关技术中,通常采用球谐描述(SPHARM-PDM)、离散化骨架表示(discreteskeletal representation,ds-rep)以及连续性内侧表示(Continuous medialrepresentation,cm-rep)。
但是,上述相关技术中构建的海马体形态模型,都与实际不符,从而无法为其形态测量提供依据。如通过SPHARM-PDM构建的海马体形态模型,其生成的长轴在海马体头部没有沿着纵向弯曲,在海马体尾部尖端的指向也不够准确。而ds-rep生成的海马体模型的曲面无法准确描述海马体头部特征,在头部,曲面和长轴的走势均不符合实际海马体的形态;对于cm-rep,其与ds-rep类似,所生成形态模型中的曲面在海马体头部也不符合真实形态,并且没有直接生成长轴,在曲面弯曲处还出现了奇异点。
发明内容
本发明解决的问题是如何构建逼真的海马体形态模型以及准确的测量海马体形态。
为解决上述问题,第一方面,本发明提供了一种基于人脑海马体纵向结构的表面形态测量方法,包括:
获取待处理图像中海马体的边界信息,该边界信息表示该海马体的原始边界表面;
根据该边界信息构建该海马体的内接中轴面;
将第一矩形网格共形映射至该内接中轴面上,得到该内接中轴面的网格曲面,该网格曲面的中心位置的纵向坐标线表示该海马体的长轴,该网格曲面的横向坐标线表示该海马体的层级结构,该纵向坐标线与该横向坐标线垂直,该纵向坐标线与该内接中轴面及齿状回-海马角边界的交线的距离不大于预设值;
在该网格曲面上生成目标辐轴,该目标辐轴的顶点指向该海马体的边界表面,且该目标辐轴的所有顶点对应的曲面为该海马体的目标边界表面;
基于该目标辐轴及该内接中轴面,生成该海马体的形态模型,该形态模型中包括该海马体的目标边界表面、层级结构及长轴,该目标边界表面、层级结构及该长轴用于表征该海马体的形态特征。
第二方面,本发明提供了一种处理设备,该处理设备包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,该处理器执行该程序时实现如上所述第一方面所述的基于人脑海马体纵向结构的表面形态测量方法
本发明提供的基于人脑海马体纵向结构的表面形态测量方法及处理设备,对于获取的待处理的图像,首先可以提取其中的海马体的边界信息,进而根据该边界信息计算海马体的内接中轴面,使得生成的内接中轴面的最中心的纵向轴线被拟合为与海马体的齿状回-海马角边界大致一致的长轴。进而在内接中轴面上生成从内接中轴面指向海马体边界表面的目标辐轴,最终以内接中轴面和目标辐条为基础生成具有层级结构和长轴的海马体结构,实现了海马体形态模型的构建。即本发明实施例中,通过生成海马体的内接中轴面作为基础框架,进而在其上构建指向海马体表面边界的矢量场,即辐轴,使得利用基础框架及其上的矢量场构建了海马体形态模型,其遵循海马体的纵向层状组织,且与实际结构匹配良好的长轴,能够为海马体的各形态特征参数的精确测量提供准确依据,为海马体的解剖学研究及临床使用提供真实的结构特征。
附图说明
图1为本发明一些实施例提供的磁共振图像中的海马体区域示意图;
图2为本发明一些实施例提供的海马体解剖学纵向组织结构示意图;
图3为相关技术中海马体形态模型构建结果示意图;
图4为本发明一些实施例提供的磁共振图像的基于人脑海马体纵向结构的表面形态测量方法的结构示意图;
图5为本发明一些实施例提供的磁共振图像的海马体形态模型构建的框架示意图;
图6为本发明一些实施例提供的磁共振图像的基于人脑海马体纵向结构的表面形态测量方法的结构示意图;
图7为本发明一些实施例提供的磁共振图像的基于人脑海马体纵向结构的表面形态测量方法的结构示意图;
图8为本发明实施例中共形映射的原理示意图;
图9为本发明一些实施例提供的磁共振图像的基于人脑海马体纵向结构的表面形态测量方法的结构示意图;
图10为本发明实施例的纵向坐标连线及层间分界点的分布示意图;
图11为本发明实施例提供的处理设备的计算机系统的结构示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
可以理解,对于通过医疗设备获取的医学图像,如通过非侵入式的核磁共振(MRI)成像技术生成的医学图像,在进行医学需要的识别处理时,通常需要对获取的医学图像中的器官或组织所在区域进行分割处理,如临床医生需要借助图像分割手段对获取的医学图像进行手动或者半自动的分割,以识别出重点关注的区域,如病灶区等,实现医学图像的实际意义。
对于通过MRI技术,可以生成体现人体器官组织形态的多模态图像,如脑部形态、肺部形态或骨骼形态等医学图像,具体能够生成包括T1加权成像、T2加权成像、T1ce成像和自由水抑制序列(FLAIR)等的多模态图像数据。
如图1所示,为通过核磁共振采集的脑部影像数据,其中间的高亮部分显示了海马体轮廓。
如图2所示,为海马体的纵向结构示意图。由图2可知,海马体的功能组织遵循一个连续的纵向梯度,即解剖学研究表明海马体是沿着纵向的层状结构进行排列:海马体主要细胞的轴突是平行分布的,形成非常细的带状排列,又称为“层(lamella)”,即纵向层间连接,这些层几乎垂直于海马的长轴;同时,每一层上遵循固定的信息传输模式,即横向功能单元中,内嗅皮层输入信号从穿透通路传输到齿状回(dentate gyrus,DG),再到海马角(cornu ammonis,CA,具体包括CA1、CA2、CA3),即CA3,CA3再将信号传入到CA2和CA1(cornuammonis),处理后的信息经过SUB(subiculum,下托)返回内嗅皮层,形成一个信息回路,这一回路被称为“三突触通路(trisynaptic circuit)”,每一层上的三突触回路形成海马体的一个功能单元。由此表明海马体的功能单元以垂直于海马长轴的层状结构分布,如图2所示。在其头部,分布有海马趾,且钩回的形态下形成垂直钩。
可以理解,实际中,生命体中的海马体是负责记忆处理、学习、空间导航和情绪的重要大脑结构,容易受到各种神经退行性疾病的侵袭。因此,海马体的形态模型的识别及构建,对于医学研究及应用非常重要,即通过构建的形态模型来测量、表征海马体的各种参数,能够为医学应用等提供科学依据。
相关技术中,通过采用球谐描述(Spherical harmonic description,SPHARM-PDM)、离散化骨架表示(discrete skeletal representation,ds-rep)及连续性内侧表示(Continuous medial representation,cm-rep)来构建海马体形态模型。
对于相关技术的方法,所构建的海马体形态模型,生成的长轴在海马体头部没有沿着纵向弯曲,在海马体尾部尖端的指向也不够准确。或者,所生成的海马体曲面无法准确描述海马体头部特征,在头部,曲面和长轴的走势均不符合实际海马体的形态。如图3上半部分所示,右侧为实际的海马体形态。
本发明实施例中,为了构建出符合真实形态的海马体形态模型,以实现海马体的形态特征的准确测量,结合图5所示,对于采集的磁共振(MRI)海马体图像(该图像捕捉了海马体的平均解剖结构)。采用两阶框架,即首先,根据海马的几何对称性建立一个内部坐标系统,该坐标系统表示为海马内部的内接中轴面(inscribed medial surface,IMS),IMS中心的纵向坐标线可以定义为海马体长轴,横向坐标线与纵向坐标线垂直,与层级结构相对应,即横向坐标线可以表示海马体的层级结构。进一步,利用该IMS,通过引入中轴几何约束,对边界表面进行重塑,最后采用共形映射将海马表面展开到一个公共平面坐标系中,完成海马体形态模型的构建。如图3下半部分所示,其长轴及形态符合右侧的真实形态。
可以理解,本发明实施例中利用上述方法构建的海马体形态模型,其作为轴参照形态模型(axis-referenced morphometric model,ARMM),结构遵循纵向层状组织,能够在海马体图像上建立具有解剖学意义结构特征。另外,ARMM可以沿着其整个长轴测量海马形态与表面信息,并允许使用统一的平面正交坐标系在不同形态的个体之间稳定地配准不同个体的海马形态。并且,ARMM可在AD早期的海马前部观察到分布在同一层上的局部萎缩,通过捕捉这种由于神经退行性变引起的形状变化的独特特征。最后,ARMM还可以应用于研究海马的纵向异质性并成为识别神经退行性疾病的新结构标记物。
为了更好的理解和说明本发明实施例提供的基于人脑海马体纵向结构的表面形态测量方法,下面通过附图详细阐述。
该方法可以由具有数据存储及处理功能的处理设备执行。
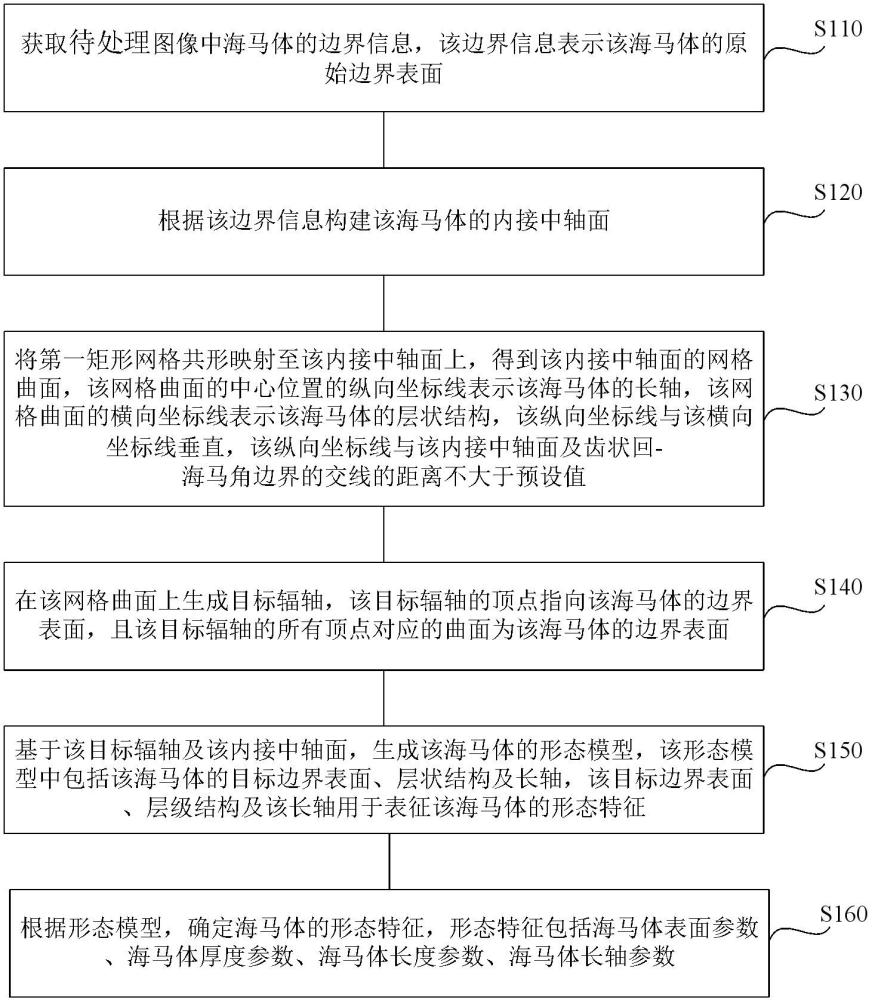
图4所示为本发明实施例提供的磁共振图像的基于人脑海马体纵向结构的表面形态测量方法的流程示意图,如图4所示,该方法具体包括:
S110,获取待处理图像中海马体的边界信息,该边界信息表示该海马体的原始边界表面。
S120,根据该边界信息构建该海马体的内接中轴面。
S130,将第一矩形网格共形映射至该内接中轴面上,得到该内接中轴面的网格曲面,该网格曲面的中心位置的纵向坐标线表示该海马体的长轴,该网格曲面的横向坐标线表示该海马体的层级结构,该纵向坐标线与该横向坐标线垂直,该纵向坐标线与该内接中轴面及齿状回-海马角边界的交线的距离不大于预设值。
S140,在该网格曲面上生成目标辐轴,该目标辐轴的顶点指向该海马体的边界表面,且该目标辐轴的所有顶点对应的曲面为该海马体的边界表面。
S150,基于该目标辐轴及该内接中轴面,生成该海马体的形态模型,该形态模型中包括该海马体的目标边界表面、层级结构及长轴,该目标边界表面、层级结构及该长轴用于表征该海马体的形态特征。
具体地,结合图5所示,本发明实施例中,首先可以直接获取待处理图像中的海马体的边界信息。或者,也可以先获取待处理图像,进而对待处理图像中的海马体进行识别分割,以得到海马体的边界信息。
例如,可以利用神经网络的方法对待处理图像中的海马体进行识别分割,以提取到表示海马体所在区域的标签图像。则可以从海马体标签区域中提取其边界信息。
该待处理图像可为一个来自解剖学和7T-MRI的海马体图像,对应的边界信息可以存储为三角网格文件,如图5中的(a)所示。即本发明实施例中的海马体的边界信息,可以为海马体边界表面的三角网格。
进一步,在获取到海马体的边界信息后,可以利用该边界信息来构建生成海马体的内接中轴面(inscribed medial surface,IMS)。如图5中的(b)所示。
进一步,将二维平面上的矩形网格,即第一矩形网格共形映射至该IMS上,得到IMS的坐标线正交的网格曲面。如图5中的(c)所示。
可以理解,该二维平面的矩形网格,具有横坐标和纵坐标,其内部的所有网格顶点上的纵横坐标都是正交的排列方式。
对应的,共形映射,即共形参数化,其目的是将二维平面的矩形网格变成IMS的形状,同时保留该矩形网格的纵横坐标正交的排列方式。即原矩形网格的每个网格顶点,都对应于共形映射后的IMS上的一个顶点。共形映射后的IMS的横向坐标线与纵向坐标线几乎垂直,则正交的坐标线可作为构建海马体边界形态模型的依据。
还可以理解,通过共形映射后的IMS的网格曲面,其中心的纵向坐标线被配置为表示所要构建的海马体形态模型的长轴。横向坐标线被配置为表示该海马体的层级结构。该纵向坐标线与该横向坐标线垂直,该纵向坐标线与内接中轴面及齿状回-海马角边界的交线的距离不大于预设值,即作为海马体长轴的中心位置的纵向坐标线,需要将其配置为最靠近内接中轴面及齿状回-海马角边界的交线的纵向坐标线。
实际中,作为待构建的海马体形态模型的长轴的纵向坐标线,其在实际中,与内接中轴面与CA-DG边界的交线的距离可以被配置为不大于预设值。例如,在生成网格曲面后,可以通过手动的方式调节该纵向坐标线的位置,使得其为最接近IMS和CA-DG边界的交线,即两者处于重合或基本重合的位置。
进一步,在得到内接中轴面的网格曲面后,可以通过径向映射生成一个矢量场。该矢量场中的矢量的原点在IMS上,矢量的顶端指向海马体的边界表面,该矢量场中的向量在中轴几何中称为辐轴,即该发明实施例中的目标辐轴。如图5中的(d)所示。
该目标辐轴的顶点指向海马体的边界表面,且目标辐轴的所有顶点对应的曲面为海马体的边界表面。
最后,基于上述步骤中生成的目标辐轴以及内接中轴面,来生成海马体的形态模型。
如图5中的(e)所示,构建的海马体的形态模型,其以内接中轴面为基础框架,作为海马体形态模型,即轴参照模型(axis-referenced morphometric model,ARMM),该模型包括海马体的层级结构及长轴,该层级结构及长轴可以用于表征该海马体的各形态特征。
进一步,在通过上述步骤构建得到海马体的形态模型后,便可以利用所构建的形态模型,对海马体的表面特征进行精确测量。
即该方法还包括:
S160,根据形态模型,确定海马体的形态特征,形态特征包括海马体表面参数、海马体厚度参数、海马体长度参数、海马体长轴参数。
具体地,基于ARMM,本发明实施例中定义了一系列海马体形态的测量参数。如海马体表面参数、海马体厚度参数、海马体长度参数、海马体长轴参数等。
该海马体表面参数可以包括海马体的表面曲率。该海马体厚度参数包括海马体的上侧厚度、下侧厚度以及海马体的纵向解剖层的层厚度;海马体的长度参数包括海马体的宽度及长度。海马体长轴参数包括长轴长度、长轴曲率及海马趾曲率等。
可以理解,由于IMS位于海马体内部,且整个海马体边界表面沿IMS与边界表面的交线被切割为上表面和下表面,将海马体分为上下两部分。如图5所示,对于柱状的立体海马体结构,上表面为图中能够显示的曲面,下表面为被上表面遮挡的另一侧,即阴影部分。
对应的,从边界表面的网格顶点到IMS的距离被定义为局部厚度,在两个表面的顶点都有各自的局部厚度,称为上厚度和下厚度。
可以理解,基于该定义,则使得海马体表面上的任何顶点,都有可测量的厚度;并且,上/下表面与IMS之间的厚度是一个直线/欧氏距离,比拉普拉斯厚度更容易解释为片状的形状。
上述各个参数的具体含义,详见表1所示。
表1 海马体的形态特征及其测量
可以理解,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量方法,对于获取的待处理的图像,首先可以提取其中的海马体的边界信息,进而根据该边界信息计算海马体的IMS,使得生成的IMS的最中心的纵向轴线拟合为与海马体的CA-DG边界大致一致的长轴。进而在IMS上生成从IMS指向海马体边界表面的目标辐轴,最终以IMS和目标辐条为基础生成具有层状结构和长轴的海马体表面,实现了海马体形态模型的构建。
即本发明实施例中,通过生成海马体的内接中轴面作为基础框架,进而在其上构建指向海马体表面边界的矢量场,即辐轴,使得利用基础框架及其上的矢量场构建了海马体形态模型,即轴参照模型(axis-referenced morphometric model,ARMM),其遵循海马体的纵向层状组织,且与实际结构匹配良好的长轴,能够为海马体的表面形态的各特征参数的精确测量提供准确依据,为海马体的解剖学研究及临床使用提供真实的结构特征。
另外,本发明实施例所构建的形态模型,允许使用统一的平面正交坐标系在不同形态的个体之间稳定地配准不同个体的海马形态。还可以在AD早期的海马前部观察到分布在同一层上的局部萎缩,通过捕捉这种由于神经退行性变引起的形状变化的独特特征。ARMM有希望应用于研究海马的纵向异质性并成为识别神经退行性疾病的新结构标记物。
可选地,如图6所示,本发明一些实施例中,在S120中,根据提取的边界信息来构建海马体的中轴面,具体采用如下步骤:
S121,根据边界表面计算海马体的维诺图。
具体地,首先可以根据提取的边界信息来计算海马体对应的维诺(Voronoi)图。
可以理解,本发明实施例中的Voronoi图,是由一组连接两邻点直线的垂直平分线组成的连续多边形组成。每个维诺图中包括四个数据结构:生成元点(Voronoi Site)、维诺顶点(Voronoi Vertex)、维诺边(Voronoi Edge)及维诺区域(Voronoi Cell)。
其中,生成元点(Voronoi Site),即为输入点。Voronoi顶点(Voronoi Vertex),每两个生成元点之间存在一条垂直平分线,每两条垂直平分线产生一个交点,该交点称为Voronoi顶点。Voronoi边,为落在相邻两个生成元点的垂直平分线上一条边,即通过Voronoi顶点构成。Voronoi区域包含单个生成元点的Voronoi边围成的区域。
可选地,本发明一些实施例中,在S121中,具体可以采用Delaunay三角剖分算法来生成维诺图,即采用基于Delaunay三角剖分算法的Voronoi图生成方式,下面介绍如何生成Voronoi图。
即Delaunay三角剖分算法,输入一个点云,输出一个由点云计算出的三角网格。由于本发明实施例中输入的边界信息已经为三角网格,故可跳过生成三角网的步骤,直接记录三角网格每个三角形由哪三个离散点构成。计算每个三角形的外接圆圆心并记录。遍历三角形链表,寻找与当前三角形三边共边的相邻三角形TriA,TriB,TriC。若找到,则把寻找到的三角形的外心与与与当前三角形外心连接,存入Voronoi边链表中。若没找到,则当前三角形处于边界,求出最外侧边的中垂线存入Voronoi链表中。
最后,遍历结束,所有Voronoi边被找到,根据Voronoi边画出Voronoi图。
可以理解,还可以采用其他方法来生成维诺图,如分治法、扫描线算法等,本发明对此不做限制。
S122,基于该维诺图,构建海马体的近似内接中轴面。
具体地,在通过上述步骤生成海马体对应的维诺图后,可以提取所创建的维诺图中的点云文件,进行非均匀有理B样条(Non-Uniform Rational B-Splines,Nurbs)曲面拟合,构成Nurbs曲面,即作为海马体内部的近似中轴面。最后,可以将该近似中轴面进行扩展处理,得到与海马体边界表面相接,且其中的网格均匀分布的海马体内接中轴面。
例如,可以提取出上述步骤中生成的Voronoi图的Voronoi顶点的点云文件,进行Nurbs曲面拟合。
可以理解,Nurbs的特点为改变局部控制点并不会影响曲线整体形态,而仅仅改变当前控制点所控制的样条区间的形态。通过集合U与V两个方向的Nurbs曲线,构成Nurbs曲面。
本发明实施例中通过点云生成Nurbs曲面采用了3D造型软件Rhino的插件RhinoResurf,通过输入Voronoi图的顶点点云文件,生成其拟合的Nurbs曲面,该曲面可以作为一个位于海马体内部的近似中轴曲面。
可以理解,上述步骤所拟合的Nurbs曲面仅为一个近似的中轴曲面,它比理想的中轴曲面要小,曲面边缘并未与海马体边界表面相接;此外,该曲面的网格分布并不均匀。
基于此,本发明实施例中,通过使用三维几何处理系统Meshlab中的插值与重排插件,将Nurbs曲面向外平滑延伸,直至海马体的边界表面,生成内接中轴面。即该方法还包括:
S123,对该近似内接中轴面进行延伸,生产内接中轴面。
具体地,在实际操作中,插值插件可以选择Subdivision Surface:Loop,将Nurbs曲面从边缘向四周平滑插值,直至边界表面。重排插件选择Remeshing: IsotropicExplicit Remeshing,对插值后的Nurbs曲面进行重排,重排是指保留原曲面网格上的点,改变点与点之间连接成网格的方式,使网格面更均匀。
最后,将这个延伸后并与海马体边界表面相接的曲面称为内接中轴面(inscribedmedial surface,IMS),如图5中的(b)所示。
进一步,本发明一些实施例中,在通过上述步骤,生成海马体的内接中轴面后,为了实现海马体纵向的解剖表面的构建,可以利用共形映射的方式,将二维平面的矩形网格共形映射至上述的IMS上,得到坐标线正交的IMS的网格曲面,即将二维平面的矩形网格变成IMS的形状,且保留矩形网格的纵横坐标正交的排列方式。
即如图7所示,S130具体包括如下步骤:
S131,构建第一矩形网格,该第一矩形网格内部坐标线正交。
S132,将该第一矩形网格共形映射至内接中轴面上,得到该内接中轴面的网格曲面。
S133,移动该网格曲面的中心位置的纵向坐标线,使得其与该内接中轴面及齿状回-海马角边界的交线的距离不大于预设值。
具体地,首先可以构建一张矩形网格,该矩形网格内部坐标线正交。如图8所示。
例如,所构建的矩形网络,其长边方向,即第二方向(u轴方向)取值(0,1),被17等分。短边方向,即第一方向(v轴方向)取值(0,0.2),被31等分。即该第一矩形网格可以由17×31=527个小的矩形面片构成。
可以理解,如图8所示,在共形映射生成的IMS网格曲面的边界上有四个人工定义的地标顶点,分别对应于原矩形网格的四个角。原矩形网格的长边,即u方向,对应于共形映射后IMS的纵向坐标线;原矩形网格的短边,即v方向,对应于共形映射后的IMS的横向坐标线。原矩形网格的每个网格顶点,都对应于共形映射后的IMS上的一个顶点。共形映射后的IMS的横向坐标线与纵向坐标线几乎垂直,这些正交的坐标线可作为重塑海马体边界表面的参考。
进一步,为了利用内接中轴面作为主框架,构建逼真的海马体形态模型,使得共形映射后的IMS的网格曲面的中心位置的纵向坐标线能够定义为海马体的长轴,则在对内接中轴完成共形映射后,可以将共形映射后的IMS网格曲面最中心的纵向坐标线调整为最接近IMS和CA-DG边界的交线,即使得该纵向坐标线被定义为本模型中海马体的长轴。
换言之,CA区域与DG区域是紧密连接,CA-DG边界即为分界面,处于海马体内部的,长轴即为该分界面与IMS的交线。如图5中的(c)所示的一条纵向坐标线。
其中,海马角(CA)区域包括的CA1、CA2及CA3,以及齿状回(DG)区域包括的DG,以及SLRM。这些亚区在海马体边界表面上的分布如图5中的(a)所示。
可以理解,IMS与CA-DG边界的交线,即内接中轴面,位于海马体内部,同时CA、DG等亚区也是一个三维结构,具有厚度。图5中的(a)中显示的只是海马体的边界表面部分,也就是海马体的最外侧。
进一步,在上述步骤将矩形网格形变成IMS的形状,且保留矩形网格的横纵坐标线正交的排列方式后,可以确定其上的辐轴,以作为构建海马体形态的支撑结构。
即如图9所示,在S140中,具体包括如下步骤:
S141,在IMS的网格曲面上生成初始辐轴。
S142,基于配置的中轴几何条件,优化该初始辐轴,得到优化后的辐轴。
具体地,通过径向映射生成一个矢量场。矢量的原点在IMS上,矢量的顶端指向海马体的边界表面,则这些向量在中轴几何中称为辐轴。
每个矢量被初始化为该矢量所对应的IMS上顶点的单位法向量。对应的,即辐轴可以由(p,Q)表示,其中p代表位于IMS上的点,而Q表示p的相应矢量。
由于IMS位于海马体内部,将海马体分为上下两部分,则可以定义指向海马体上侧表面的辐轴为上辐轴,指向海马体下侧表面的辐轴为下辐轴。
进一步,为了使得所构建的初始辐轴能够精确的指向海马体表面边界,可以根据配置的几何条件来优化该初始辐轴。
例如,一些实施例中,为实现海马体形态模型的精确构建,以及海马体形态参数的精准测量,精确的辐轴需要满足中轴几何条件,如S表示海马体的原始边界表面,即步骤1所提取的边界信息对应的边界表面,
辐轴方向与原始边界表面垂直;
上辐轴与对应的下辐轴的长度相等。
则具体包括如下步骤:
首先,为确保重构形状的准确性,可以强制第一个条件严格成立,使辐轴顶端处于原始海马体边界表面上。
进一步,设置一个适当的阈值(夹角90°±5°)来限制辐轴与边界表面的非正交性,辐轴与边界表面的夹角用1-cos(
最后,由于海马体头部弯曲处的辐轴经常穿过边界表面,指向错误的位置,则通过强制执行第三个条件,然后逐渐调整辐轴方向,使其与边界表面近似正交。
则通过迭代上述三个步骤,并再次实现第一个条件,以获得最终的精确辐轴,即优化后的初始辐轴。
可以理解,该实施例中,上述步骤,使得内接中轴面上的辐轴满足中轴几何条件,实现了辐轴的初步优化。
还可以理解,由于辐轴在严格保持与边界表面正交的情况下,辐轴的自重叠将发生在海马体的弯曲部分(如海马体头部的褶皱),此时单纯连接辐轴顶端会导致生成的边界表面网格发生重叠。
进一步,本发明的一些实施例中,为了解决上述弯曲部分的缺陷,使重建的边界表面更规则,实现海马体形态的高精度构建,通过执行S143:
S143,对优化后的辐轴的顶点进行重排,得到重排后的辐轴顶点。
具体地,该顶点重排操作,包括如下步骤:
S01,将第二矩形网格映射至该原始边界表面,得到共形参数化后的原始边界表面,该第二矩形网格通过对该第一网格的细分得到。
具体地,首先,对于上述实施例中的创建的第一矩形网格,对其进行细分,使得矩形面片数由527增至5000+的量级,称为新矩形网格,即第二矩形网格。继而将其共形映射至原始边界表面,即S110中提取的边界信息对应的海马体边界表面,得到共形参数化后的原始边界表面,其表面精度与第二矩形网格相同。
可以理解,由于IMS与边界表面的交线将海马体的边界表面分为了上下两部分,则该步骤中,具体是将第二矩形网格共形映射至所切割出的上下表面,得到了横纵坐标线正交的上下边界表面。
S02,提取共形参数化后的该原始边界表面的网格顶点,得到网格顶点集。
S03,提取优化后的该辐轴的顶点,得到辐轴顶点集。
具体地,提取上述步骤生成的共形参数化后的原始边界表面上的所有网格顶点,得到网格顶点集,称为B。数量可以定义为5000以上。
同时,提取上述步骤中所优化后的辐轴矢量组的顶端,即一个点集,称为辐轴顶点集,如记为A,数量可以定义为527。
可以理解,由于上表面与下表面的辐轴均源于IMS,且IMS网格顶点为527。因此,上下辐轴矢量组中的辐轴数均为527。
S04,根据辐轴顶点集及网格顶点集中的顶点,确定该海马体的层间分界点。
具体地,在提取到上述的两个顶点集后,可以利用两个顶点集,来确定辐轴顶点集中的层间分界点,即辐轴顶点集中,对应海马体纵向层级结构中各层级的层间分界线的顶点分布情况。
即具体包括如下步骤:
S001,确定该辐轴顶点集中的顶点在该网格顶点集中对应的映射顶点,得到映射顶点集。
S002,根据映射顶点集确定二维映射平面,该二维映射平面中的第一顶点及第二顶点的纵向连线为层间分界线,该第一顶点与第二顶点的第一方向的坐标值的差不大于预设差值。
S003,确定各该层纵向连线的预设范围内的所有该映射顶点,作为该层间分界点。
具体地,首先,对于辐轴顶点集A中的每一个点,可以对应到在网格顶点集B中与它欧氏距离最近的点。即可以将辐轴顶点集中的所有顶点一一关联映射到海马体的边界表面上,得到了一个关联顶点集,简称为C。
可以理解,C是B的真子集,数量与A相同,都为527。
进一步,由于上述S01中共形参数化后的原始边界表面与第二矩形网格的共形映射关系,关联顶点集C中的每个点都在第二矩形网格上存在一个对应点。通过上述S01共形映射的逆变换,可将点集C表示在细分的矩形网格上,称为映射顶点集,称为D,数量与C中的顶点数量相同,都为527。
即辐轴顶端的点是一个三维坐标(A),通过最短欧氏距离原则,对应到它们在共形参数化后的边界表面(B)上对应的三维坐标点(C)。则对应的三维坐标点(C)这些三维坐标可以被唯一的定位在细分的第二矩形网格构成的二维平面上,表示为一个二维坐标(D),即根据映射顶点集确定了一个二维映射平面。
其中,该第二矩形网格构成的二维平面,与上述所创建的第一矩形网格类似,u方向,如第一方向的坐标可以取值(0~1),v方向,即第二方向的坐标可以取值(0~0.2)。
则对应的,该二维映射平面中的第一顶点及第二顶点的纵向连线为层间分界线。该第一顶点及该第二顶点的第一方向的坐标值的差不大于预设差值,即两个顶点中,u方向上的坐标值相同或接近,该预设差值可以为0.1。
例如,如图10所示,连接D中近似同一u值,v值分别为0与0.2的两个顶点,如第一顶点的坐标值为(0.6,0),第二顶点的坐标值为(0.68,0.2)。则这两个顶点的纵向连线对应于单个海马体边界表面上的一条横向坐标线,即可以理解为海马体层状模型中层与层间的分界线。
即该层间分界线,也可以理解为二维映射平面中连接第二矩形网格面上最靠近上下边界的映射顶点之间的连线。
对应的,D中沿着上述纵向连线分布的点对应着A中位于海马层间分界处的点,称为层间分界点,即能够确定各该纵向连线的附近的范围内的所有该映射顶点,作为该层间分界点。如图10所示。
可以理解,本发明实施例中,如图10所示,由于上述的辐轴优化中的三个中轴几何条件并不能保证所生成辐轴排列的均匀性,辐轴之间可能存在自交,导致重构的边界表面也出现自交现象,即使得层间分界点在矩形域中并不严格按照纵向连线分布,需要根据纵向连线,对层间分界点进行重排,使得其重排后作为对应的目标辐轴的顶点,即执行以下步骤。
S05,根据海马体的层间分界线,对确定的层间分界点重排,得到层间分界点的优化顶点,层间分界线为海马体纵向层级之间的界线。
S06,将各层间分界线对应的优化顶点共形映射至共形参数化后的原始边界表面,得到重排后的辐轴顶点。
具体地,为改善辐轴排列的不均匀性,需要将层间分界点均匀的重排在各条纵向连线附近,即可以将各纵向连线附近分布的层间分界点向纵向连线移动,得到层间分界点的优化顶点。如图10所示。
其中,在移动过程中,使得原来的层间分界点向纵向连线逼近重排的过程中,优化顶点可能会不出现在新矩形网格的网格顶点上的情况,此时,可以规定,将这些不在网格顶点处的优化顶点调整为与之欧氏距离最近的网格顶点。
即映射顶点集D中的点由于共形逆映射,每个点都处于第二矩形网格的网格顶点处,而纵向连线并不总是穿过矩形网格顶点,所以层间分界点在向纵向连线逼近的时候会出现优化点并不在矩形网格顶点的情况。因此,想要将优化后的顶点重新定位到共形映射后的海马体边界表面上,优化顶点必须处于矩形网格的网格顶点上,所以执行上述调整。
可以理解,实际中,可以对每一条横向坐标线重复上述操作,即可得到最终的重排顶点。
最后,将重排后的顶点共形映射至上述S01所生成的共形参数化后的上下表面,得到了重排后的辐轴顶端点,即将各层间分界线对应的所述优化顶点共形映射至共形参数化后的所述原始边界表面,得到重排后的辐轴顶点。
进一步,在完成上述步骤后,即对优化后的辐轴的顶点,根据层间分界线重排,得到重排后的辐轴顶点后,可以利用重排后的辐轴顶点进行目标辐轴的构建生成。即该执行S144。
S144,连接网格曲面上的网格顶点与对应的重排后的辐轴顶点,得到目标辐轴。
具体地,可以连接IMS上的网格顶点与重排后的辐轴顶点,生成最终辐轴,即目标辐轴。
可以理解,所有目标辐轴的顶点,所构成的平面,即为重构的海马体的目标边界表面。
可以理解,由于重排后的辐轴顶点对应的目标辐轴,将不再自重叠,从而使得边界表面不再自相交。
进一步,在完成上述步骤,即在得到内接中轴面的网格曲面,以及网格曲面上的目标辐轴后,可以利用网格曲面及目标辐轴构建海马体的形态模型。即执行S150。
具体包括如下步骤:
S151,连接该目标辐轴的顶点,生成该海马体的该目标边界表面;
S152,连接网格曲面中横向坐标线上的目标辐轴的顶点,生成海马体的层级结构。
具体地,平滑地连接所有目标辐轴的顶端,可以得到海马体的目标边界表面。
进一步,连接对应于同一IMS横向坐标线的辐轴尖端,可以构建得到海马体相邻两个层级结构的层间分界线,即所有的层间分界线一起构建了海马体的所有层级结构。
可以理解,线通过上述共形重参数化确保该层间分界线垂直于IMS上的长轴。
即该目标边界表面、内接中轴面的中心轴(即长轴)及所有层间分界线形成的层级结构共同构成海马体的形态模型,如图5中的(e)所示。
其中,该形态模型中的长轴的具体数值可以表示海马体的长轴参数,同一IMS横向坐标线的辐轴尖端可以表示海马体的层级结构。
如图5中的(e)所示,显示了一个具有22层和2mm间隔的海马体形态模型。
可以理解,由于共形映射建立了IMS和平面矩形之间的对应关系,径向映射建立了上下边界表面和IMS的对应关系,故海马体边界表面的亚区分布和局部曲率可以通过这些对应关系投影到二维平面上。即相当于将海马表面展开到二维平面,同时保持表面纹理的几何特性。
例如,为展示所构建的形态模型中海马体边界表面在二维平面上的映射关系,图5中的(f)所示,展示了一个沿着海马背侧纵向线展开的海马表面,并与一个二维坐标系相匹配。但并不作为模型的输出。
在该坐标系中,每条相同u值的直线对应于海马体上纵向层状结构中的一层。在观察海马体各亚区的拓扑时,SRLM在横切面上形成一个典型的“C”形,CA1、CA2、CA3、SUB亚区和部分DG亚区将“C”形的背外侧切成5个部分。“C”形的腹侧部分由DG和部分CA3组成。因此,海马体表面的展开保持了分布在SRLM的外部背侧部分的亚区的拓扑结构,包括所有的CA1、CA2、SUB、CA3的大部分和DG的一部分。因此,通过这种展开,这些亚区上的任何点都可以在二维正交坐标系上被唯一地索引和识别。通过映射一组海马体的表面,展开到这个统一的矩形上,有助于个体之间的逐点形态对应。
可以理解,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量方法,对于获取的待处理的图像,首先可以提取其中的海马体的边界信息,进而根据该边界信息计算海马体的IMS,使得生成的IMS的最中心的纵向轴线拟合为与海马体的CA-DG边界大致一致的长轴。进而在IMS上生成从IMS指向海马体边界表面的目标辐轴,最终以IMS和目标辐条为基础生成具有层状结构和长轴的海马体结构,实现了海马体形态模型的构建。
即本发明实施例中,通过生成海马体的内接中轴面作为基础框架,进而在其上构建指向海马体表面边界的矢量场,即辐轴,使得利用基础框架及其上的矢量场构建的海马体形态模型,即轴参照模型(axis-referenced morphometric model,ARMM),其遵循海马体的纵向层状组织,且与实际结构匹配良好的长轴,能够为海马体的表面形态的各特征参数的精确测量提供准确依据,为海马体的解剖学研究及临床使用提供真实的结构特征。
另一方面,本发明实施例还提供一种基于人脑海马体纵向结构的表面形态测量装置,包括:
获取模块,用于获取待处理图像中海马体的边界信息,该边界信息表示该海马体的原始边界表面;
构建模块,用于根据该边界信息构建该海马体的内接中轴面;
映射模块,用于将第一矩形网格共形映射至该内接中轴面上,得到该内接中轴面的网格曲面,该网格曲面的中心位置的纵向坐标线表示该海马体的长轴,该网格曲面的横向坐标线表示该海马体的层状结构,该纵向坐标线与该横向坐标线垂直,该纵向坐标线与该内接中轴面及齿状回-海马角边界的交线的距离不大于预设值;
第一生成模块,用于在该网格曲面上生成目标辐轴,该目标辐轴的顶点指向该海马体的边界表面,且该目标辐轴的所有顶点对应的曲面为该海马体的目标边界表面;
第二生成模块,用于基于该目标辐轴及该内接中轴面,生成该海马体的形态模型,该形态模型中包括该海马体的目标边界表面、层状结构及长轴,该目标边界表面、层级结构及该长轴用于表征该海马体的形态特征。
可选地,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量装置,还包括:
计算模块,用于根据该目标边界表面,确定该海马体的该表面形态特征,该表面形态特征包括海马体表面参数、海马体厚度参数、海马体长度参数及海马体长轴参数。
可选地,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量装置,该构建模块具体用于:
根据该边界信息计算该海马体的维诺图;
基于该维诺图,构建该海马体的近似内接中轴面;
对该近似内接中轴面进行延伸,生成该内接中轴面。
可选地,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量装置,映射模块具体用于:
构建该第一矩形网格,该第一矩形网格内部坐标线正交;
将该第一矩形网格共形映射至该内接中轴面上,得到该内接中轴面的网格曲面;
移动该网格曲面的中心位置的纵向坐标线,使得其与该内接中轴面及齿状回-海马角边界的交线的距离不大于预设值。
可选地,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量装置,该第一生成模块具体用于:
在该网格曲面上生成初始辐轴;
基于配置的中轴几何条件,优化该初始辐轴,得到优化后的辐轴;
对优化后的辐轴的顶点进行重排,得到重排后的辐轴顶点;
连接该网格曲面上的网格顶点与对应的重排后的辐轴顶点,得到该目标辐轴。
可选地,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量装置,该上辐轴用于指示该内接中轴面至该海马体一侧,该下辐轴用于指示该内接中轴面至该海马体的另一侧,该中轴几何条件包括:
所有辐轴的顶点对应的该海马体的边界表面与该原始边界表面重合;
该辐轴与该原始边界表面垂直;
该上辐轴与对应的该下辐轴的长度相等。
可选地,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量装置,该第一生成模块具体用于:
将第二矩形网格映射至该原始边界表面,得到共形参数化后的原始边界表面,该第二矩形网格通过对该第一网格的细分得到;
提取共形参数化后的该原始边界表面的网格顶点,得到网格顶点集;
提取优化后的该辐轴的顶点,得到辐轴顶点集;
根据该辐轴顶点集及该网格顶点集中的顶点,确定该海马体的层间分界点;
根据该海马体的层间分界线,对确定的该层间分界点重排,得到层间分界点的优化顶点,该层间分界线为该海马体纵向层级之间的界线;
将各该层间分界线对应的该优化顶点共形映射至该共形参数化后的该原始边界表面,得到重排后的辐轴顶点。
可选地,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量装置,该第一生成模块具体用于:
确定该辐轴顶点集中的顶点在该网格顶点集中对应的映射顶点,得到映射顶点集;
根据所述映射顶点集确定二维映射平面,所述二维映射平面中的第一顶点及第二顶点的纵向连线为层间分界线,所述第一顶点与所述第二顶点在所述第一方向的坐标值的差不大于预设差值;
确定各该纵向连线的范围内的所有该映射顶点,作为该层间分界点。
可选地,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量装置,该第一生成模块具体用于:
将各该纵向连线预设范围内分布该层间分界点向该纵向连线移动,得到该层间分界点的优化顶点。
可选地,本发明实施例提供的基于人脑海马体纵向结构的表面形态测量装置,该第二生成模块具体用于:
连接该目标辐轴的顶点,生成该海马体的该目标边界表面;
连接所述网格曲面中横向坐标线上的目标辐轴的顶点,生成所述海马体的层级结构。
另一方面,本发明实施例提供的处理设备,该处理设备还包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,该处理器执行该程序时实现如上所述的基于人脑海马体纵向结构的表面形态测量方法。
下面参考图11,图11为本发明实施例的处理设备的结构示意图。
如图11所示,处理设备包括中央处理单元(CPU)301,其可以根据存储在只读存储器(ROM)302中的程序或者从存储部分308加载到随机访问存储器(RAM)303中的程序而执行各种适当的动作和处理。在RAM 303中,还存储有处理设备操作所需的各种程序和数据。CPU301、ROM 302以及RAM 303通过总线304彼此相连。输入/输出(I/O)接口305也连接至总线304。在一些实施例中,以下部件连接至I/O接口305:包括键盘、鼠标等的输入部分306;包括诸如阴极射线管(CRT)、液晶显示器(LCD)等以及扬声器等的输出部分307;包括硬盘等的存储部分308;以及包括诸如LAN卡、调制解调器等的网络接口卡的通信部分309。通信部分309经由诸如因特网的网络执行通信处理。驱动器310也根据需要连接至I/O接口305。可拆卸介质311,诸如磁盘、光盘、磁光盘、半导体存储器等等,根据需要安装在驱动器310上,以便于从其上读出的计算机程序根据需要被安装入存储部分308。特别地,根据本发明的实施例,上文参考流程图描述的过程可以被实现为计算机软件程序。例如,本发明的实施例包括一种计算机程序产品,其包括承载在机器可读介质上的计算机程序,该计算机程序包含用于执行流程图所示的方法的程序代码。在这样的实施例中,该计算机程序可以通过通信部分309从网络上被下载和安装,和/或从可拆卸介质311被安装。在该计算机程序被中央处理单元(CPU)301执行时,执行本发明的电子设备中限定的上述功能。
需要说明的是,本发明所示的计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质或者是上述两者的任意组合。计算机可读存储介质例如可以是——但不限于——电、磁、光、电磁、红外线、或半导体的电子设备、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体地例子可以包括但不限于:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机访问存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、光纤、便携式紧凑磁盘只读存储器(CD-ROM)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本发明中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行电子设备、装置或者器件使用或者与其结合使用。而在本发明中,计算机可读的信号介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了计算机可读的程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。计算机可读的信号介质还可以是计算机可读存储介质以外的任何计算机可读介质,该计算机可读介质可以发送、传播或者传输用于由指令执行电子设备、装置或者器件使用或者与其结合使用的程序。计算机可读介质上包含的程序代码可以用任何适当的介质传输,包括但不限于:无线、电线、光缆、RF等等,或者上述的任意合适的组合。
附图中的流程图和框图,图示了按照本发明各种实施例的电子设备、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,流程图或框图中的每张方框可以代表一个模块、程序段、或代码的一部分,前述模块、程序段、或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个接连地表示的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功能而定。也要注意的是,框图和/或流程图中的每张方框、以及框图和/或流程图中的方框的组合,可以用执行规定的功能或操作的专用的基于硬件的电子设备来实现,或者可以用专用硬件与计算机指令的组合来实现。
描述于本发明实施例中所涉及到的单元或模块可以通过软件的方式实现,也可以通过硬件的方式来实现。所描述的单元或模块也可以设置在处理器中,例如,可以描述为:一种处理器,包括:获取模块、构建模块、映射模块、第一生成模块及第二生成模块。其中,这些单元或模块的名称在某种情况下并不构成对该单元或模块本身的限定,例如,第二生成模块还可以被描述为“用于基于所述目标辐轴及所述内接中轴面,生成所述海马体的形态模型,所述形态模型中包括所述海马体的目标边界表面、层状结构及长轴,所述目标边界表面、层状结构及所述长轴用于表征所述海马体的表面形态特征”。
作为另一方面,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质可以是上述实施例中描述的电子设备中所包含的;也可以是单独存在,而未装配入该电子设备中的。上述计算机可读存储介质存储有一个或者多个计算机程序,当上述计算机程序被一个或者一个以上的处理器用来执行描述于本发明的基于人脑海马体纵向结构的表面形态测量方法:
获取待处理图像中海马体的边界信息,所述边界信息表示所述海马体的原始边界表面;
根据所述边界信息构建所述海马体的内接中轴面;
将第一矩形网格共形映射至所述内接中轴面上,得到所述内接中轴面的网格曲面,所述网格曲面的中心位置的纵向坐标线表示所述海马体的长轴,所述网格曲面的横向坐标线表示所述海马体的层状结构,所述纵向坐标线与所述横向坐标线垂直,所述纵向坐标线与所述内接中轴面及齿状回-海马角边界的交线的距离不大于预设值;
在所述网格曲面上生成目标辐轴,所述目标辐轴的顶点指向所述海马体的边界表面,且所述目标辐轴的所有顶点对应的曲面为所述海马体的目标边界表面;
基于所述目标辐轴及所述内接中轴面,生成所述海马体的形态模型,所述形态模型中包括所述海马体的目标边界表面、层状结构及长轴,所述目标边界表面、层状结构及所述长轴用于表征所述海马体的表面形态特征。
以上描述仅为本发明的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本发明中所涉及的公开范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离前述公开构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本发明中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
- 基于仿海马体记忆机制的图像处理方法及其相关设备
- 等离子体表面处理设备和等离子体设备腔体结构