一种轨道组件及轨道机器人
文献发布时间:2024-01-17 01:27:33
技术领域
本发明属于轨道机器人技术领域,具体的说是一种轨道组件及轨道机器人。
背景技术
轨道机器人是指能够在轨道上进行行走,从而实现搬运货物、检测环境质量、拍摄照片等功能的机器人,根据轨道机器人的使用功能可以分为检测机器人、运输机器人等种类,轨道机器人一般和轨道一起配合使用,轨道为轨道机器人提供行走的路线,为了实现一些功能,轨道机器人和轨道之间要有很高的配合精度。
目前的轨道和轨道机器人在复杂环境中(主要是矿井、沙漠等粉尘含量较大的环境)使用时,轨道上容易积攒颗粒杂质,如果不能及时对杂质进行清理,这些颗粒杂质会加剧轨道机器人行走机构与轨道之间的磨损,增加轨道机器人以及轨道的磨损速度,降低轨道机器人以及轨道的使用寿命,大颗粒杂质还容易卡在轨道行走机构与轨道之间,使轨道机器人卡住不动,使轨道机器人停止工作,降低轨道机器人移动的可靠性。
发明内容
为了弥补现有技术的不足,本发明提出的一种轨道组件及轨道机器人。本发明主要用于解决因目前的轨道和轨道机器人在使用时,颗粒杂质容易积攒在轨道上,会加剧轨道机器人行走机构与轨道之间的磨损,增加轨道机器人以及轨道磨损速度的问题,以及大颗粒杂质还容易卡在行走机构与轨道之间,使轨道机器人卡住不动,降低轨道机器人移动可靠性的问题。
本发明解决其技术问题所采用的技术方案是:本发明提供了一种轨道组件,包括轨道本体和移动组件;所述轨道本体的上表面上设有一号导向槽;所述一号导向槽为V型;所述一号导向槽沿所述轨道本体的长边方向设置;所述一号导向槽沿所述轨道本体的短边方向均匀间隔设置;相邻的两个所述一号导向槽相互靠近的一侧之间通过一号连接部连接;所述一号连接部为倒V型结构;所述轨道本体的两侧对称设有安装槽;所述安装槽沿所述轨道本体的长边方向设置;所述轨道本体上连接所述移动组件;所述移动组件包括支撑架、支撑轮、连接架、一号转动轴、二号转动轴、驱动轮和一号电机;所述支撑架的下方转动连接所述一号转动轴;所述一号转动轴对称设置在所述支撑架的两端;所述一号转动轴上固定连接所述支撑轮;所述支撑轮的侧面上设有二号导向槽;所述二号导向槽沿所述支撑轮的圆周方向设置;所述二号导向槽沿所述支撑轮的轴线方向均匀间隔设置;所述二号导向槽与所述一号连接部接触处的局部抵触在所述一号连接部上;所述支撑架的两侧对称设置所述连接架;所述连接架对称设置在所述轨道本体的两侧;所述连接架的上端与所述支撑架连接;所述连接架的两端对称设置所述二号转动轴;所述二号转动轴与所述连接架转动连接;所述二号转动轴上固定连接所述驱动轮;所述驱动轮的侧面抵触在所述安装槽的上侧面上;所述连接架上固定连接所述一号电机;两个所述二号转动轴与所述一号电机的转轴之间用过一号传动组件传动;两个所述二号转动轴的旋向相同;所述一号连接部和所述一号导向槽的侧面上均设有光滑涂层;所述支撑架上设有控制器;所述控制器与所述支撑架固定连接;所述一号电机与所述控制器电气连接。
优选的,所述支撑架的下方设有三号转动轴;所述三号转动轴对称设置在所述支撑架的两端;所述三号转动轴设置在两个所述支撑轮的外侧;所述三号转动轴的两侧对称设有一号连接件;所述一号连接件与所述支撑架连接;所述三号转动轴的两端分别与两端的所述一号连接件转动连接;所述三号转动轴上设有清扫件;所述清扫件套设在所述三号转动轴上;所述清扫件与所述三号转动轴固定连接;所述清扫件的外圆柱面上设有清扫结构;所述清扫结构沿所述清扫件的轴线方向均匀间隔设置;所述清扫结构的两侧抵触在相邻两个所述一号连接部相互靠近的侧边上;所述一号转动轴上固定连接有一号齿轮;所述三号转动轴上固定连接有三号齿轮;相互靠近的所述一号齿轮与所述三号齿轮之间通过齿轮组件传动;所述一号齿轮和所述三号齿轮的旋向相反。
优选的,所述连接架的两端对称设有刮除件;所述刮除件的一端与所述连接架固定连接;所述刮除件的另一端设有刷毛结构;所述刷毛结构均匀间隔设置;所述刷毛结构靠近所述驱动轮一侧设置;所述刷毛结构抵触在所述驱动轮的外圆柱面上。
优选的,所述一号导向槽内设有一号过孔;所述一号过孔沿所述轨道本体的长边方向均匀间隔设置;所述轨道本体同一截面上的所述一号过孔的下端设有二号过孔;所述二号过孔的上端与所有所述一号过孔的下端连通;所述清扫结构抵触在所述一号导向槽内。
优选的,所述支撑架与所述一号连接件连接处设有滑动槽;所述滑动槽内滑动连接所述一号连接件;所述滑动槽的一端设有一号电磁铁;所述滑动槽的另一端设有四号电磁铁;所述一号电磁铁、所述四号电磁铁均与所述支撑架固定连接;所述一号电磁铁、所述四号电磁铁的极性可调;所述一号连接件靠近所述一号电磁铁的一侧固定连接有二号电磁铁;所述一号连接件靠近所述四号电磁铁的一侧固定连接有三号电磁铁;所述一号电磁铁、所述四号电磁铁均与所述控制器电气连接;所述支撑架靠近所述一号连接件的部分为非导磁材料制成。
优选的,所述连接架与所述支撑架转动连接;所述连接架与所述支撑架之间通过连接组件连接;所述连接组件用于实现所述支撑架的转动和固定。
优选的,所述连接组件包括一号连接轴、二号连接轴、一号蜗杆和一号蜗轮;所述一号连接轴与所述支撑架转动连接;所述一号连接轴上固定连接所述连接架;所述一号连接轴的一端固定连接所述一号蜗轮;所述支撑架靠近所述一号蜗轮处转动连接所述二号连接轴;所述二号连接轴上固定连接所述一号蜗杆;所述一号蜗杆与所述一号蜗轮啮合。
优选的,所述支撑轮为一号骨架外包覆一号连接层制成;所述一号骨架与所述一号转动轴固定连接;所述一号连接层可更换;所述驱动轮为二号骨架外包覆二号连接层制成;所述二号骨架与所述二号转动轴固定连接;所述二号连接层可更换。
一种轨道机器人,所述轨道机器人与权利要求1-8中任意一项所述轨道组件连接。
本发明的有益效果如下:
1.本发明中通过控制器使两个连接架上的一号电机同步转动,进而通过一号传动组件带动两侧的二号转动轴和驱动轮转动,进而带动轨道本体两侧所有的驱动轮同步转动,进而使驱动轮沿着安装槽的上侧面进行滚动,进而使驱动轮沿着安装槽的上侧面进行移动,进而带动连接架沿轨道本体的长边进行移动,进而带动支撑架沿轨道本体的长边进行移动,进而实现移动组件的移动;移动组件移动时,支撑架带动支撑轮在轨道本体上沿着一号连接部进行滚动,进而减小二号导向槽侧壁与一号连接部之间的摩擦力,进而减缓二号导向槽侧壁以及一号连接部的磨损,进而延长支撑轮和轨道本体的使用周期,进而延长支撑轮和轨道本体的维修保养周期,进而延长轨道组件的维修保养周期,进而提高轨道组件使用的便利性;当支撑轮滚动的路线上有小颗粒杂质时,支撑轮能够越过小颗粒杂质,但是支撑轮会对小颗粒杂质产生揉搓效应,增加支撑轮以及轨道本体的磨损速度,降低支撑轮和轨道本体的使用周期,当支撑轮滚动的路线上有大颗粒杂质时,大颗粒杂质容易卡在支撑轮与轨道本体之间,支撑轮推动大颗粒杂质移动时,大颗粒杂质会对轨道本体以及支撑轮产生刮擦,增加支撑轮以及轨道本体的磨损速度,支撑轮不能推动大颗粒杂质移动时,大颗粒杂质会增加支撑轮卡住不动的几率,降低支撑轮滚动的可靠性,降低移动组件移动的可靠性,通过在轨道本体的上表面上设置一号导向槽和一号连接部,颗粒杂质掉落在一号连接部上时,颗粒杂质沿着一号连接部向一号导向槽内滑动,进而降低颗粒杂质积攒在一号连接部上的几率,而支撑轮滚动时,只有一号连接部的侧壁与二号导向槽的侧壁接触,进而降低一号连接部与二号导向槽接触处有颗粒杂质的几率,进而降低因颗粒杂质导致二号导向槽侧面以及一号连接部磨损速度增加的几率,进而降低因颗粒杂质导致支撑轮与轨道本体磨损速度增加的几率,进而降低支撑轮与轨道本体的磨损速度,进而延长支撑轮和轨道本体的使用周期,同时降低支撑轮与轨道本体的磨损速度还能够保证支撑轮与轨道本体的配合精度,进而提高驱动轮与安装槽的上侧面的配合精度,进而使驱动轮始终抵触在安装槽的上侧面上,进而提高驱动轮在安装槽上侧面上滚动的可靠性,进而提高移动组件移动的可靠性,同时降低因颗粒杂质导致支撑轮卡住不动的几率,进而提高支撑轮转动的可靠性,进而提高移动组件移动的可靠性;一号电机的转动方向能够改变,进而改变移动组件的移动方向,进而实现移动组件的往复运动,进而提高轨道组件的适用性。
2.本发明中支撑轮滚动时带动一号转动轴转动,进而带动一号齿轮转动,进而通过齿轮组件带动三号齿轮转动,进而带动三号转动轴转动,进而带动清扫件转动,进而带动清扫结构转动,进而对一号连接部上粘附的颗粒杂质进行清除,且一号齿轮和三号齿轮的旋向相反,进而使清扫件与支撑轮的旋向相反,进而通过清扫结构对颗粒杂质产生向移动方向前方的作用力,进而使颗粒杂质向远离支撑轮的方向移动,进而降低支撑轮与一号连接部接触处有颗粒杂质的几率,进而降低因颗粒杂质导致二号导向槽侧面以及一号连接部磨损速度增加的几率,进而降低支撑轮与轨道本体的磨损速度,进而延长支撑轮和轨道本体的使用周期,同时降低因颗粒杂质导致支撑轮卡住不动的几率,进而提高支撑轮转动的可靠性,进而提高移动组件移动的可靠性。
3.本发明中通过刷毛结构对驱动轮上的颗粒杂质进行刷除,进而降低驱动轮上粘附有颗粒杂质的几率,进而降低驱动轮与安装槽上侧面之间存在颗粒杂质的几率,进而降低驱动轮以及安装槽上侧面的磨损速度,进而延长驱动轮以及安装槽的使用周期,同时降低驱动轮卡住不动的几率,进而提高驱动轮转动的可靠性,进而提高移动组件移动的可靠性;降低驱动轮以及安装槽上侧面的磨损速度,还能够保证驱动轮与安装槽的上侧面的配合精度,进而使驱动轮始终抵触在安装槽的上侧面上,进而提高驱动轮在安装槽上侧面上滚动的可靠性,进而提高移动组件移动的可靠性。
4.本发明中移动组件移动时清扫件带动颗粒杂质向移动方向的前方移动,当颗粒杂质经过一号过孔时,颗粒杂质会滑落到一号过孔内,并滑落到二号过孔外,进而对一号导向槽内的颗粒杂质进行清理,进而避免人工对一号导向槽内的杂质进行清理,进而提高轨道组件的便利性。
5.本发明中通过控制器对一号电磁铁以及四号电磁铁的极性进行调整,使移动方向前侧的一号电磁铁和二号电磁铁相互吸引,使该侧的三号电磁铁和四号电磁铁相互排斥,进而使该侧的一号连接件和清扫件向斜下方移动,当二号电磁铁抵触在一号电磁铁上时,清扫结构抵触在一号连接部上,进而通过清扫结构对移动方向前方一号连接部上的颗粒杂质进行清除,同时使移动方向后侧的一号电磁铁和二号电磁铁相互排斥,使该侧的三号电磁铁和四号电磁铁相互吸引,进而使该侧的一号连接件向四号电磁铁一侧移动,进而使一号连接件和清扫件向斜上方移动,当三号电磁铁和四号电磁铁抵触在一起时,清扫结构从一号连接部上离开,进而减缓移动组件移动方向后侧清扫结构的磨损,进而延长清扫件的使用寿命。
附图说明
下面结合附图对本发明作进一步说明。
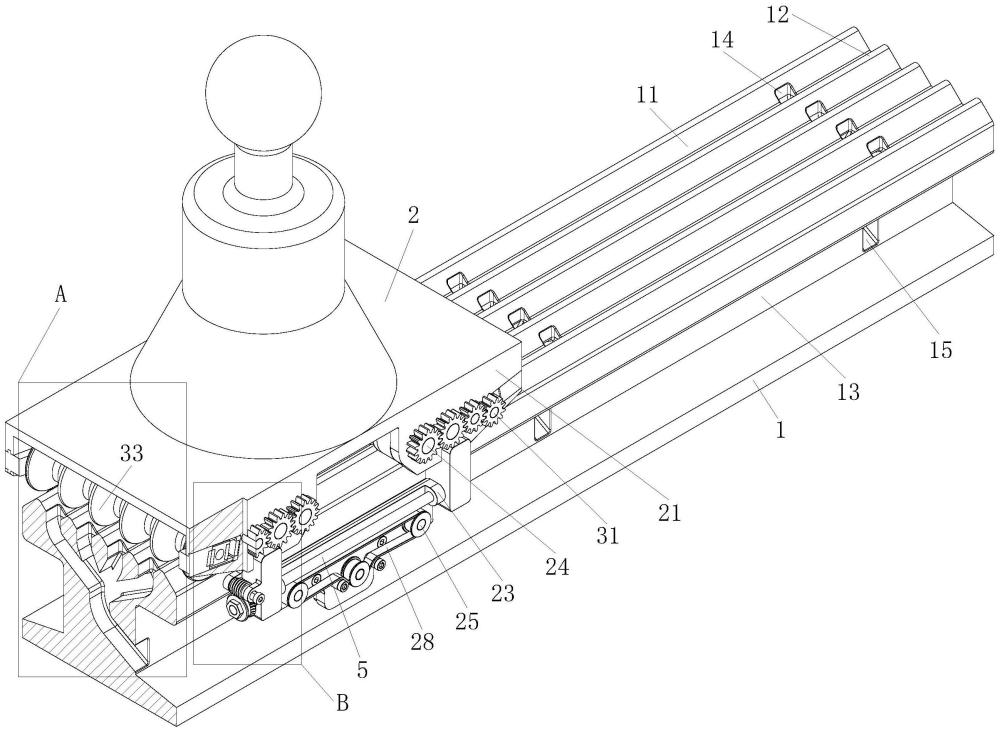
图1是本发明中轨道组件的整体结构示意图;
图2是图1中A处的局部放大图;
图3是图1中B处的局部放大图;
图4是本发明中移动组件的结构示意图;
图5是图4中C处的局部放大图;
图6是本发明中连接架的结构示意图;
图7是本发明中支撑轮的结构示意图;
图8是本发明中清扫件的结构示意图;
图9是本发明中一号连接件的结构示意图;
图10是本发明中轨道本体的结构示意图;
图11是本发明中支撑架的结构示意图;
图中:轨道本体1、一号导向槽11、一号连接部12、安装槽13、一号过孔14、二号过孔15、移动组件2、支撑架21、滑动槽211、支撑轮22、二号导向槽221、一号骨架222、一号连接层223、连接架23、一号转动轴24、二号转动轴25、驱动轮26、二号骨架261、二号连接层262、一号电机27、一号传动组件28、三号转动轴31、一号连接件32、清扫件33、清扫结构331、一号齿轮34、三号齿轮35、齿轮组件36、刮除件37、刷毛结构371、一号电磁铁41、二号电磁铁42、三号电磁铁43、四号电磁铁44、连接组件5、一号连接轴51、二号连接轴52、一号蜗杆53、一号蜗轮54。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1、图3、图4、图5、图6、图7、图10和图11所示,一种轨道组件,包括轨道本体1和移动组件2;所述轨道本体1的上表面上设有一号导向槽11;所述一号导向槽11为V型;所述一号导向槽11沿所述轨道本体1的长边方向设置;所述一号导向槽11沿所述轨道本体1的短边方向均匀间隔设置;相邻的两个所述一号导向槽11相互靠近的一侧之间通过一号连接部12连接;所述一号连接部12为倒V型结构;所述轨道本体1的两侧对称设有安装槽13;所述安装槽13沿所述轨道本体1的长边方向设置;所述轨道本体1上连接所述移动组件2;所述移动组件2包括支撑架21、支撑轮22、连接架23、一号转动轴24、二号转动轴25、驱动轮26和一号电机27;所述支撑架21的下方转动连接所述一号转动轴24;所述一号转动轴24对称设置在所述支撑架21的两端;所述一号转动轴24上固定连接所述支撑轮22;所述支撑轮22的侧面上设有二号导向槽221;所述二号导向槽221沿所述支撑轮22的圆周方向设置;所述二号导向槽221沿所述支撑轮22的轴线方向均匀间隔设置;所述二号导向槽221与所述一号连接部12接触处的局部抵触在所述一号连接部12上;所述支撑架21的两侧对称设置所述连接架23;所述连接架23对称设置在所述轨道本体1的两侧;所述连接架23的上端与所述支撑架21连接;所述连接架23的两端对称设置所述二号转动轴25;所述二号转动轴25与所述连接架23转动连接;所述二号转动轴25上固定连接所述驱动轮26;所述驱动轮26的侧面抵触在所述安装槽13的上侧面上;所述连接架23上固定连接所述一号电机27;两个所述二号转动轴25与所述一号电机27的转轴之间用过一号传动组件28传动;两个所述二号转动轴25的旋向相同;所述一号连接部12和所述一号导向槽11的侧面上均设有光滑涂层;所述支撑架21上设有控制器;所述控制器与所述支撑架21固定连接;所述一号电机27与所述控制器电气连接。
工作时,工作人员将移动组件2放置在轨道本体1上,使二号导向槽221与一号连接部12接触处的局部抵触在一号连接部12上,进而通过一号连接部12为支撑轮22提供支撑力,进而为支撑架21提供支撑力,使轨道本体1两侧的驱动轮26分别抵触在两侧安装槽13的上侧面上,进而对移动组件2的竖向位移进行限制,同时一号连接部12的侧壁对支撑轮22的二号导向槽221产生导正作用,进而对支撑轮22产生导正作用,进而使支撑轮22只能沿轨道本体1的长边方向进行移动,进而使连接架23只能沿轨道本体1的长边方向进行移动,进而完成移动组件2的安装;使用时,通过控制器使两个连接架23上的一号电机27同步转动,进而通过一号传动组件28带动两侧的二号转动轴25和驱动轮26转动,进而带动轨道本体1两侧所有的驱动轮26同步转动,进而使驱动轮26沿着安装槽13的上侧面进行滚动,进而使驱动轮26沿着安装槽13的上侧面进行移动,进而带动连接架23沿轨道本体1的长边进行移动,进而带动支撑架21沿轨道本体1的长边进行移动,进而实现移动组件2的移动;移动组件2移动时,支撑架21带动支撑轮22在轨道本体1上沿着一号连接部12进行滚动,进而减小二号导向槽221侧壁与一号连接部12之间的摩擦力,进而减缓二号导向槽221侧壁以及一号连接部12的磨损,进而延长支撑轮22和轨道本体1的使用周期,进而延长支撑轮22和轨道本体1的维修保养周期,进而延长轨道组件的维修保养周期,进而提高轨道组件使用的便利性;当支撑轮22滚动的路线上有小颗粒杂质时,支撑轮22能够越过小颗粒杂质,但是支撑轮22会对小颗粒杂质产生揉搓效应,增加支撑轮22以及轨道本体1的磨损速度,降低支撑轮22和轨道本体1的使用周期,当支撑轮22滚动的路线上有大颗粒杂质时,大颗粒杂质容易卡在支撑轮22与轨道本体1之间,支撑轮22推动大颗粒杂质移动时,大颗粒杂质会对轨道本体1以及支撑轮22产生刮擦,增加支撑轮22以及轨道本体1的磨损速度,支撑轮22不能推动大颗粒杂质移动时,大颗粒杂质会增加支撑轮22卡住不动的几率,降低支撑轮22滚动的可靠性,降低移动组件2移动的可靠性,通过在轨道本体1的上表面上设置一号导向槽11和一号连接部12,颗粒杂质掉落在一号连接部12上时,颗粒杂质沿着一号连接部12向一号导向槽11内滑动,进而降低颗粒杂质积攒在一号连接部12上的几率,而支撑轮22滚动时,只有一号连接部12的侧壁与二号导向槽221的侧壁接触,进而降低一号连接部12与二号导向槽221接触处有颗粒杂质的几率,进而降低因颗粒杂质导致二号导向槽221侧面以及一号连接部12磨损速度增加的几率,进而降低因颗粒杂质导致支撑轮22与轨道本体1磨损速度增加的几率,进而降低支撑轮22与轨道本体1的磨损速度,进而延长支撑轮22和轨道本体1的使用周期,同时降低支撑轮22与轨道本体1的磨损速度还能够保证支撑轮22与轨道本体1的配合精度,进而提高驱动轮26与安装槽13的上侧面的配合精度,进而使驱动轮26始终抵触在安装槽13的上侧面上,进而提高驱动轮26在安装槽13上侧面上滚动的可靠性,进而提高移动组件2移动的可靠性,同时降低因颗粒杂质导致支撑轮22卡住不动的几率,进而提高支撑轮22转动的可靠性,进而提高移动组件2移动的可靠性;一号电机27的转动方向能够改变,进而改变移动组件2的移动方向,进而实现移动组件2的往复运动,进而提高轨道组件的适用性。
如图1、图2、图3、图4、图8、图9和图11所示,所述支撑架21的下方设有三号转动轴31;所述三号转动轴31对称设置在所述支撑架21的两端;所述三号转动轴31设置在两个所述支撑轮22的外侧;所述三号转动轴31的两侧对称设有一号连接件32;所述一号连接件32与所述支撑架21连接;所述三号转动轴31的两端分别与两端的所述一号连接件32转动连接;所述三号转动轴31上设有清扫件33;所述清扫件33套设在所述三号转动轴31上;所述清扫件33与所述三号转动轴31固定连接;所述清扫件33的外圆柱面上设有清扫结构331;所述清扫结构331沿所述清扫件33的轴线方向均匀间隔设置;所述清扫结构331的两侧抵触在相邻两个所述一号连接部12相互靠近的侧边上;所述一号转动轴24上固定连接有一号齿轮34;所述三号转动轴31上固定连接有三号齿轮35;相互靠近的所述一号齿轮34与所述三号齿轮35之间通过齿轮组件36传动;所述一号齿轮34和所述三号齿轮35的旋向相反。
支撑轮22滚动时带动一号转动轴24转动,进而带动一号齿轮34转动,进而通过齿轮组件36带动三号齿轮35转动,进而带动三号转动轴31转动,进而带动清扫件33转动,进而带动清扫结构331(清扫结构331可以是海绵材料制成,也可以是毛状材料等其他材料制成)转动,进而对一号连接部12上粘附的颗粒杂质进行清除,且一号齿轮34和三号齿轮35的旋向相反,进而使清扫件33与支撑轮22的旋向相反,进而通过清扫结构331对颗粒杂质产生向移动方向前方的作用力,进而使颗粒杂质向远离支撑轮22的方向移动,进而降低支撑轮22与一号连接部12接触处有颗粒杂质的几率,进而降低因颗粒杂质导致二号导向槽221侧面以及一号连接部12磨损速度增加的几率,进而降低支撑轮22与轨道本体1的磨损速度,进而延长支撑轮22和轨道本体1的使用周期,提高移动组件2移动的可靠性,同时降低因颗粒杂质导致支撑轮22卡住不动的几率,进而提高支撑轮22转动的可靠性,进而提高移动组件2移动的可靠性;同时降低支撑轮22与轨道本体1的磨损速度还能够保证支撑轮22与轨道本体1的配合精度,进而提高驱动轮26与安装槽13的上侧面的配合精度,进而使驱动轮26始终抵触在安装槽13的上侧面上,进而提高驱动轮26在安装槽13上侧面上滚动的可靠性,进而提高移动组件2移动的可靠性。
如图6所示,所述连接架23的两端对称设有刮除件37;所述刮除件37的一端与所述连接架23固定连接;所述刮除件37的另一端设有刷毛结构371;所述刷毛结构371均匀间隔设置;所述刷毛结构371靠近所述驱动轮26一侧设置;所述刷毛结构371抵触在所述驱动轮26的外圆柱面上。
当驱动轮26与安装槽13上侧面之间有颗粒杂质时,颗粒杂质会增加驱动轮26以及安装槽13上侧面的磨损速度(同支撑轮22与轨道本体1之间存在颗粒杂质类似,在此不再阐述),降低驱动轮26以及安装槽13的使用周期,同时增加驱动轮26卡住不动的几率(同支撑轮22与轨道本体1之间存在颗粒杂质类似,在此不再阐述),降低驱动轮26转动的可靠性,通过刷毛结构371对驱动轮26上的颗粒杂质进行刷除,进而降低驱动轮26上粘附有颗粒杂质的几率,进而降低驱动轮26与安装槽13上侧面之间存在颗粒杂质的几率,进而降低驱动轮26以及安装槽13上侧面的磨损速度,进而延长驱动轮26以及安装槽13的使用周期,同时降低驱动轮26卡住不动的几率,进而提高驱动轮26转动的可靠性,进而提高移动组件2移动的可靠性;降低驱动轮26以及安装槽13上侧面的磨损速度,还能够保证驱动轮26与安装槽13的上侧面的配合精度,进而使驱动轮26始终抵触在安装槽13的上侧面上,进而提高驱动轮26在安装槽13上侧面上滚动的可靠性,进而提高移动组件2移动的可靠性。
如图1、图2和图10所示,所述一号导向槽11内设有一号过孔14;所述一号过孔14沿所述轨道本体1的长边方向均匀间隔设置;所述轨道本体1同一截面上的所述一号过孔14的下端设有二号过孔15;所述二号过孔15的上端与所有所述一号过孔14的下端连通;所述清扫结构331抵触在所述一号导向槽11内。
随着使用时间的增加,一号导向槽11内积攒的杂质会越来越多,如果不能及时清理就会使多余的杂质积攒在一号连接部12上,通过设置一号过孔14以及二号过孔15,移动组件2移动时清扫件33带动颗粒杂质向移动方向的前方移动,当颗粒杂质经过一号过孔14时,颗粒杂质会滑落到一号过孔14内,并滑落到二号过孔15外,进而对一号导向槽11内的颗粒杂质进行清理,进而避免人工对一号导向槽11内的杂质进行清理,进而提高轨道组件的便利性。
如图1、图3、图9和图11所示,所述支撑架21与所述一号连接件32连接处设有滑动槽211;所述滑动槽211内滑动连接所述一号连接件32;所述滑动槽211的一端设有一号电磁铁41;所述滑动槽211的另一端设有四号电磁铁44;所述一号电磁铁41、所述四号电磁铁44均与所述支撑架21固定连接;所述一号电磁铁41、所述四号电磁铁44的极性可调;所述一号连接件32靠近所述一号电磁铁41的一侧固定连接有二号电磁铁42;所述一号连接件32靠近所述四号电磁铁44的一侧固定连接有三号电磁铁43;所述一号电磁铁41、所述四号电磁铁44均与所述控制器电气连接;所述支撑架21靠近所述一号连接件32的部分为非导磁材料制成。
移动组件2移动前,通过控制器对一号电磁铁41以及四号电磁铁44的极性进行调整,使移动方向前侧的一号电磁铁41和二号电磁铁42相互靠近的一端具有相反的极性,使该侧的三号电磁铁43和四号电磁铁44相互靠近的一端具有相同的极性,进而使该侧的一号电磁铁41和二号电磁铁42相互吸引,使该侧的三号电磁铁43和四号电磁铁44相互排斥,进而使该侧的一号连接件32向一号电磁铁41一侧移动,进而使一号连接件32向斜下方移动,进而使清扫件33向斜下方移动,当二号电磁铁42抵触在一号电磁铁41上时,清扫结构331抵触在一号连接部12上,进而通过清扫结构331对移动方向前方一号连接部12上的颗粒杂质进行清除,同时使移动方向后侧的一号电磁铁41和二号电磁铁42相互靠近的一端具有相同的极性,使该侧的三号电磁铁43和四号电磁铁44相互靠近的一端具有相反的极性,进而使该侧的一号电磁铁41和二号电磁铁42相互排斥,使该侧的三号电磁铁43和四号电磁铁44相互吸引,进而使该侧的一号连接件32向四号电磁铁44一侧移动,进而使一号连接件32向斜上方移动,进而使清扫件33向斜上方移动,当三号电磁铁43和四号电磁铁44抵触在一起时,清扫结构331从一号连接部12上离开,进而减缓移动组件2移动方向后侧清扫结构331的磨损,进而延长清扫件33的使用寿命。
如图1所示,所述连接架23与所述支撑架21转动连接;所述连接架23与所述支撑架21之间通过连接组件5连接;所述连接组件5用于实现所述支撑架21的转动和固定。
当移动组件2需要维修保养时,通过连接组件5带动连接架23转动,进而使连接架23转动到轨道本体1的两侧,此时驱动轮26移动到轨道本体1的两侧,进而方便向上提走移动组件2,进而方便对移动组件2进行维修保养,进而提高轨道组件的便利性。
如图1、图3、图4和图6所示,所述连接组件5包括一号连接轴51、二号连接轴52、一号蜗杆53和一号蜗轮54;所述一号连接轴51与所述支撑架21转动连接;所述一号连接轴51上固定连接所述连接架23;所述一号连接轴51的一端固定连接所述一号蜗轮54;所述支撑架21靠近所述一号蜗轮54处转动连接所述二号连接轴52;所述二号连接轴52上固定连接所述一号蜗杆53;所述一号蜗杆53与所述一号蜗轮54啮合。
当移动组件2需要维修保养时,转动二号连接轴52,进而带动一号蜗杆53转动,进而带动一号蜗轮54转动,进而带动一号连接轴51转动,进而带动连接架23转动,进而使连接架23以及驱动轮26转动到轨道本体1的两侧,进而方便向上提走移动组件2,进而方便对移动组件2进行维修保养,进而提高轨道组件的便利性;移动组件2维修保养班完毕后,将移动组件2放置在轨道本体1上,使二号导向槽221与一号连接部12接触处的局部抵触在一号连接部12上,随后反向转动二号连接轴52,进而带动一号连接轴51反向转动,进而带动连接架23和驱动轮26向安装槽13的上侧面移动,进而使驱动轮26抵触在安装槽13的上侧面上,由于一号蜗轮54和一号蜗杆53具有自锁作用,进而在二号连接轴52不受转动力的情况下使一号蜗轮54和一号蜗杆53保持不动,进而使驱动轮26始终抵触在安装槽13的上侧面上,进而完成移动组件2的安装。
如图3、图4和图7所示,所述支撑轮22为一号骨架222外包覆一号连接层223制成;所述一号骨架222与所述一号转动轴24固定连接;所述一号连接层223可更换;所述驱动轮26为二号骨架261外包覆二号连接层262制成;所述二号骨架261与所述二号转动轴25固定连接;所述二号连接层262可更换。
当支撑轮22与轨道本体1之间有小颗粒杂质时,小颗粒杂质使一号连接层223产生变形,进而降低小颗粒在支撑轮22与一号连接部12之间产生揉搓的几率,进而降低二号导向槽221以及一号连接部12的磨损速度,进而延长支撑轮22以及轨道本体1的使用周期;当驱动轮26与安装槽13上侧面之间有小颗粒杂质时,小颗粒杂质时二号连接层262产生变形,进而降低小颗粒杂质在驱动轮26与安装槽13上侧面之间产生揉搓的几率,进而降低驱动轮26以及安装槽13上侧面的磨损速度,进而延长驱动轮26以及安装槽13上侧面的使用周期,进而延长驱动轮26以及轨道本体1的使用周期,同时提高驱动轮26在安装槽13上侧面上滚动的可靠性,进而提高移动组件2移动的可靠性。
如图1至图11所示,一种轨道机器人,所述轨道机器人与权利要求1-8中任意一项所述轨道组件连接。
工作时,工作人员将移动组件2放置在轨道本体1上,使二号导向槽221与一号连接部12接触处的局部抵触在一号连接部12上,进而通过一号连接部12为支撑轮22提供支撑力,进而为支撑架21提供支撑力,使轨道本体1两侧的驱动轮26分别抵触在两侧安装槽13的上侧面上,进而对移动组件2的竖向位移进行限制,同时一号连接部12的侧壁对支撑轮22的二号导向槽221产生导正作用,进而对支撑轮22产生导正作用,进而使支撑轮22只能沿轨道本体1的长边方向进行移动,进而使连接架23只能沿轨道本体1的长边方向进行移动,进而完成移动组件2的安装;使用时,通过控制器使两个连接架23上的一号电机27同步转动,进而通过一号传动组件28带动两侧的二号转动轴25和驱动轮26转动,进而带动轨道本体1两侧所有的驱动轮26同步转动,进而使驱动轮26沿着安装槽13的上侧面进行滚动,进而使驱动轮26沿着安装槽13的上侧面进行移动,进而带动连接架23沿轨道本体1的长边进行移动,进而带动支撑架21沿轨道本体1的长边进行移动,进而实现移动组件2的移动;移动组件2移动时,支撑架21带动支撑轮22在轨道本体1上沿着一号连接部12进行滚动,进而减小二号导向槽221侧壁与一号连接部12之间的摩擦力,进而减缓二号导向槽221侧壁以及一号连接部12的磨损,进而延长支撑轮22和轨道本体1的使用周期,进而延长支撑轮22和轨道本体1的维修保养周期,进而延长轨道组件的维修保养周期,进而提高轨道组件使用的便利性;当支撑轮22滚动的路线上有小颗粒杂质时,支撑轮22能够越过小颗粒杂质,但是支撑轮22会对小颗粒杂质产生揉搓效应,增加支撑轮22以及轨道本体1的磨损速度,降低支撑轮22和轨道本体1的使用周期,当支撑轮22滚动的路线上有大颗粒杂质时,大颗粒杂质容易卡在支撑轮22与轨道本体1之间,支撑轮22推动大颗粒杂质移动时,大颗粒杂质会对轨道本体1以及支撑轮22产生刮擦,增加支撑轮22以及轨道本体1的磨损速度,支撑轮22不能推动大颗粒杂质移动时,大颗粒杂质会增加支撑轮22卡住不动的几率,降低支撑轮22滚动的可靠性,降低移动组件2移动的可靠性,通过在轨道本体1的上表面上设置一号导向槽11和一号连接部12,颗粒杂质掉落在一号连接部12上时,颗粒杂质沿着一号连接部12向一号导向槽11内滑动,进而降低颗粒杂质积攒在一号连接部12上的几率,而支撑轮22滚动时,只有一号连接部12的侧壁与二号导向槽221的侧壁接触,进而降低一号连接部12与二号导向槽221接触处有颗粒杂质的几率,进而降低因颗粒杂质导致二号导向槽221侧面以及一号连接部12磨损速度增加的几率,进而降低因颗粒杂质导致支撑轮22与轨道本体1磨损速度增加的几率,进而降低支撑轮22与轨道本体1的磨损速度,进而延长支撑轮22和轨道本体1的使用周期,同时降低支撑轮22与轨道本体1的磨损速度还能够保证支撑轮22与轨道本体1的配合精度,进而提高驱动轮26与安装槽13的上侧面的配合精度,进而使驱动轮26始终抵触在安装槽13的上侧面上,进而提高驱动轮26在安装槽13上侧面上滚动的可靠性,进而提高移动组件2移动的可靠性,同时降低因颗粒杂质导致支撑轮22卡住不动的几率,进而提高支撑轮22转动的可靠性,进而提高移动组件2移动的可靠性;一号电机27的转动方向能够改变,进而改变移动组件2的移动方向,进而实现移动组件2的往复运动,进而提高轨道组件的适用性。
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
- 一种用于变化轨道的轨道机器人行走机构
- 一种用于变轨装置的轨道支架组件
- 一种轨道交通车辆及其模块化多用途设备安装组件
- 一种轨道灯用调焦组件
- 一种基于轨道组件的混凝土路面震荡机器人及其轨道组件
- 轨道机器人转向组件和轨道机器人