微流控细胞培养装置
文献发布时间:2024-01-17 01:28:27
本申请要求于2020年10月7日提交的美国临时申请第63/088,900号的权益和优先权,所述美国临时申请特此通过引用以其整体并入本文。
技术领域
本发明总体上处于用于微流控细胞培养装置的制造过程和组件的领域。
背景技术
微流控是指几何上限制到小尺度(通常亚毫米)的流体的行为、精确控制和操控。其属于涉及工程学、物理学、化学、生物化学、纳米技术和生物技术的多学科领域。微流控实际应用于处理低体积的流体以实现多路复用、自动化和高通量筛选的系统的设计中。
微流控细胞培养集成了来自生物学、生物化学、工程学和物理学的知识,以开发用于在微尺度上用细胞培养物进行培养、维护、分析和实验的装置和技术。其合并了微流控、用于操控人工制造的微系统中的小流体体积(μL、nL、pL)的技术集和细胞培养,所述细胞培养涉及细胞在控制的实验室环境中的生长和增殖。微流控已用于细胞生物学研究,因为微流控通道的尺寸非常适于细胞的物理尺度(微米数量级)。例如,真核细胞的线性尺寸介于10-100μm之间,这落入微流控尺寸的范围内。微流控细胞培养的关键组成部分是能够模拟细胞微环境,所述关键组成部分包含调节细胞结构、功能、行为和生长的可溶性因子。装置的另一个重要的组成部分是能够产生存在于体内的稳定生物分子梯度,因为这些梯度在了解对细胞的趋化、趋硬和趋触效应方面发挥着重要作用。传统的二维(2D)细胞培养是在平坦表面,例如孔板的底部上进行的细胞培养并且被称为常规方法。虽然这些平台可用于要用于随后的实验的生长细胞和增殖细胞,但其不是用于监测对刺激的细胞应答的理想环境,因为细胞不能自由地移动或执行在体内观察到的依赖于细胞-细胞外基质材料相互作用的功能。为了解决这个问题,已经开发了许多方法来创建三维(3D)天然细胞环境。由于通过软光刻的聚(二甲基硅氧烷)(PDMS)微流控装置制造的到来,微流控装置已经取得进展,并且已被证明对模拟细胞培养的自然3D环境非常有益。
细胞生物学、微制造和微流控的最新进展已经实现了对人器官的功能单元的微工程化模型,即被称为片上器官(organ-on-a-chip,OOC)的开发,所述微工程化模型可以以较强的预测能力提供临床前测定的基础。早期的实施例已被描述和商业化。例如,Griffith等人的美国专利第6,197,575号描述了适用于复杂分层组织或器官结构的接种、附接和培养的微基质和灌注组合件。Inman等人的美国专利第8,318,479号描述了一种促进以适合于以多孔板格式培养和测定的毛细管床的长度尺度进行的灌注的系统。美国申请公开第US2016/0377599号和第US 2017/0227525 A1号描述了具有集成泵送、调平和感测的器官微生理系统。
被称为微生理系统(MPS)的这些平台被设计成通过将组织工程化原理与微制造或微机加工技术整合来模拟生理功能以便概括3D多细胞相互作用和对营养物转运和/或机械刺激的动态调节(Huh D等人,《芯片实验室(Lab Chip)》,12(12):2156-2164(2012);SungJH等人《芯片实验室》13(7):1201-1212(2013);Wikswo JP等人,《实验生物学和医学(梅伍德)(Exp Biol Med(Maywood))》239(9):1061-1072(2014);Livingston CA等人,《计算和结构生物技术杂志(Computational and Structural Biotechnology Journal)》14:207-210(2016);Yu J等人,《今日药物发现(Drug Discovery Today)》,19(10):1587-1594(2014);Zhu L等人《芯片实验室》16(20):3898-3908(2016))。虽然在单独MPS(例如,心脏、肺部、肝脏、脑)的开发方面已取得显著进展(Roth A等人,《先进药物输送评论(Adv Drug DeliverRev)》,69-70:179-189(2014);Huebsch N等人《科学报告(Scientific Reports)》,6:24726(2016);Domansky K等人《芯片实验室》10(l):51-58(2010)),但是针对MPS的互连所做出的努力仍处于初级阶段,其中大部分研究主要集中于基本活力和毒性展示(Oleaga C等人《科学报告》6:20030(2016);Esch MB等人,《芯片实验室》14(16):3081-3092(2014);Maschmeyer I等人,《芯片实验室》15(12):2688-2699(2015);Mateme EM等人《生物技术杂志(J Biotechnol)》205:36-46(2015);Loskill P等人,《公共科学图书馆综合(Plos One)》10(10):e0139587(2015))。然而,缺少临床疗效而不是毒性被鉴定为是II期和III期临床试验(成本最高的阶段)中药物损耗的主要原因(Kubinyi H《自然综述:药物发现(Nat RevDrug Discov)》,2(8):665-668(2003);Cook D等人《自然综述:药物发现》13(6):419-431(2014);Denayer T等人,《转化医学新视野(New Horizons in TranslationalMedicine)》,2(1):5-11(2014))。主要促成因素包含不完全理解疾病机制、缺少预测性生物标志物以及种间差异。由于需要用于靶识别/验证和生物标志物发现的人源化模型系统,所以对在药物的迫切的需要未得到满足。
虽然毒理学和药效学研究是常见应用,但是药代动力学研究在多MPS平台方面一直受到限制。此外,当前多MPS系统可以采用与用于在非常小的流体体积的情况下进行操作的传统微流控芯片相关联的闭合格式(Anna SL,《流体力学综述年刊(Annu.Rev.FluidMech.)》48,285-309(2016))。这些系统的当前制造过程需要使用可浇注弹性体聚合物(Halldorsson S等人,《生物传感与生物电子(Biosens.Bioelectron.)》63,218—231(2015))。
国际专利申请第PCT/US2019/030216号“用于片上器官平台的泵和硬件(Pumpsand Hardware For Organ-On-Chip Platforms)”麻省理工学院(MassachusettsInstitute of Technology)描述了对流体处理的许多不同改进,包含泵、阀和用于控制和致动这些系统的装置。
用于制造这些装置的材料和新制造方法
与细胞培养相关的微流控装置的一些考虑事项包含:制造材料(例如,聚二甲基硅氧烷(PDMS)、聚苯乙烯)、散装材料特性(例如,光学澄清度、表面特性)、制造方法(例如,注射模制、热压印)、培养区域几何形状、递送和去除培养基的方法以及使用被动方法(例如,重力驱动的流、毛细管泵、基于拉普拉斯压力(Laplace pressure)的“被动泵送”)或流量控制的装置(即,灌注系统)的流配置。微流控装置的灵活性通过对空间模式的经改进的控制极大地促进多元培养研究的发展。由PDMS制成的闭合式通道系统是最常用的,因为PDMS已在传统上实现了生物相容性微装置的快速原型化。例如,可以在基于液滴的微流控中通过共包封系统容易地达到经混合的共培养物,以研究旁分泌和近分泌信号传导。通过合并载有细胞的琼脂糖溶液的两个流将两种类型的细胞包封在液滴中。胶凝后,琼脂糖微凝胶用作用于细胞共培养物的3D微环境。使用微流控通道中的分离的共培养物以研究旁分泌信号传导。人肺泡上皮细胞和微血管内皮细胞可以在隔室化的PDMS通道中共培养,所述通道被薄的多孔的且可拉伸的PDMS膜分开以模拟肺泡-毛细血管屏障。
制造材料在细胞培养装置的设计中至关重要,因为并非所有聚合物都是生物相容性的,其中一些材料,如PDMS,引起小分子的不期望的吸附或吸收。
此外,未固化的PDMS寡聚物可能浸出到细胞培养基中,这可能会损害微环境。作为PDMS的替代物,热塑性塑料(例如,聚苯乙烯、聚砜、PMMA、COC)作为替代材料的用途已经取得进展。这些材料提供了良好的光学澄清度和小特征再现,不会折衷与小生物分子的相互作用。使用这些材料制造装置的能力构成了一些独特的挑战,这些挑战抑制了其在微流控界的普遍性。
制造方法在成功地制造微流控装置方面也是至关重要的。PDMS装置通常是模制的并且与玻璃显微镜载玻片等离子体键合,这对于热塑性聚合物来说是不可行的过程。光学上澄清的热塑性微流控装置的层压通常需要昂贵的设备(例如,超声焊接、激光焊接),并且所述层压倾向于具有低强度并且在装置与光学窗口之间具有不期望的键合。
对芯片上的流体压力和流速的控制对于模拟体内流控条件至关重要。这可以使用基于重力的流、片上泵或如注射器泵等外部泵进行。所有现有的泵送平台都允许对流体压力或流体流速进行控制。期望的是对微尺度装置中的流体压力和细胞的空间组织进行控制在很大程度上取决于细胞在体内执行功能的培养区域几何形状。例如,可能期望长的窄通道来培养神经元。灌注系统也可能影响所选择那种几何形状。例如,在并入注射器泵的系统中,将需要添加用于灌注入口、灌注出口、废物和细胞上样的通道以供细胞培养物维持。微流控细胞培养中的灌注对实现芯片上的长培养时间段和实现细胞分化非常重要。
因此,本发明的目的是提供用于制造具有经改进的光学澄清度、生物相容性和作为聚二甲基硅氧烷(PDMS)的易于制造的替代物的集成柔性膜的热塑性微流控装置的新材料和方法。
本发明的另一个目的是提供对使用薄弹性体膜的微流控装置中的流体处理的改进。
本发明的另外的目的是提供用于微流控装置的气动致动泵使用的经改进的泵室和膈膜,所述泵室和膈膜诱导较低应变并且更准确。
本发明的另一个目的是提供增强流体密封压力的经优化的低体积阀几何形状。
本发明的仍另一个目的是提供用于在压力下储存流体体积的液压蓄积器,以及用于控制微流控通道中的系统压力的背压调节器。
本发明的仍另外的目的是提供在微流控装置中制造和使用含水凝胶的基质的经改进的方法,所述方法包含形成水凝胶并且用可移除结构以及利用各种类型的水凝胶支架来遏制水凝胶材料的方式。
本发明的另一个目的是提供可以同时控制多个微流控装置的细胞培养平台,所述细胞培养平台用于高通量研究。
本发明的另外的目的是提供具有高级控制特征和互连的一次性微流控芯片。
发明内容
制造微流控装置的材料和方法
已经开发了一种用于将由环烯烃共聚物制成的微流控装置与集成弹性体膜键合的方法,所述方法在不使用如聚二甲基硅氧烷(“PDMS”)等材料的情况下实现了各种范围的微流控组件,包含泵、阀、蓄积器、压力调节器、氧合器和压力传感器。这些装置可以与电气动控制单元集成,以供高级过程控制下的高通量使用。所述过程将用于细胞培养应用的光学上澄清的耐溶剂的且生物相容的聚合物键合。这些装置的键合强度和光学特性远远超过其它材料,如PDMA的粘合强度和光学特性。这些材料和方法可用于在整个系统中在受控的流速和过程的情况下通过泵、阀、压力调节器、蓄积器和片上感测元件制造微流控系统。
已经开发了制造供微流控装置使用的薄的薄膜的方法。在一个实施例中,已经开发了一种用于蚀刻弹性体聚合物薄膜的水辅助的激光机加工技术,所述技术使用水薄膜的毛细管作用以将切割的片固定在位。此方法还提供了用于控制激光机加工过程中的过量热的热沉层和IR吸收层。在另一种方法中,具有负向特征的多孔真空卡盘充当用于经热成形的弹性体膜的模具。
已经开发了一种用于容易地制造具有光学窗口的热塑性微流控芯片的自定义光学薄膜。所述薄膜由与弹性体COC的薄层键合在一起的高温度等级的COC上的可移除聚乙烯载体薄膜组成。弹性体COC受到由聚合物,如双轴定向的聚对苯二甲酸乙二醇酯
已经开发了一种用于将薄弹性体薄膜层压到微流控芯片上的自定义键合工艺。将薄膜放置在非相互作用载体薄膜,如用于薄膜粘合剂并且由平坦基板支撑的那些薄膜上。刚性组件与膜对齐并且穿过热层压机。载体薄膜和支撑结构的使用实现了与芯片的高强度键合,不会引起膜的热翘曲。
新的片上组件,其特征在于,弹性体膜工艺,或者可以使用热压机或热板键合。这种薄膜可以在辊挤出过程中大量产生,并且可以使用常规激光制造技术切割成合适大小。
已经开发了一种用于将薄弹性体薄膜层压到微流控芯片上的自定义键合工艺。将薄膜放置在非相互作用载体薄膜,如用于薄膜粘合剂并且由平坦基板支撑的那些薄膜上。刚性组件与膜对齐并且穿过热层压机。载体薄膜和支撑结构的使用实现了与芯片的高强度键合,不会引起膜的热翘曲。
具有弹性体膜的片上组件
已经开发了一种具有应力消除特征的弹性体膈膜,所述弹性膈膜用于微流控阀和泵膈膜。这种滚动膈膜滚动以经历高移位和有限的弹性变形。这些膈膜包含外部滚动膈膜、内部滚动膈膜、形状变化膈膜和侧向滚动膈膜。已经开发了具有经优化的泵室的膈膜微型泵,所述经优化的泵室确保可靠的移位和提高的可靠性。一个泵室的特征在于,滚动膈膜,并且一个泵室的特征在于,具有可预测的移位冲程的泵室。滚动膈膜泵室使用滚动膈膜来使室中的流体体积移位。膈膜可以使用压缩气体和真空来致动。另一种泵室设计是保证从泵室中的完全流体移位的经优化的形状。室几何形状被设计成围绕柔性膜在加压负载下的弹性响应,使得膜在泵冲程期间保持与泵室的接触环。这一特征消除了小袋流体被捕集在膈膜中的机会,并且确保可靠的移位体积。
在一优选实施例中,已经开发了一种具有应力消除特征的弹性体膈膜,所述弹性膈膜用于微流控阀和泵膈膜。这种滚动膈膜滚动以经历高移位和有限的弹性变形。这些膈膜包含外部滚动膈膜、内部滚动膈膜、形状变化膈膜和侧向滚动膈膜。已经开发了具有经优化的泵室的膈膜微型泵,所述经优化的泵室确保可靠的移位和提高的可靠性。一个泵室的特征在于,滚动膈膜,并且一个泵室的特征在于,具有可预测的移位冲程的泵室。滚动膈膜泵室使用滚动膈膜来使室中的流体体积移位。膈膜可以使用压缩气体和真空来致动。另一种泵室设计是保证从泵室中的完全流体移位的经优化的形状。室几何形状被设计成围绕柔性膜在加压负载下的弹性响应,使得膜在泵冲程期间保持与泵室的接触环。这一特征消除了小袋流体被捕集在膈膜中的机会,并且由此确保可靠的移位体积。
已经开发了使用气动致动的弹性膜作为密封特征并且使用压缩气体作为偏置元件的微流控压力调节器。在一优选实施例中,流体使压力抵靠弹性膜堆积,直至所述压力战胜了由另一侧的压缩气体施加的压力并且充当背压调节器。在替代性实施例中,调节器控制调节元件下游的流体压力。膈膜被设计成具有低刚度,使得其对膜中的应变能不敏感。一旦流体压力超过密封压力,流体就开始流动。可以通过调节压缩气体源来调节流体压力,并且可以通过增加流控回路中的顺应性来使流稳定。
可以使用几种不同类型的微流控蓄积器以将加压的流体储存在微流控芯片中。在一个实施例中,蓄积器使用柔性膜以使用膜中的所储存的弹性能来储存压力。在另一实施例中,微流控蓄积器使用小死端微流控通道以在压力下捕集气泡并储存体积。在第三实施例中,微流控蓄积器使用在一侧用空气加压的滚动膈膜和储存在储器中的流体。
已经开发了几种片上压力传感器。在一个实施例中,传感器使用光学电平或电容变化和可变形膜,其中弹性膜的变形随着压力的增加而发生。在另一实施例中,使用相机以测量微流控通道中所捕集的气泡的长度,所述长度与通道压力成比例。
用于水凝胶安装和组织支架的方法
描述了各种水凝胶的形成技术。在一个实施例中,使用可移除或可溶解支撑结构以在水凝胶形成时将水凝胶定位和/或以在水凝胶中产生通道以供流体流动。在替代性实施例中,使用可折叠襟翼来对水凝胶整形,然后折叠起来。在仍另一实施例中,通道是通过在容器中产生与其所插入到的歧管上的特征相匹配的楔或通道产生的。在又另一实施例中,使用通过表面张力被保持在位的槽形状的悬滴水凝胶以分离培养基通道并随着膨胀改变流构型。使用包含聚四氟乙烯(“PTFE”)的非粘附聚合物允许在聚合后在不破坏水凝胶的情况下移除这些结构。
各种细胞外基质(“ECM”)材料的支架可以被激光切割以供微流控芯片和跨孔插入物使用。激光切割的孔的大小和形状可以从几微米至毫米不等。使用光学上澄清的薄膜使这些支架为可成像的,并且疏水性质允许将ECM掺入到液相中。
用于高通量细胞培养研究的平台
可移除帽已被设计成用于细胞培养应用的微流控装置。这些帽可以包含光学上澄清的窗口、用于更好顺应性的弹性体特征或薄膜上的用于经改进的密封性的粘合剂图案。微流控芯片的储器也可以被设计成适应双位置细胞培养帽和其它现有帽设计。在另一实施例中,已经开发了一种用于微流控芯片的快速释放顶部,所述快速释放顶部使用垫圈,所述垫圈是使用弹簧加载的杠杆、肘节夹具或过中心闩锁压缩的。
已经开发了用于堆叠微流控装置的电气动歧管,所述电气动歧管竖直地或在旋转机构上并入装置。这些歧管将气动信号分配到多个芯片以用于高通量实验。单独歧管的特征还在于,一种用于实现微流控装置与气动管线的快速连接的闩锁系统。
附图说明
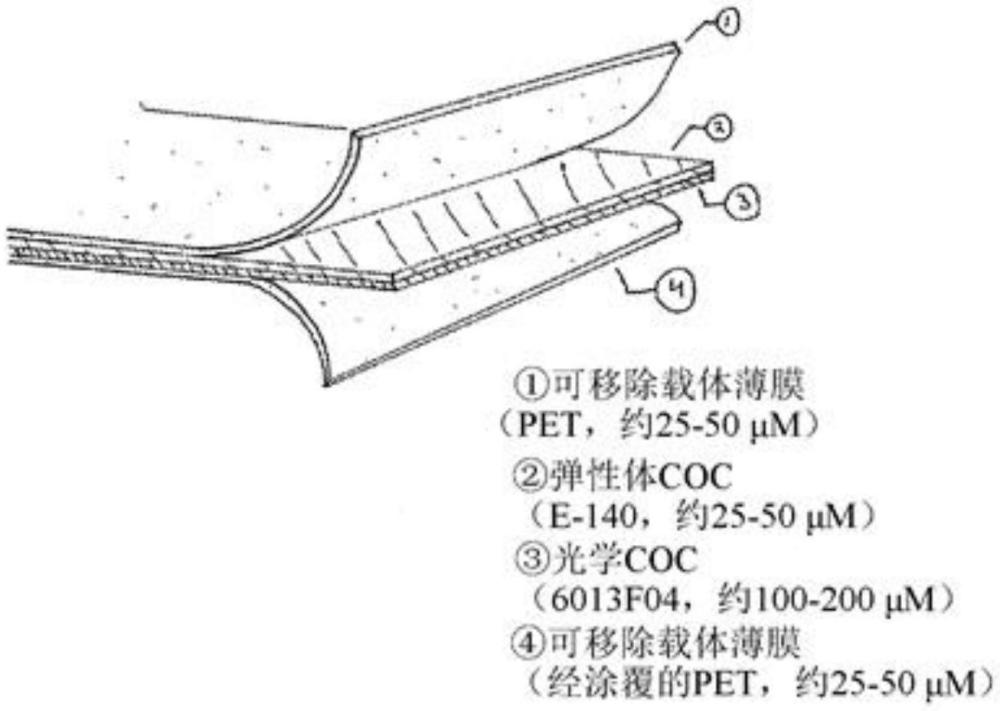
图1示出了:弹性体薄膜2,所述弹性膜为大约25-60微米,是由COC聚合物,如E-140形成的;光学薄膜3,所述光学膜的厚度为大约100-200微米,是由光学上澄清的聚合物,如COC,优选地6013F04形成的;以及可移除载体薄膜1、4,所述可移除载体薄膜是由聚合物,如聚对苯二甲酸乙二醇酯(“PET”)形成的,大约25-60微米厚。
图2是通过加热至约130℃的温度的经加热的辊式层压机将薄膜7,优选地与由如具有硅酮释放涂层的聚乙烯薄膜等材料形成的保护覆盖薄膜的组合发送在平坦基板上,以在微流控芯片上产生对齐的薄膜来将弹性体COC薄膜与如硅晶圆等平坦基板对齐的过程。最终产物通常将在顶部上具有可以容易地移除的保护薄膜、弹性体COC和/或聚甲基丙烯酸酯(PMMA)层、微流控芯片,所有这些均位于硅晶圆上。
图3是使用水薄膜的毛细管作用的用于蚀刻弹性体聚合物薄膜的水辅助的激光机加工技术的图。支撑材料可以是IR吸收的或者透射的,这取决于应用。
图4A-4D是具有负向特征的多孔真空卡盘的横截面视图,所述真空卡盘充当经热成形的弹性体膜的模具(图4A),其示出了真空使弹性体膜变形成模具(图4B),以产生独立的经热成形的膜(图4C),或者可以在热时与歧管键合(图4D)。
图5A和5B是示出环应变的滚动膈膜的透视视图。
图6A-6D是示出不同类型的滚动膈膜的示意图。图6A为外部滚动膈膜;图6B为内部滚动膈膜;图6C为形状变化膈膜;图6D为侧向滚动膈膜。
图7A-7E为使用滚动弹性体膈膜泵送的机构的示意图。使用气动压力源(+P)以使膈膜移位。使用真空(-P)以抽吸膈膜并填充储器。然后施加压力以进行移位冲程。流体抽吸之前,图7A;使用真空来填充储器,图7B;充满液体的室,图7C;向室施加压力,图7D;移位冲程结束,图7E。
图8A-8F是泵室40的示意图,其将理想的泵室44与未经优化的泵室46进行比较。图8A、8B、8C示出了理想的泵室44,与图8D、8E和8F的未经优化的室46相比,在理想的泵室中,膈膜20在致动期间保持与泵室44恒定接触,所述未经优化的室有使流体48被捕集在膈膜20内,从而导致移位体积不可预测的风险。图8G是膈膜与泵室壁之间的接触的展开视图。
图9A-9C是微流控压力调节器50的示意图,所述微流控压力调节器使用气动致动的弹性膜作为密封特征并且使用压缩气体作为偏压。流体使压力抵靠弹性膜堆积,直至所述压力战胜了由另一侧的压缩气体施加的压力。图9A、9B。一旦流体压力超过密封压力,流体就开始流动。图9C。可以通过调节压缩气体源来调节流体压力,并且可以通过增加流控回路中的顺应性来使流稳定。
图10是具有键合的弹性膜和限定的密封触点的阀的示意图。流体流可以是双向的。密封唇可以是小平坦表面或者如图所示的圆形形状。
图11是阀具有放大阀的入口处的密封压力的圆形密封特征,所述图在横截面中示出了阀与膜在密封界面处经历更高应变和接触压力。
图12A-12C是具有圆形密封表面的泪滴形状的阀。图12A是泪滴形状的阀的透视视图,所述阀具有圆形密封表面和减小阀的整体体积的泪滴形状。与相同大小的入口的圆形轮廓阀相比,泪滴形状减少了阀的死体积。此处是CAD中的泪滴阀的截图。密封形状呈红色虚线。图12B示出了集成在泵中的阀。图12C是集成在泵中的阀的横截面视图。图12D是比较各种阀(图8中的门垫阀、环阀、泪滴阀)的性能的图,其表明泪滴阀表现出优于先前设计的门垫阀的经改进的性能。
图13A-13C是几种不同类型的微流控蓄积器的示意图。图13A是使用柔性膜以使用膜中的所储存的弹性能来储存压力的蓄积器的示意图。图13B是使用小死端微流控通道以在压力下捕集气泡并储存体积的微流控蓄积器的示意图。图13C是使用在一侧用空气加压的活塞和储存在储器中的流体的微流控蓄积器的示意图。
图14A-14C是具有在一侧用空气加压的膈膜并且流体储存在储器中的无体积(图14A)、累积体积(图14B)和到达容量(图14C)的微流控蓄积器。
图15A-15B是具有光学水平仪和可变形膜的在弹性膜由于压力增加而变形之前(图15A)或之后(图15B)的压力传感器的示意图。图15A-15C是由相机检测到的在微流控通道中捕集的气泡长度的测量的示意图(图15A),以及低压力水平和高压力水平的图像(图15B),其中对于捕集气体,越长的通道越敏感(图15C)。越高的压力水平产生越短的气泡长度。
图16A-16E是用于微流控储器的液体感测方法的示意图,其中可变形膜在静水压力下被并入到培养基储器中,以改变电容、接触材料之间的电阻或光学性质(图16A)。图16B示出了膜在压力下偏转。图16C示出了具有澄清窗口或侧面的流体储器,其中流体水平的变化是由相机测量和记录的。图16D示出了类似的流体储器,其中相机被定位在储器上方。图16E是提取含有染料的流体的图像以提供光学测量结果的相机的示意图。
图17A-17D是用于细胞培养应用的可移除帽的示意图。帽上的光学上澄清的卡扣在图17A中示出。帽上或下的弹性体特征增加了顺应性,如图17B所示。由光学薄膜与用于密封的图案化粘合剂形成的帽在图17C中示出。帽的下方的压配密封或压缩弹性体特征在图17D中示出。
图18A-18D是使用可移除或可溶解的支撑结构来形成水凝胶的微流控隔室的示意图。可移除支撑结构在图18A、18B中示出;其中所产生的腔在移除后在水凝胶中形成流体通道,在图18C中以横截面示出;并且在18D中流过微流控容器中的水凝胶中的通道。
图19A-19D示出了流体传送通道如何可以沿着水凝胶细胞培养容器(图19A)的侧面产生,用培养基填充(图19B),然后插入到微流控装置中(图19C),其示出了装置的两端的上壁中的楔可以如何装配到微流控装置中以产生通道(图19D)。
图20A-20B是挨着脊状支撑结构定位的凝胶的横截面示意图,所述支撑结构约束向上膨胀以使顺应性膜变形的凝胶(图20B)。图20C示出了具有截挡水凝胶的可溶解柱或支撑结构的装置,所述水凝胶通过柱上方的端口插入到装置中,使得水凝胶共形于支撑结构指定的形状。图20D示出了完整的柱或支撑结构以及柱或支撑结构溶解后凝胶的横截面视图。图20E示出了在凝胶膨胀并且并受到柱或支撑结构约束直至柱或支撑结构溶解或被移除时的相同结构。图20F示出在柱的情况下的凝胶,其中凝胶被过度约束,图20G示出了没有柱的情况下的凝胶,其中凝胶可自由扩展。
图21A-21C是具有集成成像窗口的可填充隔室的截面示意图,所述可填充隔室使用旋转襟翼(图21B)代替支撑柱来遏制水凝胶,直到所述水凝胶凝固(图21A),然后所述旋转襟翼被旋转打开以允许水凝胶扩展(图21C)。
图22A-22D是横截面示意图,其示出了如何在用于在微流控装置中培养细胞的隔室中形成水凝胶之后移除塞(图22A),然后将隔室在顶部和底部处连接,以通过水凝胶通道传送营养物质和气体(图22B),其示出了接近水凝胶并且穿过水凝胶的流动培养基(图22C、22D)。
图23A-23E是通过表面张力保持在位的槽形状的悬滴水凝胶的横截面示意图(图23A、23B)、顶部视图和侧面视图(图23C、23D),其中凝胶膨胀以将培养基通道分离为两个通道(图23E);以及所产生的流构型:跨顶部和滴下方(图23F)、沿滴的长度(图23G)以及沿侧面和在微流控装置内(图23H)。
图24A-24D是用于竖直地(图24B)或在旋转机构上(图24C、24D)堆叠微流控装置(图24A)的电动气动歧管的示意图。
图25A-25F是微芯片的透视视图,所述微芯片插入到歧管中(图25A),锁住以固定在位(图25B),其中夹具或杠杆向下按压以固定芯片并压缩O形环以确保气动连接到芯片(图25C-25F)。图25C-25F是微流控芯片的使用压缩垫圈的快速释放闩锁的透视图,所述压缩垫圈是使用弹簧加载的杠杆、肘节夹具或过中心闩锁压缩的。图25D-25E是快速释放肘节夹具(图25D)或过中心闩锁(图25E)的横截面视图。
图26A-26D是标准芯片格式的透视视图(图26A)。图26A描绘了微流控芯片,所述微流控芯片具有键合在所述微流控芯片内的膜、分室的角和相比于显微镜载玻片减小的纵横比,以增强键合。图26B示出了排气口,所述排气口允许气体在膜与芯片键合时逸出。图26C是示出五层微芯片中的排气口的侧面视图。图26D和26E示出芯片具有凸起的边缘,所述边缘保护顶部和底部上的光学薄膜。
具体实施方式
I.定义
术语“微流控”是指涉及控制和操控尺寸为大约几微米至几厘米的通道中的小流体体积以及纳升至几毫升的尺度内的总系统体积的系统。如本文所用,术语
“通道”是指流体通过发生的闭合体积。通道的横截面面积和长度可以变化。通道可以具有方形、圆形或其它横截面形状。
术语“芯片”是指微流控流体操控发生的组件。芯片可以由各种各样的材料制成,并且可以为不同大小。“装置”是指执行一种功能或一系列功能的芯片或微流控系统。装置可以由一个或多个芯片组成。
如本文所用,术语“水凝胶”是指当有机聚合物(天然或合成)通过共价键、离子键或氢键交联以产生包裹水分子以形成凝胶的三维开放晶格结构时形成的物质。生物相容性水凝胶是指聚合物形成对活细胞无毒并且允许氧和营养物质充分扩散到包裹的细胞以维持活力的凝胶。
如本文所用,术语“胞外基质”,即“ECM”是指为周围细胞提供结构和生物化学支持的胞外大分子,如蛋白质、酶和糖蛋白的组分和/或网络。胞外基质包含填隙基质,并且ECM的基底膜组分包含蛋白聚糖硫酸乙酰肝素、硫酸软骨素、硫酸角质素;非蛋白聚糖多糖透明质酸;以及蛋白质胶原蛋白、弹性蛋白、纤连蛋白和层粘连蛋白。
如本文所用,术语“胞外基质结合肽”是指对于ECM组分具有亲和力的合成肽。
如本文所用,术语“水凝胶基质”通常是指形成水凝胶的交联聚合物的网络。水凝胶基质可以包含或可以不包含粘合剂。
术语相关区段中的“支架”是为组织构建体和ECM组分提供支撑的插入物或组件。
术语“培养基”是指用于细胞培养并且含有营养物质、生长因子或被包含在内以使细胞生长和增殖的其它生物分子的流体。
如本文所用,在聚合物的上下文中,术语“可生物降解”是指在生理条件下将通过酶促作用和/或水解降解或侵蚀为能够被代谢和/或消除的较小单位或化学物种的聚合物。
如本文所用,术语流体是指能够流动并且不是固体的材料。例如,空气和水都将被视为流体。
如本文所用,术语“渗透性的”是指特定化学物种通过材料运输的能力。例如,材料可以是氧渗透性的或水渗透性的。
术语“气动”是指使用空气压力或真空压力以进行操作的系统。如本文所用,术语“电动气动”是指依赖于电力地致动的阀和压力调节器来控制压力和真空信号的气动系统。
致动器是装置的负责移动和控制机构或系统,例如通过打开阀的组件。简单来说,其是“搬运工”。致动器需要控制信号和能量源来执行机械动作。
术语“互连”是指两个装置之间的其中电信号或流体可以从一个装置转移到另一个装置的连接点。互连可以使用某种类别的机构来耦合和解耦。
术语“垫圈”是指在被压缩在两个其它组件之间时形成可靠的且不透流体的密封的可压缩材料。
术语“顺应性(compliant)”或“顺应性(compliance)”是指材料或系统响应于力或加载条件的能力。顺应性系统是柔性的,并且允许力在系统中转换。在机械系统中,顺应性与刚度相反。
术语“过中心”是指机构的稳定物理状态和位置。相比于将机构保持在过中心状态所需的力,需要更多的力来逆转机构的位置。
如本文所用,术语“薄膜”是指通常在卷上产生的薄聚合物材料。“薄膜”的厚度通常为25-500微米,并且材料的特性可以变化。“共挤出的薄膜”是由多种由不同材料制成的材料组成的薄膜。“载体薄膜”是充当另一种薄膜的支撑材料或保护材料的薄膜。
术语“歧管”是指用于气动连接或流体连接的互连装置。歧管由内部通道组成,所述内部通道将压力或真空分配到另一个装置。歧管可以包含或可以不包含集成阀和致动器。歧管通常是指引导和分配空气和真空的组件,但也可以使用其它流体。歧管可以由多种材料制成,包含聚合物和金属。歧管可以使用一系列制造方法,包含用紧固件进行组装、键合和3D打印制造。
术语“高通量”是指系统一次控制多于一个装置或组件的能力。对于细胞培养,高通量系统将优选地允许同时控制数十个至数百个装置。
如本文所用,术语“调节器”或“压力调节器”是指将压力稳定并控制到设定值的组件。术语“调节”描述了调节器的功能输出。“背压调节器”控制调节元件之前的压力。“正向压力调节器”控制调节元件之后的压力。“差压调节器”控制跨调节元件的压差。
如本文所用,术语“蓄积器”是指在压力下储存一定体积的流体的组件。蓄积器允许流体体积暂时储存在系统中,并且充当用于压力和流速的动态变化的稳定元件。蓄积器可以在均匀压力下储存流体体积,或者压力可以基于蓄积器中的体积大小而变化。蓄积器可以是被动组件或主动控制的组件。
“阀”是在流体界面与固体界面之间产生密封的组件。阀阻止或限制流体的流动。“门垫阀”是使用平坦表面之上的薄襟翼以在以平坦表面为中心的一个或多个流控入口或出口之上进行密封的阀。
如本文所用,术语“传感器”是指用于测量系统的物理特性的组件。传感器可以直接测量特性,或者可以由一些其它观察到的现象推断测量结果。
如本文所用,术语“死体积”是指芯片或装置中被视为是不必要或无用的任何体积。
“储器”是储存流体体积的组件。
“帽”是用于覆盖和密封组件的组件。帽可用于覆盖储器,但也可用于覆盖其它组件。
如本文所用,术语“组织隔室”是指培养所细胞的装置的区域。组织隔室可以由水凝胶或其它ECM材料组成,并且可以在大小和形状上变化。可以使用不同的组织。
如本文所用,术语“以偏转”是指平面物体,如弹性体膜的移动,其中物体的一部分远离围绕物体的表面区域的平面移动,即从所述平面偏转。
如本文所用,术语“膜”是指材料的薄膜,所述薄膜可以是可渗透的、半渗透的或不渗透的,这取决于应用。膜可以由多种材料制成,包含例如COC、聚碳酸酯和PTFE。膜可以是刚性的或柔性的,这取决于应用。
术语“键合”或“键合的”是指两种材料由于共价分子键、聚合物的交联或一些其它分子粘附力而连接在一起的状态。键合可以利用溶剂、使用等离子体的表面活化、热、压力和时间来产生。
术语“机加工”是指通过其从基板上移除材料的任何减材制造过程。
术语“固定装置”是指将另一个组件或装置固持在位以进行一些其它操作的组件。
术语“卡盘”是指固持在平坦表面上的固定装置。
术语“光学上澄清的”和“光学澄清度”是指材料在宽范围的波长内的透明度。光学上澄清的材料从紫外线到近红外光谱的透射率将为约95%,并且将具有与玻璃类似的折射率。
如本文所用,术语“移位体积”或“移位冲程”是指描述泵的每一个动作(冲程)所移位的流体的体积的致动参数。其可以被分段以描述阀-泵室-阀构型的泵的阀或泵室中的每一者的每个动作或通过整个泵的动作移位的体积。移位体积也可以被分段来描述每一个阀动作(冲程)由阀的流控侧、气动侧或在两侧上移位的体积。
如本文所用,术语“密封压力”是指为至少接触时的压力与进行接触所需的压力之间的差(密封压力=(接触时的压力)-(进行接触所需的压力))的压力。
如本文所用,术语“主体”在致动器的上下文中是指具有对称,如关于水平轴、垂直轴或两者对称,或以一定角度对称的轴的三维形状的物体。主体通常包含彼此相对并且沿着垂直对称轴彼此对称的两个突出部分的至少一个集合。主体可以包含两个部分的多于一个集合,如两个集合、三个集合、四个集合等。两个突出部分可以是成字母I、L、P等的形状的三维物体。例如,主体可以是I型形状的,其包含两个突出部分的一个集合,其中I形状的主体的每一端接触平行于竖直对称轴的平面。在另一实例中,主体可以是U型形状的,其包含成字母L的形状的两个突出部分的一个集合,其中每个突出部被定位成彼此相对。通常,在此实例中,突出部的端部接触垂直于竖直对称轴的同一平面。主体可以具有成金字塔、椭圆形、正方形、长方形、圆形的形状或任何其它形状的横截面区域。
热塑性塑料是在特定温度下熔融并且能在熔融状态下流动的聚合物材料。在某种温度下,热塑性塑料将达到“玻璃化转变”,其中分子键是移动的,并且材料在分子尺度上处于运动中。热塑性塑料可以多次重复这些转变。
弹性体是非常有弹性的、轻度交联的并且无定形的或半结晶的其中玻璃化转变温度远低于室温的聚合物。其可以被设想成一个宏观大小的非常大的分子。交联完全抑制不可逆的流,但链在高于玻璃化转变的温度下非常具有柔性,并且小的力导致大的变形(与其它聚合物相比,低杨氏模量(Young's modulus)和非常高的断裂伸长率)。弹性体可以被分类为三个大类:二烯弹性体、非二烯弹性体和热塑性弹性体。二烯弹性体是由含有两个连续双键的单体聚合的。典型实例为聚异戊二烯、聚丁二烯和聚氯丁烯。非二烯弹性体包含丁基橡胶(聚异丁烯)、聚硅氧烷(硅橡胶)、聚氨酯(spandex)和氟弹性体。非二烯弹性体在结构中没有双键,并且因此,交联需要硫化以外的其它方法,如添加三功能单体(缩合聚合物)或添加二乙烯基单体(自由基聚合)或与少量如丁二烯等二烯单体共聚。如SIS和SBS嵌段共聚物等热塑性弹性体和某些聚氨酯是热塑性塑料并且含有刚性(硬)和软(橡胶)重复单元。当从熔体状态冷却到低于玻璃化转变温度的温度时,硬块相分离以形成刚性域,所述刚性域作用于弹性体块的物理交联。制造弹性体部件是按以下四种方式之一实现的:挤出、注射模制、传递模制或压缩模制。
水凝胶是交联是聚合物网络,其膨胀并且将显著级分的水截挡在其结构内,但不会溶解于水。大多数水凝胶是天然材料,如细胞外基质提取物
术语“约”的使用旨在描述在大约+/-10%的范围内高于或低于所陈述值的值;在其它实施例中,这些值的范围可以在大约+/-5%的范围内高于或低于所陈述值。
II.制造热塑性微流控装置的新材料和方法
A.环烯烃共聚物(“COC”)弹性体键合过程
大多数微流控系统中使用的材料PDMS,即聚二甲基硅氧烷,也被称为二甲基聚硅氧烷或二甲硅油,属于通常被称为硅酮的聚合有机硅化合物的组。PDMS由于其对应用的歧管的通用性和特性而是最广泛使用的基于硅的有机聚合物。其在光学频率(240nM-1100nM)下是透明的,这有助于在视觉上或通过显微镜观察微通道中的内容物。其自体荧光度低,并且其被视为为是生物相容性的(有一些限制)。
PDMS通过简单的等离子体处理与玻璃或另一种PDMS层紧密地键合。这允许多层PDMS装置的产生利用通过玻璃基板提供的技术可能性,如使用金属沉积、氧化沉积或表面官能化。PDMS是可变形的,这允许使用PDMS微通道的变形集成微流控阀,允许易于连接防漏流控连接件并且允许其用于检测非常低的力,如来自细胞的生物力学相互作用。与先前使用的材料(例如,硅)相比,PDMS是价格低廉的。PDMS也易于模制,因为即使在与交联剂混合时也是如此,并且将液体在室温下保持数小时。PDMS是可气体渗透的。其通过控制气体通过PDMS或终死端通道填充的量来实现细胞培养(液体压力下的残余气泡可以通过PDMS逸出,以平衡大气压力)。
然而,PDMS对于微流控应用的问题包含疏水分子的吸收以及在PDMS上进行金属和培养基沉积的困难。这严重限制了电极和电阻的集成。此外,PDMS会老化,因此在几年后,这种材料的机械性能发生变化。对于药物筛选,PDMS会产生问题,因为PDMS吸附疏水分子,并且可以使一些分子从不良交联中释放到液体中。PDMS对于水蒸气也是渗透性的,这使得PDMS装置中的蒸发难以控制。PDMS对一些化学物质的暴露很敏感。
这些问题使得PDMS不适于药物筛选和开发。
可以使用弹性体材料,如可从德国劳恩海姆的
本文描述了在屏障、光学窗口、泵送和传感器应用的许多优点和用途。
使用弹性体材料的薄膜和良好控制的热工艺将COC材料(主要地
这些材料也可以作为由TOPAS 6013f-04和E-140级COC的混合物制成的易于键合的光学薄膜产生。在更优选构型下,薄膜可以作为与2密耳E-140树脂键合的8密耳(1密耳=0.001")厚的o 6013f-04层大量产生。6013侧是用2密耳厚的聚乙烯载体薄膜保护的,并且E-140侧是用同样2密耳厚的高温Mylar薄膜保护的。这4个层提供了无菌薄膜,所述无菌薄膜可以被切割成用于在微流控芯片的顶部上键合的大小。mylar薄膜在键合之前易于移除,并且聚乙烯保护膜可以在成像之前移除。材料可以在生产环境中作为材料辊大量产生以用于制造许多微流控芯片。
使用经加热的层压机对薄弹性体薄膜和共挤出的6013/E-140薄膜的热键合也是可能的。所述过程涉及将薄膜与芯片对齐,使得E-140与键合的平面接触,并使芯片穿过层压机。E-140与硅酮释放衬垫一起固持在PET载体薄膜上,并且支撑在平坦薄基板上,通常硅晶圆上。晶圆提供支撑,使得膜或薄膜在键合过程期间不会翘曲。
在一个实施例中,层压的薄膜由被设计成用于在键合微流控中应用的四种聚合物薄膜组成。这四种聚合物薄膜如下:
1.2密尔厚的高温Mylar(PET)层,其用于在键合之前保护E-140。在键合之前防止灰尘、刮伤和污染。可手动移除。
2.与6013F-04层键合的2密耳TOPAS E-140层。用作易于熔融和键合的层。
3.8密耳TOPAS 6013F-04层,其用作光学材料。层的厚度可以在期望更大的刚度或降低的厚度的情况下改变。8密耳是成像能力与薄膜强度之间的良好平衡。
4.2密耳PE薄膜。PE薄膜易于移除,并且起到保护光学材料免受划伤的作用。
请注意,1密耳=0.001"并且是薄光学薄膜的厚度测量标准。
这种材料使键合COC微流控芯片的能力极大改进,并且允许商业层压工艺大规模键合装置。此薄膜与COC的键合强度为大约28psi通道压力。薄膜还与玻璃和PMMA类聚合物键合。
键合过程保留了COC材料的光学澄清度(280-800nm),同时提供了高键合。对于在实验室中键合部件来说,此工艺也是更安全的并且更少设备的密集型解决方案。键合COC的其它方法通常涉及加热压机或环己烷(一种高度易燃的且有毒的有机溶剂)。
图1示出了:弹性体薄膜2,所述弹性膜为大约25-60微米,是由COC聚合物,如E-140形成的;光学薄膜3,所述光学膜的厚度为大约100-200微米,是由光学上澄清的聚合物,如COC,优选地6013F04形成的;以及可移除载体薄膜1、4,所述可移除载体薄膜是由聚合物,如聚对苯二甲酸乙二醇酯(“PET”)形成的,大约25-60微米厚。
图2是通过加热至约130℃的温度的经加热的辊式层压机13(1)将薄膜7,优选地与由如具有硅酮释放涂层的聚乙烯薄膜等材料形成的保护覆盖薄膜8(2)的组合发送在平坦基板11(5)上,以在微流控芯片9(4)上产生对齐的薄膜来将弹性体COC薄膜7(3)与如硅晶圆11(5)等平坦基板对齐的过程。最终产物通常将在顶部上具有可以容易地移除的保护薄膜、弹性体COC和/或聚甲基丙烯酸酯(PMMA)层、微流控芯片,所有这些均位于硅晶圆上。
B.薄弹性体薄膜的水辅助CO2激光机加工
已经开发了一种用于在最小热损伤的情况下对薄弹性体薄膜和其它聚合物薄膜进行激光机加工的方法。所述激光方法涉及使用毛细管作用将聚合物层层压到水薄膜上。水层起到吸收杂散热和IR的作用并且充当材料的工件固持特征,使得材料不会在激射过程期间移动或剥离。材料还可以使用毛细管辅助方法层压到IR透射材料,如锗、IR聚合物或蓝宝石上。
当用CO
图3是水辅助的激光机加工技术120的示意图。使用水薄膜262的毛细管作用将薄弹性体聚合物薄膜260向下固持在如玻璃、锗、蓝宝石、冰或IR聚合物等基板上。水262将切割的薄膜266向下固持,并且吸收来自激光机加工过程的一些杂散能量。
C.基于溶剂的COC胶
溶剂粘合剂在将两个部件永久地键合在一起方面起着关键作用。经预先混合的胶更安全且更易于使用。
快速且均匀地施涂粘合剂层的能力提供了用于键合平坦表面的新方法。此技术很简单并且可以易于在实验室或制造管线中完成。此方法可以用于许多种类的粘合剂,而不仅仅是可UV固化的粘合剂。
由溶解的环烯烃共聚物(COC,
D.用于薄聚合物/弹性体薄膜的选择性形成和键合的技术
已经开发了一种用于在热键合过程中选择性地键合平坦基板的区的方法。用非相互作用的材料涂覆被设计成保持未键合的区。永久性标志物和牛血清白蛋白(“BSA”)已被证明是用于选择性地键合COC基板的简单且生物相容性物质。此方式已应用于弹性体材料键合工艺,但也应可用于其它热键合的材料。
另一种键合程序涉及在键合过程期间通过将材料真空处理成半多孔材料,如多孔陶瓷来对膜进行热成型,如图4A-4D所示。半多孔材料的形状限定了膜变形成的负向模具。如果材料在键合过程期间被保持处于其熔点,则其将在键合过程后保持其形状。应用包含泵膈膜制造和阀开发。
任何加压的表面将在热过程期间键合。一些组件,如门垫阀,需要保持是未键合的,但将表面保持为表面接触。在不能够控制哪些表面键合并且哪些表面不键合的情况下,难以控制装置设计的表面特性,并且还难以确保装置中的流体通道不受阻。
使用真空形成的膜的选择性键合技术利用并入到热键合的装置的一侧的并且形成为膜的预期负向形状的半多孔材料。将层组装,并且将膜夹持在两个基板之间。向半多孔材料施加真空,从而使膜变形成半多孔特征的形状。在热键合步骤中使用热和压力以将膜与装置的两个半部键合。膜不与半多孔材料键合。半多孔材料的形状在键合后被膜截挡。
图4A-4D是具有负向特征的多孔真空卡盘的横截面视图,所述真空卡盘充当经热成形的弹性体膜的模具(图4A),其示出了真空使弹性体膜变形成模具(图4B),以产生独立的经热成形的膜(图4C),或者可以在热时与歧管键合(图4D)。图4A-4D示出了具有经机加工的模具特征272的多孔陶瓷真空卡盘270的使用,所述多孔陶瓷真空卡盘充当用于经热成型的弹性体膜274的模板。将膜材料274铺设在多孔碳材料276上,并且施加真空278。负压将膜拖入到模具的负向特征中。施加热280以达到或超过膜的熔点。然后可以使膜274冷却并且从多孔碳卡盘276中释放,或者可以在热时压靠另一个聚合物装置以产生永久键合的膜278。
E.使用激光切割的弹性体薄膜进行的3D流体路由
薄弹性体薄膜上的激光加工和键合过程在不需要热压印、机加工或其它工艺的情况下实现了微流控通道的3D路由。
3D流体路由可以使用激光切割粘合剂材料来实现,但弹性体是用于产生微流控通道的更稳健且耐溶剂的选项。此方法确保了通道厚度得到很好控制,并且是用于低体积流体路由的更好方法。
III.用于微流控装置的片上控制和感测元件
A.环烯烃共聚物(“COC”)弹性体结构
可以使用弹性体材料,如可从德国劳恩海姆的
B.轧制的弹性体膈膜
已经开发了一种具有应力消除特征的弹性体膈膜,所述弹性膈膜用于微流控阀和泵膈膜。膜的特征在于,在致动而非经历弹性变形期间轧制的经热成型的半圆形区段。膈膜还被设计成就位在类似几何形状的歧管上。膜的致动是使用压缩气体和真空完成的。泵室可以被设计成具体移位体积,并且阀可以被设计成在设定压力下密封。
滚动膈膜也可以由除了热塑性弹性体之外的其它材料制成,所述热塑性弹性体包含热塑性薄膜、橡胶片和硅酮。可以探索各种形状的滚动膈膜,以适应不同的应用(即阀、蓄积器和泵室)。优化可以在FEA软件中使用迭代模拟来完成。
这些轧制的膈膜的制造是由使用多孔碳卡盘和键合进行的热成型促进的。
弹性体微型泵和阀在可靠性和良好控制的流体移位方面存在问题。这种阀设计提供了一种用于致动各种材料的弹性膜以使其更稳健且有效的低应变方法。这种设计使得更易于确定阀的密封压力和泵室的移位体积。这种类型的膈膜经历有限量的弹性应变,并且减少膈膜的塑性变形和疲劳失效的机会。应用包含泵室、阀、体积储存器和流控蓄积器。
图5A和5B是示出环应变的滚动膈膜10的透视视图。滚动膈膜10具有滚动唇12以及唇14和环16。
图6A-6D是示出不同类型的滚动膈膜的示意图。图6A为外部滚动膈膜20;图6B为内部滚动膈膜22;图6C为形状变化膈膜24;图6D为侧向滚动膈膜26。
每种类型的膈膜都可以由各种聚合物和热塑性弹性体热成型。每种类型在体积移位和应变管理方面都具有独特的优势。
C.经优化的膈膜泵室
已经开发了具有经优化的泵室的膈膜微型泵,所述经优化的泵室确保可靠的移位和提高的可靠性。一个泵室的特征在于,滚动膈膜,并且一个泵室的特征在于,具有可预测的移位冲程的泵室。
图7A-7E为使用滚动弹性体膈膜泵送的机构的示意图。使用气动压力源(+P)以使膈膜移位。使用真空(-P)以抽吸膈膜并填充储器。然后施加压力以进行移位冲程。流体抽吸之前,图7A;使用真空来填充储器,图7B;充满液体的室,图7C;向室施加压力,图7D;移位冲程结束,图7E。图7A-7E为使用滚动弹性体膈膜20泵送的机构的图。使用气动压力源(+P)30以使膈膜20移位。使用真空(-P)32以抽吸膈膜20并填充储器34。然后施加压力30以进行移位冲程。
滚动膈膜泵室30使用滚动膈膜32来使室中的流体体积移位。室包含流控入口和阀。膈膜可以使用压缩气体和真空来致动。可以使用任何类型的滚动膈膜,但具有内部滚动机构的膈膜是优选的。
第二泵室设计是保证从泵室中的完全流体移位的经优化的形状。室几何形状被设计成围绕柔性膜在加压负载下的弹性响应,使得膜在泵冲程期间与泵室保持接触环,如图8A-8F所示。这一特征消除了小袋流体被捕集在膈膜中的机会,并且确保可靠的移位体积。泵室还被设计成保持流体的特定体积。
图8A-8F是泵室40的示意图,其将理想的泵室44与未经优化的泵室46进行比较。图8A、8B、8C示出了理想的泵室44,与图8D、8E和8F的未经优化的室46相比,在理想的泵室中,膈膜20在致动期间保持与泵室44恒定接触,所述未经优化的室有使流体48被捕集在膈膜20内,从而导致移位体积不可预测的风险。图8G是膈膜与泵室壁之间的接触的展开视图。
图8A-8H是泵室40的示意图,其将理想的泵室44与未经优化的泵室46进行比较。图4A、4B、4C示出了理想的泵室44,与图4D、4E和4F的未经优化的室36、38、40相比,在理想的泵室中,膈膜20在致动44期间保持与泵室44恒定接触,所述未经优化的室有使流体48被捕集在膈膜20内,从而导致移位体积不可预测的风险。
由于文献中的大多数泵室的特征在于,圆柱形孔洞和在无约束的情况下弯曲到孔洞中的膈膜,因此,此替代性实施例不提供应变管理,并且不提供用于泵的单次冲程的确定性移位体积。滚动膈膜泵室提供了低应变且体积约束的泵室。
D.片上微流控压力调节器
已经设计了使用气动致动的弹性膜62作为密封特征并且使用压缩气体64作为偏压元件的微流控压力调节器60,并且所述微流控压力调节器在图9A-9C中示出。图9A-9C是微流控压力调节器60的示意图,所述微流控压力调节器使用气动致动的弹性膜作为密封特征并且使用压缩气体作为偏压。流体使压力抵靠弹性膜堆积,直至所述压力战胜了由另一侧的压缩气体施加的压力。图9A、9B。一旦流体压力超过密封压力,流体就开始流动。图9C。可以通过调节压缩气体源来调节流体压力,并且可以通过增加流控回路中的顺应性来使流稳定。
这种背压调节器60使用滚动膈膜62作为密封和感测元件。当上游压力64超过压力设定值66时,膈膜62被移位,直到流体68能够流过膈膜室72的侧面70。当压力设定值66大于上游压力64时,室72的侧面74发生密封。流体68使压力抵靠膈膜62的弹性膜堆积,直至所述压力战胜了由另一侧的压缩气体66施加的压力。一旦流体压力76超过密封压力,流体68就开始流动。可以通过调节压缩气体源64来调节流体压力,并且可以通过增加流控回路中的顺应性来使流稳定。
此调节器是第一片上压力调节器。压力驱动的流系统是常见的并且可商购获得的,但这些系统依赖于流体力学来确定系统流量。此技术使得能够通过使用任何体积控制的泵来控制系统压力。
研究表明,微流控蓄积器和调压的阀可以充当芯片上的压力调节装置。其使用压力源和膈膜泵将流体压力调节到14psi。
E.经优化的微流控膈膜阀
用于对流体通过进行片上控制的主动微流控阀的特征在于半圆形唇,所述半圆形唇限定弹性膜的接触线,如图10所示。图10是具有键合的弹性膜92和限定的密封触点94的阀90的简图。流体流可以是双向的。密封唇94可以是小平坦表面或者如图所示的圆形形状。
密封表面96仅位于阀的一个入口98上,并且另一个流体入口100不与弹性膜接触。弹性膜92是使用压缩气体致动的并且与流控歧管的单独半部102、104键合。这种阀设计允许双向流体流动。
这种设计避免了难以产生可靠密封的许多弹性体膈膜阀的问题。门垫阀和单向襟翼阀在密封表面周围出现薄膜流体流动和流体蠕变。
图11是阀具有放大阀的入口处的密封压力的圆形密封特征,所述图在横截面中示出了阀与膜在密封界面处经历更高应变和接触压力。
图12A-12C是具有圆形密封表面的泪滴形状的阀。图12A是泪滴形状的阀的透视视图,所述阀具有圆形密封表面和减小阀的整体体积的泪滴形状。与相同大小的入口的圆形轮廓阀相比,泪滴形状减少了阀的死体积。此处是CAD中的泪滴阀的截图。密封形状呈红色虚线。图12B示出了集成在泵中的阀。图12C是集成在泵中的阀的横截面视图。图12D是比较各种谷(图8中的门垫阀、环阀、泪滴阀)的性能的图,其表明泪滴阀表现出优于先前设计的门垫阀的经改进的性能。
通过减小阀的总体积,可以对阀进行进一步的改进。这种阀的优选构型是泪滴形状,所述泪滴形状产生了用于阀的出口的流体路径,但不增加径向于密封表面的额外体积。阀的形状是梯形的,以减小体积,但也提供了光滑且连续的表面。
F.微流控蓄积器
流控蓄积器在大规模液压回路中起关键作用,但尚未商业地开发用于微流控系统。蓄积器通过在压力下临时储存流体体积来满足缓冲流体流的需要。这些组件类似于电路中的电容器。
图13A-13C是几种不同类型的微流控蓄积器的示意图。图13A是使用柔性膜以使用膜中的所储存的弹性能来储存压力的蓄积器的示意图。图13B是使用小死端微流控通道以在压力下捕集气泡并储存体积的微流控蓄积器的示意图。图13C是使用在一侧用空气加压的活塞和储存在储器中的流体的微流控蓄积器的示意图。
可以使用几种不同类型的微流控蓄积器以将加压的流体储存在微流控芯片中。压力使用压缩气体、表面张力现象或弹性应变能储存。微流控蓄积器110可以使用滚动膈膜112,如图13A-13C所示。膈膜112是用一侧的空气114加压的,并且流体116储存在下面的储器118中。当流体体积超过空气压力时,膈膜112能够移动以储存过量体积。
蓄积器110使用柔性膜112以储存压力。弹性变形产生了组件的体积的变化。这种种类的蓄积器可以通过改变膜的背面的压力并且通过改变膜的大小(即厚度和直径)来进行调谐。
图13B所示的微流控蓄积器120可以使用小死端微流控通道122来捕集气泡124并在压力下储存体积。当更多体积进入通道112时,气泡124被捕集并压缩。在独立的微流控芯片上成功地对这种类型的蓄积器进行了测试。
图13C所示的微流控蓄积器130可以使用低摩擦活塞132来储存流体体积。空气压力134施加到活塞132的背面,并且对另一侧的流体136加压。流体136储存在活塞的孔洞138中。
图14A-14C是具有在一侧用空气加压的膈膜并且流体储存在储器中的无体积(图14A)、累积体积(图14B)和到达容量(图14C)的微流控蓄积器。微流控蓄积器140可以使用滚动膈膜142,如图14A-14C所示。膈膜142是用一侧的空气144加压的,并且流体146储存在下面的储器148中。当流体体积超过空气压力时,膈膜142能够移动以储存过量体积。
G.使用弹性膜偏转和捕获的气体蓄积器进行的压力感测
利用在压力下偏转的弹性膜和光学杠杆的压力传感方法。可以用反射材料涂覆膜以反射入射光。激光可以瞄准膜并且可以从膜表面反射回。激光可以被引导到光电检测器,所述光电检测器感测位置或光强度。如果选择了光强度,则可以使用衍射光栅以基于光栅上的位置来分割光。
光学杠杆可以提供压力感测方法,所述压力感测方法对于压力的甚至少的变化极其敏感。市场上的大多数压力传感器感测psi级的压力,而一些微流控应用需要psi的分数的压力感测。
捕获的气体压力传感器是有用的,因为感测特征(相机)不是微流控装置的一部分,并且因此不会增加芯片的成本。此传感器也是线性的,这使得校准和测量更容易。
如图15A-15B所示,可以利用特征为光学杠杆212和可变形膜214的压力传感器210。膜214可以是反射材料或可以具有折射率特性。激光216瞄准膜214并且从膜表面反射回。输出角218随着压力下的膜偏转220而变化。激光输出222入射到光电检测器224上。还可以实施衍射光栅和强度测量或位置感测方法。
还可以利用使用捕集的气体微流控蓄积器的特性的压力感测,如图15A-15C所示。气泡232的长度与微流控通道中的液体236的压力234成比例。随着压力234时捕集的气体堆积,气泡232被压缩,并且可以使用相机238或其它光学检测器来感测气泡或液相的长度的变化。
H.液体水平感测
许多大规模流控系统中可以存在液体水平传感器,但存在很少用于跟踪微流控芯片中的流体体积的技术。以非侵入性且准确的方式感测流体体积有助于监测板载流控,并且确定何时需要更换流体或将流体输送到芯片的其它部分。这还可以有助于控制芯片上的静水压力。
小型微流控储器的液体水平感测方法可以利用在静水压力下偏转的可变形膜。可以使用直接测量、光透射率和颜色饱和度特性或锥形储器来完成通过利用相机在视觉上跟踪储器中的流体高度进行的水平感测。
用于微流控储器的液体感测方法在图16A-16E中示出。图16A-16E是用于微流控储器的液体感测方法的示意图,其中可变形膜在静水压力下被并入到培养基储器中,以改变电容、接触材料之间的电阻或光学性质(图16A)。图16B示出了膜在压力下偏转。图16C示出了具有澄清窗口或侧面的流体储器,其中流体水平的变化是由相机测量和记录的。图16D示出了类似的流体储器,其中相机被定位在储器上方。图16E是提取含有染料的流体的图像以提供光学测量结果的相机的示意图。
并入到培养基储器242中的可变形膜240可以在静水压力下偏转244。膜接触240另一个表面以改变电容、接触材料之间的电阻或者可以使用光学系统246观察(图16A)。另外的光学感测方法包含从微流控装置的侧面观察液体水平以供直接测量或由以上使用相关测量结果进行观察(图16B、16C)。具有一定锥度的储器250可以被设计成使得流体的自由表面积随流体高度而变化。还可以利用光透射率和颜色饱和度特性(图16D、16E);颜色饱和度和光透射率将是储器中的流体高度的函数。
I.用于细胞观察和操控的微流控帽
微流控装置的无菌性和易于获取是许多片上实验室应用和实验应用的关键。例如,能够更换培养基并操控细胞培养需要针或移液管的装置获取。提供了与芯片交互的简单且无菌的方式的新类型的帽将使得这些程序可用于微流控芯片。理想地,这些帽是光学上澄清的以允许进行成像或背景照明。进一步地,单次使用和一次性帽有助于灭菌原因。
图17A-17D是用于细胞培养应用的可移除帽的示意图。帽上的光学上澄清的卡扣在图17A中示出。帽上或下的弹性体特征增加了顺应性,如图17B所示。由光学薄膜与用于密封的图案化粘合剂形成的帽在图17C中示出。帽的下方的压配密封或压缩弹性体特征在图17D中示出。
在图17A中所示的一个实施例中,可以将可移除帽包含在内以用于细胞培养。帽150的顶部152是光学上澄清的,并且能够密封154。密封可以通过压配、夹紧垫圈或橡胶/弹性体密封件来完成。帽150可以被移除以用于培养采样和操控。压配可以如艾本德管(Eppendorf tube)和PCR帽中使用的那样进行定义。这与细胞培养领域的许多帽设计类似。
密封特征还可以通过将键合的弹性体特征156的部分暴露于帽产生,如图17B所示。这增加了顺应性,以允许密封表面良好限定。
压配帽或有垫圈接口的替代方案是如图17C中所示的粘合地键合的窗口。“帽”可以由具有图案化粘合剂的光学薄膜组成,所述图案化粘合剂用于将光学薄膜密封到装置上。这种类型的密封特性可以提供用于密封微流控芯片的无菌、单次使用的且廉价的方法。
如图17D所示,帽可以具有压配密封件或可以使用某种类型的压缩弹性体特征160。暴露的弹性体材料可以充当用于密封帽的垫圈,所述帽可以使用应变能或夹具/闩锁压缩。可以使用粘合剂贴纸以密封微流控装置的平坦表面。
J.与微流控芯片的气动连接
大多数商业上可获得的气动连接器是单次单管,或其特征在于,螺纹紧固件。这些操作浪费时间,这对一些实验的结果至关重要。快速连接机构是有用的,因为在微流控实验中的一些操作是时间敏感的。例如,芯片不能持续延长的时间段断开泵送。然而,在获取流体体积、操纵细胞培养物或在显微镜上拍摄图像时,可能需要断开连接。
如图11-12所示,气动管线与微流控芯片的快速连接可以通过弹簧加载的垫圈或夹紧垫圈实现。将微流控芯片与气动管线快速连接和断开的能力促进微流控芯片在对所有气动连接进行可靠密封的情况下进行快速更换。
微流控芯片170的快速释放特征可以并入压缩垫圈或使用弹簧178加载的杠杆174、肘节夹具176或过中心闩锁180压缩的O形环172的阵列,如图11、12A和12B所示。这些夹持机构促进在无需使用工具或螺钉的情况下将气动管线和流控管线容易地连接到微流控芯片。
K.用于致动泵膈膜的动态控制的压力调节
泵膜的快速致动导致流速瞬时达到峰值,这可能会对流稳定性产生负面影响。在生物应用中,对微型泵的动态致动意味着显著剪切应力,这可能影响并潜在地伤害活组件。
在一个实施例中,系统构成用于泵室的动态压力控制的可编程压力源。用于致动弹性膜的压力由真空缓慢地控制到正压,使得膜缓慢地弯曲。泵室的逐渐致动降低了泵送系统的脉动性并稳定了泵流。
L.用薄弹性体薄膜制成的微流控氧合器
氧合在细胞培养和片上实验室应用中起着关键作用。已经开发了一种具有生物相容性的且低吸收的可气体渗透的膜的微流控氧合器。长纵横比微流控通道产生了用于气体转移的大扩散表面,并且薄膜促进最优气体转移。可气体渗透的材料优选地为弹性体,如环烯烃共聚物(COC)。其是通过使用茂金属催化剂使降冰片烯和乙烯共聚产生的透明的无定形热塑性塑料。这些共聚物具有许多有吸引力的光学特性,包含高澄清度、高透光率、低双折射率和高折射率。其它性能优势包含优异的生物相容性、非常低的吸湿性、良好的耐化学性、优异的熔体可加工性和可流动性,以及高刚性、弹性模量和强度,这些特性在约-50℃到接近其玻璃化转变温度的宽温度范围内保持不变。
替代性弹性体材料包含(苯乙烯-乙烯-丁烯-苯乙烯(SEBS)或薄刚性材料,如聚醚醚酮(PEEK)、聚芳醚酮(PAEK)家族中的无色有机热塑性聚合物、具有保持到高温的优异的耐机械和耐化学特性的半结晶热塑性塑料、全氟烷氧基烷烃(PFA、PTFE)是四氟乙烯和全氟醚的共聚物,其特征在于高耐溶剂性、耐酸性和耐碱性或耐PTFE性。根据气体输运特性,可以考虑其它材料。氧气运输的性能可以通过材料的氧气透过率来确定,所述氧气透过率是通过ASTM D3985确定的。氧合器的经改进的性能可以使用更高浓度的氧气、增加气体的分压并且潜在地通过使气体在转移表面之上流动实现。气体交换可以使用来自氧气传感器的反馈进行监测。
COC弹性体可以以长且薄的纵横比键合,以供氧合器设计使用。其它材料可能需要不同的层压工艺。
IV.水凝胶支架
A.使用大孔弹性体薄膜的细胞支撑支架
光学上澄清的、低刚度的细胞支撑支架在细胞生物学中具有广泛的应用。大多数可商购获得的细胞支撑支架不是图像友好的,并且是由刚性材料,通常地聚苯乙烯制成的。
要用于微流控芯片和跨孔插入物的细胞支撑支架是由疏水弹性体制成的,所述疏水弹性体是光学上澄清的,自体荧光度低。孔径可以根据具体应用定制,但由于材料的疏水性质,即使是大孔(约1mm直径)也是可能的。这种结构可以用于使细胞悬浮在液体或载有细胞的水凝胶中。这种类型的支架是低模量的,这为细胞粘附和应力响应带来益处。
B.铸造作为细胞支架的水凝胶结构
水凝胶遏制提供了通常用于类似装置的弯月面固定的技术的替代方案。这种设计为实验提供了益处,因为其允许凝胶膨胀,允许直接进入细胞培养,并且提供了用于凝胶安装的更灵活且更可靠的解决方案。
将载有细胞的水凝胶安装到微流控装置中。将水凝胶注入到单独的隔室中,并且然后聚合。如果需要的话,允许水凝胶通过液体吸收的方式膨胀。然后,可以将胶囊插入到具有流控连接件和有衬垫接口的微流控芯片中。此隔室的一个实施例包含充当微流控通道的模板的可移除结构。胶囊的基部是图像友好的材料,使得可以原位观察生物微观结构和细胞行为。这些水凝胶隔室被具体设计成促进两个培养基通道之间的可灌注血管网络。
C.将销插入到水凝胶中以稳定凝胶
特征在于可移除支撑结构292的水凝胶隔室290在图19A-19D中示出。容器294固持水凝胶296,所述水凝胶覆盖有培养基298。将销292插入到水凝胶室296中以稳定如此形成的凝胶。
一旦销292被移除,销腔300(图15B、15C)就可以用作流控通道。可移除销292应由疏水材料制成,使得水凝胶不会粘附到可移除销292上。大多数氟化的聚合物(PFA、PTFE等)将适用于这种应用。
图20A-20D示出了在组织隔室的侧面314处具有宽平坦通道312的水凝胶隔室310。隔室312的侧面314允许培养基跨组织隔室的侧面流动。
将凝胶通过端口325插入到含有可移除支撑结构322,如
用超弹性材料背衬330进行的
D.使用襟翼或悬滴进行水凝胶安装
可以使用用于产生可密封流控通道,如旋转襟翼机构,的方法将水凝胶安装到隔室中,如图21A-21C所示。襟翼340悬挂下来,从而在凝胶安装时产生密封。在凝胶342聚合后,襟翼340围绕轴342旋转以使凝胶通道的侧面暴露。襟翼可以由疏水材料和/或弹性体制成,以在凝胶安装期间产生密封。用于细胞培养的优选材料是氟聚合物,包含PTFE和PFA。
使用可溶解隔室的凝胶安装在图22A-22D中示出。可溶解材料如用于凝胶安装的可填充容器350起作用(图22A)。凝胶进入到隔室352中并聚合(图22B)。多个隔室允许多种凝胶类型。隔室溶解到培养基中(图22C)。在隔室溶解后,凝胶膨胀以填充容器350,以使流体流进入和离开凝胶(图22C、22D)。
水凝胶安装方法可以使用膨胀成密封形状的悬挂水凝胶滴。在弯月面固定技术中,仍可能需要使用
使用槽形状的悬滴轮廓的水凝胶装置在图23A-23E中示出。此方法允许所描述的多种流模式。悬滴可以扩展,直到滴压靠装置中的另一个特征,以产生密封。
图23A-23E是通过表面张力保持在位的槽形状的悬滴水凝胶的横截面示意图(图23A)、顶部视图和侧面视图(图23B),其中凝胶膨胀以将培养基通道分离为两个通道(图23C);以及所产生的流构型:跨顶部(图23D)、滴下方(图23E)、沿滴的长度(图23F)以及沿侧面(图23G、23H)。
如图23A所示,凝胶360通过端口362安装,在所述端口中水凝胶滴364由于表面张力而悬挂在位。这可以跨一定宽度沿展,以形成如图23B所示的长悬滴366或者以呈单个滴的形式。图23C示出了悬滴366的俯视图,并且图23D示出了悬滴366的侧视图。
图23E示出了水凝胶滴368可以如何膨胀以密封培养基通道370a、370b的两个区之间的连接。图23F示出了跨悬滴368的顶部可以具有连续流372,并且在悬滴368的底部下方可以具有受阻的流374。图23G从侧面示出了跨顶部的流通道372和沿底部的流通道374。图23H示出了装置376内的水凝胶366和流通道372和374。
V.用于高通量微流控实验的系统
A.与多个微流控芯片连接的电气动控制歧管
大多数微流控平台被设计成一次一个芯片进行操作。这需要大量的基础设施和管道来一次控制多个芯片。便于易于获取多个芯片的系统允许更稳健的实验设计,并且打开了运行重复和控制的能力。
歧管通过使用塔或旋转木马来保持芯片的正常重力对齐。如果芯片以不同的方式定向,则可能的是芯片将无法正常起作用或可能发生泄漏。
可以利用用于连接和控制许多微流控芯片的集成电气动歧管。与将气动管线连接到一次一个芯片的芯片相反,可以将多个芯片连接到同一气动歧管。这限制了在重复和控制条件下运行实验所需的控制器、压力源和其它组件的量。
如图24A-24D所示,微流控芯片(图24A)被插入到电气动歧管190、200中,以用于竖直地192(图24B)或在旋转机构200上(图24C、图24D)堆叠微流控装置192。竖直歧管190、200保留每个微流控装置192的理想重力朝向,并且特征在于与气动装置的快速连接。竖直塔200(图24C)的特征可以在于用于允许装置获取的旋转机构,而微流控装置192仍然连接到气动装置。还可以实施旋转木马202(图24D),其中微流控装置192围绕控制单元198径向连接。控制单元周围的位置允许装置操控和/或成像。
可以将快速连接器并入到设计中,使得可以容易地添加或移除芯片。旋转平台也可以与成像系统集成在一起,使得芯片可以自主地进行成像和分析。
图25A-25F示出了用于将微流控装置固定在歧管中的示例性快速连接装置。
B.具有用于增强组装的微芯片装置
微芯片装置需要用于流体流动的通道、可渗透膜、到用于流体摄入和流出的通道的连接器以及用于细胞培养的构型。
重要的是,膜在芯片内键合,使得其不会泄漏,在处理期间变得分离,并且膜可靠地键合,并允许气体在键合过程期间逸出。
在一优选实施例中,与在标准显微镜载玻片(玻璃,25.5x 75.5mm)上进行图案化的现有技术装置不同,这些芯片是25mm宽乘40mm长(插入物范围、测量的比率和纵横),并且在角上是圆形的(倒棱的)(图26A)。这种形状有利于在歧管中对齐,并且使键合的膜对于意外移位更具耐性。装置的厚度为2-3mm,其含有五层。这种芯片的大小和形状很重要,因为长度和宽度的纵横比减小使得芯片对键合平面的平整度和跳动度不太敏感。芯片的两个键合的半部之间的问题或并行度与减小的纵横比不太相关。
图26A示出了在中间具有集成的E-140膜的25x 40x 2mm芯片的实例。
图26B描绘了图26A芯片中允许气体在键合期间逸出的排气系统。芯片格式还包含小平坦表面,以提高键合过程的可靠性,并消除键合过程中捕获的气泡和颗粒的存在。在所施加的应力的加热条件下,键合的芯片仍然很牢固并且不太可能分层。
此外,小的键合区域在芯片的中心产生开放的气体袋。这些袋中的气体可以使用小排气特征通过芯片的边缘逸出。在没有这些排气口的情况下,内部的气体可能使压力堆积并且使芯片分层。
图26C是示出5层芯片上的排气口的CAD模型。图26D-27E是示出芯片上的保护边缘的透视图。芯片具有凸起的边缘,所述边缘保护顶部和底部上的光学薄膜:在没有这些边缘的情况下,薄膜在其碰到物体时可能升高,并且使光学薄膜分层。因此芯片的角上具有无保护边缘。
- 一种微流控芯片、微流控检测装置及微流控检测方法
- 一种微流控芯片细胞培养控制装置与方法
- 微流控装置和微流控方法
- 一种用于生物分子检测的微流控芯片及微流控装置
- 微流控基板及其驱动方法和微流控装置
- 一种基于微流控芯片细胞培养的快速控温装置
- 含有试剂的筒、包括该筒的微流控装置、制造该微流控装置的方法以及利用该微流控装置的生物化学分析方法