一种桥梁监测系统用的目标追踪方法及系统
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及数据处理技术领域,具体涉及一种桥梁监测系统用的目标追踪方法及系统。
背景技术
作为交通系统的组成部分,桥梁在人类文明的发展和演化中起到了重要作用。随现代科技的发展以及运输需求的不断增长,大型桥梁(如跨海大桥、大跨度桥梁等)越来越多的出现在人们的视野中,这些桥梁造价动辄几亿甚至几十亿元,在交通、军事和社会生活等方面有着重要的战略意义。
然而,桥梁在建造和使用过程中,由于受到环境、有害物质的侵蚀,车辆、风、地震、疲劳、人为因素等作用,以及材料自身性能的不断退化,导致结构各部分在远没有达到设计年限前就产生不同程度的损伤和劣化。这些损伤如果不能及时得到检测和维修轻则影响行车安全和缩短桥梁使用寿命,重则导致桥梁突然破坏和倒塌。而如今在现有技术中缺乏对桥梁缺陷的监测追踪管控,导致桥梁安全性低的技术问题。
发明内容
本申请提供了一种桥梁监测系统用的目标追踪方法及系统,用于针对解决现有技术中存在的缺乏对桥梁缺陷的管控,导致桥梁安全性低的技术问题。
鉴于上述问题,本申请提供了一种桥梁监测系统用的目标追踪方法及系统。
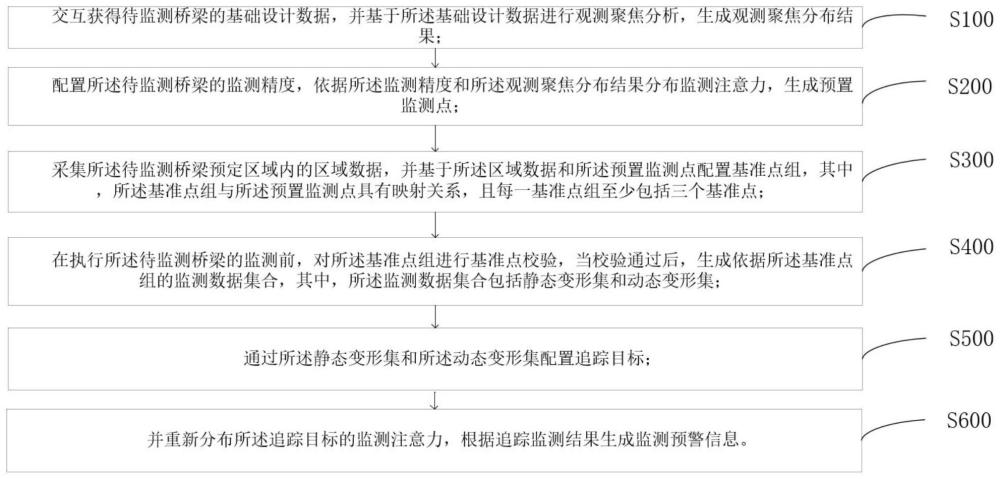
第一方面,本申请提供了一种桥梁监测系统用的目标追踪方法,所述方法包括:交互获得待监测桥梁的基础设计数据,并基于所述基础设计数据进行观测聚焦分析,生成观测聚焦分布结果;配置所述待监测桥梁的监测精度,依据所述监测精度和所述观测聚焦分布结果分布监测注意力,生成预置监测点;采集所述待监测桥梁预定区域内的区域数据,并基于所述区域数据和所述预置监测点配置基准点组,其中,所述基准点组与所述预置监测点具有映射关系,且每一基准点组至少包括三个基准点;在执行所述待监测桥梁的监测前,对所述基准点组进行基准点校验,当校验通过后,生成依据所述基准点组的监测数据集合,其中,所述监测数据集合包括静态变形集和动态变形集;通过所述静态变形集和所述动态变形集配置追踪目标;并重新分布所述追踪目标的监测注意力,根据追踪监测结果生成监测预警信息。
第二方面,本申请提供了一种桥梁监测系统用的目标追踪系统,所述系统包括:观测聚焦分析模块,所述观测聚焦分析模块用于交互获得待监测桥梁的基础设计数据,并基于所述基础设计数据进行观测聚焦分析,生成观测聚焦分布结果;监测模块,所述监测模块用于配置所述待监测桥梁的监测精度,依据所述监测精度和所述观测聚焦分布结果分布监测注意力,生成预置监测点;数据采集模块,所述数据采集模块用于采集所述待监测桥梁预定区域内的区域数据,并基于所述区域数据和所述预置监测点配置基准点组,其中,所述基准点组与所述预置监测点具有映射关系,且每一基准点组至少包括三个基准点;基准点校验模块,所述基准点校验模块用于在执行所述待监测桥梁的监测前,对所述基准点组进行基准点校验,当校验通过后,生成依据所述基准点组的监测数据集合,其中,所述监测数据集合包括静态变形集和动态变形集;目标配置模块,所述目标配置模块用于通过所述静态变形集和所述动态变形集配置追踪目标;监测注意力模块,所述监测注意力模块用于并重新分布所述追踪目标的监测注意力,根据追踪监测结果生成监测预警信息。
本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
本申请提供的一种桥梁监测系统用的目标追踪方法及系统,涉及数据处理技术领域,解决了现有技术中缺乏对桥梁缺陷的管控,导致桥梁安全性低的技术问题,实现了对桥梁缺陷的精准定位追踪管控,提高桥梁安全性低。
附图说明
图1为本申请提供了一种桥梁监测系统用的目标追踪方法流程示意图;
图2为本申请提供了一种桥梁监测系统用的目标追踪方法中获得关联偏离结果流程示意图;
图3为本申请提供了一种桥梁监测系统用的目标追踪方法中进行待监测桥梁的预警管理流程示意图;
图4为本申请提供了一种桥梁监测系统用的目标追踪方法中进行待监测桥梁的监测管理流程示意图;
图5为本申请提供了一种桥梁监测系统用的目标追踪系统结构示意图。
附图标记说明:观测聚焦分析模块1,监测模块2,数据采集模块3,基准点校验模块4,目标配置模块5,监测注意力模块6。
具体实施方式
本申请通过提供一种桥梁监测系统用的目标追踪方法及系统,用于解决现有技术中缺乏对桥梁缺陷的管控,导致桥梁安全性低的技术问题。
实施例一
如图1所示,本申请实施例提供了一种桥梁监测系统用的目标追踪方法,该方法包括:
步骤S100:交互获得待监测桥梁的基础设计数据,并基于所述基础设计数据进行观测聚焦分析,生成观测聚焦分布结果;
具体而言,本申请实施例提供的一种桥梁监测系统用的目标追踪方法应用于一种桥梁监测系统用的目标追踪系统,为保证后期对桥梁的目标缺陷进行精准追踪,因此首先需要通过系统与目标待监测桥梁的基础设计数据进行数据交互,目标待监测桥梁的基础设计数据可以包含桥墩高度数据、墩低顺桥向宽数据、横桥向数据、跨度数据等,通过将目标待监测桥梁的基础设计数据传输至系统中,并同时基于基础设计数据进行待监测桥梁的3D模拟分析,将分析结果作为桥梁观测模板图,在对桥梁观测模板图进行观测的过程中,遍历桥梁观测的像素块,将清晰度大于80%的像素块作为观测聚焦分布点,最终将观测聚焦分布点作为待监测桥梁的观测聚焦分布结果进行输出,为后期实现基于桥梁监测系统所进行的目标追踪作为重要参考依据。
步骤S200:配置所述待监测桥梁的监测精度,依据所述监测精度和所述观测聚焦分布结果分布监测注意力,生成预置监测点;
具体而言,为提高桥梁监测系统的监测精准度,因此需要对目标待监测桥梁进行监测精度的配置,是指根据目标待监测桥梁的基础设计数据对监测精度值进行确定,其监测数据可以包含单点定位精度、RTK定位精度等,其单点定位精度可以设为小于1.5m,RTK定位精度可以将水平精度设为正负2.5mm,初值精度设为正负2.5mm,进一步的,在所设定的监测精度以及上述所获观测聚焦分布结果对待监测桥梁进行分布监测注意力,所分布的监测注意力机制是指将视觉注意力集中在图像的不同区域,该注意力机制是在机器学习模型中所嵌入的一种特殊结构,用来自动学习和计算监测精度和观测聚焦分布结果对监测点位数据贡献大小,将数据贡献大的监测点位记作预置监测点,进而为实现基于桥梁监测系统所进行的目标追踪做保障。
步骤S300:采集所述待监测桥梁预定区域内的区域数据,并基于所述区域数据和所述预置监测点配置基准点组,其中,所述基准点组与所述预置监测点具有映射关系,且每一基准点组至少包括三个基准点;
具体而言,为了在待监测桥梁的不同区域中将阈值监测点进行组别划分,因此首先需要对待监测桥梁根据基础设计数据进行区域划分,将所划分完成的区域作为预定区域同时对该区域中所包含的待监测桥梁的区域数据进行提取,在不同预定区域中所提取的区域数据均包含当前区域内的区域特征,进一步的,以所采集的区域数据以及预设监测点对待监测桥梁的基准点组进行配置,且基准点组与所述预置监测点具有映射关系,是指在预置监测点内取一值,基准点组内有且只有一个值对应,而在基准点组内取一值,预置监测点则可以有多个值对应,且在每一基准点组内至少包括三个基准点,即预置监测点,为后续实现基于桥梁监测系统所进行的目标追踪夯实基础。
步骤S400:在执行所述待监测桥梁的监测前,对所述基准点组进行基准点校验,当校验通过后,生成依据所述基准点组的监测数据集合,其中,所述监测数据集合包括静态变形集和动态变形集;
进一步而言,如图2所示,本申请步骤S400还包括:
步骤S410:以所述基准点组内的任意一基准点作为标定基准点,对当前基准点组内的其他基准点进行偏离认证;
步骤S420:将所述基准点组内的全部基准点均遍历为标准基准点,整合获得偏离认证集合;
步骤S430:定位基准点组的关联基准点组,并通过所述关联基准点组进行基准点组的关联认证,获得关联偏离结果;
步骤S440:通过所述偏离认证集合和所述关联偏离结果进行基准点校验。
进一步而言,本申请步骤S400还包括:
步骤S450:交互所述待监测桥梁的桥梁通行数据,并同步确定天气环境数据;
步骤S460:设定监测数据交互窗口,在所述监测数据交互窗口内,依据所述桥梁通行数据和所述天气环境数据进行监测传感器数据交互,获得数据交互结果;
步骤S470:通过所述数据交互结果进行所述待监测桥梁的沉降和形变评价;
步骤S480:基于沉降和形变评价结果生成所述静态变形集。
进一步而言,本申请步骤S400还包括:
步骤S490:根据所述桥梁通行数据定位动态车辆;
步骤S4100:通过测速装置执行所述动态车辆的速度测量,记录速度数据;
步骤S4110:基于测重传感器执行所述动态车辆的重量测定,并根据重量测定结果和所述速度数据执行重量线性拟合,生成重量数据;
步骤S4120:对所述动态车辆通过所述待监测桥梁期间执行动态形变监测,生成动态形变监测结果;
步骤S4130:将所述速度数据、所述重量数据与所述动态形变数据进行映射标识,根据映射标识结果生成动态变形集。
具体而言,在对待监测桥梁执行监测前,对基准点组进行基准点校验,是指以基准点组内的任意选取的一个基准点作为标定基准点,从而该标定基准点所属的基准点组的其他基准点进行偏离认证,即对当前基准点组内除过标定基准点外的所包含的基准点依次与标定基准点进行比对,将与标定基准点比对误差大于30%的基准点认证为偏离基准点,进一步的,将基准点组内的全部基准点均遍历为标准基准点,并将具有偏离认证的基准点进行整合后记作偏离认证集合,同时对基准点组中的关联基准点进行定位,关联基准点是指在基准点组中的一个基准点至少存在一个或一个以上的基准点与之对应,即随着基准点的变化而变化,并将基准点组中所定位的所有关联基准点进行汇总记作关联基准点组,并通过关联基准点组进行对基准点组内的基准点之间的关联度进行关联认证,是以关联基准点组作为标准数据,将基准点组中所包含的基准点之间的关联度与关联基准点组中所包含的关联基准点之间的关联度进行比对,当基准点组内存在基准点之间的关联度比对误差大于20%时,则将其进行提取后记作关联偏离结果,最终以偏离认证集合和关联偏离结果对基准点组内的基准点进行基准点校验,当偏离认证集合和关联偏离结果的误差率均值小于10%时,则视为校验通过,当基准点校验通过后,将最终通过的基准点作为基准点组的监测数据集合,其中,监测数据集合包括静态变形集和动态变形集
监测数据集合中的静态变形集是首先通过与待监测桥梁的桥梁通行数据进行数据交互,在对桥梁通行数据进行交互时,不仅对桥梁位置以及桥梁内进行动态监测,还需要对待监测桥梁周围一固定范围内的数据进行提前监测,并对待监测桥梁周围的天气环境数据进行同步确定,为保证对待监测桥梁监测数据交互的实时性,则需要对监测数据交互窗口进行设定,该监测数据交互窗口是用于对待监测桥梁的通行数据与天气环境数据进行采集并进行数据交互的窗口,同时依据桥梁通行数据和天气环境数据进行监测传感器数据交互,获得数据交互结果,为了保证对待监测桥梁进行监测的外界影响降到最小,则可以在进行监测传感器数据交互的过程中可以是在待监测桥梁上车辆通行数量少且天气环境为优的时候对其进行数据监测,进一步的,通过数据交互结果对待监测桥梁的沉降和形变进行评价,是指将数据交互结果中待监测桥梁的实体深基础的下降幅度以及桥梁结果的形状变化进行评价,其监测桥梁的实体深基础的下降幅度以及桥梁结果的形状变化与评价结果为反比关系,若监测桥梁的实体深基础的下降幅度大以及桥梁结果的形状变化大则沉降和形变评价就低,最终由沉降和形变评价结果生成待监测桥梁的静态变形集。
监测数据集合中的动态变形集是根据桥梁通行数据对待监测桥梁上所存在的动态车辆进行实时定位,进一步的,通过待监测桥梁上所布设的测速装置对在桥梁内的动态车辆执行速度测量,是指根据单位时间内动态车辆的实时定位对动态车辆的速度进行获取,并对每个动态车辆的速度数据进行记录,进一步的,通过待监测桥梁上所布设的测重传感器对动态车辆执行重量测定,同时根据重量测定结果和速度数据执行重量线性拟合,是指设重量测定结果和速度数据都是被观测的量,且y是重量测定结果的函数:y=f(x;b),其中x为重量测定结果,y为速度数据,曲线拟合就是通过重量测定结果,速度数据的观测值来寻求参数b的最佳估计值,及寻求最佳的理论曲线y=f(x;b)。当函数y=f(x;b)为关于b的i线性函数时,完成重量线性拟合,从而对重量数据进行生成,进一步的,对动态车辆通过待监测桥梁期间执行待监测桥梁的动态形变监测,是指监测待监测桥梁在通行数据中动态车辆进行的外力作用下使得待监测桥梁发生的形状或体积的变化,将变化数据进行整合后记作动态形变监测结果,最终将速度数据、重量数据与动态形变数据进行映射标识,重量线性拟合数据中所包含的速度数据以及重量数据中选取一值,动态形变数据有且只有一个值对应,而动态形变数据取一值,重量线性拟合数据中所包含的速度数据以及重量数据中可以有多个值对应,在此基础上获取速度数据、重量数据与动态形变数据之间的映射标识,并根据映射标识结果生成待监测桥梁的动态变形集,实现基于桥梁监测系统所进行的目标追踪的作用。
步骤S500:通过所述静态变形集和所述动态变形集配置追踪目标;
具体而言,以上述所获目标待监测桥梁的静态变形集以及动态变形集作为标准数据,对静态变形集中所包含目标待监测桥梁在静态环境下所产生的沉降数据和形变数据进行提取,根据所提取的沉降数据以及形变数据对目标待监测桥梁所出现的变形作为第一追踪目标,对动态变形集中所包含目标待监测桥梁在动态环境下所产生的速度数据、重量数据与动态形变数据进行提取,根据所提取的速度数据、重量数据与动态形变数据对目标待监测桥梁所出现的变形作为第二追踪目标,最终根据第一追踪目标与第二追踪目标对目标待监测桥梁进行追踪目标的配置,以便为后期基于桥梁监测系统所进行的目标追踪时作为参照数据。
步骤S600:并重新分布所述追踪目标的监测注意力,根据追踪监测结果生成监测预警信息。
进一步而言,如图3所示,本申请步骤S600还包括:
步骤S610:对所述新增追踪目标和所述追踪目标进行位置关联分析,确定关联系数;
步骤S620:依据所述关联系数对所述新增追踪目标和所述追踪目标的关联预警评价;
步骤S630:依据关联预警评价结果进行所述待监测桥梁的预警管理。
具体而言,为保证对目标待监测桥梁追踪目标的准确性,因此需要对追踪目标的监测注意力进行重新分布,首先对新增追踪目标和追踪目标进行位置关联分析,是指描述新增追踪目标和追踪目标同时出现的规律和模式的频率,由此对关联系数进行确定,进一步的,依据关联系数对新增追踪目标和追踪目标进行关联预警评价,是指新增追踪目标和追踪目标的关联系数越高,则目标待监测的桥梁安全性越低,进一步的,依据关联预警评价结果对待监测桥梁进行预警管理,其关联关系越高则关联预警评价结果越低,其预警级别就越高,提高后期实现基于桥梁监测系统所进行的目标追踪的准确率。
进一步而言,如图4所示,本申请步骤S600还包括:
步骤S640:根据所述基础设计数据配置无人机监测的遍历路径,并通过所述遍历路径执行所述待监测桥梁的图像数据采集,构建带有位置坐标关联的图像集合;
步骤S650:对所述图像集合进行裂缝特征匹配,获得带有位置坐标关联的裂缝特征集合;
步骤S660:根据所述裂缝特征集合生成新增追踪目标,基于所述新增追踪目标进行所述待监测桥梁的监测管理。
进一步而言,本申请步骤S630包括:
步骤S661:调用所述裂缝特征集合对应的位置坐标,并对所述位置坐标执行传感器的附加数据采集;
步骤S662:记录附加数据采集结果,并通过所述附加数据采集结果对所述裂缝特征集合执行特征补偿;
步骤S663:根据特征补偿结果重新生成新增追踪目标。
具体而言,为保证对目标监测桥梁进行检测预警的准确性,则可以通过无人机对目标监测桥梁进行扫描检测,根据目标监测桥梁的基础设计数据对无人机监测的遍历路径进行配置,是指基于桥梁的结构设计数据对桥梁承重部分进行重点排查,从而将每个排查点位进行连接后记作遍历路径,并通过遍历路径待监测桥梁执行图像数据采集,再通过所采集的图像数据对带有位置坐标关联的图像集合进行构建,将图像集合与大数据中所包含的桥梁裂缝特征进行吻合匹配,将裂缝吻合的图像进行位置坐标的提取,并将所提取的图像进行整合后记作具有位置坐标关联的裂缝特征集合,进一步的,根据裂缝特征集合对新增追踪目标进行生成,是指首先对裂缝特征集合对应的位置坐标进行调用,并对位置坐标执行传感器的附加数据采集,是指基于位置坐标对用于测定桥梁安全性的传感器进行相应布设,再将所布设的传感器采集到的数据作为附加数据集,同时对所采集到的附加数据采集结果进行记录,最终通过传感器所采集到的附加数据采集结果对裂缝特征集合执行特征补偿,使得所采集到目标桥梁上的裂缝特征更为精准,由所执行的特征补偿结果重新对新增追踪目标进行生成,同时以新增追踪目标作为待监测桥梁的目标数据进行待监测桥梁的监测管理,达到为后期实现新增追踪目标进行目标追踪提供重要依据的技术效果。
综上所述,本申请实施例提供的一种桥梁监测系统用的目标追踪方法,至少包括如下技术效果,实现了对桥梁缺陷的精准定位追踪管控,提高桥梁安全性低。
实施例二
基于与前述实施例中一种桥梁监测系统用的目标追踪方法相同的发明构思,如图5所示,本申请提供了一种桥梁监测系统用的目标追踪系统,系统包括:
观测聚焦分析模块1,所述观测聚焦分析模块1用于交互获得待监测桥梁的基础设计数据,并基于所述基础设计数据进行观测聚焦分析,生成观测聚焦分布结果;
监测模块2,所述监测模块2用于配置所述待监测桥梁的监测精度,依据所述监测精度和所述观测聚焦分布结果分布监测注意力,生成预置监测点;
数据采集模块3,所述数据采集模块3用于采集所述待监测桥梁预定区域内的区域数据,并基于所述区域数据和所述预置监测点配置基准点组,其中,所述基准点组与所述预置监测点具有映射关系,且每一基准点组至少包括三个基准点;
基准点校验模块4,所述基准点校验模块4用于在执行所述待监测桥梁的监测前,对所述基准点组进行基准点校验,当校验通过后,生成依据所述基准点组的监测数据集合,其中,所述监测数据集合包括静态变形集和动态变形集;
目标配置模块5,所述目标配置模块5用于通过所述静态变形集和所述动态变形集配置追踪目标;
监测注意力模块6,所述监测注意力模块6用于并重新分布所述追踪目标的监测注意力,根据追踪监测结果生成监测预警信息。
进一步而言,系统还包括:
偏离认证模块,所述偏离认证模块用于以所述基准点组内的任意一基准点作为标定基准点,对当前基准点组内的其他基准点进行偏离认证;
遍历模块,所述遍历模块用于将所述基准点组内的全部基准点均遍历为标准基准点,整合获得偏离认证集合;
关联认证模块,所述关联认证模块用于定位基准点组的关联基准点组,并通过所述关联基准点组进行基准点组的关联认证,获得关联偏离结果;
校验模块,所述校验模块用于通过所述偏离认证集合和所述关联偏离结果进行基准点校验。
进一步而言,系统还包括:
第一数据交互模块,所述第一数据交互模块用于交互所述待监测桥梁的桥梁通行数据,并同步确定天气环境数据;
第二数据交互模块,所述第二数据交互模块用于设定监测数据交互窗口,在所述监测数据交互窗口内,依据所述桥梁通行数据和所述天气环境数据进行监测传感器数据交互,获得数据交互结果;
第三数据交互模块,所述第三数据交互模块用于通过所述数据交互结果进行所述待监测桥梁的沉降和形变评价;
第一变形模块,所述第一变形模块用于基于沉降和形变评价结果生成所述静态变形集。
进一步而言,系统还包括:
定位模块,所述定位模块用于根据所述桥梁通行数据定位动态车辆;
速度测量模块,所述速度测量模块用于通过测速装置执行所述动态车辆的速度测量,记录速度数据;
重量线性拟合模块,所述重量线性拟合模块用于基于测重传感器执行所述动态车辆的重量测定,并根据重量测定结果和所述速度数据执行重量线性拟合,生成重量数据;
形变监测模块,所述形变监测模块用于对所述动态车辆通过所述待监测桥梁期间执行动态形变监测,生成动态形变监测结果;
第二变形模块,所述第二变形模块用于将所述速度数据、所述重量数据与所述动态形变数据进行映射标识,根据映射标识结果生成动态变形集。
进一步而言,系统还包括:
集合构建模块,所述集合构建模块用于根据所述基础设计数据配置无人机监测的遍历路径,并通过所述遍历路径执行所述待监测桥梁的图像数据采集,构建带有位置坐标关联的图像集合;
特征匹配模块,所述特征匹配模块用于对所述图像集合进行裂缝特征匹配,获得带有位置坐标关联的裂缝特征集合;
第一新增模块,所述第一新增模块用于根据所述裂缝特征集合生成新增追踪目标,基于所述新增追踪目标进行所述待监测桥梁的监测管理。
进一步而言,系统还包括:
位置坐标模块,所述位置坐标模块用于调用所述裂缝特征集合对应的位置坐标,并对所述位置坐标执行传感器的附加数据采集;
特征补偿模块,所述特征补偿模块用于记录附加数据采集结果,并通过所述附加数据采集结果对所述裂缝特征集合执行特征补偿;
第二新增模块,所述第二新增模块用于根据特征补偿结果重新生成新增追踪目标。
进一步而言,系统还包括:
关联分析模块,所述关联分析模块用于对所述新增追踪目标和所述追踪目标进行位置关联分析,确定关联系数;
关联预警模块,所述关联预警模块用于依据所述关联系数对所述新增追踪目标和所述追踪目标的关联预警评价;
预警管理模块,所述预警管理模块用于依据关联预警评价结果进行所述待监测桥梁的预警管理。
本说明书通过前述对一种桥梁监测系统用的目标追踪方法的详细描述,本领域技术人员可以清楚的知道本实施例中一种桥梁监测系统用的目标追踪系统,对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本申请。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本申请的精神或范围的情况下,在其它实施例中实现。因此,本申请将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种目标监测方法、装置及系统
- 一种基于mems传感器的综合桥梁监测系统及桥梁结构
- 一种监测准确的桥梁监测系统
- 一种目标追踪方法和目标追踪系统
- 一种目标追踪方法和目标追踪系统