一种自助饮药机
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及自动贩卖设备领域,特别是一种自助饮药机。
背景技术
饮药机是按照使用者需求自动将存储的药水灌注到杯体上,便于使用者饮用的机器。但目前部分饮药机自动化和智能化程度低,仍需要人力协助操作。
发明内容
本发明的目的在于至少解决现有技术中存在的技术问题之一,提供一种自助饮药机。
本发明解决其问题所采用的技术方案是:
一种自助饮药机,包括:
存储有多个杯体的落杯装置,所述落杯装置用于从多个所述杯体分离出单个所述杯体;
注药装置,所述注药装置用于往所述杯体注药;
弃杯容纳器,所述弃杯容纳器用于容纳弃置的所述杯体;以及
载杯装置,所述载杯装置包括传输机构、杯架和旋转机构,所述杯架设置在所述传输机构上,所述旋转机构的输出端与所述传输结构连接并驱动所述传输机构整体翻转,所述传输机构驱动所述杯架在第一止点位置、第二止点位置和第三止点位置间往复运动,所述落杯装置位于所述第一止点位置的上方,所述注药装置的出药口位于所述第二止点位置的上方,所述弃杯容纳器位于所述第三止点位置的下方。
进一步,所述落杯装置包括:
杯存储器,所述杯存储器存储有叠合的多个杯体,所述杯存储器的下方设有出杯口;
卡板,所述卡板位于所述出杯口的下方,所述卡板包括相隔的上板层和下板层,所述上板层设有第一落杯孔,所述下板层设有第二落杯孔,所述第一落杯孔包括能卡住所述杯体的第一孔部和能供所述杯体通过的第二孔部,所述第一孔部与所述第二孔部相通,所述第二落杯孔包括能供所述杯体通过的第三孔部和能卡住所述杯体的第四孔部,所述第三孔部与所述第四孔部相通,所述第三孔部正对于所述第一孔部,所述第四孔部正对于所述第二孔部;以及
驱动结构,所述驱动结构驱动所述卡板在所述第一孔部与所述第二孔部间的方向上往复运动。
进一步,所述杯体在杯口围有往外凸出的杯沿;所述第一孔部比所述杯体的杯身的最大外半径大且比所述杯沿外半径小,所述第二孔部比所述杯沿外半径大;所述第三孔部比所述杯沿外半径大,所述第四孔部比所述杯体的杯身的最大外半径大且比所述杯沿外半径小。
进一步,所述卡板还包括用于将最下端的所述杯体推向所述第三孔部的推块,所述推块位于上板层和下板层之间。
进一步,所述驱动结构包括驱动器、连杆和滑轨;所述连杆的一端与所述驱动器的输出端连接,所述连杆的另一端与所述卡板连接;所述驱动器通过连杆驱动所述卡板沿所述滑轨往复运动。
进一步,所述载杯装置还包括支座,所述传输机构的两端通过轴承与支座连接,所述旋转机构安装在所述支座上。
进一步,所述支座的下端设有称重传感器。
进一步,所述传输机构包括横向导轨、滑动块和导轨驱动器,所述滑动块沿所述横向导轨往复运动;所述杯架设置在所述滑动块上。
进一步,所述支座安装有用于测量所述杯架运动距离的距离传感器。
进一步,所述注药装置包括药存储器、输液管、伸缩装置和漏液承载器;所述输液管的末端为所述出药口,所述漏液承载器设置在所述输液管的下方;所述伸缩装置连接在所述药存储器与所述输液管间,并驱动所述输液管伸缩。
上述自助饮药机至少具有以下有益效果:具有高度的自动化和智能化特点,通过落杯装置、注药装置、载杯装置的协作,实现落杯、送杯、注药、饮药和弃杯的自动化操作,实现智能化操作流程,无需人力协作,节约了人力成本。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
下面结合附图和实例对本发明作进一步说明。
图1是本发明一种自助饮药机的结构图;
图2是图1中的落杯装置的结构图;
图3是图2中的卡板的透视结构图;
图4是图2中的卡板的立体结构图;
图5是图4中的上板层的示意图;
图6是图4中的下板层的示意图;
图7是图1中的载杯装置的结构图;
图8是图1中的载杯装置在弃杯过程中的结构图;
图9是图1中的注药装置的结构图。
具体实施方式
本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
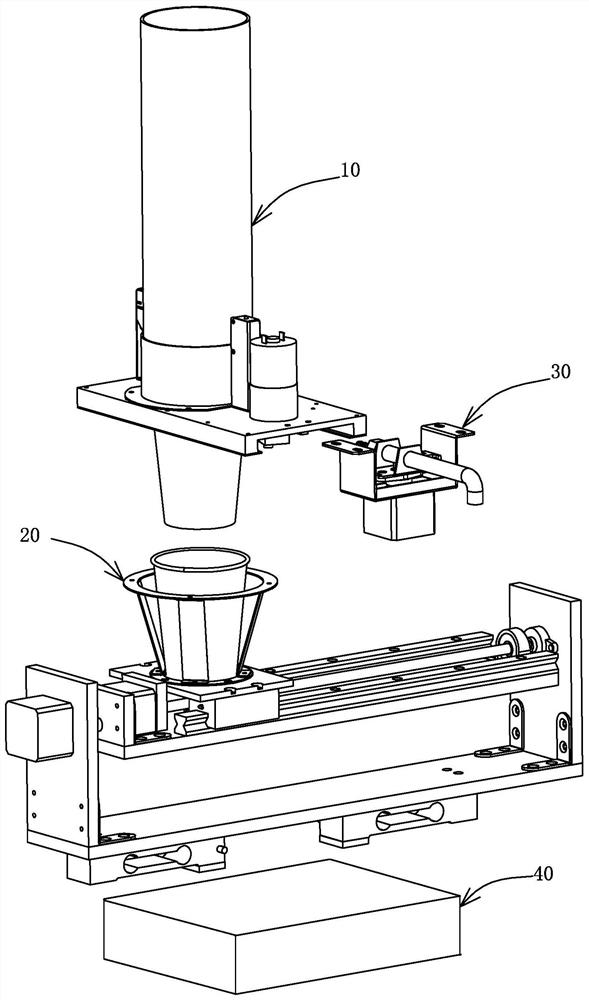
参照图1至图9,本发明实施例提供了一种自助饮药机。自助饮药机包括落杯装置10、注药装置30、载杯装置20和弃杯容纳器40。
其中,落杯装置10存储有多个杯体,落杯装置10用于从多个杯体分离出单个杯体;注药装置30用于往杯体注药;弃杯容纳器40用于容纳弃置的杯体;载杯装置20包括传输机构700、杯架900和旋转机构800,杯架900设置在传输机构700上,旋转机构800的输出端与传输机构700连接并驱动传输机构700整体翻转,传输机构700驱动杯架900在第一止点位置、第二止点位置和第三止点位置间往复运动,落杯装置10位于第一止点位置的上方,注药装置30的出药口34位于第二止点位置的上方,弃杯容纳器40位于第三止点位置的下方。
在该实施例中,当然地,该自助饮药机设有控制器,用于控制和协调各部件的动作。当使用者完成支付操作或启动开关,落杯装置10从多个杯体分离出单个杯体,使单个杯体落在载杯机构的杯架900上,此时杯架900位于第一止点位置上;传输机构700将杯架900及其上的杯体传输到第二止点位置上,即位于注药装置30的出药口34的下方,注药装置30往杯体注药。使用者将承装药的杯体从杯架900拿走,喝完后将空杯体放回杯架900,传输机构700将杯架900及其上的杯体传输至第三止点位置上,旋转机构800驱动传输机构700及其上的杯体翻转,使杯体在重力作用下掉落到弃杯容纳器40中。旋转机构800重新复位,使杯架900竖直朝上;传输机构700将杯架900传输复位至第一止点位置。
通过该自助饮药机能实现落杯、送杯、注药、饮药和弃杯的自动化操作,实现智能化操作流程,节约了人力成本。
另外该自助饮药机可以设有支付机构,实现现金付款或网上付款功能。本自助饮药机的支付机构采用现有技术的支付机构即可。
需要说明的是,在该实施例中,第一止点位置和第三止点位置重合。即弃杯容纳器40位于落杯装置10的下方,在完成弃杯动作后,旋转机构800只需重新复位至杯架900竖直朝上的位置,此时杯架900也位于第一止点位置上,无需传输机构700运动。
参照图2至图6,进一步,落杯装置10包括杯存储器100、卡板200和驱动结构300;其中,杯存储器100存储有叠合的多个杯体,杯存储器100的下方设有出杯口110;卡板200位于出杯口110的下方,卡板200包括相隔的上板层210和下板层220,上板层210设有第一落杯孔211,下板层220设有第二落杯孔221,第一落杯孔211包括能卡住杯体的第一孔部212和能供杯体通过的第二孔部213,第一孔部212与第二孔部213相通,第二落杯孔221包括能供杯体通过的第三孔部222和能卡住杯体的第四孔部223,第三孔部222与第四孔部223相通,第三孔部222正对于第一孔部212,第四孔部223正对于第二孔部213;以及驱动结构300驱动卡板200在第一孔部212与第二孔部213间的方向上往复运动。
在该实施例中,当卡板200位于初始位置时,第一孔部212卡住最下端的杯体,此时第一孔部212正对于出杯口110;驱动结构300驱动卡板200运动至第二孔部213正对于出杯口110的位置,此时最下端的杯体因重力作用从第二孔部213落下被第四孔部223卡住,由于上板层210和下板层220相隔的具体距离等于叠放的多个杯体组成的杯组的一格距离,则整个杯组下降一格;驱动结构300再次驱动卡板200复位,使卡板200运动回初始位置,使第一孔部212正对于出杯口110,此时最下端的杯体从第三孔部222落下,原第二最下端被第一孔部212卡住并成为现最下端杯体。此为从叠放的多个杯体组成的杯组分离出单个杯体的落杯过程。重复上述过程能将多个杯体逐一分离。该落杯装置10结构简单,降低生产成本和维护成本,实现自动化落杯,无需人工处理,提高落杯效率。
参照图3至图6,进一步,杯体在杯口围有往外凸出的杯沿,杯沿外半径比杯身的最大外半径大;第一孔部212比杯体的杯身的最大外半径大且比杯沿外半径小,第四孔部223比杯体的杯身的最大外半径大且比杯沿外半径小,第一孔部212和第四孔部223均能通过卡住杯沿进而卡住杯体。第二孔部213比杯沿外半径大,第三孔部222比杯沿外半径大,第二孔部213和第三孔部222能使杯体通过。另外,第一落杯孔211和第二落杯孔221均呈梨状。另外,第一孔部212和第四孔部223形状相同,第二孔部213和第三孔部222形状相同。则第一落杯孔211和第二落杯孔221形状相同,上板层210和下板层220能由同一工艺流程制成。
参照图4,进一步,卡板200还包括用于将最下端的杯体推向第三孔部222的推块230,推块230位于上板层210和下板层220之间。具体地,推块230位于第三孔部222的外侧,且部分推块230位于第二孔部213与第三孔部222重叠位置。在驱动结构300再次驱动卡板200复位,使卡板200运动回初始位置时,推块230将最下端杯体从第四孔部223挤向第三孔部222。另外,推块230的末端设有倾斜的导向面。导向面更有利于推块230推挤杯体。
参照图2,进一步,驱动结构300包括驱动器310、连杆320和滑轨330;连杆320的一端与驱动器310的输出端连接,连杆320的另一端与卡板200连接;驱动器310通过连杆320驱动卡板200沿滑轨330往复运动。在该实施例中,驱动器310采用电机,驱动器310的输出端旋转,通过连杆320和滑轨330330的作用,将旋转运动转化为直线运动,使卡板200能沿滑轨330往复运动进而实现将多个杯体组成的杯组逐一分离的功能。
另外,驱动结构300还包括用于检测卡板200是否复位到位的位置传感器500。位置传感器500采用光电传感器,位置传感器500射出的光朝向卡板200,测量射出端与卡板200的距离,根据距离判断卡板200是否复位到位,确保卡板200往复运动的止点位置正确以使每个杯体能正常分离。落杯装置10设置有用于检测杯存储器100存储的杯体高度的高度传感器400。高度传感器400同样采用光电传感器,射出的光朝向杯体且平行于杯口,检测与杯体的距离。当叠放的杯体高度低于高度传感器400的位置,检测的距离值变大从而说明杯存储器100的数量过少需要补充杯体。
参照图7和图8,进一步,载杯装置20还包括支座600,传输机构700的两端通过轴承与支座600连接,旋转机构800安装在支座600上。
进一步,支座600的下端设有称重传感器610。称重传感器610对整个支座600称重,并向控制器发送重量值信号。具体地,称重传感器610500采用QS/QS-A型号。
在该实施例中,在该实施例中,杯体落在杯架900上,杯架900承载杯体,控制器根据称重传感器610发送的重量值信号得到支座600上增加了空杯体的重量,则控制传输机构700将承载杯体的杯架900传输至输液管31的出料口下方。输液管31传输饮料,并将杯体注满饮料。当使用者将饮料喝完后,将空杯体放回杯架900。控制器根据称重传感器610发送的重量值信号得到支座600上增加了空杯体的重量,则控制传输机构700将空杯体传输至装杯桶的上方。控制器控制旋转机构800将传输机构700及其上的杯架900翻转,使空杯体在重力的作用下掉落在装杯桶中;控制器根据称重传感器610发送的重量值信号等于原重量,则控制旋转机构800将传输机构700及其上的杯架900翻转复位。
进一步,传输机构700包括横向导轨720、滑动块710和导轨驱动器730,滑动块710沿横向导轨720往复运动;杯架900设置在滑动块710上。导轨驱动器730为电机,电机为横向导轨720提供能源,横向导轨720驱动滑动块710往复运动。
进一步,支座600安装有用于测量杯架900运动距离的距离传感器620。具体地,距离传感器620采用光电传感器。通过距离传感器620确保杯架900准确到达第一止点位置、第二止点位置和第三止点位置。
进一步,杯架900安装在滑动块710上。横向导轨720驱动滑动块710及其上的杯架900往复运动,使杯架900准确到达落杯位置、注料位置和弃杯位置。杯架900包括杯口环910和多条连接条920;每条连接条920的一端与杯口环910的下表面连接,另一端与滑动块710的上表面连接;多条连接条920围绕杯口环910设置并形成杯体容纳腔,杯体稳定地承载在杯体容纳腔中。该杯架900结构简单且重量小,能减少传输机构700传输时的能量损耗。
参照图9,进一步,注药装置30包括药存储器、输液管31、伸缩装置32和漏液承载器33;输液管31的末端为出药口34,漏液承载器33设置在输液管31的下方;伸缩装置32连接在药存储器与输液管31间,并驱动输液管31伸缩。当然注药装置30也设置有光电传感器,用于检测输液管31的伸缩位置是否到位。
在该实施例中,当注药装置30向杯体注射药水时,伸缩装置32将输液管31伸出,使出药口34离开漏液承载器33的范围,伸出至杯体上方,向杯体注药。当注药装置30注药完成后,伸缩装置32使输液管31缩回复位至漏液承载器33的上方,使未完全滴落在杯体中的沾在出药口34的药水能滴落在漏液承载器33中。
以上所述,只是本发明的较佳实施例而已,本发明并不局限于上述实施方式,只要其以相同的手段达到本发明的技术效果,都应属于本发明的保护范围。