一种轴向磁场电机与双摩擦面制动器的集成结构
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及电机技术领域,尤其涉及一种轴向磁场电机与双摩擦面制动器的集成结构。
背景技术
机械手臂的关节模组是由电机进行驱动运行,而在断电时需要制动器来保持位置不动。现有的电机和制动器是两个独立的结构,使得组装后的整体轴向尺寸较长,另外机械手臂大都是多轴的,例如四轴、六轴和七轴等,使得电机的安装空间受到限制,无法适用于上述的轴向尺寸长的组装结构。
发明内容
为了解决上述问题,本发明提供了一种轴向尺寸短,且结构紧凑的轴向磁场电机与双摩擦面制动器的集成结构。
一种轴向磁场电机与双摩擦面制动器的集成结构,包括:
转子总成,包括一背铁、一轴部和多个磁钢,所述背铁与所述轴部相连接,多个所述磁钢固定于所述背铁,且环绕于所述轴部设置;
电机定子总成,包括一定子铁芯和一定子绕组,所述定子绕组固定于所述定子铁芯上,所述定子铁芯套设于所述轴部,且位于所述限位台与所述磁钢之间,以使所述定子铁芯固定所述定子绕组一侧与所述磁钢相对设置;
制动盘,套设于所述轴部上,所述制动盘位于所述电机定子总成背离所述磁钢的一侧;
制动器定子总成,包括一壳体、一线圈、一活动板和至少一弹簧,所述弹簧连接于所述壳体和所述活动板之间,所述线圈固定于所述壳体朝向所述活动板的一侧,所述壳体固定于所述电机定子总成背离所述磁钢的一侧,以使所述制动盘能够克服所述弹簧弹力位于所述活动板和所述电机定子总成之间。
进一步,所述轴部上设置有至少一限位台,所述限位台和所述磁钢位于所述背铁的同一侧,所述制动盘上开设有与所述限位台配合的限位槽。
进一步,所述电机定子总成还包括:
一固定板,所述固定板固定于所述定子铁芯上,且位于所述定子铁芯背离所述定子绕组的一侧。
进一步,所述制动盘轴线方向的两侧分别固定有与所述活动板和所述固定板相对的摩擦片。
进一步,所述壳体上设置有至少一个支撑部,所述壳体通过所述支撑部连接所述固定板。
进一步,所述活动板上开设有用于避让所述支撑部的避让孔。
进一步,所述壳体朝向所述活动板的一侧开设有用于安装所述线圈的线圈槽。
进一步,所述壳体朝向所述活动板的一侧开设有用于安装所述弹簧的弹簧槽。
进一步,多个所述支撑部沿着所述壳体的外周缘间隔设置,并且相邻的两个所述支撑部之间开设有一所述弹簧槽。
进一步,多个所述支撑部环绕于所述制动盘的外部。
与现有技术相比,本技术方案具有以下优点:
由于所述电机定子总成、所述制动盘和所述制动器定子总成集成于所述转子总成的所述轴部上,以使整体结构的轴向尺寸进一步缩短,以满足电机的受限空间大小,且结构紧凑。并且所述电机定子总成的固定板同时作为与所述制动盘摩擦的固定板,进一步缩短了电机的周向尺寸。
以下结合附图及实施例进一步说明本发明。
附图说明
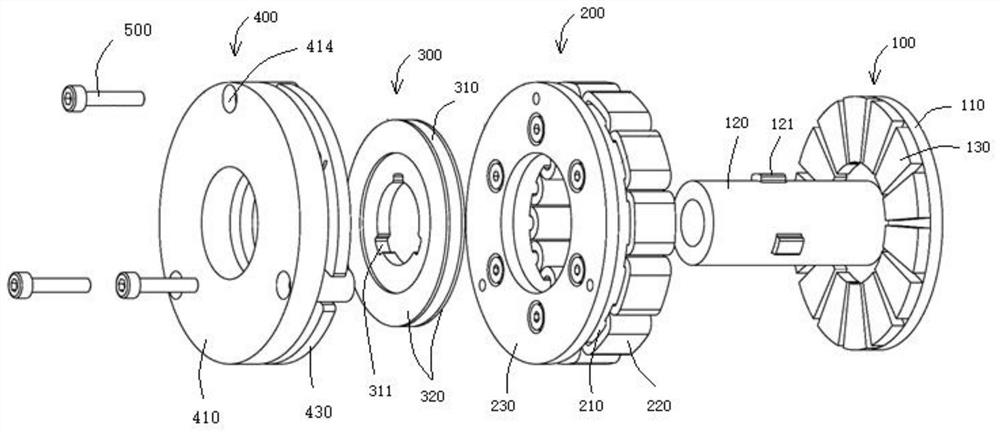
图1是根据本发明所述轴向磁场电机与双摩擦面制动器的集成结构的一个优选实施例结构分解图;
图2是根据本发明所述轴向磁场电机与双摩擦面制动器的集成结构的上述优选实施例的结构示意图;
图3是根据本发明所述轴向磁场电机与双摩擦面制动器的集成结构的上述优选实施例的剖视图;
图4是根据本发明所述电机定子总成的一个优选实施例的分解图;
图5是根据本发明所述电机定子总成的上述优选实施例的结构示意图;
图6是根据本发明所述电机定子总成的上述优选实施例的剖视图;
图7是根据本发明所述制动器定子总成的一个优选实施例的分解图;
图8是根据本发明所述制动器定子总成的上述优选实施例的结构示意图;
图9是根据本发明所述制动器定子总成的上述优选实施例的剖视图;
图10是根据本发明所述转子总成的一个优选实施例的结构示意图;
图11是根据本发明所述转子轴的一个优选实施例的结构示意图;
图12是根据本发明所述转子盘的一个优选实施例的结构示意图;
图13是根据本发明所述转子盘的上述优选实施例的剖视图;
图14是根据本发明所述轴向磁场电机与双摩擦面制动器的集成结构不运行模式的结构示意图;
图15是根据本发明所述轴向磁场电机与双摩擦面制动器的集成结构运行模式的结构示意图。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
如图1至图13所示,所述轴向磁场电机与双摩擦面制动器的集成结构包括:
转子总成100,包括一背铁110、一轴部120和多个磁钢130,所述背铁110与所述轴部120相连接,多个所述磁钢130固定于所述背铁110,且环绕于所述轴部120设置,所述轴部120上设置有至少一限位台121,所述限位台121和所述磁钢130位于所述背铁110的同一侧;
电机定子总成200,包括一定子铁芯210和一定子绕组220,所述定子绕组220固定于所述定子铁芯210上,所述定子铁芯210套设于所述轴部120,且位于所述限位台121与所述磁钢130之间,以使所述定子铁芯210固定所述定子绕组220一侧与所述磁钢130相对设置;
制动盘300,套设于所述轴部120上,所述制动盘300位于所述电机定子总成200背离所述磁钢130的一侧,且所述制动盘300上开设有与所述限位台121配合的限位槽310;
制动器定子总成400,包括一壳体410、一线圈420、一活动板430和至少一弹簧440,所述弹簧440连接于所述壳体410和所述活动板430之间,所述线圈420固定于所述壳体410朝向所述活动板430的一侧,所述壳体410固定于所述电机定子总成200背离所述磁钢130的一侧,以使所述制动盘430在所述线圈420和所述定子绕组220不通电情况下,能够克服所述弹簧440弹力抵接于所述活动板430和所述电机定子总成200之间,进而达到对所述转子总成100制动的作用。
由于所述电机定子总成200、所述制动盘300和所述制动器定子总成400集成于所述转子总成100的所述轴部120上,以使整体结构的轴向尺寸进一步缩短,以满足电机的受限空间大小。
如图10和图11所示,所述转子总成100包括一背铁110、一轴部120和多个磁钢130,所述背铁110和所述轴部120的横截面均可呈圆形,两者可同轴设置,并且所述背铁110的轴向尺寸较小,即所述背铁110较薄,所述轴部120的轴向尺寸较长。多个所述磁钢130固定于所述背铁110上,且环绕于所述轴部120设置,以使多个所述磁钢130呈环形排列,其中所述磁钢130可呈扇形结构,并且相邻的两个所述磁钢130间隔设置。
所述轴部120上设置有至少一限位台121,用于与所述制动盘300上的限位槽310配合,以使所述制动盘300能够沿着所述轴部120的轴线方向移动,参考图1和图3。具体地,所述限位台121的长度方向与所述轴部120的轴线方向相平行,并且所述限位台121的长度长于所述制动盘300的厚度。
所述限位台121的数量可为三个,且沿着所述轴部120外周缘等距间隔设置。相应地,所述制动盘300上的所述限位槽310数量也为三个,每个所述限位台121对应一个所述限位槽310,参考图12。当然所述限位台121的数量还可以为两个或两个以上,通过增加所述限位台121和所述限位槽310的数量,以提升所述制动盘300沿着所述轴部120轴线方向移动的稳定性。
继续参考图10和图11,所述限位台121和所述磁钢130位于所述背铁110的同一侧,并且两者之间存在一定距离,以使套设在所述轴部120上的电机定子总成200,其位于所述限位台121和所述磁钢130之间。
如图3所示,所述轴部120可为管状结构。
如图4至图6所示,所述电机定子总成200包括一定子铁芯210和一定子绕组220,所述定子铁芯210呈环形结构,所述定子铁芯210沿着其径向方向开设有多个绕组安装槽211,以使所述定子铁芯210分割形成多个用于缠绕所述定子绕组220的齿部212,所述定子绕组220沿着所述安装槽211缠绕于所述齿部212的外部。
所述电机定子总成200还包括一固定板230,所述固定板230呈环形,所述定子铁芯210可固定于所述固定板230上,所述定子绕组220固定于所述定子铁芯210背离所述固定板230的一侧。即所述定子铁芯210背离所述固定板230的一侧开设所述绕组安装槽211。
作为优选地,所述定子铁芯210通过第一紧固件240固定在固定板230上。所述第一紧固件240可为螺栓。
由于所述定子铁芯210和所述固定板230均呈环形,因此组装成型的电机定子总成200也呈环形结构,以套设于所述轴部120外部,且位于所述限位台121与所述磁钢130之间。当所述电机定子总成200套设于所述轴部120外时,所述定子铁芯210固定所述定子绕组220一侧与所述磁钢130相对设置,并且所述定子铁芯210和所述磁钢130之间保持一个气隙a,以使所述转子总成100相对所述电机定子总成200发生转动,参考图3。
如图12和图13所述,所述制动盘300呈环形结构,其内壁上开设有多个限位槽310,多个所述限位槽310沿着所述制动盘300内周缘等距间隔设置。
所述制动盘300轴线方向的两侧分别固定有摩擦片320,所述摩擦片320也呈环形,以使所述制动盘300能够套设与所述轴部120,并通过两侧的摩擦片320抵接于所述电机定子总成200和所述活动板430之间,参考图3。具体地,所述制动盘300套设于所述轴部120外,且位于所述电机定子总成200背离所述磁钢130的一侧,以使所述制动盘300上的所述摩擦片320能够抵接于所述固定板230。
如图7至图9所示,所述制动器定子总成400,包括一壳体410、一线圈420、一活动板430和至少一弹簧440,所述壳体410、所述线圈420和所述活动板430均呈环形,进而使组装后的所述制动器定子总成400也呈环形结构,以套设于所述轴部120,且位于所述制动盘300背离所述电机定子总成200的一侧,当所述壳体410固定于所述固定板230上时,所述制动盘300两侧分别通过所述摩擦片320抵接于所述活动板430和所述固定板230之间,参考图1和图3。
具体地,所述壳体410上设置有至少一个支撑部411,所述壳体410通过所述支撑部411连接所述固定板230,以使所述壳体410和所述固定部410之间存在距离,以容纳所述活动板430和所述制动盘300。
作为优选地,所述支撑部411的数量为三个,且沿着所述支撑部411的外周缘等距间隔设置。当然所述支撑部411的数量也可为两个或两个以上。
更优选地,所述壳体410通过第二紧固件500固定于所述固定板230上。具体地,所述壳体410上开设有用于所述第二紧固件500通过的所述套孔414,所述套孔414与所述支撑部411的数量一致,且所述套孔414位于所述支撑部411内,所述第二紧固件500穿过所述套孔414螺接于所述固定板230上,进而使所述壳体410固定于所述固定板230上。所述第二紧固件500可为螺栓。
前述的所述壳体410和所述支撑部411可一体成型。
如图7所示,所述壳体410设置所述支撑部411的一侧开设有用于安装所述线圈420的线圈槽412,所述线圈槽412呈环形,以使呈环形的线圈420安装于所述线圈槽412内。其中所述支撑部411环绕于所述线圈槽412的外部。
继续参考图7,所述壳体410设置所述支撑部411的一侧开设有用于安装所述弹簧440的弹簧槽413,所述弹簧槽413环绕于所述线圈槽412外部。
在一个示例中,相邻的两个所述支撑部411之间开设有一个所述弹簧槽413,此时弹簧槽413的数量为三个,每个所述弹簧槽413内均安装有一所述弹簧440。当然所述弹簧槽413的数量可为两个或两个以上,通过增加所述弹簧440的数量且均匀排列,以使所述制动盘300在所述制动器定子总成400受力均匀,克服弹簧440弹力移动稳定。
继续参考图7,所述活动板430上开设有用于避让所述支撑部411的避让孔431,以使所述支撑部411穿过所述避让孔431固定于所述固定板230上,进而使所述活动板430位于所述壳体410和所述固定板230之间,且能够克服所述弹簧440弹力移动,参考图1和图3。
所述壳体410和所述活动板430均呈环形,这样组装后的所述制动器定子总成400也呈环形,以使所述制动器定子总成400套设于所述轴部120,并使所述活动板430朝向所述制动盘300,所述制动盘300位于多个所述支撑部411之间,即所述制动盘300的直径小于所述活动板430的直径。
参考图1和图3,所述制动器定子总成400组装时,将所述制动器定子总成400套设于所述轴部120外,然后将所述第二紧固件500穿过所述套孔414并螺接于所述固定板230上,以使所述制动盘300位于所述活动板430和所述固定板230之间。需要说明的是,当所述制动器定子总成400后,所述弹簧440处于压缩状态,此时所述活动板430和所述壳体410之间存在空隙a。
参考图1至图13,所述轴向磁场电机与双摩擦面制动器的集成结构可采用以下步骤进行组装:
(1)所述电机定子总成200套设于所述轴部120外,且位于所述限位台121与所述磁钢130之间,以使所述定子铁芯210固定所述定子绕组220一侧与所述磁钢130相对设置并且所述定子铁芯210和所述磁钢130之间保持一个气隙a。
(2)所述制动盘300利用所述限位槽310和所述限位台121配合,以套设于所述轴部120外,且位于所述电机定子总成200背离所述磁钢130的一侧。
(3)所述制动器定子总成400套设于所述轴部120外,并通过所述第二紧固件500穿过所述壳体410上的套孔414,并固定于所述固定板230上,此时所述弹簧400处于压缩状态,以使所述活动板430通过所述制动盘300压紧在所述固定板230上,并保持一定的压力,此时所述活动板430和所述壳体410之间存在空隙a。
如图14所示,所述轴向磁场电机与双摩擦面制动器的集成结构处于不运行模式,其中,所述定子绕组220不通电,该关节模组没有动力,所述制动器定子总成400的线圈420也不通电,不产生磁场。此时所述弹簧440处于压缩状态,以使所述制动盘300两侧的所述摩擦片320分别抵接于所述活动板430和所述固定板230,并保持一定压力。其中所述摩擦片320分别压紧所述活动板430和所述固定板230,产生静摩擦,以防止所述转子总成100转动,保持所述机械手臂的空间位置,避免出现松动现象。
如图15所示,所述轴向磁场电机与双摩擦面制动器的集成结构处于运行模式,其中,所述定子绕组220通入三相交流点,为关节模组提供动力。所述制动器定子总成400的线圈420同时通入直流电,其产生的磁场通过所述壳体410、所述活动板430形成回路,将所述活动板430吸紧在所述壳体410表面,并保持一定的压力。这就要求所述线圈420对所述活动板430的吸力大于所述弹簧440对所述活动板430的推力,才能使所述活动板430吸紧在所述壳体410的表面,此时所述制动盘300是位于所述固定板230和所述活动板430之间,且与两者之间存在间隙h并为松动的,保证所述转子总成100可以顺利转动。
当所述轴向磁场电机与双摩擦面制动器的集成结构断电后,所述关节模组失去动力,但由于惯性,所述转子总成100还在继续转动。所述制动器定子总成400的线圈420同时断电,对所述活动板430的吸力消失,此时所述弹簧440处于压缩状态,将所述活动板430、所述制动盘300压紧在所述固定板230表面,并保持一定的压力。依靠所述摩擦片320的摩擦力将所述转子总成100制动,防止所述转子总成100转动,保持机械手臂的空间位置,避免松动,以恢复到所述集成结构的不运行状态,参考图14。
综上所述,由于所述电机定子总成200、所述制动盘300和所述制动器定子总成400集成于所述转子总成100的所述轴部120上,以使整体结构的轴向尺寸进一步缩短,以满足电机的受限空间大小,且结构紧凑。并且所述电机定子总成200的固定板230同时作为与所述制动盘300摩擦的固定板,进一步缩短了电机的周向尺寸。
除此以外,本领域技术人员也可以根据实际情况对所述电机定子总成200、所述制动盘300和所述制动器定子总成400的形状、结构以及材质进行改变,只要在本发明上述揭露的基础上,采用了与本发明相同或近似的技术方案,解决了与本发明相同或近似的技术问题,并且达到了与本发明相同或近似的技术效果,都属于本发明的保护范围之内,本发明的具体实施方式并不以此为限。
也就是说,只要在本发明上述揭露的基础上,采用了与本发明相同或近似的技术方案,解决了与本发明相同或近似的技术问题,并且达到了与本发明相同或近似的技术效果,都属于本发明的保护范围之内,本发明的具体实施方式并不以此为限。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
- 一种轴向磁场电机与双摩擦面制动器的集成结构
- 一种轴向磁场电机与永磁制动器的集成结构