一种基于多视角的大型工件表面缺陷检测标定方法
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及设计图像处理技术领域,尤其涉及一种基于多视角的大型工件表面缺陷检测标定方法。
背景技术
机器视觉技术已经代替人眼深入到了社会的方方面面,彻底改变了人们的生活环境。机器视觉检测综合了机器视觉和自动化技术,广泛应用于制造行业的产品缺陷检测,例如产品的装配过程检测与定位、产品的包装检测、产品的外观质量检测、物流行业的货物分栋或水果分栋等,机器视觉能够代替人工快速、准确地完成各项工作。
机器视觉是用机器代替人眼,将被拍摄结果转换成图像信号传给图像处理系统,并做出判断和测量,一般采用单一的图像扫描的方式或者移动机器人扫描的方式对大型工件表面进行缺陷进行检测,该方法效率较低,且运动过程中不好标定,基于多视角的大型工件表面缺陷检测需要复杂的标定问题。发明专利CN201910341446.3公开了一种摄影测量后处理辅助尺度恢复及定向的标定装置,其提出了一种立体标定板,该标定板不易把所有的多视角相机都拍摄在里面。
发明内容
本发明的目的在于提供了一种基于多视角的大型工件表面缺陷检测标定方法,有效的提高多视角下大型工件表面缺陷检测定位能力,为工业自动化提供更好的依据。
为了解决上述技术问题,本发明提供了一种基于多视角的大型工件表面缺陷检测标定方法,采用多个相机固定在大型工件的正上方或者两侧,且大型工件的三维模型已知,其具体包括以下步骤:
(1)构建三维模型SIFT特征点的离线库,首先对大型工件进行三维建模,确定大型工件各个点的相对位置关系,然后利用相机生成正下方的俯视图像,对俯视图像进行SIFT特征点的提取,从而构建SIFT特征点和三维模型中大型工件各个点的相对位置关系的离线库;
(2)构建多相机图像的在线SIFT特征点库,即在线标点中,每个相机获取当前目标的二维图像,提取SIFT特征点,建立在线相机与对应相机图像的SIFT特征点在线库;
(3)利用三维模型SIFT特征点的离线库与多相机二维图像的在线SIFT特征点库进行匹配,对匹配的特征点在三维模型中进行定位,定位匹配特征点的三维坐标;
(4)利用已经定位匹配特征点的三维坐标,根据相机内参数,和二维图像对应的坐标对相机外参数进行标定。
进一步的,所述构建三维模型SIFT特征点的离线库的具体步骤为:
S1.在大型工件三维模型已知的情况下,以三维模型的一点为原点,建立以该原点为中心的坐标系
S2.采用多视角相机拍摄正下方大型工件的俯视图像,对俯视图像进行SIFT特征点提取,提取的SIFT特征点对用的工件表面上的坐标为
S3.根据多视角相机的大概位置划分为
进一步的,所述构建多相机图像的在线SIFT特征点库的具体步骤为:
P1.采集每个相机的二维图像,获取该二维图像的SIFT特征点以及对应的特征值;
P2.根据上述SIFT特征点以及对应的特征值生成对应相机内参数矩阵
进一步的,所述利用三维模型SIFT特征点的离线库与多相机二维图像的在线SIFT特征点库进行匹配,即所述特征向量
进一步的,所述相机外参数的标定依据为:根据相机内参数
进一步的,所述相机外参数进行标定后,以获取相机外参数矩阵,所述相机外参数矩阵为相对于大型工件的坐标系
本发明提供的基于多视角的大型工件表面缺陷检测标定方法可应用于大型机床的裂纹检测、表面腐蚀的缺陷检测、多视角飞机蒙皮缺陷检测等方面。
本发明取得了以下有益效果:本发明的一种基于多视角的大型工件表面缺陷检测标定方法,主要是针对多视角的大型工件表面缺陷检测标定复杂,利用二、三维标定板对结构工艺要求较高的特征,开展在线的基于多视角的大型工件表面缺陷检测标定,为实现非接触、无破坏的精确测量,实现精确化维护管理提供一种新的标定方法。
附图说明
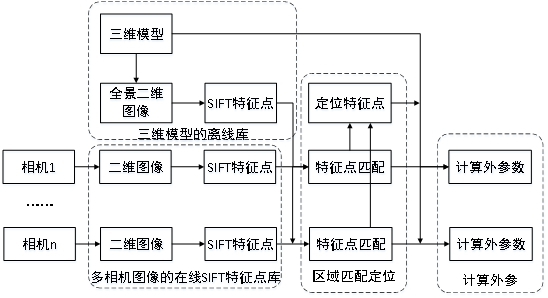
图1是本发明的基于多视角的大型工件表面缺陷检测标定方法流程图;
图2是本发明的SIFT特征检测流程图;
图3是本发明的一实施例的飞机表面SIFT特征点示意图。
具体实施方式
下面结合附图对本发明的具体实施方式进行详细地描述。本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
本发明主要是针对多视角的大型工件表面缺陷检测标定复杂,利用二、三维标定板对结构工艺要求较高的特点,本文开展在线的基于多视角的大型工件表面缺陷检测标定,为实现非接触、无破坏的精确测量,实现精确化维护管理提供一种新的标定方法。
本发明提供的基于多视角的大型工件表面缺陷检测标定方法,是在大型工件的三维模型已知的情况下,采用多个相机固定在大型工件的正上方或者两侧对大型工件表面缺陷检测进行标定的方法。本发明的在线标定方法可应用于大型机床的裂纹检测、表面腐蚀的缺陷检测、多视角飞机蒙皮缺陷检测等方面。
如图1所示,本发明提供的基于多视角的大型工件表面缺陷检测标定方法,其包括以下步骤:
(1)构建三维模型SIFT特征点的离线库,首先对大型工件进行三维建模,确定大型工件各个点的相对位置关系,然后利用相机生成正下方的俯视图像,对俯视图像进行尺度不变特征(SIFT)特征点的提取,从而构建SIFT特征点和三维模型中大型工件各个点的相对位置关系的离线库。构建该三维模型SIFT特征点的离线库的具体步骤为:
S1.在大型工件三维模型已知的情况下,以三维模型的一点为原点,建立以该原点为中心的坐标系
S2.采用多视角相机拍摄正下方大型工件的俯视图像,对俯视图像进行SIFT特征点提取,提取的SIFT特征点对用的工件表面上的坐标为
S3.根据多视角相机的大概位置划分为
其中,
(2)构建多相机图像的在线SIFT特征点库,即在线标点中,每个相机获取当前目标的二维图像,提取SIFT特征点,建立在线相机与对应相机图像的SIFT特征点在线库。构建该多相机图像的在线SIFT特征点库的具体步骤为:
P1.采集每个相机的二维图像,获取该二维图像的SIFT特征点以及对应的特征值。
P2.根据上述SIFT特征点以及对应的特征值生成对应相机内参数矩阵
其中,
(3)利用三维模型SIFT特征点的离线库与多相机二维图像的在线SIFT特征点库进行匹配,即特征向量
其中,
当上述特征向量
其中
(4)利用已经定位匹配特征点的三维坐标
上述相机外参数进行标定后,获得相机外参数矩阵。该相机外参数矩阵为相对于大型工件的坐标系
SIFT为尺度不变特征点,具有较好的旋转、缩放、倾斜变化的不变特征,因此较多的用于特征点的匹配中。如图2所示,为SIFT特征检测原理图,该SIFT特征检测的原理为:输入图像,图像通过上采样或者下采样生成图像金字塔,其中对图像金字塔进行高斯卷积,生成高斯差分金字塔(DOG金字塔),尺度空间构建,然后对空间极值点检测、特征点方向检测,生成稳定关键点的精确定位,最后时生成特征描述子,即SIFT特征点。因此本文采用SIFT的特征点作为本文的特征点匹配。
下面结合具体实施例来确定大型工件表面的SIFT特征点,如图3所示。
图3为飞机表面的SIFT特征点,其中,101为单个相机的视场角区域,104为目标划分区域其根据多视角相机的大概位置划分为
101区域与104的各个区域可能重叠,且观察的角度也不一样,对于单个相机采用101单个区域的SIFT特征点与104的各个区域的特征点进行逐一匹配,当特征点集合匹配阈值大于
以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种基于多视角的大型工件表面缺陷检测标定方法
- 一种基于多视角模板匹配的电路板表面缺陷检测的方法