一种异步式三轴姿态控制磁悬浮惯性执行机构
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及空间飞行器技术领域,具体涉及一种异步式三轴姿态控制磁悬浮惯性执行机构。
背景技术
惯性执行机构是空间飞行器姿态控制系统的核心装置之一,得益于其无需消耗工质、控制力矩精度高等优点,被广泛用于卫星等空间飞行器的姿态控制。
按照转子支承方式,惯性执行机构可分为机械惯性执行机构和磁悬浮惯性执行机构两大类。相比于机械惯性执行机构,磁悬浮惯性执行机构利用磁悬浮技术使惯性执行机构的转子悬浮,避免了惯性执行机构的转子与固定部件之间的机械接触,具有无摩擦、无磨损、高精度、长寿命等优势,在未来高精度、高稳定度空间飞行器上有广阔的应用前景。
然而,传统磁悬浮惯性执行机构通常采用磁轴承使其转子悬浮,导致磁悬浮惯性执行机构的重量大于机械惯性执行机构,限制了磁悬浮惯性执行机构的应用。
为了解决这一问题,本技术领域研究人员已经做了一些研究,如专利CN105775169A公开了一种命名为“一种磁化悬浮感应驱动式反作用动量球”的磁悬浮惯性执行机构,所述磁化悬浮感应驱动式反作用动量球由球形转子、弧形定子等组成,通过6个弧形定子上的线圈与球形转子之间的相互作用实现三轴控制力矩的输出和空间飞行器的三轴姿态控制;然而,所述磁化悬浮感应驱动式反作用动量球采用6套合计36个绕组驱动其转子,导致装置结构复杂,不仅增加了制造的难度,还会导致控制系统复杂,不利于其应用。相应地,本技术领域存在着发展一种结构简单、易于制造和控制的三轴姿态控制磁悬浮惯性执行机构的技术需求。
发明内容
本发明的目的在于提供一种异步式三轴姿态控制磁悬浮惯性执行机构,将定子与转子相结合,所述定子包含定子框架、定子绕组和传感器,所述转子包含转子导体板,所述转子与所述定子之间存在气隙,利用各个定子绕组产生的三维空间电磁场与转子导体板之间的相互作用实现转子的悬浮和旋转,由于没有轴承结构的约束,其转子可以绕三维空间中任意轴旋转,具有输出三轴控制力矩的能力,同时,其结构简单、易于制造和使用控制。
为了达到上述目的,本发明通过以下技术方案实现:
一种异步式三轴姿态控制磁悬浮惯性执行机构,包含定子和转子,所述转子位于所述定子的空腔结构内,正常工作时,所述转子与所述定子之间无机械接触,
其中,所述定子包含:
若干个定子框架,各个定子框架之间相互连接,各个定子框架围成所述定子的空腔结构;
若干个定子绕组,各个所述定子绕组分别安装在所述定子框架上;
若干个传感器,各个所述传感器分别安装在所述定子框架上;
所述转子包含:
转子导体板,其设置于所述定子的空腔结构内。
可选的,所述转子还包含:
转子框架,所述转子导体板固定于所述转子框架的外表面上。
可选的,转子框架为空心结构或实心结构。
可选的,所述转子导体板为空心结构或实心结构。
可选的,所述转子为球形。
可选的,所述转子导体板采用高电导率材料制备;
和/或,所述定子框架采用铁磁性材料或非铁磁性材料制备。
可选的,所述定子绕组为圆环形结构或圆形结构或矩环形结构或球形结构。
可选的,所述定子包含6个定子框架,各个定子框架共同组成一个长方体结构或正方体结构;
和/或,所述定子包含6个传感器,各个所述传感器分别安装在所述定子框架上。
可选的,所述定子包含6个定子绕组,一个定子绕组设置于一个定子框架上,各个所述定子绕组对称设置。
可选的,所述定子包含24个定子绕组,4个定子绕组固定于一个定子框架上,各个所述定子绕组对称设置。
本发明与现有技术相比具有以下优点:
本发明的异步式三轴姿态控制磁悬浮惯性执行机构,利用各个定子绕组产生的三维空间电磁场与转子导体板之间的相互作用实现转子的悬浮和旋转;由于没有轴承结构的约束,其转子可以绕三维空间中任意轴旋转,具有输出三轴控制力矩的能力,因此,采用一个异步式三轴姿态控制磁悬浮惯性执行机构即可实现空间飞行器的三轴姿态控制。
进一步的,本发明的异步式三轴姿态控制磁悬浮惯性执行机构,利用磁悬浮技术使转子悬浮在定子的空腔结构中,转子与定子之间没有机械接触;该惯性执行机构可实现定子绕组产生的三维空间电磁场基波与其转子永磁体产生的三维空间磁场基波异步旋转。
进一步的,本发明的异步式三轴姿态控制磁悬浮惯性执行机构,基于异步电机原理工作,其转子中储存的能量可以通过合理的控制方式回馈至电源,因此异步式三轴姿态控制磁悬浮惯性执行机构具有一定的储能功能。
进一步的,本发明的异步式三轴姿态控制磁悬浮惯性执行机构,具有结构简单、重量较轻、易于制造和控制、无摩擦、无磨损、无需润滑、可以储存能量的优点。
附图说明
图1为本发明一种异步式三轴姿态控制磁悬浮惯性执行机构外表面示意图;
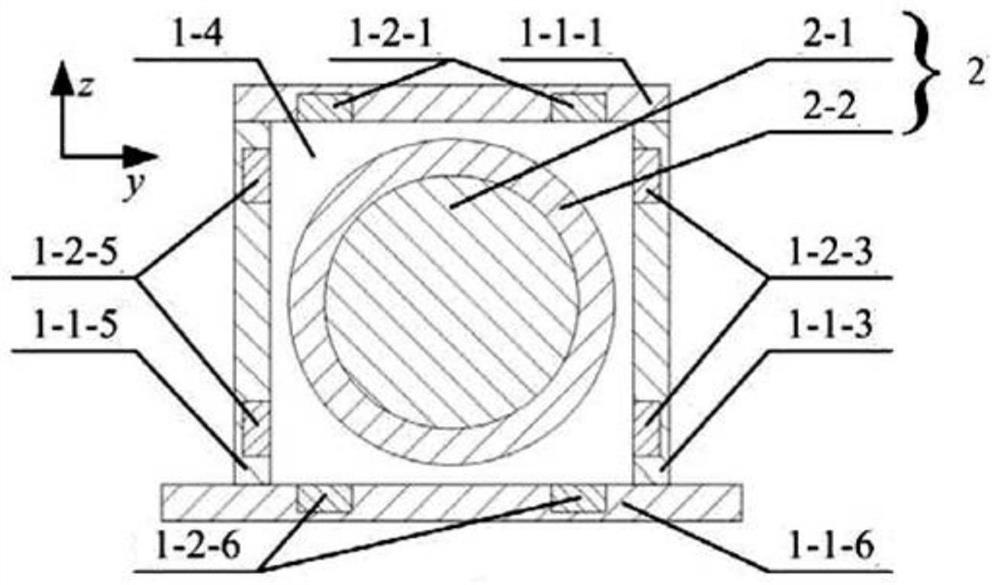
图2为图1中的异步式三轴姿态控制磁悬浮惯性执行机构正剖视图;
图3为图1中的异步式三轴姿态控制磁悬浮惯性执行机构仰视图;
图4为本发明实施例一中各个定子绕组在三维空间中的相对位置示意图;
图5为本发明实施例二的异步式三轴姿态控制磁悬浮惯性执行机构的正剖视图;
图6为本发明实施例三的异步式三轴姿态控制磁悬浮惯性执行机构的正剖视图;
图7为本发明实施例四的异步式三轴姿态控制磁悬浮惯性执行机构的正剖视图;
图8为本发明实施例五中各个定子绕组在三维空间中的相对位置示意图;
图9为本发明实施例六中各个圆环形定子绕组在三维空间中的相对位置示意图;
图10为本发明实施例六中各个矩环形定子绕组在三维空间中的相对位置示意图。
具体实施方式
以下结合附图,通过详细说明一个较佳的具体实施例,对本发明做进一步阐述。
实施例一
如图1~图4结合所示,为本发明的一种异步式三轴姿态控制磁悬浮惯性执行机构,其包含定子1和转子2,所述转子2位于所述定子1的空腔结构内,所述转子2和所述定子1之间存在气隙,正常工作时,所述转子2与所述定子1之间无机械接触。
其中,所述定子1包含:若干个定子框架1-1、若干个定子绕组1-2和若干个传感器1-3,各个所述定子框架1-1之间相互连接围成所述定子1的空腔结构1-4,各个定子框架1-1共同组成一个长方体结构或正方体结构,各个所述定子绕组1-2分别安装在所述定子框架1-1上,各个所述传感器1-3分别安装在所述定子框架1-1上。所述定子框架1-1用于安装定子绕组1-2并保持定子绕组1-2的相对位置关系,定子绕组1-2一般是金属线绕制成的,比较软。
在本实施例中,所述定子1包含6个传感器1-3、6个定子绕组1-2和6个定子框架1-1,以1-1-1~1-1-6、1-2-1~1-2-6分别表示不同方位/位置处的定子框架1-1、定子绕组1-2。
如图2和图3结合所示,在本实施例中,所述定子绕组1-2为圆环状结构。一个定子绕组1-2设置于一个定子框架1-1上,6个定子绕组1-2在空间中的相对位置如图3所示,各个所述定子绕组1-2对称地安装在各个定子框架1-1上。可选的,所述定子框架1-1采用铁磁性材料或非铁磁性材料制备。
如图4所示,在本实施例中,一个传感器1-3设置于一个定子框架1-1上,各个所述传感器1-3安装在各个定子框架1-1上,其位置根据测量原理进行设定。当然,所述传感器1-3的个数和位置不仅限于此,其个数和安装位置还可根据测量原理进行另外的调整。
如图2所示,在本实施例中,所述转子2包含:转子框架2-1和转子导体板2-2,两者均设置于所述定子1的空腔结构1-4内,所述转子导体板2-2固定于所述转子框架2-1的外表面上。可选的,所述转子导体板2-2采用高电导率材料制备,有利于增大感应电流,从而增加驱动力。当然,所述转子导体板2-2的材质不仅限于高电导率材料(如金属铜等),也可以是其他可实现相应功能的一般导电材料。所述转子导体板2-2通过铸造等方式固定在所述转子框架2-1上,所述转子框架2-1为实心结构。所述转子2整体外表面为球面或近似为球面,以便维持高速旋转中的转子的动平衡,有利于维护整体系统的稳定性。
在本实施例中,异步式三轴姿态控制磁悬浮惯性执行机构工作时,各个传感器1-3用于检测转子2和定子1之间的相对位置和姿态,随后,转子2和定子1的相对位置和姿态信息信息被发送至控制器,控制器通过对相对位置和姿态信息的处理,结合参考指令,根据一定的控制规律,生成控制信号,并将控制信号发送至驱动电路,驱动电路给定子绕组1-2通电,产生运动磁场,该运动磁场切割转子导体板2-2,在转子导体板2-2中产生感应电流,运动磁场与感应电流之间相互作用产生电磁力,该电磁力驱动转子2运动。
该异步式三轴姿态控制磁悬浮惯性执行机构利用各个定子绕组1-2产生的三维空间电磁场与转子导体板2-2之间的相互作用实现转子2的悬浮和旋转;由于没有轴承结构的约束,其转子2可以绕三维空间中任意轴旋转,具有输出三轴控制力矩的能力。因此,采用一个异步式三轴姿态控制磁悬浮惯性执行机构即可实现空间飞行器的三轴姿态控制。在工作过程中,控制器通过控制输送给各个电子绕组的电流大小,来控制定子绕组1-2产生的三维空间电磁场的方向和强度,以控制转子2运动的中心轴。
另外,在工作过程中,转子导体板2-2内产生感应电流,基于异步电机的原理,转子2即转子导体板2-2中储存的能量可以通过控制器操控回馈至电源。
实施例二
基于实施例一中的异步式三轴姿态控制磁悬浮惯性执行机构的结构特性,本实施例对转子框架2-1的结构做出了一些改变。如图5所示,为本实施例的一种异步式三轴姿态控制磁悬浮惯性执行机构,在本实施例中,所述转子框架2-1为空心结构。
实施例三
基于实施例一或实施例二中的异步式三轴姿态控制磁悬浮惯性执行机构的结构特性,本实施例对转子2的结构做出了一些改变。如图6所示,为本实施例的一种异步式三轴姿态控制磁悬浮惯性执行机构,在本实施例中,所述转子2完全由转子导体板2-2构成,且转子导体板2-2为实心结构。
实施例四
基于实施例一中的异步式三轴姿态控制磁悬浮惯性执行机构的结构特性,本实施例对转子2的结构做出了一些改变。如图7所示,为本实施例的一种异步式三轴姿态控制磁悬浮惯性执行机构,在本实施例中,所述转子2完全由转子导体板2-2构成,且转子导体板2-2为空心结构。
实施例五
基于实施例一中的异步式三轴姿态控制磁悬浮惯性执行机构的结构特性,本实施例对定子1的结构做出了一些改变。如图8所示,为本实施例的一种异步式三轴姿态控制磁悬浮惯性执行机构,在本实施例中,所述定子1中的定子绕组1-2为矩环形。当然,所述定子绕组1-2的形状不仅限于此,其还可以为圆形或球形的一部分。
实施例六
基于实施例一中的异步式三轴姿态控制磁悬浮惯性执行机构的结构特性,本实施例对定子1的结构做出了一些改变。如图9和图10结合所示,在本实施例中,所述定子1中的定子绕组1-2的个数为24个,所述定子绕组1-2的形状为圆环形(请见图9)或矩环形(请见图10)。24个定子绕组1-2在空间中的位置分布如图9和图10所示,4个定子绕组1-2固定于一个定子框架1-1上,各个所述定子绕组1-2对称设置。
综上所述,本发明的一种异步式三轴姿态控制磁悬浮惯性执行机构,将定子1与转子2相结合,所述定子1包含定子框架1-1、定子绕组1-2和传感器1-3,所述转子2包含转子框架2-1和转子导体板2-2,所述转子2与所述定子1之间存在气隙,利用各个定子绕组1-2产生的三维空间电磁场与转子导体板2-2之间的相互作用实现转子2的悬浮和旋转,由于没有轴承结构的约束,其转子2可以绕三维空间中任意轴旋转,具有输出三轴控制力矩的能力。因此,采用一个异步式三轴姿态控制磁悬浮惯性执行机构即可实现空间飞行器的三轴姿态控制。
进一步的,本发明的异步式三轴姿态控制磁悬浮惯性执行机构具有结构简单、易于制造和控制、无摩擦、无磨损、无需润滑、可以储存能量的优点。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
- 一种异步式三轴姿态控制磁悬浮惯性执行机构
- 一种太阳帆航天器三轴姿态控制执行机构