一种钻杆抓取装置及方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及煤矿机械领域,具体涉及一种钻杆抓取装置及方法。
背景技术
在随着煤矿井下设备的发展,自动化成为了目前煤矿井下设备发展的重要方向,自动化和智能化的技术被应用到越来越多的煤矿井下设备中。通过机械手爪配合抓取钻杆箱中的钻杆被现有技术所公开。
在钻探施工中由于环境不同导致需要选择不同类型的钻杆进行钻探作业,其中包括圆形钻杆、三棱钻杆、螺旋钻杆等,现有技术通过设备进行自动施工时通过机械手爪抓取钻杆进行自动装钻杆与自动拆卸钻杆作业。然而现有技术中存在的问题在于,机械手爪在进行钻杆抓取动作时,因为移动、设备震动或者其他原因可能会使得钻杆掉落,进而抓取动作无效。因此,目前亟需一种能够与钻杆抓取装置结合判断钻杆是否抓取成功的装置和方法。
发明内容
为解决现有技术中存在的问题,本发明提出一种钻杆抓取装置及方法,通过机械手爪和可伸缩式传感器之间的配合,识别钻杆抓取装置在作业过程中是否已经抓取到钻杆,进而解决现有技术中无法判断是否抓取到钻杆的问题。
根据本发明的一个方面,一种钻杆抓取装置,包括:机械手爪部分和传感器部分;所述机械手爪部分包括液压油缸、支架(11)、推拉块(12)、连杆(13)、手爪(14)、销轴A(15)、销轴B(16)、销轴C(17);所述推拉块(12)通过螺钉与所述液压油缸连接,通过销轴C(17)将推拉块(12)和连杆(13)铰接在一起,通过销轴B(16)将连杆(13)的另一端与手爪(14)的一个铰接孔连接,通过销轴A(15)将手爪(14)与支架(11)铰接;所述传感器部分为可伸缩式传感器,包括固定座(21)、感应块(22)、弹簧(23)、限位螺钉(24)以及接近开关传感器(25);所述固定座(21)承载感应块(22)、弹簧(23)、限位螺钉(24)以及接近开关传感器(25),所述感应块(22)设置在所述手爪(14)的上方,所述弹簧(23)连接感应块(22)、限位螺钉(24)以及接近开关传感器(25)。
进一步可选的,所述液压油缸伸缩时推拉块(12)移动,由此带动连杆(13)拉动手爪(14)绕销轴A(15)转动,使两手爪(14)之间角度发生变化,液压油缸推动推拉块(12)时两手爪(14)向内转动,所述机械手爪部分闭合;液压油缸拉动推拉块(12)使两手爪(14)向外转动,所述机械手爪部分打开。
进一步可选的,所述固定座为非金属材质。
根据本发明的另一个方面,一种钻杆抓取方法,包括:当钻杆抓取装置需要抓取钻杆时,感应块(22)通过判断压缩弹簧(23)带动限位螺钉(24)产生的位移量,感应限位螺钉(24)是否在接近开关传感器(25)的感应范围内,进而判断钻杆是否已经进入手爪(14)内部,控制手爪(14)抓紧钻杆;当钻杆抓取装置需要放置钻杆时,手爪(14)松开钻杆,感应块(22)在弹簧(23)的作用力下向外移动,使限位螺钉(24)脱离接近开关传感器(25)感应范围,判定钻杆已脱离手爪(14)。
进一步可选的,所述钻杆抓取方法还包括:当手爪(14)抓紧钻杆移动过程中,若所述接近开关传感器(25)感应信号中断,则判断为钻杆抓取装置丢失钻杆,中断钻杆抓取装置的操作。
本发明的有益效果在于:
本发明通过在机械手爪侧面安装传感器判断钻杆抓取装置是否抓取到钻杆,保证抓取钻杆的可靠性,并通过伸缩式传感器实现接近开关对异形钻杆的判断。
附图说明
图1示出了本发明提出的钻杆抓取装置的机械手爪部分结构图;
图2示出了本发明提出的机械抓取装置的传感器部分结构图;
图3示出了本发明提出的传感器传感范围示意图;
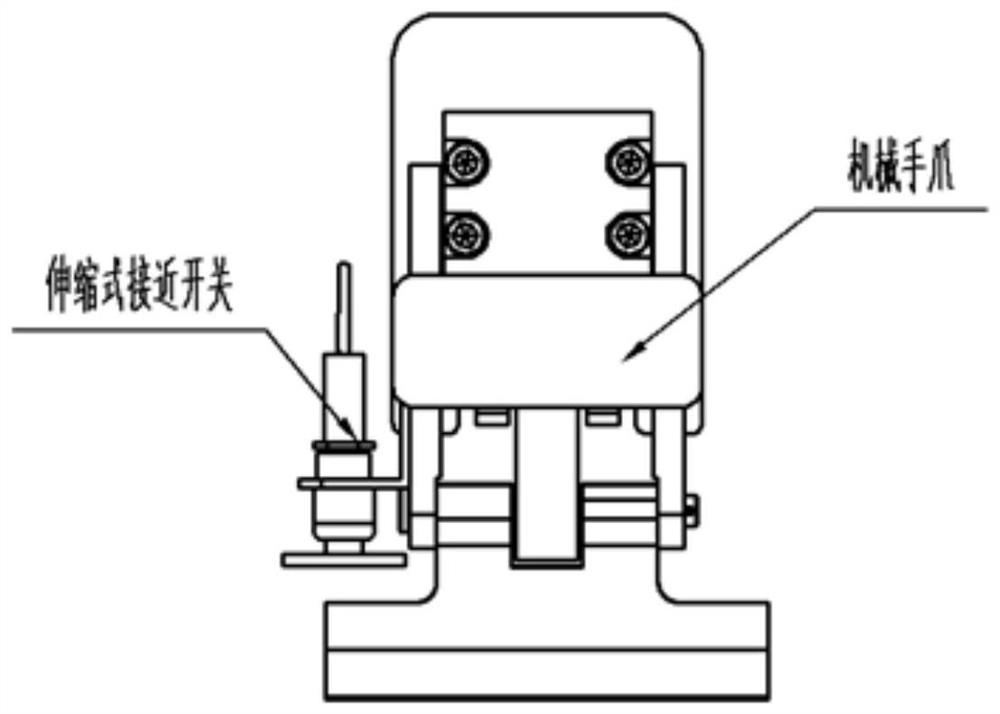
图4示出了本发明提出的钻杆抓取装置的结构图。
附图标记说明:支架11、推拉块12、连杆13、手爪14、销轴A15、销轴B16、销轴C17、固定座21、感应块22、弹簧23、限位螺钉24以及接近开关传感器25。
具体实施方式
现在将参照若干示例性实施例来论述本发明的内容。应当理解,论述了这些实施例仅是为了使得本领域普通技术人员能够更好地理解且因此实现本发明的内容,而不是暗示对本发明的范围的任何限制。
如本文中所使用的,术语“包括”及其变体要被解读为意味着“包括但不限于”的开放式术语。术语“基于”要被解读为“至少部分地基于”。术语“一个实施例”和“一种实施例”要被解读为“至少一个实施例”。术语“另一个实施例”要被解读为“至少一个其他实施例”。
实施例1
图1示出了本实施例提出的一种钻杆抓取装置的机械手爪部分结构图,图2示出了本实施例提出的一种钻杆抓取装置的传感器部分结构图,图3示出了本实施例提出的传感器传感范围对比示意图,图4示出了本实施例提出的钻杆抓取装置的结构图。本实施例将对技术方案进行清楚、完整的描述,所描述的实施例只是本发明一部分实施例,而不是全部的实施例。本实施例公开一种钻杆抓取装置,其主要包括:
液压油缸、支架11、推拉块12、连杆13、手爪14、销轴A15、销轴B16、销轴C17;
实施时通过螺钉将推拉块12与液压油缸连接,通过销轴C17将连杆13推拉块铰接在一起,通过销轴B16将连杆13的另一端与手爪14的一个铰接孔铰接,通过销轴A15将手爪14与支架11铰接。当液压油缸伸缩时推拉块12移动,此时连杆13拉动手爪14绕销轴A15转动,使两手爪14之间角度发生变化。液压油缸推动推拉块12时两手爪14向内转动,机械手爪部分闭合;液压油缸拉动推拉块12使两手爪向外转动,机械手爪打开。
液压油缸伸缩时推拉块12移动,由此带动连杆13拉动手爪14绕销轴A15转动,使两手爪14之间角度发生变化,液压油缸推动推拉块12时两手爪14向内转动,机械手爪部分闭合;液压油缸拉动推拉块12使两手爪14向外转动,所述机械手爪部分打开。
传感器部分为可伸缩式传感器,包括固定座21、感应块22、弹簧23、限位螺钉24以及接近开关传感器25;固定座21承载感应块22、弹簧23、限位螺钉24以及接近开关传感器25,感应块22设置在手爪14的上方,弹簧23连接感应块22、限位螺钉24以及接近开关传感器25,固定座21为非金属材质。
实施例2
本实施例公开一种钻杆抓取方法,其主要包括:
当机械手需要抓取钻杆时,通过液压油缸油缸回拉推拉块12向前移动,手爪14打开;此时钻杆抓取装置移动至钻杆进入手爪14内部。
当钻杆顶到感应块22上时,使感应块22压缩弹簧23向固定座21内侧移动,带动限位螺钉24向接近开关传感器25侧移动,当限位螺钉24进入接近开关传感器25感应范围时,接近开关传感器25接收到信号,此时钻杆抓取装置停止动作、液压油缸推动推拉块12使两手爪14向内转动,抓紧钻杆。
当钻杆抓取装置驱动机械手爪部分至需放置钻杆的位置时,手爪14松开钻杆,此时感应块22在弹簧23的反作用下向外移动,使限位螺钉24脱离接近开关传感器25的感应范围,以此判定钻杆已脱离手爪14,钻杆抓取装置可继续其它动作。
当钻杆抓取装置移动过程中,若接近开关信号中断,则判断为手爪14丢失钻杆或接近开关传感器25故障,系统将自动暂停。
同时,由于感应块22的伸缩功能,可针对不同类型的钻杆出现不同程度的压缩,只要钻杆外表面可满足感应块22压缩的最大距离与最小距离差值在接近开关传感器25的感应范围内,接近开关传感器25均能监测到钻杆,实现对钻杆抓取装置是否抓到钻杆的判断。图3即示出钻杆抓取装置在抓取不同形状钻杆时弹簧23不同程度的压缩,来判断手爪14是否抓到钻杆。
以上描述仅为本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
应理解,本发明的发明内容及实施例中各步骤的序号的大小并不绝对意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
- 一种钻杆抓取装置及方法
- 一种钻杆抓取装置