四油垫静压导轨运动精度评价方法及系统
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及静压导轨误差领域,具体为四油垫静压导轨运动精度评价方法及系统。
背景技术
静压导轨作为精密、超精密和三坐标测量机的重要功能部件,其导轨滑块的运动直线度对加工和测量零件的精度具有重要影响。因此,有必要研究静压导轨系统结构参数对滑块运动直线度的影响规律,为提高运动直线度提供理论依据。当静压导轨油垫结构尺寸较小,可将其分别简化为一刚性小轮,油垫中心距与导轨面轮廓误差波长的比值为0.5,1.5,2.5……,运动直线度误差为零。然而,当静压导轨油垫长度较大,则不能将其简化为一刚性小轮,否则会造成其相关结构参数的错误评价,无法提高四油垫静压导轨运动精度。
发明内容
针对现有技术中存在的问题,本发明提供一种四油垫静压导轨运动精度评价方法及系统,设计合理,方法简单,能够得到油垫中心距较大时四油垫静压导轨运动直线度,大幅度提高静压导轨运动直线度精度。
本发明是通过以下技术方案来实现:
四油垫静压导轨运动精度评价方法,包括,
根据预设条件,将油垫中心距较大的四油垫静压导轨模型进行简化;
根据简化后的四油垫静压导轨模型,计算得到静压导轨面轮廓误差方程;
根据理论油膜厚度和静压导轨面轮廓误差,得到封油面处的油膜厚度方程;
将四油垫静压导轨等效为准静态模型,油膜等效为线性弹簧单元,根据封油面处的油膜厚度,得到当导轨滑块运动时油垫的油膜支承力方程;
根据各油垫的油膜支承力合力与外载荷平衡,保持滑块平衡状态,得到静压导轨静力学平衡方程;
联立静压导轨面轮廓误差方程、油膜厚度方程、油膜支承力方程和静压导轨静力学平衡方程,求解得到静压导轨运动直线度,对四油垫静压导轨运动精度进行评价。
优选的,所述预设条件,包括假设导轨面轮廓误差在油垫宽度方向不改变,以及忽略导轨面沿滑块宽度x方向的轮廓误差变化。
优选的,所述根据简化后的四油垫静压导轨模型,计算得到静压导轨面轮廓误差,通过傅里叶级数拟合,表示如下,
式中:E为误差幅值,λ为轮廓误差波长,
优选的,所述根据理论油膜厚度和静压导轨面轮廓误差,得到封油面处的油膜厚度,具体如下:
h(y)=h
式中:h
优选的,所述当导轨滑块运动时油垫的油膜支承力,具体表示如下,
式中:e
优选的,所述根据各油垫的油膜支承力合力与外载荷平衡,保持滑块平衡状态,得到静压导轨静力学平衡方程,具体如下:
式中,f
优选的,所述联立方程,求解得到静压导轨运动直线度,具体如下:
e
式中,A为滑块结构参数矩阵;B为油膜刚度系数矩阵;A
四油垫静压导轨运动精度评价系统,包括,
模型简化模块,用于根据预设条件,将油垫中心距较大的四油垫静压导轨模型进行简化;
导轨面轮廓误差模块,用于根据简化后的四油垫静压导轨模型,计算得到静压导轨面轮廓误差方程;
油膜厚度模块,用于根据理论油膜厚度和静压导轨面轮廓误差,得到封油面处的油膜厚度方程;
油膜支承力模块,用于将四油垫静压导轨等效为准静态模型,油膜等效为线性弹簧单元,根据封油面处的油膜厚度,得到当导轨滑块运动时油垫的油膜支承力方程;
静力学平衡方程模块,用于根据各油垫的油膜支承力合力与外载荷平衡,保持滑块平衡状态,得到静压导轨静力学平衡方程;
直线度模块,用于联立静压导轨面轮廓误差方程、油膜厚度方程、油膜支承力方程和静压导轨静力学平衡方程,求解得到静压导轨运动直线度,对四油垫静压导轨运动精度进行评价。
与现有技术相比,本发明具有以下有益的技术效果:
本发明一种四油垫静压导轨运动精度评价方法,能够对油垫中心距较大的四油垫静压导轨运动直线度进行计算;首先简化油垫中心距较大的静压导轨模型,并将静压导轨的导轨面误差进行数学表达,然后计算静压导轨面轮廓误差的油膜厚度,再建立考虑油垫中心距的油膜力计算模型和静压导轨静力学平衡方程,联立方程得到油垫中心距与导轨面轮廓误差波长的比值与运动直线度的对应关系,求解得到考虑油垫中心距的四油垫静压导轨运动直线度,从而更加准确的对四油垫静压导轨的运动直线度进行计算,能够判定滑块运动直线度误差,对四油垫静压导轨运动精度进行评价,从而为四油垫静压导轨精度设计提供了理论指导。
附图说明
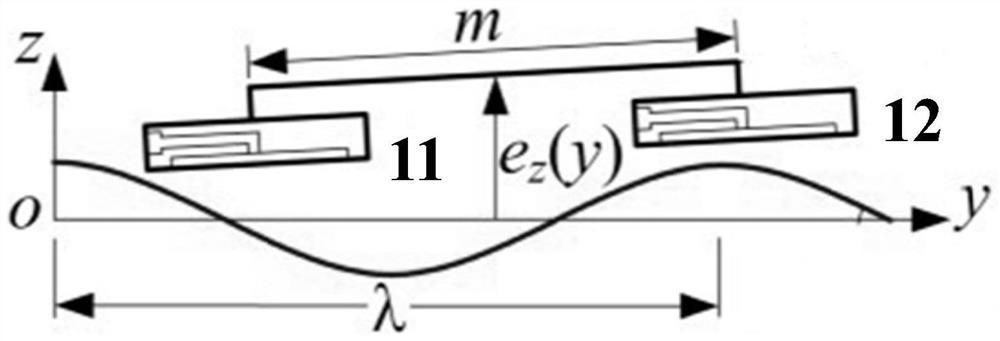
图1本发明实例中所述油垫中心距较大的静压导轨模型简化示意图;
图2本发明实例中所述导轨轮廓误差及油垫结构示意图;
图3本发明实例中所述静压导轨等效力学模型示意图;
图中:油垫1,第一油垫11,第二油垫12,滑块2,宽度方向油膜21,长度方向油膜22,导轨3。
具体实施方式
下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
本发明考虑油垫中心距的四油垫静压导轨运动精度评价方法,包括:
根据预设条件,将油垫中心距较大的四油垫静压导轨模型进行简化;
根据简化后的四油垫静压导轨模型,计算得到静压导轨面轮廓误差方程;
根据理论油膜厚度和静压导轨面轮廓误差,得到封油面处的油膜厚度方程;
将四油垫静压导轨等效为准静态模型,油膜等效为线性弹簧单元,根据封油面处的油膜厚度,得到当导轨滑块运动时油垫的油膜支承力方程;
根据各油垫的油膜支承力合力与外载荷平衡,保持滑块平衡状态,得到静压导轨静力学平衡方程;
联立静压导轨面轮廓误差方程、油膜厚度方程、油膜支承力方程和静压导轨静力学平衡方程,求解得到静压导轨运动直线度,对四油垫静压导轨运动精度进行评价。
具体的,包括以下步骤:
S1、针对油垫尺寸较大的静压导轨,将导轨滑块的模型进行简化,将三维静压导轨简化为二维的导轨、滑块和油垫,方便分析,并为对结构方面进行简化,所以不影响分析的精度。如图1所示;第一油垫11和第二油垫12;m为第一油垫11和第二油垫12的中心距;e
S2、假设导轨面轮廓误差在油垫宽度方向不改变,如静压导轨的导轨面通常分成若干段,每段相当于一个油垫,油垫上具有一定刚度的油膜;图2所示,其中,宽度方向油膜21;长度方向油膜22;l
其中,轮廓误差函数可以拟合成傅里叶级数,导轨面轮廓误差可表示为:
式中:E为误差幅值,λ为轮廓误差波长,
S3、如图2所示,忽略导轨面沿滑块宽度x方向的轮廓误差变化,则在任意位置封油面处的油膜厚度为:
h(y)=h
式中:h
将封油面油膜沿y方向离散成N个宽度为b
当o’从任意位置y向前移动时,设油膜1和2的体积变化量分别为△V1和△V1,当o’从任意位置y1运动到y2时,平均油膜厚度的变化量为:
则o’处于任意位置y时,平均油膜厚度为:
S4、假设润滑油为不可压缩的黏性流体,供油压力p
若节流器流阻为R
则油膜承载力的变化量为:
f
式中,A
当导轨滑块运动时,四油垫静压导轨可以等效为准静态模型,油膜可以简化为线性弹簧单元,则:
式中:e
S5、当滑块运动到任意位置时,各油垫的油膜支承力合力与外载荷平衡,合力与合力矩始终为0,滑块保持平衡状态,如图3所示,则静压导轨静力学平衡方程为:
其中:k
S6、联立前面步骤的静压导轨面轮廓误差方程、油膜厚度方程、油膜支承力方程和静压导轨静力学平衡方程,求得静压导轨运动直线度为:
e
式中,A为滑块结构参数矩阵;B为油膜刚度系数矩阵;C
需要补充一下直线度的具体应用说明,单纯的计算方法无法作为专利主体保护。
本发明提出一种考虑油垫中心距的四油垫静压导轨运动精度评价方法,首先简化油垫中心距较大的静压导轨模型,并将静压导轨的导轨面误差进行数学表达,然后计算静压导轨面轮廓误差的油膜厚度,再建立考虑油垫中心距的油膜力计算模型和静压导轨静力学平衡方程,联立方程求解得到考虑油垫中心距的四油垫静压导轨运动直线度。利用能够对油垫中心距较大的四油垫静压导轨运动直线度进行计算的优点,提出了考虑油垫中心距的四油垫静压导轨静力分析模型,并求解了滑块运动直线度误差,从而为静压导轨精度设计提供了理论指导。
以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。
- 四油垫静压导轨运动精度评价方法及系统
- 一种用于静压导轨的主动控制油垫静压滑块模块