一种移动机器人的底盘缓冲保护结构
文献发布时间:2023-06-19 12:18:04
技术领域
本发明属于机器人电动驱动技术领域,具体涉及一种移动机器人的底盘缓冲保护结构。
背景技术
目前市场上最常见的机器人都设有移动装置,而移动装置需要设有底盘结构,底盘结构是移动机器人最基础的结构之一,它的好坏直接影响到了机器人的稳定安全。但是,常见的移动机器人底盘缓冲保护结构不能很好进行转向,且当机器人不在水平地面上进行行驶时,坑坑洼洼的路面会给机器人的底盘造成一定的损害,因此,需要在底盘上设置有缓冲组件和调节机构,保证底盘缓冲保护结构的正常工作,且不能根据实际路况对安装板的高度进行调节。
发明内容
为解决上述背景技术中提出的问题。本发明提供了一种移动机器人的底盘缓冲保护结构,其解决了不能进行很好的转向、遇见凹凸不平的路面时不能很好的缓冲和遇见不好爬的坡时,不能对前轮进行调节,不方便爬坡的技术问题。
为实现上述目的,本发明提供如下技术方案:一种移动机器人的底盘缓冲保护结构,包括安装板,所述安装板的底部固定连接有第一电机,所述安装板的底部转动连接有从动齿轮,所述第一电机的输出轴固定连接有主动齿轮,所述主动齿轮与从动齿轮啮合连接,所述从动齿轮的底部固定连接有第一电动推杆,所述第一电动推杆的另一端固定连接有第一缓冲组件,所述安装板的底部另一侧活动连接有支撑杆,所述支撑杆的另一端固定连接有第二缓冲组件,所述第二缓冲组件的顶部活动连接有第二电动推杆,所述第二电动推杆的另一端活动连接在安装板上,所述第一缓冲组件和第二缓冲组件的底部均固定连接有支撑架,两个支撑架上分别设置有第一转轮组和第二转轮组,一个支撑架上固定连接有第二电机,所述第二电机的输出轴穿过支撑架并与第二转轮组固定连接。
作为本发明的进一步方案:所述第一缓冲组件和第二缓冲组件的结构相同,所述第一缓冲组件包括第一支撑板和第二支撑板,所述第一支撑板上开设有滑槽,所述滑槽内滑动连接有两个滑块,所述滑槽的两端均固定连接有第一阻尼器。
作为本发明的进一步方案:两个所述第一阻尼器的相对端分别与两个滑块相互远离的一侧固定连接,两个所述滑块的相对面固定连接有弹簧,两个所述滑块上分别活动连接有两个调节杆,两个所述调节杆的另一端活动连接在第二支撑板上,所述第一支撑板和第二支撑板的相对面活动连接有第二阻尼器。
作为本发明的进一步方案:两个所述第一支撑板的底部分别与两个支撑架固定连接。
作为本发明的进一步方案:一个所述第二支撑板的顶部与第一电动推杆的底端固定连接,另一个第二支撑板的顶部分别与第二支撑杆和第二电动推杆连接。
作为本发明的进一步方案:所述安装板的底部固定连接有蓄电池。
与现有技术相比,本发明的有益效果是:
1、该移动机器人的底盘缓冲保护结构,通过第一电动推杆、第二电动推杆和支撑杆等的设置,当遇见坡时,第二电动推杆缩短,带着安装板的前端微微翘起,同时第一电动推杆缩短,同时第二电机工作可以带着第一转轮组越过坡,在第一电机、主动齿轮和从动齿轮的等的共同作用下,可以对第一转轮组的朝向进行改变。
2、该移动机器人的底盘缓冲保护结构,通过第一缓冲组件和第二缓冲组件的设置,在行走时起到了缓冲的作用,在调节杆、弹簧、滑块、滑槽和第一阻尼器的作用下,起到缓冲的作用,对安装板上的机器人部件进行了保护。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
图1为本发明立体的结构示意图;
图2为本发明正视剖面的结构示意图;
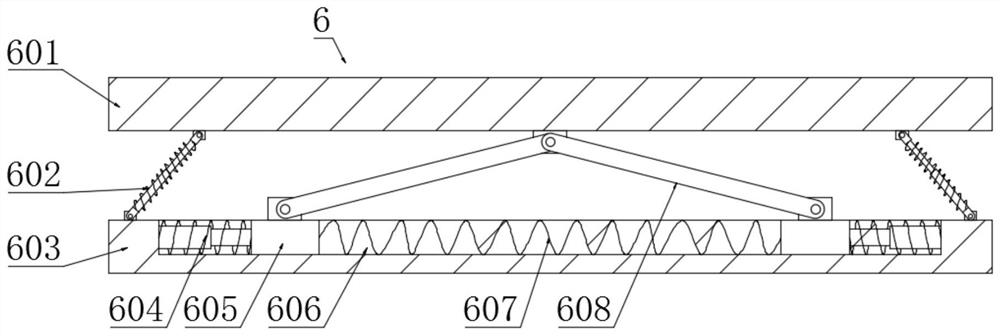
图3为本发明中第一缓冲组件的结构示意图;
图4为本发明中弹簧的结构示意图;
图中:1、安装板;2、从动齿轮;3、主动齿轮;4、第一电机;5、第一电动推杆;6、第一缓冲组件;601、第二支撑板;602、第二阻尼器;603、第一支撑板;604、第一阻尼器;605、滑块;606、滑槽;607、弹簧;607、调节杆;7、第一转轮组;8、蓄电池;9、支撑杆;10、第二电动推杆;11、第二缓冲组件;12、第二转轮组;13、第二电机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
请参阅图1-4,本发明提供以下技术方案:一种移动机器人的底盘缓冲保护结构,包括安装板1,安装板1的底部固定连接有蓄电池8,安装板1的底部固定连接有第一电机4,安装板1的底部转动连接有从动齿轮2,第一电机4的输出轴固定连接有主动齿轮3,主动齿轮3与从动齿轮2啮合连接,在第一电机4、主动齿轮3和从动齿轮2的等的共同作用下,可以对第一转轮组7的朝向进行改变,从动齿轮2的底部固定连接有第一电动推杆5,第一电动推杆5的另一端固定连接有第一缓冲组件6,安装板1的底部另一侧活动连接有支撑杆9,支撑杆9的另一端固定连接有第二缓冲组件11,通过第一缓冲组件6和第二缓冲组件11的设置,在行走时起到了缓冲的作用,第二缓冲组件11的顶部活动连接有第二电动推杆10,第二电动推杆10的另一端活动连接在安装板1上,第一缓冲组件6和第二缓冲组件11的底部均固定连接有支撑架,两个支撑架上分别设置有第一转轮组7和第二转轮组12,一个支撑架上固定连接有第二电机13,第二电机13的输出轴穿过支撑架并与第二转轮组12固定连接,通过第一电动推杆5、第二电动推杆10和支撑杆9等的设置,当遇见坡时,第二电动推杆10缩短,带着安装板1的前端微微翘起,翘起的角度不超过15°,不会造成安装板1倾倒,同时第一电动推杆5缩短,同时第二电机13工作可以带着第一转轮组7越过坡。
具体的,第一缓冲组件6和第二缓冲组件11的结构相同,第一缓冲组件6包括第一支撑板603和第二支撑板601,第一支撑板603上开设有滑槽606,滑槽606内滑动连接有两个滑块605,滑槽606的两端均固定连接有第一阻尼器604,两个第一阻尼器604的相对端分别与两个滑块605相互远离的一侧固定连接,两个滑块605的相对面固定连接有弹簧607,两个滑块605上分别活动连接有两个调节杆607,两个调节杆607的另一端活动连接在第二支撑板601上,第一支撑板603和第二支撑板601的相对面活动连接有第二阻尼器602,在调节杆607、弹簧607、滑块605、滑槽606和第一阻尼器604的作用下,起到缓冲的作用,对安装板1上的机器人部件进行了保护。
具体的,两个第一支撑板603的底部分别与两个支撑架固定连接,一个第二支撑板601的顶部与第一电动推杆5的底端固定连接,另一个第二支撑板601的顶部分别与第二支撑杆9和第二电动推杆10连接。
本发明的工作原理为:
S1、使用时,将第一电动推杆5、第二电动推杆10、第一电机4和第二电机13接入整个机器人的控制系统内,第二电机13带着第二转轮组12转动,在第二转轮组12的作用下,可以带着第一转轮组7转动,从而实现传动,当遇见坡时,第二电动推杆10缩短一定的距离,使第一转轮组7微微翘起,且第二电动推杆10缩短的距离以及安装板1与第二电动推杆10之间的夹角不会造成整个底盘的倾倒,然后第一电动推杆5缩短,使第一转轮组7的高度高过坡,然后第二电机13继续带着第二转轮组12转动,使第一转轮组7越过坡,然后第一电动推杆5恢复到最初的位置,然后第二转轮组12在第二电机13的作用下越过坡,随后,使第二电动推杆10回到最初的位置;
S2、缓冲时,缓冲产生的力挤压两个调节杆607和第二阻尼器602,使两个调节杆607推着滑块605在滑槽606内滑动,并同时挤压第一阻尼器604,同时弹簧607伸长,在弹簧607、第一阻尼器604和第二阻尼器602的作用下,使调节杆607回到最初的位置,从而起到缓冲的作用。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行改动、修改、替换和变型。
- 一种移动机器人的底盘缓冲保护结构
- 一种具有缓冲功能的移动机器人用避障保护装置