一种应用于智慧社区的安全巡检系统
文献发布时间:2024-04-18 19:44:28
技术领域
本发明属于社区安全检测技术领域,尤其涉及一种应用于智慧社区的安全巡检系统。
背景技术
智慧社区是采用数字化对象模型设计和实现思想,通过定义面向社区的数字化模型,融合感知体系获取的社区运行数据,建立起社区给予时空、人物、环境的数据仓库,实现数字化社区的数据归集和融合。研究并融合机器学习、深度学习等人工智能技术,实现智能分析识别、风险人群智能识别、主体监控、风险预测预警、多系统协同联动等数据模型,提升社区安防智能治理手段。
社区公共设施不仅是社区的固定资产,而且是为居民生活服务的重要组成部分,需要在其工作时保持正常状态,当其发生损坏时能够及时进行维修和更换,以此保证人们的正常生活。然而,实际生活中往往由于缺少有效的监测维护技术手段,导致很多社区中的公共设施处于年久失修的状况,损坏的公共设施不仅影响了居民的正常使用,而且也存在着很多风险。
发明内容
为解决上述技术问题,本发明提出了一种应用于智慧社区的安全巡检系统,以解决社区设备损坏不能及时发现的问题。
为实现上述目的,本发明提供了一种应用于智慧社区的安全巡检系统,所述系统包括:
智能巡检车,用于按照设定路线巡检,采集社区信息;
数据终端模块,与所述智能巡检车连接,用于根据所述社区信息判断社区是否存在安全隐患;
报警模块,与所述数据终端模块连接,当判断出社区存在安全隐患时,发出警报通知管理人员。
优选地,所述智能巡检车包括数据采集单元、摆臂式履带车体、动力单元、避障单元和预警单元;
所述数据采集单元用于采集社区信息;
所述摆臂式履带车体用于承载数据采集单元,并按设定路线行驶;
所述动力单元用于为摆臂式履带车提供动力;
所述避障单元用于当设定路线上存在障碍物时控制摆臂式履带车绕过障碍物;
所述预警单元用于当动力单元不能为摆臂式履带车提供巡检社区一圈的动力时,发出预警信号。
优选地,所述数据采集单元包括图像采集子单元和温度采集子单元;
所述图像采集子单元用于采集社区图像;
所述温度采集子单元用于采集社区环境温度。
优选地,所述动力单元包括蓄电池和太阳能板;
所述蓄电池用于为摆臂式履带车供电;
所述太阳能板用于为所述蓄电池充电。
优选地,所述避障单元包括模型构建子单元和计算子单元;
所述模型构建子单元用于根据障碍物信息和摆臂式履带车信息构建计算模型;
所述计算子单元用于根据所述计算模型通过DWA算法计算出最短绕行路线。
优选地,所述数据终端模块包括数据预处理子模块、数据分析子模块和控制子模块;
所述数据预处理子模块用于对社区图像进行预处理;
所述数据分析子模块用于根据预处理过的社区图像和环境温度判断社区是否存在安全隐患;
所述控制子模块用于管理人员根据安全隐患图像控制智能巡检车行驶。
优选地,所述数据预处理子模块包括转换单元、滤波单元和亮度调整单元;
所述转换单元用于将所述社区图像转化为RGB格式;
所述滤波单元用于对RGB格式社区图像进行滤波处理,去除图像噪音;
所述亮度调整单元用于调整去除图像噪音后的社区图像的亮度。
优选地,所述滤波单元包括高斯滤波子单元和中值滤波子单元;
所述高斯滤波子单元用于去除RGB格式社区图像的高斯噪音;
所述中值滤波子单元用于去除RGB格式社区图像的椒盐噪音。
优选地,所述亮度调整单元包括格式转换子单元、阈值设定子单元和数值调整子单元;
所述格式转换子单元用于将社区图像在RGB格式和YUV格式之间转换;
所述阈值设定子单元用于设定亮度阈值;
所述数值调整子单元用于将YUV格式中小于亮度阈值的亮度值调整为亮度阈值。
与现有技术相比,本发明具有如下优点和技术效果:
本发明所述的应用于智慧社区的安全巡检系统,通过摆臂式履带车采集社区信息能够攀登楼梯,受地形影响小,通过分析社区信息能够找出损坏的社区设备和着火区域,通知管理人员维修,避免造成进一步地损失。
附图说明
构成本申请的一部分的附图用来提供对本申请的进一步理解,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
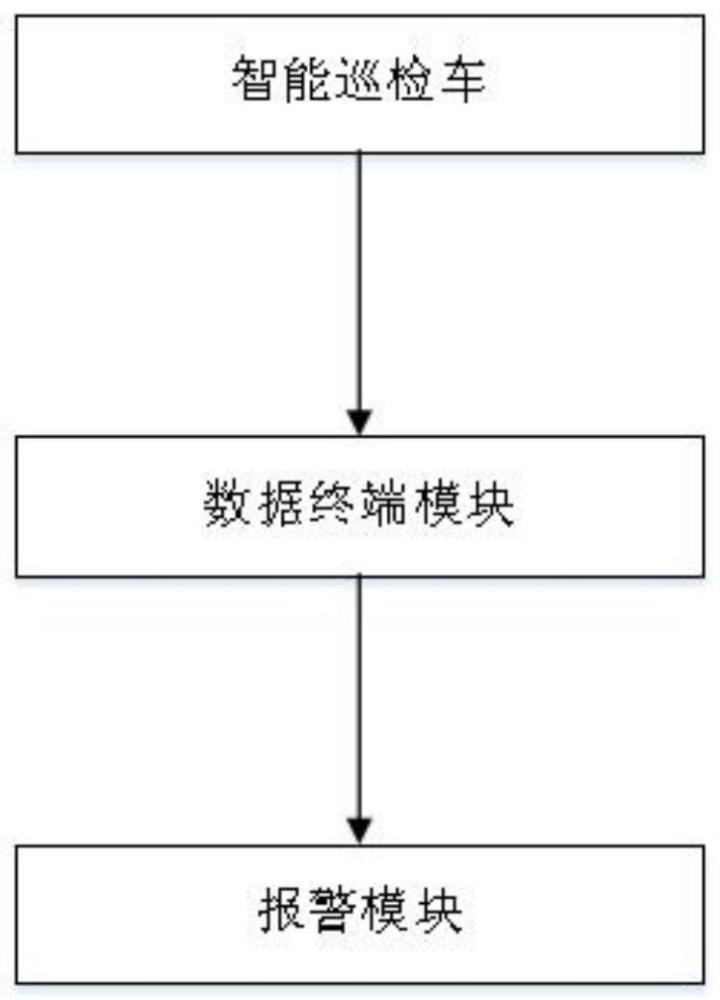
图1为本发明实施例的应用于智慧社区的安全巡检系统结构图。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
如图1所示,本发明提出了一种应用于智慧社区的安全巡检系统,所述系统包括:
智能巡检车,用于按照设定路线巡检,采集社区信息;
数据终端模块,与所述智能巡检车连接,用于根据所述社区信息判断社区是否存在安全隐患;
报警模块,与所述数据终端模块连接,当判断出社区存在安全隐患时,发出警报通知管理人员。
进一步地优化方案,所述智能巡检车包括数据采集单元、摆臂式履带车体、动力单元、避障单元和预警单元;
所述数据采集单元用于采集社区信息;
所述摆臂式履带车体用于承载数据采集单元,并按设定路线行驶;
所述动力单元用于为摆臂式履带车提供动力;
所述避障单元用于当设定路线上存在障碍物时控制摆臂式履带车绕过障碍物;
所述预警单元用于当动力单元不能为摆臂式履带车提供巡检社区一圈的动力时,发出预警信号。
进一步地优化方案,所述数据采集单元包括图像采集子单元和温度采集子单元;
所述图像采集子单元用于采集社区图像;
所述温度采集子单元用于采集社区环境温度。
进一步地优化方案,所述动力单元包括蓄电池和太阳能板;
所述蓄电池用于为摆臂式履带车供电;
所述太阳能板用于为所述蓄电池充电。
进一步地优化方案,所述避障单元包括模型构建子单元和计算子单元;
所述模型构建子单元用于根据障碍物信息和摆臂式履带车信息构建计算模型;
所述计算子单元用于根据所述计算模型通过DWA算法计算出最短绕行路线。
进一步地优化方案,通过DWA算法计算出最短绕行路线的方法包括:
首先通过DWA算法进行速度采样,对采样的速度增加约束,得到约束速度;
然后在所述约束速度范围内遍历速度空间,生成速度和角速度的组合,基于速度和角速度的组合通过摆臂式履带无人车运动学模型生成预测时间内车辆可追踪的轨迹;
最后对所述轨迹进行归一化处理,通过目标函数对归一化处理后的轨迹进行评价值计算,获得最短行驶路径。
进一步地优化方案,所述数据终端模块包括数据预处理子模块、数据分析子模块和控制子模块;
所述数据预处理子模块用于对社区图像进行预处理;
所述数据分析子模块用于根据预处理过的社区图像和环境温度判断社区是否存在安全隐患;
所述控制子模块用于管理人员根据安全隐患图像控制智能巡检车行驶。
进一步地优化方案,所述数据预处理子模块包括转换单元、滤波单元和亮度调整单元;
所述转换单元用于将所述社区图像转化为RGB格式;
所述滤波单元用于对RGB格式社区图像进行滤波处理,去除图像噪音;
所述亮度调整单元用于调整去除图像噪音后的社区图像的亮度。
进一步地优化方案,所述滤波单元包括高斯滤波子单元和中值滤波子单元;
所述高斯滤波子单元用于去除RGB格式社区图像的高斯噪音;
所述中值滤波子单元用于去除RGB格式社区图像的椒盐噪音。
进一步地优化方案,具体滤波方法如下:
高斯滤波的目的主要是滤掉图像中的高斯噪音,原理是利用高斯核的各向同性和可分离性,创建一个合适的高斯核对图像中的像素值进行加权平均。由于图像是二维的,因此属于二维高斯分布,可以列出如下方程:
考虑到图像像素在矩阵中是以离散的形式存在,因此需要离散近似。在实际操作中,用卷积矩阵扫描水线图像中的每个像素,用卷积确定的邻域内像素的加权平均值去替代卷积中心像素点的值。
完成高斯滤波后,下面进行中值滤波,目的是去除社区图像中由于图像切割造成的椒盐噪音。利用m*n的模板对大小为M*N的图像进行中值滤波的公式如下所示:
其中m=2a+1,n=2b+1。
进一步地优化方案,所述亮度调整单元包括格式转换子单元、阈值设定子单元和数值调整子单元;
所述格式转换子单元用于先将社区图像的RGB格式转换为YUV格式,当调整完成后在将YUV格式转换为RGB格式;
所述阈值设定子单元用于设定亮度阈值;
所述数值调整子单元用于将YUV格式中小于亮度阈值的亮度值调整为亮度阈值。
转换为YUV格式后Y代表亮度,UV代表色彩,这时可以将亮度信息单独调出调整,减小数据处理量。
进一步地优化方案,判断社区是否存在安全隐患的方法包括:
在智能巡检车开始巡逻前先设定温度阈值,通过温度传感器检测社区巡检路线上的温度,当出现检测温度高于温度阈值的情况,则判断为失火区域;
根据拍摄的图像检测墙体或栅栏是否存在裂纹,当墙体或栅栏存在裂纹时,判定为存在安全隐患;
根据拍摄的图像检测公共设施时,通过拍摄的设施与新设施图像对比,当设施存在变形或开裂的情况时,判定为存在安全隐患。
进一步地优化方案,智能巡检车上还可以安装定位器,当发现存在安全隐患时发送智能巡检车所在位置。
以上,仅为本申请较佳的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应该以权利要求的保护范围为准。